разработка моделей на нейронных сетях сериесного двигателя
реклама

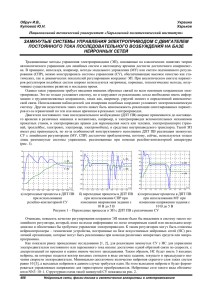
ІНФОРМАЦІЙНІ СИСТЕМИ І МОДЕЛЮВАННЯ УДК 621.313 РАЗРАБОТКА МОДЕЛЕЙ НА НЕЙРОННЫХ СЕТЯХ СЕРИЕСНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПО ЭКСПЕРИМЕНТАЛЬНЫМ ДАННЫМ Орловский И.А., доц., к.т.н., Блохин И.В., Смирнов А.С., маг. Запорожский национальный технический университет (ЗНТУ) ул. Жуковского 64, 69063, г. Запорожье ЗНТУ, каф. ЭПА E-mail: i_orlovsky@mail.ru, blok@mail.zp.ua, alexsandr_@i.ua Из экспериментальных данных режима работы двигателя постоянного тока последовательного возбуждения (ДПТ ПВ) получены методом расчёта и обучения его математические модели на полиномиальных рекуррентных нейронных сетях (РНС). Ключевые слова: двигатель постоянного тока, нейронная сеть, электропривод, математическая модель. Введение. Наличие в современных электропримителя UZ1, подключенного к сети переменного водах (ЭП) мощных вычислительных ресурсов дает тока через автотрансформатор ТV1. Регулирование возможность применить интеллектуальные системы момента нагрузки на валу М1 не выполнялось, рассматривался режим холостого хода. для получения математических моделей ЭП с объектом и оптимальной настройки регуляторов. Поиск градиентными или генетическими алгоритмами оптимальных параметров регуляторов требует сотни и тысячи повторных запусков объекта, что в большинстве случаев возможно только на модели объекта, которая корректируется в реальном времени, что приводит к необходимости получения математической и имитационной моделей ЭП и механизма в реальном времени. Такие модели позволят получить новые знания относительно свойств самого объекта и выполнить исследования и оптимальную настройку его системы управления. Анализ предыдущих исследований. В ряде раРисунок 1 – Схема стенда бот, например [1, 2], разработана методика получения моделей нелинейных электромеханических объДля измерения данных режима работы оборуектов на полиномиальных РНС (ПРНС), однако не дования во время переходных процессов подклюрассмотрены модели при наличии нелинейной завичён блок датчиков. В токовой цепи используется симости момента сопротивления от скорости двигадатчик Холла типа ACS фирмы Allegro MicroSysтеля, отсутствует проверка режимов работы полуtems, а для измерения напряжений – датчики наченных моделей с режимами работы реального обопряжения на основе резисторных шунтов и микрорудования. схем гальванической развязки HCPL 7800 [3, 4], Цель работы. Из экспериментальных данных выполненные в виде отдельного измерительного режима работы ДПТ ПВ получить с высокой точномодуля «Датчики» (рис. 1) на кафедре САУЕ стью его математическую модель на РНС, при налиКДПУ им. М. Остроградского в лаборатории дочии нелинейной зависимости момента сопротивлецента Калинова А.П. Датчики имеют невысокий ния от скорости. Сравнить режимы работы полукласс точности (но и невысокую стоимость), что ченных математических моделей с режимами рабовполне допустимо для проверки на начальном этаты реального оборудования. пе методики и программного обеспечения получеДля выполнения исследований использовался ния моделей электрооборудования на РНС. установленный на кафедре «Электропривода и авПодключение датчиков к порту USB персональтоматизации промышленных установок» ЗНТУ ланого компьютера осуществляется через модуль бораторный стенд (рис. 1), предназначенный для mDAG, разработанный компанией «ХолтитТМ Дейта снятия механических и электромеханических харакСистемс». Этот модуль включает в себя теристик ДПТ ПВ. Исследуемой машиной М1 явля8-канальный АЦП, 10 бит, 100 кГц, 2 канала ЦАП и ется ДПТ ПВ типа ПБ32 со следующими паспортуниверсальные каналы дискретного ввода/вывода. ными данными: Pн=1 кВт, U=220 В, I=5,5 А, n=1500 Программное обеспечение выполнено в пакетах об/мин, J Д =0,029 кг·м2. На одном валу с М1 нахоLabView и Matlab. Для сохранения и отображения измеренных данных использовалось программное дится нагрузочный генератор М2 типа ПН 45, предобеспечение в пакете LabView, разработанное на назначенный для образования регулируемой нагрузкафедре САУЕ КДПУ [3, 4]. ки на валу М1, а в нашем случае для измерения угВ режиме холостого хода двигателя момент соловой скорости ω якоря двигателя (далее скорости). противления является нелинейной функцией от скоПаспортные данные машины М2: Pн=2,6 кВт, рости двигателя, поэтому необходимо разработать U=230 В, I=11,3 А, n=1440 об/мин. Для питания математическое описание модели ДПТ ПВ на РНС исследуемого двигателя используется однофазный при наличии этой нелинейности. автотрансформатор ТV2 и выпрямитель UZ2. Обмотка возбуждения машины М2 питается от выпряВісник КДУ імені Михайла Остроградського. Випуск 3/2010 (62). Частина 1 153 ІНФОРМАЦІЙНІ СИСТЕМИ І МОДЕЛЮВАННЯ Модель ДПТ ПВ на РНС при нелинейной зависимости момента сопротивления от скорости двигателя. Статический момент сопротивления МС возникает из-за трения в подшипниках ДПТ ПВ (М1) и в нагрузочном генераторе (М2), при этом ток якоря М2 равен нулю. Входным сигналом является напряжение U на ДПТ ПВ, поступающее от сети через автотрансформатор и двухполупериодный выпрямитель. Выходные координатами двигателя: якорный ток I и скорость ω якоря двигателя. Процессы в ДПТ ПВ описываются системой нелинейных уравнений [1]: dI (t ) L(I) + I (t )Rd = U (t ) − сФ(I) ⋅ ω(t ), dt (1) dω(t ) J = сФ(I (t ) ) ⋅ I (t ) − M C(ω(t ) ) , dt где Rd – эквивалентное активное сопротивление цепи постоянного тока; L(I ) – эквивалентная индуктивность цепи постоянного тока, зависящая от тока якоря двигателя (включает в себя индуктивность двигателя и автотрансформатора); сФ(I ) – произведение конструктивной постоянной с двигателя на значение магнитного потока Ф , зависящего от тока якоря; J – суммарный момент инерции на валу. Для данного объекта вектором состояния является: x = [ I , ω]T ; вектором входных сигналов – u = [U Д ,1]T . Второй элемент вектора u взят равным единице для обеспечения общности выражений при описании момента сопротивления в виде нелинейного коэффициента M C (ω) . С учётом сделанных обозначений, система (1) может быть представлена в матричном виде: (2) x& = Ах + Вu , где матрицы нелинейных коэффициентов A и B имеют вид: L−1 ( I ) 0 − Rd L−1( I ) − L−1 ( I )cФ( I ) , В = A= 1 − 0 − J M C (ω) J −1cФ( I ) 0 . (3) Для получения общих выражений расчёта и обучения весовых коэффициентов ПРНС (с использованием которых формируются полиномы имеющихся в объекте нелинейностей) запишем систему уравнений (2) в виде: (4) x& = CY , T T где Y = [ x1 , x2 , u1 , u 2 ] = [ y1 , y 2 , y3 , y 4 ] – вектор, объединяющий векторы состояния объекта и входных сигналов. Матрица C , объединяющая матрицы A и B , представлена ниже: − Rd L−1 ( I ) − L−1 ( I )cФ( I ) L−1 ( I ) 0 = C= J −1cФ( I ) 0 0 − J −1M C (ω ) (5) c11 c12 c13 0 = . c 21 0 0 c 24 Структурная схема модели ДПТ ПВ на ПРНС с использованием полиномиальных блоков дана на рис. 2. Полиномиальные блоки POL формируют произведения (с единичными коэффициентами) полиномиальных членов степени r от сигналов, по- ступающих на входы " r ", на сигнал, поступающий на вход "(1 )". Сигналы, поступающие на входы " r " блоков POL, нормализуются с помощью блоков нормализации. Выходы блоков POL обозначим векторами hij с такими же индексами, как у элементов векторов весовых коэффициентов wij и элементов cij матрицы С . При аппроксимации нелинейностей полиномами второго порядка вектор h1 , объединяющий для первого нейрона вектора h1,1 , h1, 2 и h1,3 , определяется следующим образом: h1n = [ I n −1 , I n −1 I n −1 , I n −1I n2−1 , ωn −1 , ωn −1 I n −1 , (6) ωn −1 I n2−1 , U n , U n I n −1 , U n I n2−1 ]T . Аналогично, для второго нейрона h2 n = [ I n −1 , I n −1 I n −1 , I n −1 I n2−1 , 1, ωn −1 , ω2n −1 ]T . (7) Рисунок 2 – Структура модели ДПТ ПВ на ПРНС С учётом приведенных выше обозначений, систему уравнений (2) можно представить в следующем виде: x in = x in−1 + wi1hi1n + wi 2 hi 2 n + ... + wiK hiKn , i =1,2 (8) или более компактно следующим образом: wi hin = ∆xin , i = 1,2 . (9) Весовые коэффициенты ПРНС, исходя из уравнения (4) [1, 2] для дискретной системы с тактом счёта T , могут быть вычислены из математической модели ДПТ ПВ по формуле: w11 w12 w13 0 W = Pol r ( TC ) = (10) , w21 0 0 w24 где Pol r ( ) – функция, определяющая вектор коэффициентов полинома степени r для выражения, находящегося в скобках, wij = Pol r (Tcij ) . Для расчёта коэффициентов ПРНС из экспериментальных данных необходимо иметь количество уравнений, равное или большее числу N неизвестных весовых коэффициентов ПРНС. Для этого выполняются измерения входных сигналов и вектора состояния объекта в M ≥ N последовательных тактах счёта. Тогда каждое из уравнений системы (8) даёт M уравнений: wi* hi* = ∆xin* , (11) Вісник КДУ імені Михайла Остроградського. Випуск 3/2010 (62). Частина 1 154 ІНФОРМАЦІЙНІ СИСТЕМИ І МОДЕЛЮВАННЯ wi* = [ wi ,..., wi ]T , размера где ( M × 1) ; i = 1,.2 , = [hin ,..., hin − M +1 ] , = [∆xin , ..., ∆xin −M +1 ] . Если число уравнений равно числу неизвестных коэффициентов ПРНС ( M = N ), тогда матрица искомых весовых коэффициентов определяется через обратную матрицу. На практике число измерений необходимо взять больше M и определение весовых коэффициентов выполнять расчётом минимального среднеквадратичного отклонения для всех уравнений с помощью псевдообратных матриц (hi* ) + по выражению [2]: * ∆xin hi* * (hi* ) + . wi* = ∆x in (12) Обеспечение точной работы модели в начальный момент времени достигается заданием вектора начальных состояний во временных задержках ПРНС. Обучение ПРНС можно выполнять отдельно для каждого нейрона с использованием алгоритмов обучения одиночного нейрона, так как известны вектор входных сигналов и вектор состояния в каждом такте счёта, а следовательно и вектора hi . Цель процесса обучения – минимизация суммарных среднеквадратичных ошибок E i ( i – номер нейрона) между элементами вектора состояния объекта и выходными сигналами ПРНС при одинаковой последовательности входных сигналов, при этом: 1 NV 2 ∑ ein , ein = ∆xin − ∆g in , (13) 2 n =1 где e i n – ошибка выхода i -го нейрона в n -ом такте Ei = счёта; NV – объём обучающей где hikn – значения k -го элемента вектора hi для данных n -ого такта. Коррекция весовых коэффициентов i -го нейрона ПРНС (вектор wi ) производится на основе градиентного метода обучения: wi = wi + ∆w i = w i − η ∂Ei n ∂w i = w i + ηein hi kn (15) kт −1 kт kт −1 kn kт −1 где ∆w i kn - приращение веса k -го элемента вектора wi для сигналов, измеренных в n -ом такте; η - ко- эффициент обучения. Каждый из весовых коэффициентов wi , j (i = 1, 2; j = 1,..., 4) в общем виде при нелинейности коэффициента c i, j от одной переменной, представляет собой вектор, состоящий из коэффициентов полиномиального разложения этой нелинейности: wi , j = wi, j 0 , wi, j1 , ..., wi , jr . (16) Весовые коэффициенты модели на ПРНС могут быть вычислены из известной математической модели по следующим уравнениям: [ w1,2 = TPol (− L ( I )cФ( I )) , w1,3 = TPol ( L−1 ( I )) , −1 w2,1 = TPol ( J cФ ( I )) , w2,4 = TPol ( − J −1M C (ω )) . ] −1 (17) Если найдены весовые коэффициенты ПРНС методом расчёта или обучения из экспериментальных данных режима работы двигателя, то из них могут быть идентифицированы существующие нелинейности внутренних параметров двигателя. Результаты измерений и моделирования. Для обучения и расчёта моделей ДПТ ПВ на ПРНС осуществлялся пуск двигателя (включался автомат QF3 (рис.1)) без нагрузки. Измерялись: напряжение, подаваемое на двигатель, ток двигателя и напряжение на якоре машины М2, используемое в качестве сигнала скорости ДПТ ПВ. В измеряемых сигналах присутствовали помехи, поэтому для тока M1 и напряжения М2 выполнялась цифровая фильтрация. В табл. 1 приведены значения весовых коэффициентов ПРНС второй степени, рассчитанные (NN_calc) по уравнению (12) и обученные (NN_tr) в течение одной эпохи алгоритмом обучения (15). Расчёт и обучение ПРНС выполнялся для всего набора экспериментальных данных. Таблица 1 – Значения коэффициентов ПРНС w11 выборки; ∆g in = g in − g in −1 – разность в n -ом такте между текущим g in и предыдущим g in −1 значениями i -го элемента выходного вектора ПРНС. Используя уравнение (8), частная производная ошибки Ei по весовому коэффициенту wik при обучении на данных n -ого такта имеет вид: ∂Ein ∂w i kn = −ein ⋅ hikn , (14) kт w1,1 = TPol (− Rd L−1 ( I )) , T w12 w13 w21 w24 ПРНС Значения весовых коэф.×10-4 NN_calc 332,32 -41,874 1,3507 NN_tr 332,51 -41,919 1,3519 NN_calc 3,594 -4,937 0,2109 NN_tr 3,6688 -4,6899 0,2156 NN_calc 0,9854 -0,5529 0,03194 NN_tr 0,9859 -0,5535 0,03211 NN_calc -86,454 23,273 -1,079 NN_tr -84,832 22,837 -1,0587 NN_calc 1,3 3,8795 -0,03099 NN_tr 1,27 3,8791 -0,03158 Элементы w11 , w12 , w13 , w21 и w22 матрицы весовых коэффициентов w представляют собой векторы, состоящие из коэффициентов полиномов второй степени, зависящих от одной переменной. Эти полиномы упрощаются до степенных рядов, каждый из которых имеет 3 коэффициента. На рис. 3, а показан фрагмент напряжения на ДПТ ПВ, на рис. 3, б экспериментально полученная зависимость M C (ω) , на рис. 4, а и рис. 4, б – соответственно, даны сигналы отработки тока и скорости ДПТ ПВ (сплошной линией), рассчитанной ПРНС (штриховой линией) и обученной ПРНС (точечной линией). U, (V) 100 80 60 40 20 0 1.3 1.32 1.34 1.36 1.38 1.4 t, c 1.42 а) б) Рисунок 3 – Переходной процесс в ДПТ ПВ и его моделях на ПРНС Вісник КДУ імені Михайла Остроградського. Випуск 3/2010 (62). Частина 1 155 ІНФОРМАЦІЙНІ СИСТЕМИ І МОДЕЛЮВАННЯ ω, ωnn calc, ωnn tr, (1/c) I, Inn calc, Inn tr, (A) 50 10 40 I Inn calc Inn tr 8 6 ω ωnn calc ωnn tr 30 20 4 10 2 0 0 0 -10 0 1 2 3 4 t, c 5 1 2 3 4 t, c 5 а) б) Рисунок 4 – Переходной процесс в ДПТ ПВ и его моделях на ПРНС Ошибки отработки координат привода этими ПРНС даны на рис. 5. Для сравнения точности моделей на ПРНС в табл. 2 приведены значения максимальных ошибок отработки координат для данного режима. 0.6 I-Inn calc, I-Inn tr, % 1 0.5 0.4 ω-ωnn calc, ω-ωnn tr, % ω-ωnn calc ωap-ωnn tr 0 0.2 -0.5 0 -1 -0.2 -1.5 -0.4 -2 0 1 2 3 4 t, c 5 -2.5 0 1 2 3 4 t, c 5 a) токи ДПТ ПВ б) скорости ДПТ ПВ Рисунок 5 – Сигналы ошибок ПРНС Таблица 2 – Значения ошибок ПРНС Максимальные ошибки в % ПРНС ω I NN_calc 1,8 1 NN_tr 1,8 4 Сравнение режимов работы полученных моделей на ПРНС и ДПТ ПВ при подаче пониженного в 2 раза напряжения на ДПТ ПВ показало значительное увеличение максимальных ошибок отработки координат, что, согласно работе [1], свидетельствует о необходимости повышения степени ПРНС Выводы 1. По предложенной методике из измеренных и отфильтрованных сигналов координат ДПТ ПВ рассчитаны и обучены модели этого двигателя на ПРНС при наличии нелинейной зависимости момента сопротивления от скорости 2. Проверка моделей на ПРНС на данных, используемых для расчёта и обучения, показала высокую точность моделей (максимальная относительная ошибка по току и скорости не превышала 4%). ЛИТЕРАТУРА 1. Орловский И.А. Расчёт моделей нелинейных электромеханических объектов на полиномиальных рекуррентных нейронных сетях из их известных математических моделей / И.А. Орловский // Технічна електродинаміка. – 2009. – №1. – С. 20–31. 2. Орловский И.А., Синявский А.А. Расчёт и обучение моделей нелинейных электромеханических объектов на полиномиальных рекуррентных нейронных сетях / И.А. Орловский, А.А. Синявский. // Искусственный интеллект. – 2008. – №3. – С. 579–590. 3. Калінов А.П. Комп’ютерний лабораторний комплекс для вивчення цифрових систем керування з функцією імітації технологічного навантаження / А.П. Калінов, О.В. Прітченко, Д.Г. Мамчур // Вісник КДПУ ім. М. Остроградського. – Кременчук: КДПУ, 2009. – Вип. 3/2009 (56). Ч. 1. – С. 8-12. 5. Родькин Д.И. Лабораторные исследовательские комплексы на базе измерительно-управляющих компьютеризованных систем / Д.И. Родькин, А.В. Бялобржеский, Т.В. Величко, В.В. Грабко / Вісник КДПУ ім. М.Остроградського. – Кременчук : КДПУ, 2002. – Вип. 1/2002 (12). – С. 412-418. Статья поступила 18.03.10 г. Рекомендована к печати к.т.н., доц. Перекрестом А.Л. РОЗРОБКА МОДЕЛЕЙ НА НЕЙРОННИХ МЕРЕЖАХ СЕРІЄСНОГО ДВИГУНА ПОСТІЙНОГО СТРУМУ ЗА ЕКСПЕРИМЕНТАЛЬНИМИ ДАНИМИ Орловський І.А., доцент, к.т.н., Блохін І.В., Смірнов О.С., маг. Запорізький національний технічний університет (ЗНТУ), м. Запоріжжя вул. Жуковського 64, 69063, м. Запоріжжя ЗНТУ, каф. ЕПА E-mail: i_orlovsky@mail.ru, blok@mail.zp.ua, alexsandr_@i.ua З експериментальних даних режиму роботи двигуна постійного струму послідовного збудження (ДПС ПВ) отримані методом розрахунку і навчання його математичні моделі на поліноміальних рекуррент-них нейронних мережах (РНС). Ключові слова: двигун постійного струму, нейронна мережа, електропривод, математична модель. DEVELOPMENT OF MODELS ON NEURON NETWORKS OF SERIES ENGINE DIRECT CURRENT FROM EXPERIMENTAL DATA I. Orlovskiy, assistant professor, I. Blokhin, O. Smirnov, magisters Zaporozhia national technical university (ZNTU), Zaporozhia Zaporozhye, 69063, г. street Zhukovskogo 64, ZNTU E-mail: i_orlovsky@mail.ru, blok@mail.zp.ua, alexsandr_@i.ua From the experimental data mode of the direct current motor series excitation (obtained by the method of calculation and study of its mathematical models for polynomial recurrences neural networks. Key words: direct current motor, neural network, the actuator, electric drive, mathematical model. Вісник КДУ імені Михайла Остроградського. Випуск 3/2010 (62). Частина 1 156