9. Линейные пространства
реклама

3
9. Линейные пространства
Нам часто приходится рассматривать некоторые множества
объектов, для которых установлены так называемые линейные
операции: сложение элементов множества и умножение элемента
множества на число из некоторого поля K . Линейные операции
для матриц фиксированного размера и векторов на плоскости
или в пространстве мы рассматривали в первом семестре (п.п.
1.3, 4.1). Вскоре оказалось, что многие другие математические
множества подчиняются линейным операциям, например, множество решений однородной системы линейных уравнений (п. 3.7,
предложение 3.6). При этом ни сами объекты не похожи на свободные векторы, ни линейные операции над этими объектами не
похожи на линейные операции над векторами.
Однако, во всех приведённых примерах есть нечто общее,
позволяющее изучать линейные операции абстрактно, отвлекаясь от конкретной природы изучаемых объектов.
Прежде всего, во всех приведённых примерах линейные операции над элементами данного множества дают в результате элементы того же множества: складывая элементы множества или
умножая их на число, мы вновь получаем элементы того же множества.
Таким образом линейные операции, различные для разных множеств, имеют ряд общих свойств, что позволяет изучать линейные операции вообще.
Изучая множества, с данными в них линейными операциями, их объединяют общим понятием линейного (векторного) пространства. Название линейного пространства “векторным” есть
дань исторической традиции, так как эти понятия были первоначально установлены для векторов на плоскости (в пространстве),
которые и представляют собой первый пример линейного пространства с внутренним законом сложения векторов и внешним
законом умножения вектора на число. В силу этого элементы линейных пространств принято называть векторами, а сами линейные пространства - векторными.
4
Определение линейного пространства обобщает определение
совокупности всех векторов. Это обобщение производится, во-первых, путём отвлечения от конкретной природы элементов множества
с сохранением свойств действий над ними, во-вторых, путём отвлечения от конкретной природы допустимых множителей.
9.1. Определение, аксиомы и примеры линейного
пространства
Пусть имеется множество L , состоящее из каких угодно элементов
a, b, c, ..., x , y, z, ... ,
которые мы будем далее условно называть векторами и поэтому
стрелочку над элементом рисовать не будем.
Вместе с векторами множества L мы будем рассматривать
числа
α, β, γ, ..., ω, ... ,
образующие поле K , сводящееся к полю R для вещественных
чисел и к полю C для комплексных чисел.
Будем считать, что в L определены действия сложения (внутренний закон) и умножения на число (внешний закон), если:
1) для любых векторов a, b ∈ L
a +b∈L ;
2) для любых векторов a ∈ L и любого числа α ∈ K
αa ∈ L .
Определение 9.1. Линейным пространством L над полем K , называется множество L рассматриваемое вместе с заданными в
нём операциями сложения и умножения на число, удовлетворяющее следующим аксиомам:
1o . Для любых векторов a, b ∈ L выполняется свойство коммутативности сложения
a+b= b+a .
o . Для любых векторов a, b, c ∈ L выполняется свойство ассоциа2
5
тивности сложения
(a + b) + c = a + (b + c) .
3o . Для любого вектора a ∈ L существует такой вектор θ ∈ L , что
a+θ=a .
Элемент θ ∈ L будем называть нулевым элементом (вектором).
4 o . Для любого вектора x ∈ L найдётся такой вектор y ∈ L , что
x +y =θ.
Вектор y будем называть противоположным вектору x и обозначать как − x . Очевидно, что вектор x противоположен вектору y .
5o . Для любого вектора a ∈ L и 1 ∈ K
1⋅ a = a .
6o . Для любого вектора a ∈ L и любых чисел α, β ∈ K выполняет-
ся свойство ассоциативности умножения на число
α (βa ) = (αβ )a .
7 o . Для любого вектора a ∈ L и любых чисел α, β ∈ K выполняет-
ся свойство
(α + β) ⋅ a = αa + βa .
8o . Для любых векторов a, b ∈ L и любого числа α ∈ K выполня-
ется свойство
α(a + b) = αa + αb .
Замечание. Если K = R - поле вещественных чисел, тогда L есть
вещественное линейное пространство. Если K = C - поле комплексных чисел, то L есть комплексное линейное пространство.
Примеры линейных пространств.
1. Множество векторов на плоскости и множество векторов в пространстве образуют линейные пространства (предложение 4.1).
2. Множество матриц M m×n фиксированного размера образу-
6
ют линейное пространство (п. 1.3).
3. Нулевой элемент θ сам по себе образует линейное пространство, так как, очевидно, выполнены все восемь аксиом линейного пространства.
4. Координатное пространство R n . Пусть элементами L
являются упорядоченные наборы действительных чисел, по n
чисел в каждом наборе.
Упорядоченность говорит о том, что числа в наборах занумерованы, т.е.
x = (x 1 , x 2 ,..., x n ) , y = ( y1, y 2 ,..., y n ) .
Определим операцию сложения элементов как
x + y = (x 1 , x 2 ,..., x n ) + (y1, y 2 ,..., y n ) = (x 1 + y1 , x 2 + y 2 ,..., x n + y n ) =
= (z1, z 2 ,..., z n ) = z ,
где zi = x i + y i , i = 1,2,..., n .
Операцию умножения элемента x ∈ L на число α ∈ R определим как
αx = (αx 1, αx 2 ,..., αx n ) = (y1 , y 2 ,..., y n ) = y ,
где y i = αx i .
Под нулевым элементом θ будем понимать набор из n нулей
θ = (0,0,...,0 ) .
Элемент
− x = (− x 1 ,−x 2 ,..., −x n )
будет противоположен элементу x = (x 1 , x 2 ,..., x n ) .
Ясно, что будут выполнены все восемь аксиом линейного
пространства и множество упорядоченных наборов L будет действительным линейным пространством - координатным пространством R n .
5. Пространство непрерывных на отрезке [a, b] функций.
Пусть L - множество всех функций непрерывных на отрезке [a, b]
и τ ∈ [a, b] .
Пусть далее x = f (τ ) и y = g(τ ) есть элементы L .
7
Два элемента x и y равны если f (τ ) = g(τ ) на всём отрезкее [a, b] .
Определим операцию сложения как
x + y = f (τ ) + g (τ ) = h(τ ) = z ,
операцию умножения на число как
αx = αf (τ ) = g(τ ) = y .
Под нулевым элементом θ будем понимать функцию
на всём отрезке [a, b] .
θ = Θ(τ ) = 0
Элемент − x = − f (τ ) будем считать противоположным эле-
менту x = f (τ ) .
Легко проверить, что будут выполнены все восемь аксиом линейного пространства и множество L мы можем рассматривать как
линейное пространство функций непрерывных на отрезке [a, b] .
6. Пространство многочленов степени меньше n . Пусть
p(t ) = a0 + a1t + a2 t 2 + ... + an−1t n−1 и q(t ) = b0 + b1t + b2t 2 + ... + bn −1t n −1
многочлены степени меньше n с коэффициентами из K .
Определим операцию сложения как
(
) (
)
p(t ) + q (t ) = a0 + a1t + a2t 2 + ... + an −1t n −1 + b0 + b1t + b2t 2 + ... + bn −1t n −1 =
= (a0 + b0 ) + (a1 + b1 )t + (a2 + b2 )t 2 + ... + (an −1 + bn−1 )t n −1 =
= c0 + c1t + c2t 2 + ... + cn −1t n −1 = g (t ) ,
а операцию умножения на число α ∈ K как
(
)
αp(t ) = α a0 + a1t + a2t 2 + ... + an −1t n −1 = αa0 + αa1t + αa2 t 2 + ... + αan −1t n −1 =
= b0 + b1t + b2 t + ... + bn −1t n −1 = q (t ) .
2
Под нулевым элементом θ будем понимать многочлен
θ = Θ(t ) = 0 + 0t + 0t 2 + ... + 0t n −1 ,
а многочлен − p(t ) = −a0 − a1t − a2 t 2 − ... − an −1t n −1 будем считать противоположным многочлену p(t ) = a0 + a1t + a2 t 2 + ... + an−1t n−1 .
Ясно, что при введённых выше операциях множество много-
8
членов степени меньше n образует линейное пространство.
7. Множество решений однородной (приведённой) системы
линейных уравнений образует линейное пространство (предложение 3.6).
9.2. Элементарные следствия из аксиом линейного
пространства
Независимо от частных особенностей конкретных линейных
пространств, имеют место следующие следствия:
Следствие 9.1. В каждом линейном пространстве имеется только
один нулевой элемент θ .
Пусть у нас имеется два нулевых элемента θ1 и θ 2 , тогда на
основании аксиом 1o и 3o имеем
θ 2 = θ 2 + θ1 = θ1 + θ 2 = θ1 .
Следствие 9.2. Для любого элемента x ∈ L найдётся только один
противоположный ему элемент y = − x .
Пусть у элемента x имеется два противоположных ему элемента y1 и y 2 , т.е.
x + y1 = θ и x + y 2 = θ .
На основании аксиом 1o ÷ 4 o имеем
y 2 = y 2 + θ = y 2 + (x + y1 ) = (y 2 + x ) + y1 = (x + y 2 ) + y1 = θ + y1 = y1 .
Следствие 9.3. Произведение любого элемента x ∈ L на число
α = 0 равно нулевому элементу θ .
Пусть x + y = θ (аксиома 4 o ), тогда с помощью аксиом 2 o ÷ 5o
и аксиомы 7 o получим
0 ⋅ x = 0 ⋅ x + θ = 0 ⋅ x + (x + y ) = (0 + 1)x + y = x + y = θ .
Следствие 9.4. Произведение любого элемента x ∈ L на число (− 1)
равно элементу, противоположному к x .
На основании аксиом 3o , 5o и 7 o имеем
9
x + (− 1)x = (1 − 1)x = 0 ⋅ x = θ
или
(−1)x = −x .
Следствие 9.5. Произведение нулевого элемента θ на любое число α ∈ K есть нулевой элемент θ .
На основании аксиомы 3o и следствия 9.3 имеем
α ⋅ θ = α ⋅ (0 ⋅ x ) = (α ⋅ 0 ) ⋅ x = 0 ⋅ x = θ .
Следствие 9.6. Для любых двух элементов a, b ∈ L существует разность, притом, только одна.
x = b + (− 1) ⋅ a
На основании аксиом 2 o , 3o , 5o , 7 o и следствия 9.3 имеем
x + a = b + (− 1) ⋅ a + a = b + (− 1 + 1) ⋅ a = b + 0 ⋅ a = b ,
т.е. x = b − a .
Или полагая
x +a=b
на основании аксиом 2 o , 3 , 5o , 7 o и следствия 9.3 имеем
x = x + θ = x + (1 − 1) ⋅ a = x + a + (− 1) ⋅ a = b + (− 1) ⋅ a .
o
9.3. Линейная зависимость
Вопросы линейной зависимости свободных векторов, матриц,
решений однородной системы линейных уравнений мы уже рассматривали в первом семестре и мы можем ожидать, что элементы произвольного линейного пространства будут вести себя по отношению к линейной зависимости или независимости так же.
Пусть нам дано некоторое число векторов (будем иметь в виду
условность выражения “вектор”) линейного пространства L
a, b, c, ..., q ∈ L
и произвольный набор чисел
α, β, γ, ..., ω ∈ K .
10
Определение 9.2. Всякий вектор x ∈ L , представленный в виде
x = αa + βb + γc + ... + ωq
(9.1)
называется линейной комбинацией элементов a, b, c, ..., q .
Определение 9.3. Система векторов a, b, c, ..., q называется линейно
зависимой, если существует линейная комбинация (9.1) равная
нулевому вектору θ , где среди чисел α, β, γ, ..., ω хотя бы одно отлично от нуля.
Определение 9.4. Система векторов a, b, c, ..., q называется линейно независимой если равенство
αa + βb + γc + ... + ωq = θ
(9.2)
возможно только в одном случае, когда
α = β = γ = ... = ω = 0 .
Сформулируем несколько предложений о линейной зависимости и линейной независимости элементов линейного пространства, обобщающие и дополняющие рассмотренные в первом семестре свойства линейной зависимости и линейной независимости матриц, свободных векторов и множества решений однородной системы линейных уравнений.
Предложение 9.1. Система из k > 1 векторов линейно зависима
тогда и только тогда, когда хотя бы один из векторов есть линейная комбинация остальных.
Предложение 9.2. Если в систему векторов входит нулевой вектор
θ , то система линейно зависима.
Предложение 9.3. Если часть из векторов a1 , a2 , ..., ak составляет
сама по себе линейно зависимую систему, то и вся система векторов a1 , a2 , ..., ak , ..., an линейно зависима.
Предложение 9.4. Любые векторы входящие в линейно независимую
систему векторов, сами по себе линейно независимы.
Предложение 9.5. Если вектор раскладывается по линейно независимой системе векторов, то его коэффициенты разложения в данной
линейно независимой системе векторов определены однозначно.
9.4. Базис
11
Определение 9.5. Базисом в линейном пространстве L будем называть упорядоченную конечную систему векторов, если:
а) она линейно независима;
б) каждый вектор из L раскладывается в линейную комбинацию векторов этой системы.
Упорядоченность векторов говорит о том, что они занумерованы, и переставляя их местами (перенормируя), мы будем получать различные базисы.
Коэффициенты линейных комбинаций будем называть компонентами или координатами вектора в данном базисе.
Если векторы базиса e1, e 2 , ..., e n записать в виде строки
e = (e1 , e 2 , ..., e n ) ,
(понимая эту запись в смысле формулы (1.3), т.е. понимая под e i
матрицу столбец из координат вектора e i в собственном базисе),
а компоненты ξ1 , ξ 2 , ..., ξ n вектора x в базисе e1, e 2 , ..., e n в виде
столбца
ξ1
ξ2
ξ=
... ,
ξn
который назовём координатным столбцом вектора x , то разложение вектора x ∈ L по базису e1, e 2 , ..., e n можно записать, используя правило суммирования Эйнштейна, как
x = ξi e i
или
(9.3)
12
ξ1
ξ2
x = (e1, e 2 , ..., e n ) ⋅ = eξ
.
...
ξn
(9.4)
Предложение 9.6. Координатный столбец суммы векторов равен
сумме их координатных столбцов. Произведение вектора на число
равно произведению координатного столбца данного вектора на это
число.
x + y = eξ + eη = e(ξ + η) ,
αx = αeξ = e(αξ ) .
Таким образом координатный столбец линейной комбинации векторов, есть линейная комбинация их координатных столбцов с теми же коэффициентами.
Итак, задать в линейном пространстве L базис e1, e 2 , ..., e n ,
это значит установить взаимно однозначное соответствие между векторами линейного пространства и упорядоченными наборами чисел ( ξ1 , ξ 2 , ..., ξ n ), которые мы можем рассматривать как элементы координатного пространства R n (пример 4) или как матрицы строки (матрицы столбцы) длины n (высоты n ). Задание
базиса позволяет нам заданные абстрактно линейные операции
над векторами свести к хорошо изученным нами в первом семестре линейным операциям над матрицами, которые тоже есть не
что иное как элементы векторного пространства.
Предложение 9.7. Элементы векторного пространства линейно
зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы.
Предложение 9.8. Если в векторном пространстве L существует
базис из n векторов, то любая система из n + 1 вектора линейно
зависима.
Предположим, что в векторном пространстве L задан базис e1, e 2 , ..., e n . Рассмотрим систему векторов f 1 , f 2 , ..., f m , m > n .
13
Каждый вектор f i можно разложить по базису e1, e 2 , ..., e n
,
1
2
n
f 1 = eξ1 = ξ1e1 + ξ1 e 2 + ... + ξ1 e n
f 2 = eξ 2 = ξ12 e1 + ξ 22 e 2 + ... + ξ 2n e n ,
.............................................. ,
f m = eξ m = ξ1m e1 + ξ m2 e 2 + ... + ξ nm e n
и из координатных столбцов ξ i можно составить матрицу ξ размера n × m ,
f =
ξ11
f1
f2
ξ2
= (e1 , e 2 , ..., e n ) ⋅ 1
...
...
ξn
fm
1
ξ12
ξ 22
...
ξ 2n
... ξ1m
... ξ 2m
= eξ
... ...
... ξ nm
ранг которой не может превышать n . Поэтому столбцы такой
матрицы будут линейно зависимы, а значит будут линейно зависимы и сами векторы f i .
ТЕОРЕМА 9.1. Если в векторном пространстве L есть базис из
n векторов, то и любой другой базис в L будет состоять из n
векторов.
Определение 9.6. Векторное пространство L в котором существует базис e1, e 2 , ..., e n , состоящий из n векторов, называется n -мерным, а число n - размерностью векторного пространства L , что
записывается как
dim L = n .
Замечание. Размерность нулевого пространства L = {θ} равна
нулю.
Определение 9.7. Векторное пространство называется бесконечно мерным, если для любого целого числа N > 0 в нём найдётся
линейно независимая система состоящая из N векторов.
Пример. Вновь рассмотрим пространство L непрерывных на отрезке [a, b] функций (пример 5, п. 9.1).
14
Покажем, что степенные функции
1, t , t 2 , ..., t N −1 ,
рассматриваемые как элементы пространства L , линейно независимы,
для чего составим произвольную их линейную комбинацию
p(t ) = α 0 + α1t + α 2t 2 + ... + α N −1t N −1 ,
которая, очевидно, есть многочлен степени меньше чем N .
Известно, что всякий многочлен с отличными от нуля коэффициентами имеет лишь конечное число корней. Поэтому
p(t ) ≡ 0
тогда и только тогда, когда
α 0 = α1 = α 2 = ... = α N −1 = 0 .
Таким образом мы установили, что элементы векторного
пространства 1, t , t 2 , ..., t N −1 непрерывных на [a, b] функций линейно независимы. А так как на число N нет никаких ограничений,
рассматриваемое пространство является бесконечномерным.
В ненулевом конечномерном пространстве существует бесконечно много базисов.
Предложение 9.9. В n -мерном векторном пространстве каждая
упорядоченная линейно независимая система из n векторов является базисом.
Пусть x 1 , x 2 ,..., x n - есть базис в L . Покажем, что произволь-
ный вектор y ∈ L раскладывается по нему. В соответствии с предложением 9.8 система векторов
y , x 1 , x 2 , ..., x n
линейно зависима и найдутся такие коэффициенты, что
αy + α1 x1 + α 2 x 2 + ... + α n x n = θ ,
причём α ≠ 0 , иначе система векторов x 1 , x 2 ,..., x n была бы (предложение 9.2) линейно зависимой.
Предложение 9.10. В n -мерном векторном пространстве L n каждую упорядоченную линейно независимую систему из k < n векторов можно дополнить до базиса.
15
Это вытекает из того, что к системе линейно независимых векторов x 1 , x 2 ,..., x k можно добавить ещё один вектор x k +1 , который по
ней не раскладывается, так как в этом случае система x 1 , x 2 ,..., x k бала
бы базисом. Если k + 1 < n , мы можем повторяя операцию добавления векторов в конце концов получить систему из n линейно независимых векторов. В частности, до базиса можно дополнить любой
ненулевой вектор.
9.5.
Замена базиса
Известно, что базис является частью системы координат
(п.4.4), которая в свою очередь входит в понятие системы отсчёта. При решении геометрических задач, средствами аналитической геометрии важную роль играет правильный выбор системы
координат, а при решении физических задач такую же важную
роль играет правильный выбор системы отсчёта, причём, в обеих случаях все сводится к выбору того или иного базиса.
9.5.1. Формулы перехода к новому базису
Пусть в линейном пространстве L n заданы два базиса
e = (e1 , e 2 , ..., e n ) и e′ = (e1′ , e 2′ ,..., e n′ ) .
Разложим векторы базиса e′ по базису e :
e1′ = a11′ e1 + a12′ e 2 + ... + a1n′ e n ,
e 2′ = a12′ e1 + a22′e 2 + ... + a2n′ e n ,
(9.5)
...................................... ,
e n′ = a1n′e1 + an2′e 2 + ... + ann′ e n
или в обозначениях Эйнштейна (п. 1.5)
e i′ = aij′ e j ,
i, j = 1,2,..., n .
(9.6)
16
Так как мы договорились записывать векторы базиса в виде
строки, а координаты вектора в виде столбца, мы можем записать (9.5) так
a11′
2
(e1′ , e 2′ ,..., e n′ ) = (e1, e 2 , ..., e n )⋅ a1′
...
an
1′
a12′
a22′
...
a2n′
... an1′
... an2′
... ...
... ann′
(9.7)
или
e′ = eS .
(9.8)
Матрицу
a11′
a2
S = 1′
...
an
1′
a12′
a22′
...
a2n′
... a1n′
... an2′
... ... ,
... ann′
(9.9)
столбцы которой есть координаты векторов e i′ в базисе e , будем
называть матрицей перехода от базиса e к базису e′ . Линейная
независимость векторов базиса e′ = (e1′ , e 2′ ,..., e n′ ) равносильна линейной независимости столбцов матрицы S , т.е. определитель
матрицы S отличен от нуля
S ≠ 0.
(9.10)
Это и есть единственное условие, налагаемое на матрицу перехода от одного базиса к другому. В остальном коэффициенты
aij′ произвольны и мы можем сформулировать
Предложение 9.11. Пусть задан базис e1, e 2 ,..., e n . Каждая квадратная матрица S порядка n с S ≠ 0 есть матрица перехода от
базиса e1, e 2 ,..., e n к некоторому новому базису e1′ , e 2′ ,..., e n′ .
Это следует из того, что при S ≠ 0 столбцы матрицы S (9.10)
17
линейно независимы и являются координатными столбцами n линейно независимых векторов, которые и составляют базис e1′ , e 2′ ,..., e n′ .
Так как матрица S невырождена она имеет обратную матрицу
S −1 и мы легко можем получить формулу обратного перехода от ба-
зиса e′ к базису e умножив (9.8) справа на S −1
e′S −1 = eSS −1
или
e = e′S −1 .
(9.11)
в подробной записи это будет выглядеть так
e1 = a11′ e1′ + a12′e 2′ + ... + a1n′ e n′ ,
e 2 = a12′ e1′ + a22′e 2′ + ... + a2n′ e n′ ,
(9.12)
...................................... ,
e n = a1n′ e1′ + an2′ e 2′ + ... + ann′ e n′ .
Отметим один частный случай перехода к новому базису e′ ,
когда каждый новый базисный вектор e i′ совпадает со старым базисным вектором e i , умноженным на некоторое число λ i ≠ 0 , т.е.
e1′ = λ1e1 ,
e 2′ = λ 2 e 2 ,
............ ,
e n′ = λ n e n .
В этом случае
λ1
0
S=
0
0
0
λ2
0
0
0
0
... 0 .
... λ N
...
...
В частности, при λ1 = λ 2 = ... = λ n = 1 ,
(9.13)
18
1
0
S=
0
0
0 ... 0
1 ... 0
=E
,
0 ... 0
0 ... 1
базис переходит сам в себя.
9.5.2. Формулы последовательного перехода к новому базису
Пусть S1 - матрица перехода от базиса e к базису e′
e′ = eS1 ,
(9.14)
а S 2 - матрица перехода от базиса e′ к базису e′′
e′′ = e′S 2 ,
(9.15)
тогда переход от базиса e к базису e′′ может быть задан некоторой матрицей S
(9.16)
e′′ = eS .
Подставляя в (9.15) вместо e′ его значение из (9.14), получим
e′′ = e′S 2 = eS1S 2
или
e′′ = eS1S 2 .
(9.17)
Сравнивая последнее равенство с (9.16) мы можем записать
S = S1S 2 .
(9.18)
9.5.3. Преобразование координат вектора при замене базиса
Пусть в линейном пространстве L n заданы два базиса
e = (e1 , e 2 ,..., e n ) и e′ = (e1′ , e 2′ ,..., e n′ ) .
Для любого вектора x ∈ L n имеют место разложения
19
x = ξ1e1 + ξ 2 e 2 + ... + ξ n e n = ξ i e i в базисе e ,
(9.19)
x = ξ1′ e1′ + ξ 2′ e 2′ + ... + ξ n′ e n′ = ξi′ e i′ в базисе e′ .
(9.20)
Поставим перед собой задачу вычислить координаты ξ i′
вектора x относительно базиса e′ по известным его координатам ξ i относительно базиса e .
Пусть нам дана матрица перехода S (9.8) от базиса e к базису e′ . Тогда формула (9.11) даёт нам обратный переход от базиса e′ к базису e , т.е.
e = e′S −1 .
(9.11)
В развёрнутом виде
e i = aii ′e i′
(9.21)
или
e1 = a11′ e1′ + a12′e 2′ + ... + a1n′ e n′ ,
e 2 = a12′ e1′ + a22′e 2′ + ... + a2n′ e n′ ,
(9.12)
....................................... ,
e n = a1n′ e1′ + an2′ e 2′ + ... + ann′ e n′ ,
где
S −1
a11′
a 2′
= 1
...
a n′
1
a12′
a22′
...
′
a2n
a1n′
... an2′
... ... .
′
... ann
...
(9.22)
Подставляя (9.21) в (9.19) получим
x = ξ i e i = ξi aii′ e i′ .
Сравнивая полученное выражение с (9.20) мы можем записать
ξi′ = aii ′ ξ i
или
(9.23)
20
ξ1′ = a11′ ξ1 + a12′ ξ 2 + ... + a1n′ ξ n ,
ξ 2′ = a12′ ξ1 + a22′ ξ 2 + ... + an2′ ξ n ,
(9.24)
..................................... ,
ξ n′ = a1n′ ξ1 + a2n′ ξ 2 + ... + ann′ ξ n .
Сравнивая расположение коэффициентов в (9.24) с матрицей (9.22) мы сразу видим, что коэффициенты в (9.34) образуют
матрицу S −1 и мы можем записать
ξ′ = S −1ξ .
(9.25)
Из (9.25) с учётом, что S −1 ≠ 0 немедленно следует
ξ = Sξ′ .
(9.26)
Пример. На плоскости заданы два базиса e и e′ . Векторы второ-
го базиса имеют в первом базисе координаты (2,5) и (1,3) соответственно.
1. Найти координаты вектора x в базисе e , если известны его
(
)
координаты ξ1′ , ξ 2′ в базисе e′ .
2. В базисе e задан вектор x = ξ1e1 + ξ 2 e 2 . Найти его координаты
в базисе e′ .
3. Найти координаты базиса e в базисе e′ .
Решение.
1. Так как нам заданы координаты базиса e′ в базисе e мы можем записать
e1′ = 2e1 + 5e 2 ,
e 2′ = e1 + 3e 2
(*)
и, следовательно, матрица S перехода от базиса e к базису e′ имеет вид
2 1
.
S =
5 3
21
Используя формулу (9.26) получим
2 1 ξ1′ 2ξ1′ + ξ 2′
⋅ 2′ = 1′
ξ = Sξ′ =
2′
5 3 ξ 5ξ + 3ξ
или
(
′
′
) (
′
′
)
x = 2ξ1 + ξ 2 e1 + 5ξ1 + 3ξ 2 e 2 .
2. Так как мы уже знаем вид матрицы S и ясно, что det S ≠ 0 , нам
достаточно воспользоваться формулой (9.25)
3 − 1 ξ1 3ξ1 − ξ 2
⋅ 2 =
ξ′ = S −1ξ =
1
2
− 5 2 ξ − 5ξ + 2ξ
или
(
)
(
)
x = 3ξ1 − ξ 2 e1′ + − 5ξ1 + 2ξ 2 e 2′ .
3. Поскольку нам уже известен вид матрицы S −1 , для нахождения
координат базиса e в базисе e′ нам надо воспользоваться формулой (9.11)
e = e′S −1 = (e1′
3 − 1
= (3e1′ − 5e 2′
e 2′ ) ⋅
− 5 2
− e1′ + 2e 2′ )
или
e1 = 3e1′ − 5e 2′ ,
e 2 = −e1′ + 2e 2′ .
Полученный результат легко проверить, решив систему
уравнений (*).
9.6.
Ориентация линейного n - мерного пространства
В первом семестре мы рассмотрели вопросы (п. 4.6.3) связанные с ориентацией прямой, плоскости и трёхмерного пространства, являющихся примерами линейных пространств L 1 , L 2
22
и L 3 . Поскольку мы живём в трёхмерном мире, мы можем накладывать довольно жесткие условия на определение ориентации линейного пространства размерности не более трёх.
При решении же вопроса об ориентации вещественного пространства произвольной размерности, мы поступим следующим
образом: выберем в линейном пространстве L n произвольный
базис e = (e1 , e 2 ,..., e n ) и рассмотрим множество квадратных мат-
риц S , порядка n , у которых S ≠ 0 .
Как нам известно (предложение 9.11), всякая квадратная
невырожденная матрица порядка n есть матрица перехода от
базиса e к базису e′
(9.8)
e′ = eS .
Множество невырожденных матриц S разобьём на два класса: класс состоящий из матриц с S > 0 обозначим как S + , а класс
состоящий из матриц с S < 0 - как S − . Ясно, что при этом и множество базисов, определяемых по (9.8) разобьётся на два класса:
а) класс E + (e) , состоящий из базисов e′ = eS , S > 0 ;
б) класс E − (e) , состоящий из базисов e′ = eS , S < 0 .
Предложение 9.12. Классы базисов E + (e) и E − (e) не зависят от
выбора исходного базиса e .
Рассмотрим некоторый базис f ∈ E + (e) . Тогда найдётся такая матрица P ∈ S + , что
f = eP
и для всякого базиса g ∈ E + (f ) найдётся такая матрица Q ∈ S + , что
g = fQ
и
g = ePQ ,
где PQ = P ⋅ Q > 0 , т.е. PQ ∈ S + и g ∈ E + (e) . Это значит, что
E + (f ) ⊆ E + (e) .
23
Так как P > 0 , то и P −1 > 0 , тогда
да
e = fP −1
и e ∈ E + (f ) , т.е. E + (e) ⊆ E + (f ) или E + (f ) = E + (e ) .
Определение 9.8. Вещественное линейное пространство L n называется ориентированным, если из двух классов базисов указан
один. Базисы выбранного класса называются положительно ориентированными.
9.7. Линейное подпространство
Определение 9.9. Подмножество P линейного пространства L
будем называть его подпространством, если каждая линейная
комбинация
k1 x 1 + k 2 x 2 + ... + k m x m
любых векторов x 1 , x 2 ,..., x m ∈ P принадлежит P .
Очевидно, что P тогда и только тогда есть подпространство, когда для любых векторов x , y ∈ P и любых чисел k ∈ K
x + y ∈ P , kx ∈ P .
(9.27)
Это говорит о том, что подпространство P - есть линейное
пространство, так как число k любое, а значит для k = 0 и k = −1
из (9.27) следует, что 0 ⋅ x = θ ∈ P и (−1) ⋅ x = − x ∈ P .
Примеры подпространств
1. В любом линейном пространстве L n нулевой элемент θ
образует наименьшее возможное нулевое подпространство P = {θ}
и само множество L n является максимально возможным подпространством пространства L n . Эти подпространства мы будем
называть тривиальными подпространствами.
2. Рассмотрим однородную систему линейных уравнений с
неизвестными.
Совокупность всех решений этой системы есть
n
подпространство в линейном пространстве столбцов высоты n .
Каждая фундаментальная система решений данной однородной
24
системы есть базис в этом подпространстве. Если ранг системы равен r < n , то фундаментальная матрица состоит из n − r линейно независимых столбцов высоты n и мы имеем подпространство размерности n − r .
3. В пространстве L 3 все векторы, параллельные какой-либо
плоскости или прямой, образуют соответственно подпространства L 2 или L 1 .
9.8. Линейная оболочка
Важным способом построения линейных подпространств
является образование линейной оболочки заданной системы векторов.
Пусть дано некоторое множество P векторов в линейном пространстве L n . Пусть L ′ - совокупность всевозможных линейных
комбинаций, каждая из которых составлена из конечного числа векторов из P . Очевидно, что L ′ есть подпространство в L n .
Действительно, если векторы x , y ∈ L ′ , то их можно представить в виде конечных линейных комбинаций
x = λ1 p1 + λ 2 p2 + ... + λ k pk ,
y = µ1q1 + µ 2 q2 + ... + µ m qm ,
где pi , q j ∈ P , i = 1,2,.., k , j = 1,2,..., m .
Тогда
k
m
i =1
j =1
x + y = ∑ λ i pi + ∑ µ j q j ∈ L ′ ,
k
αx = ∑ (αλ i ) pi ∈ L ′ .
i =1
Мы видим, что x + y и αx есть снова линейные комбинации конечного числа векторов из P .
Построенное таким образом подпространство L ′ называется линейной оболочкой множества P .
25
Примеры линейных оболочек
1. Пусть P - множество векторов e1, e 2 ,..., e n , образующих
базис некоторого пространства L n , тогда линейная оболочка L ′
множества векторов P совпадает со всем пространством L n .
2. Если P состоит из пары неколлинеарных векторов a, b в
L 3 , тогда линейная оболочка L ′ состоит из всех векторов парал-
лельных плоскости этих векторов.
3. Пусть P - множество функций 1, t , t 2 ,..., t n , тогда линейная
оболочка L ′ есть совокупность всех многочленов
p(t ) = α 0 + α1t + α 2t 2 + ... + α n t n
степени не выше n .
Пусть теперь p1, p2 ,..., pm - линейно независимая система векторов из P , такая, что любой вектор по ней раскладывается. Векторы p1, p2 ,..., pm образуют базис в линейной оболочке L ′ , так как
любую линейную комбинацию векторов из P можно представить как линейную комбинацию векторов p1, p2 ,..., pm , так как
любой вектор из P можно разложить по p1, p2 ,..., pm , а затем подставить эти разложения в рассматриваемую линейную комбинацию.
В частности, если P - конечное множество векторов, то мы
имеем
Предложение 9.13. Размерность линейной оболочки множества P
из m векторов меньше или равно m .
Предложение 9.14. Если L ′ - подпространство n -мерного пространства L n , тогда dim L ′ ≤ n . Если dim L ′ = n , тогда L ′ совпадает с L n .
Действительно, любая система из m > n векторов в L ′ содержится так же и в L n и потому линейно зависима. Если базис в
L ′ состоит из n векторов, тогда любой вектор из L n по нему
раскладывается и, таким образом, принадлежит L ′ , откуда L ′ и
L n совпадают.
26
Предложение 9.15. Пусть L k′ - подпространство в L n . Если базис
e1, e 2 ,..., e k в L k′ дополнить до базиса e1, e 2 ,..., e k , e k +1,..., e n в L n , то в
таком базисе все векторы из L k′ и только они будут иметь компоненты
ξ k +1 = ξ k + 2 = ... = ξ n = 0 .
Действительно, если для вектора x имеем
ξ k +1 = ξ k + 2 = ... = ξ n = 0 ,
тогда
x = ξ1e1 + ξ 2 e 2 + ... + ξ k e k
и таким образом x ∈ L k′ .
Обратно, пусть вектор x ∈ L k′ раскладывается в линейную
комбинацию
x = ξ1e1 + ξ 2 e 2 + ... + ξ k e k .
Она же есть разложение вектора x по базису e1, e2 ,..., e k при
ξ k +1 = ξ k + 2 = ... = ξ n = 0 .
(9.28)
(9.28) можно рассматривать как систему из n − k линейных уравнений, связывающих координаты вектора x . Ранг такой системы
равен n − k .
Предложение 9.16. Пусть в L n выбран базис. Тогда координатные столбцы векторов, принадлежащих k -мерному подпространству L k′ (k < n ) , удовлетворяют однородной системе линейных
уравнений ранга n − k .
Пример. Элементы p1 (t ) = 1 + t + t 3 и p2 (t ) = t + t 2 заданы в пространстве многочленов P (3 ) относительно базиса 1, t , t 2 , t 3 . Найти систему линейных уравнений, определяющих линейную оболочку L′ .
Решение. Составим матрицу A из координатных столбцов заданных элементов пространства P (3 ) и пусть её ранг будет равен
27
r . Для того, чтобы элемент p (t ) = ξ1 + ξ 2 t + ξ 3t 2 + ξ 4 t 3 принадлежалл
L′ необходимо и достаточно, чтобы ранг расширенной матрицы
(A ξ) тоже был равен r . Если теперь с помощью элементарных
преобразований привести матрицу (A ξ ) к ступенчатому виду то в
последних n − r строках появятся равные нулю линейные комбинации чисел ξ1 ,...,ξ 4 , которые и дадут нам искомую систему уравнений. Итак
1
1
0
1
ξ1 1
1 ξ2 0
~
1 ξ3 0
0 ξ 4 0
0
1
ξ
2
1
3
0 ξ − ξ − ξ .
0
ξ 4 − ξ1
0
ξ1
3
Так как ранг матрицы A равен 2, тогда для того чтобы ранг
расширенной матрицы (A ξ ) тоже был равен 2 необходимо и
достаточно выполнение условий
ξ1 − ξ 2 + ξ 3 = 0 ,
ξ1 − ξ 4 = 0 .
Это и есть искомая система линейных уравнений, определяющая
линейную оболочку L′ векторов p1 (t ) и p2 (t ) в базисе 1, t , t 2 , t 3 .
9.9.
Сумма и пересечение подпространств
Пусть L ′ и L ′′ - подпространства пространства L n .
Определение 9.10. Суммой подпространств L ′ + L ′′ будем называть линейную оболочку их объединения L ′ U L ′′ .
Это означает, что вектор x ∈ L ′ + L ′′ , и только он, может быть
представлен в виде
x = α i pi + β j q j , pi ∈ L ′ , q j ∈ L ′′ .
(9.29)
28
Если положить x ′ = α i pi и x ′′ = β j q j , то мы получим, что пространство L ′ + L ′′ состоит из векторов представимых в виде
x = x ′ + x ′′ ,
где x ′ ∈ L ′ , x ′′ ∈ L ′′ .
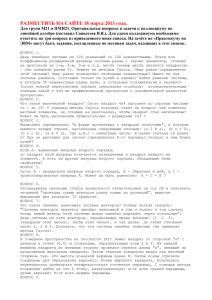
В качестве примера мы можем рассмотреть две плоскости
L 2′ и L 2′′ в пространстве L 3 (рис. 9.1). Здесь пространство L 3 есть
сумма двумерных подпространств L 2′ и L 2′′ : L 3 = L 2′ + L 2′′ .
Положим размерности подпространств
x = x ′ + x ′′ ∈ L 3
x′
dim L ′ = k и dim L ′′ = l
и выберем в них базисы
O
e1, e 2 ,..., e k и f1 , f 2 ,..., f l .
x ′′
Ясно, что каждый векL 2′′
тор x ∈ L ′ + L ′′ раскладываL 2′
Рис. 9.1.
ется
по
векторам
e1, e 2 ,..., e k , f1 , f 2 ,..., f l . Мы получим базис в L ′ + L ′′ если удалим из системы векторов
e1, e 2 ,..., e k , f1 , f 2 ,..., f l те векторы, которые линейно выражаются че-
рез остальные. Для этого можно выбрать в L n базис и составить
матрицу из координатных столбцов всех векторов
e1, e 2 ,..., e k , f1 , f 2 ,..., f l . Векторы, координатные столбцы которых
будут базисными столбцами полученной матрицы и составят базис в L ′ + L ′′ .
Определение 9.11. Под пересечением L ′ I L ′′ подпространств L ′ и
L ′′ будем понимать множество векторов, которые принадлежат
обеим подпространствам.
Очевидно, что L ′ I L ′′ есть подпространство. Это следует из
того, что нулевой вектор θ лежит как в L ′ , так и в L ′′ , а значит и
в L ′ I L ′′ . Далее, если векторы x , y ∈ L ′ I L ′′ , то они лежат как в
L ′ , так и в L ′′ . Тогда их сумма x + y и при любом α вектор αx
29
лежат как в L ′ , так и в L ′′ , а значит и в L ′ I L ′′ .
Нам известно, что в конечномерном пространстве подпространства могут быть заданы системами линейных уравнений.
Тогда их пересечение задаётся системой уравнений, полученной
объединением систем, задающих подпространства.
Если число подпространств s > 2 , т.е. L1, L 2 ,..., L s , то их сумма и пересечение будут определяться аналогично, с соблюдением полученных ранее свойств.
В частности суммой подпространств L1, L 2 ,..., L s будет называться линейная оболочка их объединения, т.е. множество векторов вида x 1 + x 2 + ... + x s , где x i ∈ L i , i = 1... s .
Каждый вектор x i может быть разложен по своему базису
s
e (i ) и тогда любой вектор x = ∑ x i раскладывается по системе
i =1
векторов полученной объединением всех базисов e (1) , e (2 ) ,..., e (s ) .
Число векторов в этой системе есть
(9.30)
dim L1 + dim L 2 + ... + dim L s .
А так как векторы всех базисов в совокупности могут быть
линейно зависимыми, размерность суммы подпространств может
оказаться меньше общего числа векторов в системе:
(
)
dim L1 + L 2 + ... + L s ≤ dim L1 + dim L 2 + ... + dim L s . (9.31)
s
Определение 9.12. Сумма подпространств
∑ Li
i =1
называется пря-
мой суммой если её размерность равна сумме размерностей её составляющих подпространств, т.е. в (9.31) имеет место знак равенства.
Прямую сумму подпространств обозначают символом ⊕ ,
например L = L ′ ⊕ L ′′ .
Предложение 9.17. Для того, чтобы сумма L ′ подпространств
L1, L 2 ,..., L s была прямой суммой
30
L = L1 ⊕ L 2 ⊕ ... ⊕ L s ,
необходимо и достаточно выполнение любого из следующих условий:
1. Любая система из m ≤ s ненулевых векторов, принадле-
жащих различным подпространствам L i (i = 1... s ) , линейно независима.
2. Каждый вектор x ∈ L ′ однозначно раскладывается в сумму
x = x 1 + x 2 + ... + x s , x i ∈ L i , (i = 1... s ) .
3. Пересечение каждого из подпространств L i с суммой остальных есть нулевое подпространство.
4. Объединение базисов подпространств L i (i = 1... s ) есть базис в L ′ .
Покажем, что из определения прямой суммы следует свойство 1, и каждое последующее свойство (2, 3, 4) следует из предыдущего. Так как из свойства 4 следует само определение прямой
суммы подпространств, это будет обозначать равносильность
каждого из свойств определению прямой суммы подпространств.
1. Докажем от противного, что из определения следует свойство 1. Допустим, что нашлась линейно зависимая система ненулевых векторов
x i1 , x i2 ,..., x im ,
(9.32)
таких, что никакие два из них не лежат в одном и том же подпространстве L i . Дополним каждый из этих векторов до базиса в его
подпространстве, а в тех подпространствах, из которых в системе (9.32) представителей нет, выберем базис произвольно.
Объединением этих базисов будет система из
k = dim L1 + dim L 2 + ... + dim L s
векторов. Каждый вектор из L ′ раскладывается по этой системе,
но система эта линейно зависима, так как содержит линейно зависимую подсистему (9.32). В силу этого базис в L ′ содержит меньше, чем k векторов, и размерность суммы меньше суммы размерностей.
2. Покажем, что из 1 → 2 . Допустим, что 2 не выполнено и
31
некоторый вектор x представлен как суммаа
x = x 1 + x 2 + ... + x s
и как сумма
x = y1 + y 2 + ... + y s ,
где x i , y i ∈ L i , (i = 1... s ) .
Тогда
x − x = (x 1 − y1 ) + (x 2 − y 2 ) + ... + (x s − y s ) = θ .
Если хоть одна из разностей x i − y i ≠ θ , мы получаем противоречие со свойством 1.
3. Докажем от противного, что из 2 → 3 . Допустим (для определённости), что L1 имеет ненулевое пересечение с суммой
L 2 + ... + L s . В этом случае существует ненулевой вектор x 1 лежа-
щий как в L1 так и в L 2 + ... + L s и его тогда можно представить
как x 1 = x 2 + ... + x s , т.е. вектор x 1 двумя способами представлен
как сумма векторов, выбранных по одному из каждого L i .
4. Покажем как из 3 → 4 . Рассмотрим систему векторов, по-
лученную объединением базисов подпространств L i (i = 1... s ) .
Каждый вектор из L ′ обязательно раскладывается по этой системе и нам надо показать, что при выполнении условия 3 эта система линейно независима.
Будем рассуждать от противного. Допустим, что существует равная нулевому вектору нетривиальная линейная комбинация
всех векторов, входящих в рассматриваемые базисы подпространств L i (i = 1... s ) . Группируя слагаемые, относящиеся к одному
подпространству, получим равенство вида
x 1 + x 2 + ... + x s = θ ,
где хотя бы один вектор отличен от нулевого. Пусть, для определённости x 1 ≠ θ , тогда
x 1 = − x 2 − ... − x s ,
т.е. ненулевой вектор x 1 ∈ L1 принадлежит и сумме L 2 + ... + L s , что
32
противоречит свойству 3.
Замечание. Если сумма двух подпространств L ′ и L ′′ прямая, т.е.
L = L ′ ⊕ L ′′ , тогда их пересечение нулевое L ′ I L ′′ = {θ} (рис. 9.2).
Заметим так же, что сложение подпространств обладает свойством ассоциативности, т.е.
L 1′′
x ′′
(
) (
)
L1 + L 2 + L 3 = L1 + L 2 + L 3 .
L 2 = L 1′ ⊕ L 1′′
Если L ′ ⊆ L ′′ , то L ′ + L ′′ = L ′′ и в
частности L ′ + L ′ = L ′ .
x ∈ L 1′ ⊕ L 1′′
Предложение 9.18. Для любого подпространства L ′ пространства L n найдётся такое подпространство L ′′ ,
что
L 1′
x′
L = L ′ ⊕ L ′′ .
Рис. 9.2.
Выберем в подпространстве L ′
базис e1, e 2 ,..., e k . На основании предложения 9.10 мы можем дополнить этот базис до базиса пространства L n векторами
e k +1 , e k + 2 ,..., e n , которые можно взять в качестве линейной оболоч-
ки L ′′ . На основании предложения 9.17 п.4 можем записать
L = L ′ ⊕ L ′′ .
ТЕОРЕМА 9.2. Размерность суммы двух подпространств равна
сумме их размерностей минус размерность их пересечения
dim L = dim L ′ + dim L ′′ − dim (L ′ I L ′′) .
(9.33)
Замечание. Если сумма прямая, т.е. L = L ′ ⊕ L ′′ , тогда L ′ I L ′′ = {θ}
и dim L = dim L ′ + dim L ′′ .
Если сумма подпространств не прямая, т.е. L ′ I L ′′ ≠ {θ} , тогда на основании предложения 9.18 найдётся такое подпространство M , что
L ′′ = M ⊕ (L ′ I L ′′) .
(9.34)
Тогда
L = L ′ + L ′′ = L ′ + (L ′ I L ′′) + M .
(9.35)
Так как
33
(L ′ I L ′′) ⊆ L ′ , то
L ′ + (L ′ I L ′′) = L ′
и (9.35) примет вид
(9.36)
L = L ′ + L ′′ = L ′ + M .
Покажем, что L ′ + M - прямая сумма. Для этого рассмотрим произвольный вектор z ∈ L ′ I M . Ясно, что если z ∈ L ′ I M ,
то z ∈ L ′ и z ∈ M ⊆ L ′′ , а тогда z ∈ L ′ I L ′′ и далее z ∈ (L ′ I L ′′ ) I M .
Но из (9.34) следует, что (L ′ I L ′′) I M = θ , т.е. z = θ , а значит
L ′ I M = {θ} и (9.44) примет вид
L = L ′ + L ′′ = L ′ ⊕ M .
(9.37)
Из (9.37) сразу следует, что
dim (L ′ + L ′′) = dim (L ′ ⊕ M ) = dim L ′ + dim M .
С другой стороны
и
откуда
(9.38)
L ′′ = (L ′ I L ′′) ⊕ M
dim L ′′ = dim (L ′ I L ′′) + dim M
dim M = dim L ′′ − dim (L ′ I L ′′ ) .
Подставляя это значение в (9.38) окончательно получим
dim L = dim L ′ + dim L ′′ − dim (L ′ I L ′′) .
(9.39)
Пример. Найти размерность и базис суммы и пересечения линейных подпространств P
и Q в пространстве L4 натянутых на
системы векторов a1 = (1 2 3)T , a2 = (0 1 1)T , a3 = (1 1 2)T ,
b1 = (4 3 1)T , b2 = (1 1 0 )T , b3 = (5 3 2)T соответственно.
Решение. Составим системы уравнений, определяющие линейные оболочки подпространств P и Q :
1 0 1 ξ1 1 0 1
ξ1
2
2
1
ξ − 2ξ
2 1 1 ξ ~ 0 1 −1
.
3
0 0 0 ξ 3 − ξ 2 − ξ1
3
1
2
ξ
34
Подпространство P задано уравнением ξ1 + ξ 2 − ξ 3 = 0 ,
dim P = 2 , векторы a1 , a2 образуют в нём базис.
4 1 5 ξ1 1 0 2
ξ3
2
2
3
3 1 3 ξ ~ 0 1 − 3
ξ − 3ξ
.
3
0 0 0 ξ1 − ξ 2 − ξ 3
1
0
2
ξ
Подпространство Q задано уравнением ξ1 − ξ 2 − ξ 3 = 0 ,
dim Q = 2 , векторы b1 ,b2 образуют в нём базис.
Найдём теперь размерность и базис P + Q . Для этого составим матрицу из базисных столбцов этих подпространств и упростим её:
1 0 4 1 1 0 4 1
2 1 3 1 ~ 0 1 1 1 .
3 1 1 0 0 0 3 1
Ранг упрощенной матрицы равен трём и dim (P + Q ) = 3 . В
качестве базисных столбцов суммы подпространств P + Q можно взять векторы a1 , a2 , b1 .
Пересечение P I Q задаётся объединением систем уравнений, определяющих их линейные оболочки:
ξ1 + ξ 2 − ξ 3 = 0 ,
ξ1 − ξ 2 − ξ 3 = 0 .
Ранг данной системы равен двум и мы можем найти одно
фундаментальное решение c = (1 0 1)T
образующее базис в
PIQ.
dim (P I Q ) = dim P + dim Q − dim( P + Q ) = 1 .