о методе проектирования оси автомобильной дороги как
advertisement

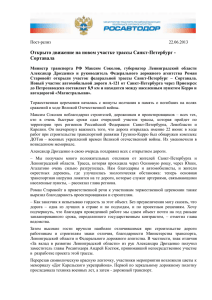
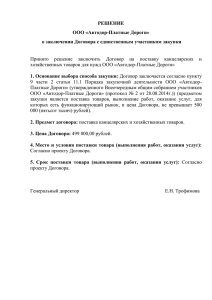
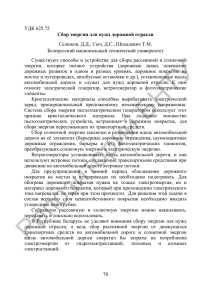
О МЕТОДЕ ПРОЕКТИРОВАНИЯ ОСИ АВТОМОБИЛЬНОЙ ДОРОГИ КАК ПРОСТРАНСТВЕННОЙ КРИВОЙ В.А. ГАЙДУКЕВИЧ, к.т.н., доцент, член-корреспондент Транспортной академии Украины, зав. кафедрой автомобильных дорог, оснований и фундаментов, Национальный университет водного хозяйства и природопользования, г. Ровно Л.М. ПИЛИПАКА, ассистент кафедры автомобильных дорог, оснований и фундаментов, Национальный университет водного хозяйства и природопользования, г. Ровно Анализ исследовательских работ по проектированию современных трасс автомобильных дорог [1–4] показывает, что распространенный на сегодня методологический аппарат проектирования трассы автомобильной дороги является недостаточным. Существует потребность в разработке новых методов определения оптимального положения трассы в трехмерном пространстве [5]. Предлагается метод, дающий возможность проектировщику получать пространственную кривую, которую можно редактировать для достижения ее оптимального положения в пространстве в заданных условиях местности, используя в качестве модели определенным образом изогнутую ось нагруженного стержня. Суть представленного метода заключается в моделировании пространственной кривой оси автомобильной дороги с помощью пространственной кривой изогнутой оси упругого нагруженного стержня. В этом случае «объектом» математической модели является ось дороги, «эквивалентом» – изогнутая ось стержня. Основным критерием при нахождении плавной пространственной кривой оси дороги является кривизна и динамика изменения кривизны моделирующего стержня [3]. Математическая модель при данном автомобильной дороги имеет следующий вид: методе расчета пространственной оси dPQ x + RPx = 0; de dPM x + ( LT i1 ) × PQx + RTx = 0; de PM x = LT KAχ ; dv −1 − L1 KA −1 LPM x = 0; de du x − ( LT − E )i1 = 0 de χ x ≤ χ x max (1) dχ x ≤ χ зміни de где векторы с индексом х представлены через проекции в декартовых осях, т. е. a x = a x i1 + a y i2 + a z i3 , RР, RТ – составляющие условий среды проектирования автомобильной дороги (зависят от характера рельефа и инфраструктуры участка проектирования) – известные ограничения по проектированию дороги исходя из технических параметров и контрольных точек местности; PМ, PQ – параметры состояния имитационной модели (в анализе запроектированной дороги не используются, нужны для нахождения перемещений точек оси имитационной модели); v – углы поворота в точках оси дороги, u – перемещение точек оси дороги, L – матрица направляющих косинусов, KА – коэффициент сопротивления модели, χ – кривизна, Е – единичная матрица, e – безразмерная координата, s = el. χmax – максимальное значение кривизны (согласно нормативам по автомобильным дорогам разных категорий); χизменения – максимальное значение динамики изменения кривизны, представленной скоростью изменения. Схема метода проектирования трассы автомобильной дороги на основании расчета нагруженного пространственного стержня І этап расчета. Подготовительный 1. Размещение моделирующего стержня на карте местности. Для этого соединяем начальную и конечную точки участка трассы воздушной линией. На этой линии размещаем моделирующий стержень, опоры которого совпадают с конечной и начальной точками проектируемой трассы. Отметка плоскости, в которой лежит стержень равняется отметке начальной точки. 2. Нумерация узлов моделирующей конструкции. Разбиваем основной стержень на элементы. Шаг разбивки зависит от характера местности и нужной точности проектирования. 3. Задание опорных точек. Добавляем опорные точки, через которые должна пройти трасса и соответствующие им расстояния до воздушной линии - заданные перемещения, на которые должны сместиться узлы моделирующего стержня. Находим точки на оси, которые отвечают контрольным, с помощью перпендикуляров, опущенных на ось моделирующего стержня, вводим, где это нужно, в эти точки дополнительные узлы и задаем в них соответствующие перемещения. 4. Задание начальных условий. Заданное вертикальное перемещение конечной точки равняется разности отметок точек начала и конца трассы. Замеряем нужные углы поворота в начале и в конце трассы для лучшего сопряжения участка, который рассматривается, с сопредельными участками реконструированной автодороги. Находим координаты всех заданных точек в системе координат, связанной с осью ненагруженного стержня. 5. Задание границ полосы варьирования трассы. Где это необходимо рассчитываем максимальные и минимальные расстояния между препятствиями и воздушной осью. ІІ этап расчета. Основной 1. Расчет моделирующей конструкции. Выполняем статический расчет геометрически нелинейной стержневой конструкции на заданные перемещения. Решение ищем задавая разные жесткости моделирующей конструкции, выбирая оптимальную. Получаем согнутую ось стержня, а значит и пространственную кривую трассы, которая проходит через контрольные точки, заданные перемещениями соответствующих узлов. 2. Расчет геометрических характеристик трассы. Координаты кривой находим суммированием перемещений соответствующих узлов и начальных координат точек воздушной линии, величины радиусов горизонтальных и вертикальных кривых рассчитываем как радиусы круга описанного вокруг треугольника по трем сопредельным точкам кривой. 3. Проверка соответствия величин радиусов кривизны трассы нормативам. Анализируя все точки полученной кривой, решаем на какие элементы моделирующей конструкции следует добавить дополнительную распределенную нагрузку для спрямления согнутой оси. Величины нагрузок и границы их применения находим экспериментально, постоянно сверяя полученные результаты с динамикой изменения кривизны. ІІІ этап расчета. Оптимизация 1.Построение "черновых" плана и профиля 2.Уменьшение величин рабочих отметок и проверка уклонов После нанесения полученного плана трассы на карту местности уточняем необходимые перемещения точек моделирующей конструкции по вертикали, сравнивая их с соответствующими отметками поверхности земли. Определяем уклоны в продольном профиле и рабочие отметки. Если нужно,помощью с дополнительных распределенных нагрузок по вертикали, чаще - введением новых контрольных точек (заданием фиксированных перемещений) значение рабочих отметок максимально уменьшаем, что призвано минимизировать затраты на строительство земляного полотна. Не забывая при этом контролировать величины радиусов вертикальных кривых. 3. Построение графиков Для наглядной оценки запроектированной трассы строим графики изменения радиусов кривизны горизонтальной и вертикальной проекций ІV. Оформление чертежей V. Подготовка данных для вынесения в натуру Рис. 1 Решив данную систему уравнений, мы можем получить: 1) пространственную кривую, которая представляет собой пространственную ось автомобильной дороги с нелинейно изменяемой кривизной; 2) пространственную ось дороги, соответствующие проекции которой дают план и продольный профиль, которые в свою очередь имеют кривизны в пределах необходимых нормативов; величина кривизны отвечает категории проектируемой дороги; 3) ось дороги, которая оптимально вписывается в ландшафт и соответствует контрольным точкам местности; 4) пространственную кривую, которую также легко корректировать с помощью варьирования расчетных нагрузок на стержень для более точного учета условий среды проектирования автомобильной дороги (добавления или снятия внешних нагрузок на моделирующий стержень, изменения характера данных нагрузок, изменения жесткости сечения самого моделирующего стержня); 5) пространственную ось дороги, которую можно корректировать по другим важными показателями, такими как скорость движения по трассе, величины видимости, величины поперечной силы, перспективные изображения. Схема метода представлена на рис.1. Для того чтобы показать как работает метод проектирования оси автомобильной дороги на основе расчета пространственного нагруженного стержня, рассмотрим расчет участка трассы Киев–Чоп км 375+371 – км 349+822. Во-первых, создаем расчетную схему имитационной конструкции. В данном примере моделирующий стержень уместно представить из 146 элементов и 147 узлов. Шаг разбивки на элементы по длине принят разным, наименьший (10 м) соответствует наиболее пересеченному рельефу местности по трассе. Контрольных точек на схеме 6: пересечения с улицами и наибольшие отклонения от воздушной линии. Так как трасса идет в обход города Дубно, были заданы границы полосы варьирования (рис. 2). Данный участок автодороги в натуре имеет сложный вид как в плане, так и в профиле. Средний радиус в плане 550м, минимальный – 450 м. КТ4(1370; -689.8; ?) КТ3(1110; -622.35; 36) КТ5(1570; -673; 52.71) КТ2(500; -155.29; 7.5) 1 КТ6(2122; -425; ?) КТ1(100; -1,42; -1,42) 1 2 3 4 5 y= -0,00142; z= -0,00142 6 КТ7(2499.16; 0; 15.6 7 8 10 y= -0,15529; z= 0,0075 20 30 40 y= -0,62235; z= 0,036 50 60 70 80 y= -0,6898 90 100 110 120 y= -0,673; z= 0,05271 130 140 y= -0,425 147 z= 0,0156 y Задание границ полосы варьирования трассы максимальное минимальное минимальное максимальное верхняя номер точки на оси положительное положительное отрицательное отрицательное граница перемещение перемещение перемещение перемещение 39 40 41 нижня я граница 630 628 634 Рис. 2 После построения схемы переносим моделирующую конструкцию в программный комплекс ЛИРА 9.0. Выполняем статический расчет геометрически нелинейной стержневой конструкции на заданные перемещения. Решение ищем, задавая разные жесткости моделирующей конструкции, выбирая оптимальную. Получаем согнутую ось стержня, а значит и пространственную кривую оси дороги, которая проходит через контрольные точки в первом приближении. Чтобы узнать соблюдены ли требования ГОСТа относительно величин радиусов горизонтальных и вертикальных кривых, переносим значения перемещений всех узлов моделирующей конструкции в Microsoft Office Excel. Выполняем расчеты геометрических характеристик пространственной кривой трассы проектируемой автомобильной дороги. x Первое приближение x координати согнутой оси y z расчет крив изны проекции на плоскость ХОУ a 36 37 38 39 40 41 42 43 44 1079.966 1090.276 1100.718 1111.293 1122.002 1132.832 1143.771 1154.809 1165.934 -606.026 -611.714 -617.161 -622.35 -627.269 -631.928 -636.341 -640.521 -644.479 34.232 34.831 35.42 36 36.57 37.129 37.679 38.219 38.751 Окончательный вариант b 23.54843 23.55066 23.55502 23.56226 23.57258 23.58369 23.59721 23.60986 23.62132 c 11.77491 11.77495 11.77732 11.77949 11.7847 11.78962 11.7956 11.80296 11.80811 11.77495 11.77732 11.77949 11.7847 11.78962 11.7956 11.80296 11.80811 11.81428 p 23.54914 23.55146 23.55591 23.56323 23.57345 23.58446 23.59789 23.61046 23.62185 x R 533.8184 504.7004 477.9608 460.61 484.5496 516.9722 550.1731 584.6497 622.0005 координати согнутой оси y z расчет крив изны проекции на плоскость ХОУ a 36 37 38 39 40 41 42 43 44 1081.198 1091.941 1102.757 1113.646 1124.607 1135.635 1146.73 1157.886 1169.103 -607.884 -612.863 -617.686 -622.35 -626.853 -631.195 -635.379 -639.406 -643.276 34.268 34.839 35.416 36 36.593 37.193 37.799 38.407 39.017 b 23.67833 23.68269 23.68776 23.69507 23.70127 23.70907 23.71766 23.7258 23.73462 c 11.83823 11.84071 11.8426 11.84581 11.84992 11.85199 11.85769 11.86057 11.86583 11.84071 11.8426 11.84581 11.84992 11.85199 11.85769 11.86057 11.86583 11.86936 p 23.67864 23.683 23.68809 23.6954 23.70159 23.70938 23.71796 23.7261 23.73491 Рис. 3 Сравниваем величины радиусов проекций с нормативными и решаем, на какие участки модели следует добавить распределенную нагрузку для выравнивания изогнутой оси. Снова выполняем статический расчет моделирующей конструкции. После нескольких уточнений получаем пространственную кривую, величины радиусов кривизны которой находятся в нормативных пределах (рис. 3). Минимальное значение радиуса горизонтальной кривой в продольном профиле запроектированной дороги составляет 800м. Минимальные радиусы проекции на плоскость ХО вогнутой кривой – 3000м, выпуклой – 8000м. Для того чтобы показать, что полученная кривая трассы является плавной, были построены графики изменения радиусов кривизны горизонтальной и вертикальной проекций, уклонов, скорости изменения кривизны (рис. 4) Рис. 4 План и продольный профиль участка, запроектированного имитационным методом представлены на рис. 5, 6. Рис. 5 R 822.73 814.1958 801.9611 796.1277 805.4328 819.3444 835.1015 835.9616 854.776 Рис. 6 При проектировании участка автодороги Киев–Чоп км 375+371–км 349+822 применялись разные компьютерные программы. Предлагается объединить все расчеты в одном программном модуле, общая схема которого представлена на рис. 7. Блок-схема программного модуля Ввод данных: схема, категоия дороги, полоса варьирования трассы (задается в режиме диалога или графически) Присвоение значений величинам RY, Rz1, Rz2, I Создание основной модели: стержневая конструкция, нумерация узлов, приложение нагрузок Статический расчет геометрически нелинейной стержневой конструкции Добавление нагрузок по у на смежные с узлом е елементы Определение направления добавочных нагрузок Добавление нагрузок по z вверх на смежные с узлом е елементы R.XOY[e]<RY Расчет радиусов кривизны плана трассы Проверка соответствия нормативам R.XOY[e]>=RY R.XOZ1[e]<RZ1 Расчет радиусов кривизны профиля дороги Проверка соответствия нормативам Добавление нагрузок по z вниз на смежные с узлом е елементы Добавление нагрузок по z в узел е R.XOZ2[e]<RZ2 Определение направления добавочных нагрузок R.XOZ1[e]>=RZ1 R.XOZ2[e]>=RZ2 Yhul[e]>I Расчет уклонов в продольном профиле дороги Проверка соответствия нормативам Yhul[e]<=I Построение таблиц координат трассы, уклонов, радиусов Построение графиков координат трассы, уклонов, радиусов Проверка полученых данных на соответсвие нормативами и условиям участка проектирования Исходящие данные: .dxf файлы, .txt файлы Рис. 7 Построение плана и профиля дороги расчет рабочих отметок Редактирование данных в таблице координат Предложенный метод проектирования трассы автомобильной дороги дает возможность сразу получать плавную пространственную кривую трассы автомобильной дороги, которая проходит через определенные точки, имеет заданное направление, вписывается в рельеф, отвечает нормативным требованиям по критерию кривизны. Литература 1. Сорокин Ю.Г. Геометрическое моделирование трасс автомобильных дорог: Дисс. канд. техн. наук от 05.01.01. Днепропетровский инж.-строит. ин-т. Симферопольский филиал, Симферополь, 1989. 2. Вдовенко А.В., Кулиш В.И. Элементы дифференциальной геометрии трассы автомобильной дороги, изложенные методом подвижного репера. Хабаровск, ХГТУ, 2000. 3. Лобанов Е.М., Поспелов П.И., Величко Г.В., Филиппов В.В. Конструирование плавных автомобильных дорог с нелинейно меняющейся кривизной // Автомобильные дороги, 2002, №4, стр. 64–67. 4. Белятынский А.А., Чешуйко В.Н. Проектирование переходных кривых при реконструкции автомобильных дорог//Автоматизированные технологии изысканий и проектирования, 2007, №2(25), стр. 34–36. 5. Елугачев П.А. Опытное трассирование автомобильной дороги с использованием пространственных кривых Безье. Электронный научный журнал «Исследовано в России», 2006.