регулярные и хаотические движения частицы в прямоугольной
реклама

tEORETI^ESKAQ FIZIKA, 2, 2001 G.
45
regulqrnye i haoti~eskie dwiveniq
~asticy w prqmougolxnoj potencialxnoj
qme s kolebl`}ejsq stenkoj
a.a. bIR@KOW 1, r.a. bIR@KOW 2, b.w. dANIL@K 3
iSSLEDOWANA DINAMIKA ^ASTICY, DWIVU]EJSQ W PRQMOUGOLXNOJ BESKONE^NO
GLUBOKOJ POTENCIALXNOJ QME, ODNA IZ GRANIC KOTOROJ MOVET SOWERATX KOLEBATELXNYE DWIVENIQ. pOKAZANO, ^TO W ZAWISIMOSTI OT NA^ALXNYH USLOWIJ,
SOBSTWENNOJ ^ASTOTY KOLEBATELXNYH DWIVENIJ POTENCIALXNOJ STENKI W SISTEME WOZNIKAET DINAMI^ESKIJ HAOS ILI REGULQRNOE DWIVENIE. iSSLEDOWAN OBMEN
\NERGIEJ MEVDU ^ASTICEJ I KOLEBL@]EJSQ STENKOJ. pRI REGULQRNOM DWIVENII
NABL@DAETSQ MAKSIMALXNOE POGLO]ENIE \NERGII.
iSSLEDOWANIE GAMILXTONOWYH SISTEM S NELINEJNYM WZAIMODEJSTWIEM POKAZYWAET,
^TO ONI MOGUT SOWERATX KAK REGULQRNYE DWIVENIQ, TAK I DWIVENIQ, NAZYWAEMYE
DINAMI^ESKIM HAOSOM 1 { 7]. oDNIM IZ NAIBOLEE INTERESNYH REZULXTATOW \TIH ISSLEDOWANIJ QWLQETSQ USTANOWLENIE USLOWIJ, PRI KOTORYH MENQETSQ REVIM DWIVENIQ
SISTEMY, T.E.REGULQRNOE DWIVENIE SMENQETSQ DINAMI^ESKIM HAOSOM. w DANNOJ RABOTE
PREDLAGAETSQ ISSLEDOWATX SISTEMU, KOTORAQ SOSTOIT IZ NELINEJNO WZAIMODEJSTWU@]IH ^ASTICY I GARMONI^ESKOGO OSCILLQTORA, PRI^EM OBLASTX DWIVENIQ ^ASTICY
OGRANI^IWAETSQ BESKONE^NO WYSOKOJ POTENCIALXNOJ STENKOJ. sTRUKTURA WZAIMODEJSTWIJ TAKOWA, ^TO WZAIMODEJSTWIQ ^ASTICY S POTENCIALXNOJ STENKOJ I GARMONI^ESKIM OSCILLQTOROM MOVNO RASSMATRIWATX KAK ABSOL@TNO UPRUGIE STOLKNOWENIQ. pRI
\TOM PRODOLVITELXNOSTX KAVDOGO STOLKNOWENIQ NAMNOGO MENXE WREMENI DWIVENIQ
^ASTICY I OSCILLQTORA MEVDU \TIMI STOLKNOWENIQMI. sPECIFIKA WWEDENNYH NELINEJNYH WZAIMODEJSTWIJ POZWOLQET POSTROITX ZAMKNUTU@ SISTEMU URAWNENIJ, ODNOZNA^NO OPREDELQ@]IH TRAEKTORII ^ASTICY I OSCILLQTORA W FAZOWOM PROSTRANSTWE.
pOLU^ENNAQ SISTEMA URAWNENIJ DAET WOZMOVNOSTX ISSLEDOWATX SWOJSTWA TRAEKTORIJ
W ZAWISIMOSTI OT NA^ALXNYH USLOWIJ, SOOTNOENIQ MASS ^ASTICY I GARMONI^ESKOGO
OSCILLQTORA, A TAKVE OT ^ASTOTY OSCILLQTORA. w ZAWISIMOSTI OT WYBORA UKAZANNYH PARAMETROW W SISTEME NABL@DA@TSQ KAK DINAMI^ESKIJ HAOS, TAK I REGULQRNYE
DWIVENIQ.
1. pOSTROIM MODELX IZU^AEMOJ SISTEMY.
rASSMATRIWAEMAQ SISTEMA OBLADAET DWUMQ STEPENQMI SWOBODY I SOSTOIT IZ DWUH
^ASTIC S MASSAMI m I M , DWIVU]IHSQ PO ODNOJ PRQMOJ, S KOTOROJ SOWME]ENA OSX x
NEKOTOROJ INERCIALXNOJ SISTEMY OTS^<TA.
~ASTICA S MASSOJ M QWLQETSQ ODNOMERNYM GARMONI^ESKIM OSCILLQTOROM S CIKLI^ESKOJ ^ASTOTOJ !, TO ESTX DWIVETSQ POD DEJSTWIEM WNENEJ KWAZIUPRUGOJ SILY,
NAPRAWLENNOJ WDOLX OSI x, S KO\FFICIENTOM VESTKOSTI k = M!2 . sOWME]AQ NA^ALO
1 bIR@KOW aLEKSANDR aLEKSANDROWI^ - KAFEDRA OB]EJ I TEORETI^ESKOJ FIZIKI sAMARSKOGO GOSUDARSTWENNOGO UNIWERSITETA
2 bIR@KOW rOMAN aLEKSANDROWI^ - KAFEDRA OPTIKI mOSKOWSKOGO GOSUDARSTWENNOGO UNIWERSITETA
3 dANIL@K bORIS wASILXEWI^ - KAFEDRA OB]EJ I TEORETI^ESKOJ FIZIKI sAMARSKOGO GOSUDARSTWENNOGO UNIWERSITETA.
46
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
SISTEMY OTS^ETA S POLOVENIEM RAWNOWESIQ ^ASTICY-OSCILLQTORA, MOVNO PREDSTAWITX E< POTENCIALXNU@ \NERGI@ WO WNENEM SILOWOM POLE W WIDE
2
2
U (X ) = M!
2 X
(1)
M
GDE X { KOORDINATA \TOJ ^ASTICY.
~ASTICA S MASSOJ m (NAZYWAEMAQ W DALXNEJEM ^ASTICEJ) DWIVETSQ WO WNENEM
POLE, IME@]EM FORMU BESKONE^NO WYSOKOJ POTENCIALXNOJ STENKI. pOTENCIALXNAQ
\NERGIQ \TOJ ^ASTICY IMEET WID
L ; x 0
U (L ; x) = 1
(2)
0 L ; x > 0
GDE x { KOORDINATA ^ASTICY, A L { KOORDINATA POTENCIALXNOJ STENKI (MY WYBIRAEM
L > 0). pOTENCIALXNAQ STENKA, O^EWIDNO, "NEPRONICAEMA" DLQ ^ASTICY I, SLEDOWATELXNO, OGRANI^IWAET E< PEREME]ENIE PO NAPRAWLENI@ OSI x.
~ASTICA I OSCILLQTOR WZAIMODEJSTWU@T MEVDU SOBOJ. bUDEM POLAGATX, ^TO POTENCIAL WZAIMODEJSTWIQ ^ASTICY S OSCILLQTOROM ZAWISIT OT RAZNOSTI IH KOORDINAT
I OPREDELQETSQ SOOTNOENIQMI
x ; X 0
U (x ; X ) = 1
(3)
0 x ; X > 0
TO ESTX OSCILLQTOR WYPOLNQET ROLX KOLEBL@]EJSQ BESKONE^NO WYSOKOJ POTENCIALXNOJ STENKI, OGRANI^IWA@]EJ PEREME]ENIE ^ASTICY W NAPRAWLENII, PROTIWOPOLOVNOM NAPRAWLENI@ OSI x.
sOGLASNO (2) I (3), ^ASTICA POSTOQNNO NAHODITSQ W PRQMOUGOLXNOJ POTENCIALXNOJ QME S BESKONE^NO WYSOKIMI STENKAMI, ODNA IZ KOTORYH NEPODWIVNA, A DRUGAQ
SOWERAET KOLEBATELXNYE DWIVENIQ. tAKIM OBRAZOM, KOORDINATA ^ASTICY x W L@BOJ MOMENT WREMENI UDOWLETWORQET USLOWI@
X x L:
(4)
fUNKCIQ gAMILXTONA DANNOJ SISTEMY IMEET WID
1 P 2 + M!2 X 2 + 1 p2 + U (L ; x) + U (x ; X )
H = 2M
(5)
2
2m
GDE x p m { KOORDINATA, PROEKCIQ NA OSX x IMPULXSA I MASSA ^ASTICY X P ! M
{ KOORDINATA,PROEKCIQ NA OSX x IMPULXSA, CIKLI^ESKAQ ^ASTOTA KOLEBANIJ I MASSA
GARMONI^ESKOGO OSCILLQTORA.
int
int
2. pOSTROIM URAWNENIQ, OPISYWA@]IE DWIVENIE ^ASTICY I GARMONI^ESKOGO OSCILLQTORA W FAZOWOM PROSTRANSTWE PEREMENNYH ^ASTICY x v = p=m I OSCILLQTORA
X V = P=M . kANONI^ESKIE URAWNENIQ DWIVENIQ ^ASTICY I OSCILLQTORA MOGUT BYTX
POLU^ENY IZ FUNKCII gAMILXTONA SISTEMY (5).
pRI INTEGRIROWANII DIFFERENCIALXNYH URAWNENIJ gAMILXTONA SISTEMY WOZNIKAET ZADA^A OPISANIQ WZAIMODEJSTWIQ ^ASTICY SO STENKOJ I OSCILLQTOROM W SOOTWETSTWII S POTENCIALAMI (2), (3). bUDEM OPISYWATX WZAIMODEJSTWIQ ^ASTICY SO STENKOJ
I OSCILLQTOROM KAK ABSOL@TNO UPRUGIE STOLKNOWENIQ, PRODOLVITELXNOSTX KOTORYH
PRENEBREVIMO MALA PO SRAWNENI@ S WREMENEM DWIVENIQ ^ASTICY MEVDU \TIMI WZAIMODEJSTWIQMI. pRI STOLKNOWENII ^ASTICY S POTENCIALXNOJ STENKOJ SKOROSTX ^ASTICY IZMENQET SWO< NAPRAWLENIE NA PROTIWOPOLOVNOE, A E< MODULX NE IZMENQETSQ. w
47
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
PROCESSE STOLKNOWENIQ ^ASTICY I OSCILLQTORA IH KOORDINATY SOHRANQ@T POSTOQNNYE I RAWNYE ZNA^ENIQ, A SKOROSTI MGNOWENNO IZMENQ@TSQ I PRINIMA@T KONE^NYE
ZNA^ENIQ, OPREDELQEMYE ZAKONAMI SOHRANENIQ POLNOGO IMPULXSA I POLNOJ KINETI^ESKOJ \NERGII SISTEMY. iZMENENIE SKOROSTI OSCILLQTORA PRI EGO STOLKNOWENII S
^ASTICEJ, W SWO@ O^EREDX, PRIWODIT K MGNOWENNOMU IZMENENI@ AMPLITUDY I FAZY
EGO KOLEBANIJ. pRI OPISANII UKAZANNYH PROCESSOW STOLKNOWENIQ MOVNO ISPOLXZOWATX TAKIE PONQTIQ, KAK MOMENT STOLKNOWENIQ ^ASTICY SO STENKOJ ILI OSCILLQTOROM
I KOORDINATA ^ASTICY I OSCILLQTORA W MOMENT IH STOLKNOWENIQ.
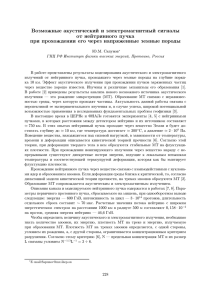
pREDLOVENNAQ DINAMI^ESKAQ SISTEMA MOVET BYTX NAGLQDNO PREDSTAWLENA MEHANI^ESKOJ MODELX@, KOTORAQ IZOBRAVENA NA RIS.1.
!q
0
rIS.1.
x
L
-
nr
x
0
x
rIS.2.
L
-
x
nEPODWIVNAQ STENKA IMEET KOORDINATU x = L. pODWIVNAQ STENKA SOWERAET KOLEBANIQ OKOLO TO^KI S KOORDINATOJ x = 0. oNA PREDSTAWLQET SOBOJ PRUVINNYJ MAQTNIK MASSOJ M I DWIVU]IJSQ BEZ TRENIQ. dLQ DEFORMACII PRUVINY SPRAWEDLIW
ZAKON gUKA, KO\FFICIENT UPRUGOSTI PRUVINY k = M!2, MASSU PRUVINY POLAGAEM
RAWNOJ NUL@. pOLOVENIE RAWNOWESIQ MAQTNIKA W TO^KE x = 0. ~ASTICA MASSOJ m
DWIVETSQ BEZ TRENIQ WDOLX OSI x, PRETERPEWAQ ABSOL@TNO UPRUGIE STOLKNOWENIQ SO
STENKOJ I PRUVINNYM MAQTNIKOM. pRODOLVITELXNOSTX STOLKNOWENIJ STOLX MALA PO
SRAWNENI@ SO WREMENEM DWIVENIQ ^ASTICY MEVDU NIMI, ^TO IM MOVNO PRENEBRE^X,
T.E. WZAIMODEJSTWIE MOVNO S^ITATX MGNOWENNYM.
dLQ ZAPISI URAWNENIJ TRAEKTORIJ PREDLOVENNOJ DINAMI^ESKOJ SISTEMY W FAZOWOM PROSTRANSTWE U^T<M, ^TO W SOOTWETSTWII S URAWNENIQMI DWIVENIQ gAMILXTONA
^ASTICA W PERIOD MEVDU L@BYMI POSLEDOWATELXNYMI STOLKNOWENIQMI SO STENKOJ
ILI OSCILLQTOROM DWIVETSQ S POSTOQNNOJ SKOROSTX@ ILI NAHODITSQ W SOSTOQNII
POKOQ, A OSCILLQTOR W PERIOD MEVDU STOLKNOWENIQMI S ^ASTICEJ SOWERAET GARMONI^ESKIE KOLEBANIQ S POSTOQNNOJ AMPLITUDOJ I NA^ALXNOJ FAZOJ ILI POKOITSQ W
SOBSTWENNOM POLOVENII RAWNOWESIQ. tAKIM OBRAZOM, TRAEKTORIQ OSCILLQTORA W FAZOWOM PROSTRANSTWE OPREDELQETSQ URAWNENIQMI:
(6)
X (t) = V 1 sin !(t ; t ) + X cos !(t ; t ) t t t +1
!
V (t) = V cos !(t ; t ) ; !X sin !(t ; t ) t t t +1 (7)
GDE t t +1 { MOMENTY n-GO I (n+1)-GO STOLKNOWENIQ OSCILLQTORA S ^ASTICEJ X KOORDINATA n-GO STOLKNOWENIQ OSCILLQTORA S ^ASTICEJ V - SKOROSTX OSCILLQTORA
W MOMENT ZAWERENIQ n-GO STOLKNOWENIQ S ^ASTICEJ.
tRAEKTORIQ ^ASTICY W FAZOWOM PROSTRANSTWE DLQ SLU^AQ, KOGDA MEVDU n-M I
(n+1)-M STOLKNOWENIQMI ^ASTICY S OSCILLQTOROM NE PROISHODIT E< STOLKNOWENIE SO
STENKOJ, OPREDELQETSQ URAWNENIQMI:
x(t) = x + v (t ; t ) PRI t < t < t +1 (8)
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
48
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
v(t) = v PRI t < t < t +1
(9)
GDE x = X - KOORDINATA n-GO STOLKNOWENIQ ^ASTICY I OSCILLQTORA v - SKOROSTX
^ASTICY POSLE n-GO STOLKNOWENIQ S OSCILLQTOROM.
dLQ SLU^AQ, KOGDA SKOROSTX v > 0 I ^ASTICA MEVDU n-M I (n+1)-M STOLKNOWENIQMI S OSCILLQTOROM WZAIMODEJSTWUET S POTENCIALXNOJ STENKOJ W MOMENT t
(t < t < t +1), URAWNENIQ DWIVENIQ ^ASTICY IME@T WID
v (t ; t ) PRI t t t x(t) = xL +
(10)
; v (t ; t ) PRI t t t +1 :
t <t<t v(t) = ;vv PRI
(11)
PRI t < t < t +1:
pRI \TOM MOMENT t OPREDELQETSQ USLOWIEM x(t ) = L, IZ KOTOROGO S U^<TOM (10)
SLEDUET, ^TO
t = t + L ;v x :
n
n
n
n
n
n
n
0
n
0
n
n
n
n
n
0
n
n
0
n
n
0
n
n
0
n
n
0
n
n
0
n
n
n
0
n
n
0
n
n
n
w MOMENTY WZAIMODEJSTWIQ ^ASTICA I PRUVINNYJ OSCILLQTOR OBMENIWA@TSQ
MEVDU SOBOJ \NERGIEJ PRI USLOWII, ^TO IH POLNAQ \NERGIQ, OPREDELQEMAQ NA^ALXNYMI USLOWIQMI, OSTAETSQ POSTOQNNOJ. zNA^ENIQ \NERGIJ ^ASTICY I OSCILLQTORA
MEVDU IH n-M I (n+1)-M WZAIMODEJSTWIQMI OPREDELQ@TSQ SOOTWETSTWENNO FORMULAMI
E^ (n) = 21 mv2 (12)
2
2 + m! X 2 V
(13)
E (n) = 12 m
2
GDE = m=M .
dLQ POSTROENIQ TRAEKTORIJ W SOOTWETSTWII S URAWNENIQMI (6) - (11) I WY^ISLENIQ \NERGIJ PO FORMULAM (12),(13) NEOBHODIMO ZNATX PARAMETRY STOLKNOWENIJ v ,
x , V , X , t , t PRI L@BOM n 1.
n
oc
n
n
n
n
n
n
n
0
n
3. pOSTROIM SISTEMU URAWNENIJ, NA OSNOWANII KOTORYH BUDEM NAHODITX PARAMETRY v , x , X , V , t , t .
dLQ WYWODA URAWNENIJ RASSMOTRIM IZMENENIE SKOROSTEJ ^ASTICY I OSCILLQTORA
W PROCESSE IH STOLKNOWENIQ. nA OSNOWANII ZAKONOW SOHRANENIQ POLNOGO IMPULXSA I
POLNOJ KINETI^ESKOJ \NERGII SISTEMY POLU^IM
(14)
v = 1 +2 V ; 11 ;
+ v n 1
; V + 2 v n 1
V = 11 +
(15)
1+
GDE v V { SKOROSTI ^ASTICY I OSCILLQTORA NEPOSREDSTWENNO PERED IH n { M STOLKNOWENIEM, A v V { POSLE n {GO STOLKNOWENIQ = m=M .
pROWED<M POSTROENIE ISKOMYH URAWNENIJ DLQ SLU^AQ, KOGDA ^ASTICA MEVDU E<
(n-1)-M I n-M STOLKNOWENIQMI S OSCILLQTOROM NE WZAIMODEJSTWUET S POTENCIALXNOJ
STENKOJ.
nAJDEM ZNA^ENIQ SKOROSTEJ v I V , ISPOLXZUQ URAWNENIQ DWIVENIQ (7), (9), W
KOTORYH NEOBHODIMO WYPOLNITX ZAMENU n ! (n ; 1) :
v = v 1
(16)
n
0
n
n
n
n
n
0
n
n
0
n
0
n
n
0
n
0
n
0
n
n
n
0
n
0
n
0
n
n;
49
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
V =V
1 cos !(tn ; tn;1) ; Xn;1! sin !(tn ; tn;1):
(17)
pODSTAWLQQ WYRAVENIQ (16), (17) W URAWNENIQ (14),(15) I U^ITYWAQ ZAKONY DWIVENIQ
(6) - (8), POLU^IM REKURRENTNYE SOOTNOENIQ, KOTORYE OPREDELQ@T ZNA^ENIQ v , V ,
x , X PO ZNA^ENIQM v 1, V 1, x 1, X 1 :
v = 1 +2 cos !(t ; t 1) V 1;
(18)
; 1 2+! sin !(t ; t 1) X 1 ; 11 +; v 1
cos !(t ; t ) V ;
V = 11 ;
1
1
+
(19)
; 11 ;+ ! sin !(t ; t 1) X 1 + 1 2+ v 1
X = V 1 !1 sin !(t ; t 1) + X 1 cos !(t ; t 1 )
(20)
x = x 1 + v 1(t ; t 1):
(21)
oDNAKO DLQ WY^ISLENIJ PO FORMULAM (18)-(21) NEOBHODIMO ZNATX INTERWAL WREMENI (t ; t 1) MEVDU (n ; 1)-M I n-M STOLKNOWENIQMI OSCILLQTORA I ^ASTICY.
uRAWNENIE DLQ OPREDELENIQ (t ; t 1) SOSTAWIM, ISPOLXZUQ USLOWIE SOWPADENIQ KOORDINAT ^ASTICY I OSCILLQTORA W MOMENT WZAIMODEJSTWIQ, T.E. X = x :
V 1 !1 sin !(t ; t 1) + X 1 cos !(t ; t 1) = x 1 + v 1(t ; t 1) (22)
GDE x 1 = X 1.
pOSTROENNAQ SISTEMA URAWNENIJ (18) { (22) POZWOLQET NAJTI PARAMETRY TRAEKTORIJ ^ASTICY I OSCILLQTORA NA WREMENNOM INTERWALE (t t +1), ESLI IZWESTNY
ANALOGI^NYE PARAMETRY DLQ INTERWALA (t 1 t ) (W MOMENT t 1, POSLE WZAIMODEJSTWIQ).
aNALOGI^NU@ SISTEMU URAWNENIJ MOVNO POSTROITX DLQ SLU^AQ, KOGDA SKOROSTX
^ASTICY POSLE WZAIMODEJSTWIQ S OSCILLQTOROM W MOMENT WREMENI t 1 IMEET POLOVITELXNOE ZNA^ENIE, TO ESTX v 1 > 0, I ^ASTICA MEVDU (n-1)-M I n-M STOLKNOWENIQMI S
OSCILLQTOROM WZAIMODEJSTWUET S POTENCIALXNOJ STENKOJ W NEKOTORYJ MOMENT WREMENI t (t 1 < t < t ). w \TOM SLU^AE DWIVENIE ^ASTICY OPISYWAETSQ URAWNENIQMI
(10) (POSLE ZAMENY n ! n ; 1), A v = ;v 1 . lEGKO POKAZATX, ^TO ISKOMAQ SISTEMA
URAWNENIJ IMEET WID:
v = 1 +2 cos !(t ; t 1) V 1;
; 1 2+! sin !(t ; t 1) X 1 + 11 +; v 1:
(23)
V = 11 ;
+ cos !(t ; t 1) V 1;
(24)
; 11 ;+ ! sin !(t ; t 1) X 1 ; 1 2+ v 1 0
n
n;
n
n
n
n;
n;
n;
n
n
n
n;
n
n;
n
n
n;
n;
n
n;
n;
n;
n;
n;
n;
n;
n;
n
n
n;
n;
n;
n
n;
n;
n
n;
n;
n;
n
n
n
n;
n
n;
n;
n;
n
n;
n;
n;
n
n
n
n;
n;
n
n;
n
n
n;
n;
n;
0
n
n;
0
n
n
0
n
n;
n
n
n
n;
n
X =V
n
n;
1
n;
n;
n;
n
n
n;
n;
n;
n;
n;
n;
1 ! sin !(tn ; tn;1) + Xn;1 cos !(tn ; tn;1 )
(25)
50
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
x = 2L ; x
n
1 ; vn;1(tn ; tn;1)
(26)
n;
V 1 !1 sin !(t ; t 1) + X 1 cos !(t ; t 1) =
= 2L ; x 1 ; v 1(t ; t 1 ) x 1 = X 1:
(27)
sISTEMA URAWNENIJ (18) { (27) ODNOZNA^NO OPREDELQET W MOMENT WREMENI t PARAMETRY SISTEMY x = X , v , V , ESLI ZADANY \TI PARAMETRY W PREDESTWU@]IJ
MOMENT WREMENI t 1. tAKIM OBRAZOM, ESLI ZADATX NA^ALXNYE USLOWIQ DLQ SISTEMY
W NEKIJ MOMENT WREMENI t0 , TO NA OSNOWANII URAWNENIJ (6) { (11), (18) { (27) MOVNO
n;
n
n;
n;
n;
n
n;
n
n;
n;
n;
n;
n
n
n
n
n
n;
POSTROITX TRAEKTORII ^ASTICY I OSCILLQTORA W FAZOWOM PROSTRANSTWE I RASS^ITATX
ZNA^ENIQ IH \NERGIJ PO FORMULAM (12) I (13).
nA^ALXNYE USLOWIQ DLQ SISTEMY ZADA@TSQ W NEKIJ MOMENT t0 PERED PERWYM WZAIMODEJSTWIEM MEVDU ^ASTICEJ I OSCILLQTOROM W WIDE
x(t0) = x0 X (t0 ) = X0 v(t0 ) = v0 V (t0 ) = V0 :
(28)
~EREZ INTERWAL WREMENI t0 = t1 ; t0 W MOMENT WREMENI t1 PROIZOJDET PERWOE WZAIMODEJSTWIE ^ASTIC, W REZULXTATE KOTOROGO KOORDINATY ^ASTIC I IH SKOROSTI PRIMUT
NOWYE ZNA^ENIQ:
x(t1 ) = X (t1 ) = x1 v(t1 ) = v1 V (t1) = V1 :
(29)
nE TERQQ OB]NOSTI, NO ZNA^ITELXNO UPRO]AQ DALXNEJIE WY^ISLENIQ, MY BUDEM ZADAWATX NA^ALXNYE USLOWIQ W MOMENT t0 , KOTORYJ BESKONE^NO BLIZOK K MOMENTU t1 , T.E.
t1 ; t0 = t10 = 0. |TO ZNA^IT, ^TO NA^ALXNYE USLOWIQ ZADA@TSQ W MOMENT NA^ALA
PERWOGO WZAIMODEJSTWIQ. pOSKOLXKU W NAEJ MODELI MY PRENEBREGAEM DLITELXNOSTX@ WZAIMODEJSTWIQ I S^ITAEM, ^TO W PROCESSE WZAIMODEJSTWIQ ^ASTICY NE MENQ@T
SWOEGO POLOVENIQ, A IZMENQ@T TOLXKO SWOI SKOROSTI, NA^ALXNYE USLOWIQ BUDEM ZADAWATX W WIDE
x1 = X1 = x0 v1 = v0 V1 = V0 (30)
GDE v1 , V1 { SKOROSTI ^ASTICY I OSCILLQTORA W NA^ALE PERWOGO WZAIMODEJSTWIQ x1
{ KOORDINATA TO^KI, W KOTOROJ PROISHODIT PERWOE WZAIMODEJSTWIE. zAMETIM, ^TO
SKOROSTX ^ASTICY v0 I SKOROSTX OSCILLQTORA V0 DOLVNY BYTX ZADANY TAK, ^TOBY
ONI OBQZATELXNO NA^ALI WZAIMODEJSTWOWATX, T.E. DOLVNO WYPOLNQTXSQ USLOWIE
V0 ; v0 > 0:
(31)
pOSLE PERWOGO STOLKNOWENIQ SKOROSTI ^ASTICY I OSCILLQTORA PRIMUT ZNA^ENIQ v1,
V1 , KOTORYE OPREDELQ@TSQ URAWNENIQMI (14),(15) PRI n=1 c U^ETOM (30):
v v1 = 1 +2 V0 ; 11 ;
(32)
+ 0
V + 2 v :
(33)
V1 = 11 ;
+ 0 1+ 0
nEOBHODIMO OTMETITX, ^TO NA^ALXNYE USLOWIQ W PREDLOVENNOJ MODELI NE MOGUT
BYTX ZADANY PROIZWOLXNYM OBRAZOM. dOPOLNITELXNO K NERAWENSTWU (31) NA ZNA^ENIQ
NA^ALXNYH SKOROSTEJ v0 , V0 I KOORDINATU x0 DOLVNY BYTX NALOVENY DOPOLNITELXNYE OGRANI^ENIQ, TAK KAK AMPLITUDA KOLEBANIJ OSCILLQTORA DOLVNA BYTX MENXE
0
0
0
0
51
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
L. |TO ZNA^IT, ^TO MAKSIMALXNAQ \NERGIQ KOLEBANIJ OSCILLQTORA Emax OPREDELQETSQ
WYRAVENIEM
2
2
(34)
Emax = M!
2 L :
wWEDEM OGRANI^ENIQ NA NA^ALXNYE USLOWIQ, ZADAWAEMYE W PREDLOVENNOJ MODELI.
w NA^ALXNYJ MOMENT WREMENI POLNAQ \NERGIQ E0 OSCILLQTORA I ^ASTICY OPRE-
DELQETSQ WYRAVENIEM
2
2 m 2
EO = M2 V02 + M!
(35)
2 X0 + 2 v0 :
w POSLEDU@]IE MOMENTY WREMENI ZNA^ENIQ V , X , v MOGUT BYTX RAZNYMI,
ODNAKO POLNAQ \NERGIQ OSCILLQTORA I ^ASTICY BUDET SOHRANQTX SWO< ZNA^ENIE E0
2
2 m 2
(36)
EO = M2 V 2 + M!
2 X +2v:
1
pOSKOLXKU AMPLITUDA KOLEBANIJ OSCILLQTORA A = (X 2 + ! 2V 2 ) 2 DOLVNA
BYTX WSEGDA MENXE L, POLNAQ \NERGIQ OSCILLQTORA I ^ASTICY DOLVNA UDOWLETWOn
n
n
n
n
n
n
n
;
;
RQTX NERAWENSTWU
M V 2 + M!2 X 2 + m v2 < M!2 L2 :
(37)
2 0
2 0 2 0
2
pOLU^ENNOE NERAWENSTWO (37) OPREDELQET DOPUSTIMYE INTERWALY ZNA^ENIJ DLQ x0,
v0, V0, ZADAWAEMYH W NA^ALXNYJ MOMENT WREMENI.
iZ (37) MOVNO POLU^ITX NERAWENSTWA DLQ NA^ALXNYH USLOWIJ:
;L < x0 < L
(38)
(39)
jv0 j < !L p1
PRI x0 = 0 V0 = 0
jV0j < !L
(40)
PRI x0 = 0 v0 = 0:
pOSTROENNYE NERAWENSTWA (31), (37) { (40) POMOGA@T WYBRATX NA^ALXNYE USLOWIQ,
PRI KOTORYH SISTEMA BUDET FUNKCIONIROWATX I OPISYWATXSQ URAWNENIQMI (28) {
(35). oDNAKO PRI PO\TAPNOM POSTROENII TRAEKTORIJ NEOBHODIMO U^ITYWATX, ^TO ESLI
W NEKIJ MOMENT WREMENI t WY^ISLENIQ PRIWODQT K TOMU, ^TO +L X ;L, TO
DALXNEJIE RAS^ETY PO PRIWEDENNYM FORMULAM NEOBHODIMO PREKRATITX, TAK KAK
n
n
PREDLOVENNYE URAWNENIQ NE U^ITYWA@T WOZMOVNOSTX WZAIMODEJSTWIQ OSCILLQTORA
SO STENKOJ.
dLQ POSTROENIQ TRAEKTORIJ ^ASTICY I OSCILLQTORA W FAZOWOM PROSTRANSTWE W
SOOTWETSTWII S URAWNENIQMI (6) { (11) NEOBHODIMO ZNATX MOMENTY WREMENI t . oPREDELIW IZ URAWNENIJ (22), (27) PROMEVUTOK WREMENI t 1 = t ; t 1, MOVNO NAJTI
MOMENTY WREMENI t PO FORMULE
X
t = t 1 + t1 :
(41)
n
nn;
n
n;
n
n
n
=2
nn;
n
w DALXNEJEM MY WYBEREM MOMENT WREMENI t1 W KA^ESTWE NA^ALA OTS^ETA WREMENI,
T.E. POLOVIM t1 = 0.
52
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
4. pREDLOVENNYE URAWNENIQ TRAEKTORIJ (6) { (11) I URAWNENIQ (18) { (27), (41),
OPREDELQ@]IE PARAMETRY TRAEKTORIJ, KAK DLQ TEORETI^ESKOGO ANALIZA, TAK I DLQ
KOMPX@TERNOGO MODELIROWANIQ, NEOBHODIMO PREDSTAWITX W BEZRAZMERNYH WELI^INAH.
w KA^ESTWE EDINIC IZMERENIQ, KAK POKAZYWA@T DALXNEJIE ISSLEDOWANIQ URAWNENIJ, UDOBNO WYBRATX SLEDU@]IE WELI^INY PREDLOVENNOJ MODELI:
1) L { EDINICA IZMERENIQ DLINY
2) T0 = L=V0 { EDINICA IZMERENIQ WREMENI, \TO WREMQ, ZA KOTOROE ^ASTICA SO
SKOROSTX@ V0 PROHODIT RASSTOQNIE L, PRI^EM V0 { W RQDE ZADA^ UDOBNO WYBRATX
KAK SKOROSTX DWIVENIQ GARMONI^ESKOGO OSCILLQTORA W MOMENT PERED PERWYM EGO
WZAIMODEJSTWIEM S ^ASTICEJ
3) V0 = L=T0 { EDINICA IZMERENIQ SKOROSTI
4) !0 = 2=T0 = 2V0 =L { EDINICA IZMERENIQ CIKLI^ESKOJ ^ASTOTY KOLEBANIJ
GARMONI^ESKOGO OSCILLQTORA
5) E0 = (1=2)mV02 { EDINICA IZMERENIQ \NERGII.
dLQ ZAPISI URAWNENIJ (6) { (13), (18) { (27), (31), (37) { (40) W BEZRAZMERNYH
WELI^INAH SDELAEM W NIH ZAMENU PEREMENNYH:
x = Lx~ t = T0 ! = !0 ` V = V0 V~ (42)
~ v = V0 v~
X = LX
GDE x~, , `, V~ , v~, X~ { SOOTWETSTWU@]IE BEZRAZMERNYE WELI^INY. w REZULXTATE TAKOJ
ZAMENY URAWNENIQ PRIMUT WID:
URAWNENIQ (6) { (7), OPREDELQ@]IE TRAEKTORII OSCILLQTORA W FAZOWOM PROSTRANSTWE:
~
X~ = 2V` sin 2`(
; ) + X~ cos 2`(
; )
(43)
V~ = V~ cos 2`(
; ) ; X~ 2` sin 2`(
; )
(44)
GDE < < +1 .
uRAWNENIQ (8), (9) OPREDELQ@]IE TRAEKTORII ^ASTICY W FAZOWOM PROSTRANSTWE
W SLU^AE, KOGDA ONA DWIVETSQ BEZ STOLKNOWENIQ SO STENKOJ NA WREMENNOM INTERWALE
< < +1 :
(45)
x~(
) = x~ + v~ (
; )
v~(
) = v~ (46)
GDE < < +1 .
uRAWNENIQ (10), (11), OPREDELQ@]IE TRAEKTORII ^ASTICY W FAZOWOM PROSTRANSTWE
W SLU^AE, KOGDA ONA W PROCESSE DWIVENIQ STALKIWAETSQ SO STENKOJ NA WREMENNOM
INTERWALE < < +1:
v~ (
; ) PRI < < x~(
) = x~ 1 +
(47)
; v~ (
; ) PRI < < +1 <
<
v~(
) = ;vv~~ PRI
(48)
PRI < < +1
GDE = + (1 ; x~ )~v 1 :
fORMULY (12), (13), OPREDELQ@]IE ZNA^ENIQ \NERGII ^ASTICY I OSCILLQTORA POSLE KAVDOGO WZAMODEJSTWIQ, PRINIMA@T WID:
E~^ (n) = v~2 (49)
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
0
n
n
n
n
0
n
n
n
0
n
n
0
n
n
0
n
;
n
n
n
0
n
n
53
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
)2 X~ 2 :
E~ (n) = 1 V~ 2 + (2l
(50)
rEKURRENTNYE SOOTNOENIQ (18) { (20) I TRANSCENDENTNOE URAWNENIE (22), OPREDELQ@]IE PARAMETRY TRAEKTORII OSCILLQTORA I ^ASTICY W SLU^AE, KOGDA ^ASTICA
NE STALKIWAETSQ SO STENKOJ NA WREMENNOM INTERWALE (
1 ), PRINIMA@T WID:
v~ = 1 +2 cos 2`(
; 1) V~ ;
1;
`)
~
; 2(2
(51)
1 + sin 2`(
; 1) X 1 ; 1 + v~ 1 ~
V~ = 11 ;
+ cos 2`(
; 1) V 1;
(52)
; 11 ;+ 2` sin 2`(
; 1) X~ 1 + 1 2+ v~ 1 X~ = 21` sin 2`(
; 1) V~ 1 + cos 2`(
; 1) X~ 1
(53)
PRI^<M X~ = x~ , X~ 1 = x~ 1.
uRAWNENIE (22) DLQ NAHOVDENIQ 1 = ; 1 PRINIMAET WID:
1 sin 2`
V~ 1 2`
1 + X~ 1 cos 2`
1=
= X 1 + v~ 1 1
(54)
dLQ SLU^AQ, KOGDA ^ASTICA POSLE (n ; 1)-GO WZAIMODEJSTWIQ S OSCILLQTOROM IMEET
SKOROSTX v 1 > 0 I W POSLEDU@]IJ MOMENT STALKIWAETSQ SO STENKOJ, URAWNENIQ
(18) { (20), (22) ZAMENQETSQ URAWNENIQMI (23) { (25), (27), KOTORYE W BEZRAZMERNYH
oc
n
n
n;
n
n
n
n;
n
n
n
n
n;
n;
n;
n;
n;
n
n;
n
n
n
n;
n
n;
n;
n;
n;
n
n;
n;
n;
nn;
n;
n
nn;
n;
n;
n;
n;
nn;
nn;
n;
WELI^INAH PRINIMA@T WID
v~ = 1 +2 cos 2`(
; 1) V~ ;
`)
1;
~
; 2(2
1 + sin 2`(
; 1) X 1 + 1 + v~ 1 cos 2`(
; ) V~ ;
V~ = 11 ;
1
1
+
; 11 ;+ 2` sin 2`(
; 1) X~ 1 ; 1 2+ v~ 1 X~ = 21` sin 2`(
; 1) V~ 1 + cos 2`(
; 1) X~
n
n
n
n;
n
n
n
V~
n;
n;
n;
n
n;
n
n
n;
n;
n;
n;
(56)
n;
n
n;
1
n;
(57)
1
1 2` sin 2`
nn;1 + X~n;1 cos 2`
nn;1 =
n;
(55)
n;
= 2 ; X~ 1 ; v~ 1
1:
o^EWIDNO, URAWNENIE (41) DLQ OPREDELENIQ PRI 1 = 0PRINIMAET WID:
X
= 1:
n;
n;
nn;
(58)
n
n
n
=2
n
nn;
(59)
54
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
pRI ISSLEDOWANII URAWNENIJ NEOBHODIMO POMNITX, ^TO WSEGDA n 1, 1 0 = 0
1 = 0.
nA^ALXNYE USLOWIQ DLQ URAWNENIJ (51) { (59) ZADA@TSQ W MOMENT 1 = 0,SOWPADA@]IJ
S NA^ALXNYM MOMENTOM PERWOGO STOLKNOWENIQ ^ASTICY S OSCILLQTOROM, W WIDE:
X~ (
1 ) = X~1 = x~(
1 ) = x~1 = x~0
(60)
v~(
1 ) = v~1 = v~0 V~ (
1 ) = V~1 = V~0
I DOLVNY UDOWLETWORQTX NERAWENSTWAM (31), (37) { (40), KOTORYE PRINIMA@T WID:
0
0
1 V~ 2 + (2`)2 x~2 + v~2 < (2`)2 :
0
0 0
(61)
;1 < x~0 < 1
(62)
jv~0 j < 2` p1
PRI x~0 = 0 V~0 = 0
(63)
jV~0j < 2`
(64)
PRI x~0 = 0 v~0 = 0
V~0 ; v~0 > 0:
(65)
pARAMETRY SISTEMY , ` DOLVNY BYTX ZADANY W SOOTWETSTWII S NERAWENSTWAMI
0 < < 1, 0 < ` < 1.
5. rASSMOTRIM PROCEDURU REENIQ SISTEMY URAWNENIJ (51) { (59) S NA^ALXNYMI
USLOWIQMI, ZADANNYMI W FORME (60) S U^ETOM NERAWENSTW (61) { (65), I POSTROENIE
TRAEKTORIJ OSCILLQTORA I ^ASTICY W FAZOWOM PROSTRANSTWE.
oPREDELIM PARAMETRY TRAEKTORIJ SISTEMY POSLE PERWOGO WZAIMODEJSTWIQ ^ASTICY I OSCILLQTORA W MOMENT 1 . pOSKOLXKU ^ASTICA DO PERWOGO WZAIMODEJSTWIQ
S OSCILLQTOROM NE SOUDARQLASX SO STENKOJ, TO MY DLQ OPREDELENIQ PARAMETROW
TRAEKTORIJ WOSPOLXZUEMSQ URAWNENIQMI (51) { (54). u^ITYWAQ W URAWNENIQH, ^TO
1 0 = 1 = 0, POLU^IM
v~ v~1 = 1 +2 V~0 ; 11 ;
(66)
+ 0
V~ + 2 v~ V~1 = 11 ;
(67)
+ 0 1+ 0
X~1 = x~1 = x~0:
(68)
dLQ OPREDELENIQ PARAMETROW TRAEKTORIJ POSLE WTOROGO WZAIMODEJSTWIQ, MY PREDPOLOVIM, ^TO ^ASTICA NE SOUDARQLASX SO STENKOJ, I PO\TOMU WOSPOLXZUEMSQ SISTEMOJ
URAWNENIJ (51) { (54). rEAQ TRANSCENDENTNOE URAWNENIE (54) PRI n = 2, NAJD<M
2 1 = 2 I WY^ISLIM PO REKURRENTNYM SOOTNOENIQM (51) { (53) ISKOMYE PARAMETRY W URAWNENIQH TRAEKTORIJ (43) { (48) PRI n = 2.
oDNAKO, ESLI TRANSCENDENTNOE URAWNENIE (54) NE IMEET REENIQ, TO \TO ZNA^IT,
^TO NAA GIPOTEZA O DWIVENII ^ASTICY BEZ STOLKNOWENIQ SO STENKOJ NA WREMENNOM
55
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
INTERWALE (
1 2) NE WERNA. w \TOM SLU^AE PEREHODIM K URAWNENIQM (55) { (58), KOTORYE U^ITYWA@T STOLKNOWENIE ^ASTICY SO STENKOJ. rEAQ TRANSCENDENTNOE URAWNENIE (58), PRI n = 2 NAHODIM 21 = 2 . rEKURRENTNYE SOOTNOENIQ (55) { (57)
POZWOLQ@T NAJTI PARAMETRY X~2 = x~2 , v~2 , V~2 . zATEM CIKL POWTORQETSQ, T.E. NAHODQTSQ 32 I PARAMETRY SISTEMY POSLE TRETXEGO WZAIMODEJSTWIQ I T.D.
wY^ISLENNYE PARAMETRY POZWOLQ@T POSTROITX TRAEKTORII PO FORMULAM (43) {
(48) I WY^ISLITX \NERGII ^ASTICY I OSCILLQTORA PO FORMULAM (49), (50).
pOSTROENIE TRAEKTORIJ W FAZOWOM PROSTRANSTWE ^ASTICY I OSCILLQTORA PRI PROIZWOLXNO ZADANNYH NA^ALXNYH USLOWIQH, UDOWLETWORQ@]IH NERAWENSTWAM (61) { (65),
I PROIZWOLXNYH ZNA^ENIQH PARAMETROW , ` WOZMOVNO TOLXKO NA OSNOWE METODOW ^ISLENNOGO MODELIROWANIQ. pOSTROENNYE TAKIM OBRAZOM TRAEKTORII IRREGULQRNO ZAPOLNQ@T FAZOWOE PROSTRANSTWO, T.E. W SISTEME NABL@DAETSQ DINAMI^ESKIJ HAOS.
sLEDUET ZAMETITX, ^TO W MOMENTY WZAIMODEJSTWIJ ^ASTICA I OSCILLQTOR OBMENIWA@TSQ MEVDU SOBOJ \NERGIEJ TAKIM OBRAZOM, ^TO IH POLNAQ \NERGIQ, OPREDELQEMAQ
NA^ALXNYMI USLOWIQMI, OSTAETSQ POSTOQNNOJ. pRI \TOM PEREDA^A \NERGII W RAZNYH
WZAIMODEJSTWIQH OSU]ESTWLQETSQ RAZNYMI PORCIQMI.
oDNAKO PRI OPREDELENNYH ZNA^ENIQH PARAMETROW , ` I NA^ALXNYH USLOWIJ x0,
v0, V0 W SISTEME WOZMOVNY REGULQRNYE PERIODI^ESKIE DWIVENIQ ^ASTICY I OSCILLQTORA. tAKIE DWIVENIQ SOWERA@TSQ, KOGDA PARAMETRY SISTEMY OPREDELQ@TSQ RAWENSTWAMI
= 1 ` = k2 PRI k = 1 2 : : :
(69)
A NA^ALXNYE USLOWIQ IME@T WID
x~0 = 0 v~0 = ;1 V~0 = +1:
(70)
nETRUDNO PROWERITX, ^TO PERIOD KOLEBANIJ ^ASTICY T^ = 1 = 2, A PERIOD
KOLEBANIJ OSCILLQTORA MOVET BYTX PREDSTAWLEN ODNIM IZ ^ISEL TOS = 1=` = 2=k
PRI k = 1 2 : : : T.E. OTNOENIE PERIODOW KOLEBANIJ OPREDELQETSQ FORMULOJ
nn;
T^
TOS = k PRI k = 1 2 : : ::
(71)
pOSLE KAVDOGO WZAIMODEJSTWIQ ^ASTICY I OSCILLQTORA ZNA^ENIQ PARAMETROW TRAEKTORII OSTA@TSQ NEIZMENNYMI:
x~ = 0 v~ = +1 V~ = ;1:
(72)
wY^ISLENIE \NERGIJ ^ASTICY I OSCILLQTORA SOOTWETSTWENNO PO FORMULAM (49) I
(50) POKAZYWAET, ^TO IH ZNA^ENIQ OSTA@TSQ POSTOQNNYMI:
E~^ (n) = E~OS (n) = 1:
(73)
|TOT REZULXTAT OZNA^AET, ^TO ^ASTICA I OSCILLQTOR NE OBMENIWA@TSQ \NERGIEJ
PRI WZAIMODEJSTWIQH.
n
n
n
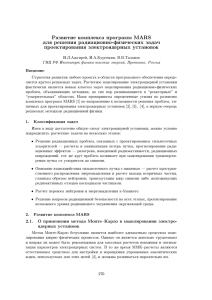
6. kAK ^ASTNYJ SLU^AJ RASSMOTRENNOJ WYE DINAMI^ESKOJ SISTEMY RASSMOTRIM
MODELX, W KOTOROJ M m, T.E. ! 0. w \TOJ MODELI WLIQNIE ^ASTICY NA OSCILLQTOR PRENEBREVITELXNO MALO, T.E. OSCILLQTOR SOHRANQET AMPLITUDU, ^ASTOTU I
NA^ALXNU@ FAZU KOLEBANIJ W PROCESSE WZAIMODEJSTWIQ S ^ASTICEJ. oDNAKO DWIVENIE
^ASTICY SU]ESTWENNO ZAWISIT OT PARAMETROW OSCILLQTORA.
w MEHANI^ESKOJ REALIZACII TAKOJ MODELI PREDPOLAGAETSQ, ^TO MASSIWNAQ ^ASTICA MASSOJ M SOWERAET KOLEBANIQ S POSTOQNNYMI AMPLITUDOJ I NA^ALXNOJ FAZOJ,
56
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
NESMOTRQ NA EE STOLKNOWENIQ S ^ASTICEJ MASSOJ m. kOLEBANIE MASSIWNOJ ^ASTICY W
\TOM SLU^AE MOVET BYTX OBUSLAWLENO NEKIM WNENIM DWIGATELEM, ^ASTOTU WRA]ENIQ
KOTOROGO MOVNO MENQTX (SM.RIS.2).
fORMALXNO W DANNOJ MODELI PREDSTAWLENO DWIVENIE ^ASTICY MASSOJ m W BESKONE^NO GLUBOKOJ POTENCIALXNOJ QME SO STENKOJ, KOLEBL@]EJSQ PO GARMONI^ESKOMU
ZAKONU I OPISYWAEMOJ URAWNENIQMI (43), (44) S ZADANNYMI ^ASTOTOJ ` I AMPLITUDAMI X , V =2`.
tRAEKTORIQ ^ASTICY W FAZOWOM PROSTRANSTWE OPISYWAETSQ URAWNENIQMI (45) {
(48). dLQ OPREDELENIQ PARAMETROW TRAEKTORII v , x , x +1 MY WOSPOLXZUEMSQ SISTEMOJ URAWNENIJ, POSTROENNOJ W PREDYDU]EJ MODELE, S USLOWIEM, ^TO = 0. sISTEMA
URAWNENIJ (51) { (58), OPREDELQ@]AQ PARAMETRY TRAEKTORII x~ , v~ , PREOBRAZUETSQ
K WIDU:
REKURRENTNYE SOOTNOENIQ (51) { (53) I TRANSCENDENTNOE URAWNENIE (54), OPREDELQ@]IE PARAMETRY TRAEKTORII OSCILLQTORA I ^ASTICY, KOGDA ONA NE STALKIWAETSQ
SO STENKOJ, PRINIMA@T WID:
v~ = 2 cos 2`(
; 1) V~ 1;
(74)
;4` sin 2`(
; 1) X~ 1 ; v~ 1
~V = cos 2`(
; 1) V~ 1 ;
;2` sin 2`(
; 1) X~ 1 (75)
1 sin 2`(
; ) V~ + cos 2`(
; ) X~ X~ = 2`
(76)
1
1
1
1
1 sin 2`
V~ 1 2`
1 + X~ 1 cos 2`
1=
= X 1 + v~ 1 1
(77)
GDE X~ = x~ , X~ 1 = x~ 1, 1 = ; 1.
dLQ SLU^AQ, KOGDA ^ASTICA POSLE WZAIMODEJSTWIQ S OSCILLQTOROM IMEET SKOROSTX
v > 0 I W POSLEDU@]IJ MOMENT STALKIWAETSQ SO STENKOJ, URAWNENIQ (55) { (58) W
BEZRAZMERNYH WELI^INAH PRINIMA@T WID:
v~ = 2 cos 2`(
; 1) V~ 1;
;4` sin 2`(
; 1) X~ 1 + v~ 1
(78)
V~ = cos 2`(
; 1) V~ 1 ;
;2` sin 2`(
; 1) X~ 1 (79)
1
X~ = 2` sin 2`(
; 1) V~ 1 + cos 2`(
; 1) X~ 1
(80)
1 sin 2`
V~ 1 2`
1 + X~ 1 cos 2`
1=
= 2 ; X~ 1 ; v~ 1
1
(81)
GDE 1 = ; 1, X~ = x~ , X~ 1 = x~ 1.
pRI ISSLEDOWANII URAWNENIJ NEOBHODIMO POMNITX, ^TO WSEGDA n 1, A 1 0 = 0:
nA^ALXNYE USLOWIQ DLQ URAWNENIJ (74) { (81) ZADA@TSQ W MOMENT 0 = 0 PERED
WZAIMODEJSTWIEM W WIDE:
X~ (
0 ) = x~(
0 ) = x0 = x1 v~(
0 ) = v~0 V~ (
0 ) = V~0
(82)
n
n
n
n
n
n
n
n
n
n;
n
n
n
n;
n
n;
n
n;
nn;
n;
n;
n
nn;
n;
n;
n;
n;
n;
n
n;
n;
n
n;
n;
n;
n;
n
n
n;
n;
nn;
nn;
n;
n
n
n
n
n
n
n
n;
n;
nn;
n;
nn;
n
n;
n
n
n;
n;
n;
n;
n;
n
n;
n
n;
n;
n;
n;
n;
n
n;
n;
n;
n;
nn;
nn;
n;
57
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
I DOLVNY UDOWLETWORQTX NERAWENSTWAM (61) { (65), KOTORYE PRINIMA@T WID:
1 V~ 2 + (~x )2 < 1
0
2` 0
;1 < x~0 < 1:
0 < jv~0j < 1
0 < jV~0j < 2`
V~0 ; v~0 > 0:
~ASTOTA KOLEBANIJ OSCILLQTORA DOLVNA BYTX ZADANA, O^EWIDNO,
0<`<1.
(83)
(84)
(85)
(86)
(87)
7. pROCEDURA REENIQ SISTEMY URAWNENIJ (74) { (81) S ZADANNYMI NA^ALXNYMI
USLOWIQMI (82) DLQ NAHOVDENIQ PARAMETROW TRAEKTORII ^ASTICY x~ , v~ TO^NO TAKAQ
VE, KAK I DLQ URAWNENIJ (51) { (58).
pOSTROENNYE TRAEKTORII ^ASTICY W FAZOWOM PROSTRANSTWE METODOM ^ISLENNOGO
INTEGRIROWANIQ URAWNENIJ (74) { (81) S PROIZWOLXNO WYBRANNYM PARAMETROM ` I
NA^ALXNYMI USLOWIQMI (82) { (87) IRREGULQRNO RASPREDELENY W FAZOWOM PROSTRANSTWE, T.E. NABL@DAETSQ DINAMI^ESKIJ HAOS. |NERGIQ ^ASTICY W REZULXTATE KAVDOGO
WZAIMODEJSTWIQ LIBO UWELI^IWAET, LIBO UMENXAET SWO@ WELI^INU.
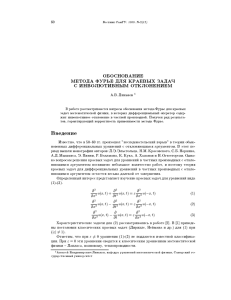
w KA^ESTWE PRIMERA NA RIS.3 IZOBRAVENA TRAEKTORIQ DWIVENIQ ^ASTICY, KOGDA ` = 1 7, NA^ALXNYE USLOWIQ WZQTY SO ZNA^ENIQMI: x~0 = 0, v~0 = 0, V~0 = 1, ^ISLO
STOLKNOWENIJ ^ASTICY I OSCILLQTORA N = 20. gRAFIK \NERGII ^ASTICY DLQ DANNOGO
SLU^AQ DWIVENIQ PREDSTAWLEN NA RIS.4. gRAFIK NAGLQDNO ILL@STRIRUET KOLEBANIQ
ZNA^ENIQ \NERGII. w PROCESSE DWIVENIQ ^ASTICA IMELA MAKSIMALXNOE ZNA^ENIE \NERGII E^ = 42, A MINIMALXNOE | E^ = 0.
pRIME^ATELXNO TO, ^TO ^ASTICA W DANNOJ SISTEME PRI OPREDELENNO WYBRANNYH
NA^ALXNYH USLOWIQH I ^ASTOTE KOLEBANIJ STENKI MOVET SOWERATX REGULQRNYE DWIVENIQ.
wYBEREM NA^ALXNYE USLOWIQ:
X~0 = x~0 = 0 v~0 = 0 V~0 = +1
(88)
A ^ASTOTU KOLEBANIJ STENKI BUDEM MENQTX OT WZAIMODEJSTWIQ K WZAIMODEJSTWI@ PO
ZAKONU
` = n ; 1 n 2:
(89)
fORMULA (89) OPREDELQET ^ASTOTU KOLEBANIJ OSCILLQTORA PERED n-M WZAIMODEJSTWIEM.
nAJDEM PARAMETRY, OPREDELQ@]IE TRAEKTORI@ ^ASTICY. pOSLE PERWOGO WZAIMODEJSTWIQ W SOOTWETSTWII S URAWNENIQMI IMEEM
v~1 = +2 V~1 = +1 X~1 = x~1 = 0:
(90)
o^EWIDNO, ^TO POSLE n-GO WZAIMODEJSTWIQ POLU^IM:
X~ = x~ = 0 v~ = +2n V~ = +1 1 = n ;1 1 :
n
n
n
n
n
nn;
n
58
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
~ASTICA DWIVETSQ PO SIMMETRI^NOJ TRAEKTORII POSLE KAVDOGO WZAIMODEJSTWIQ, ABSOL@TNAQ WELI^INA EE SKOROSTI WOZRASTAET NA 2 EDINICY, T.E. WOZRASTAET EE \NERGIQ
E^ = 4n2 :
(91)
gRAFIKI TRAEKTORIJ I ZAWISIMOSTI \NERGII OT n PREDSTAWLENY NA RIS.5, 6.
mOVNO WYBRATX PARAMETRY SISTEMY I NA^ALXNYE USLOWIQ TAK, ^TO ^ASTICA BUDET
IMETX SIMMETRI^NU@ TRAEKTORI@ W FAZOWOM PROSTRANSTWE, A EE \NERGIQ POSLE KAVDOGO WZAIMODEJSTWIQ S KOLEBL@]EJSQ STENKOJ BUDET UMENXATXSQ. dEJSTWITELXNO,
POLOVIM
X~1 = x~1 = 0 v~0 = ;N 1 V~0 = ;1 ` = N ; 2(2n ; 1) :
(92)
pOSLE PERWOGO WZAIMODEJSTWIQ NA OSNOWANII URAWNENIJ (74) { (77) IMEEM
x~1 = 0 v~1 = N ; 2 V~1 = ;1:
(93)
dALEE O^EWIDNO, ^TO POSLE L@BOGO n-GO WZAIMODEJSTWIQ BUDEM IMETX:
(94)
X~ = x~ = 0 v~ = N ; 2n V~ = ;1 1 = N ; 2(2n ; 1) :
|NERGIQ ^ASTICY POSLE n-GO WZAIMODEJSTWIQ OPREDELQETSQ WYRAVENIEM
E^ = (N ; 2n)2
(95)
T.E. \NERGIQ ^ASTICY UMENXAETSQ. pRIME^ATELXNO, ^TO ESLI N = 2N~ , GDE N~ { L@BOE
CELOE ^ISLO, TO \NERGIQ BUDET PRINIMATX ZNA^ENIQ:
E^ = 4(n ; N~ )2 = 4~n2
(96)
GDE n~ { CELOE ^ISLO. wYRAVENIE DLQ \NERGII (96) SOWPADAET S WYRAVENIEM (91), T.E.
\NERGIQ, SKA^KOM UMENXAQ POSLE KAVDOGO WZAIMODEJSTWIQ SWO@ WELI^INU, PRINIMAET TE VE ZNA^ENIQ, ^TO I W PREDYDU]EM SLU^AE, KOGDA ONA SKA^KOM WOZRASTALA.
n
n
n
n
nn;
8. tAKIM OBRAZOM, ISSLEDOWANIE DWIVENIQ ^ASTICY W POTENCIALXNOJ QME S KOLEBL@]EJSQ STENKOJ I WZAIMODEJSTWU@]EJ SO STENKOJ POSREDSTWOM ABSOL@TNO UPRUGOGO
STOLKNOWENIQ POKAZYWAET, ^TO NEOBHODIMO RAZLI^ATX DWA SLU^AQ.
w PERWOM SLU^AE KOLEBANIE STENKI S KONE^NOJ MASSOJ OBUSLAWLIWAETSQ NALI^IEM SILY, WOZWRA]A@]EJ EE W POLOVENIE RAWNOWESIQ (W MODELE ONA PRINIMAETSQ LINEJNOJ). w DWIVENII ^ASTICY NABL@DAETSQ DINAMI^ESKIJ HAOS, ODNAKO PRI OPREDELENNYH PARAMETRAH SISTEMY I NA^ALXNYH USLOWIQH ^ASTICA SOWERAET REGULQRNYE
DWIVENIQ. hARAKTERNOJ OSOBENNOSTX@ REGULQRNOGO DWIVENIQ QWLQETSQ OTSUTSTWIE
OBMENA \NERGIEJ MEVDU ^ASTICEJ I KOLEBL@]EJSQ STENKOJ.
wO WTOROM SLU^AE STENKA USTOJ^IWO KOLEBLETSQ PO GARMONI^ESKOMU ZAKONU, NE
IZMENQQ SWOEGO DWIVENIQ PRI WZAIMODEJSTWII S ^ASTICEJ. w \TOM SLU^AE TAK VE,
KAK I W PREDYDU]EM, W DWIVENII ^ASTICY NABL@DAETSQ DINAMI^ESKIJ HAOS I LIX
PRI OPREDELENNOM WYBORE PARAMETROW SISTEMY I NA^ALXNYH USLOWIJ ^ASTICA BUDET IMETX REGULQRNU@ TRAEKTORI@ W FAZOWOM PROSTRANSTWE. w DANNOM SLU^AE PRI
REGULQRNOM DWIVENII \NERGIQ ^ASTICY BUDET WOZRASTATX ILI UBYWATX (\TO OPREDELQETSQ NA^ALXNYMI USLOWIQMI) POSLE KAVDOGO AKTA WZAIMODEJSTWIQ S KOLEBL@]EJSQ
STENKOJ.
w ZAKL@^ENIE AWTORY WYRAVA@T BLAGODARNOSTX a.w. gOROHOWU ZA OBSUVDENIQ
RABOTY.
; ;
; ;
dWIVENIE ^ASTICY W POTENCIALXNOJ QME
rIS.3. tRAEKTORIQ ^ASTICY W rIS.4. zAWISIMOSTX \NERGII ^ASTICY
FAZOWOM PROSTRANSTWE v~(~x) PRI OT WREMENI PRI ` = 1 7, NA^ALXNYH
` = 1 7, NA^ALXNYH USLOWIQH x~0 = 0 USLOWIQH x~0 = 0 v~0 = 0, V~0 = 1.
v~0 = 0, V~0 = 1. ~ISLO
~ISLO WZAIMODEJSTWIJ n = 20
WZAIMODEJSTWIJ n = 20
rIS.5. tRAEKTORIQ ^ASTICY W
FAZOWOM PROSTRANSTWE v~(~x) PRI
` = n ; 1, NA^ALXNYH USLOWIQH
x~0 = 0 v~0 = 0, V~0 = 1. ~ISLO
WZAIMODEJSTWIJ n = 20
rIS.6. zAWISIMOSTX \NERGII ^ASTICY
OT WREMENI PRI ` = n ; 1, NA^ALXNYH
USLOWIQH x~0 = 0 v~0 = 0, V~0 = 1.
~ISLO WZAIMODEJSTWIJ n = 20
59
60
a.a. bIR@KOW r.a. bIR@KOW, b.w. dANIL@K
lITERATURA
1] zASLAWSKIJ g.m., sAGDEEW r.z. wWEDENIE W NELINEJNU@ FIZIKU: oT MAQTNIKA DO
TURBULENTNOSTI I HAOSA. m.: nAUKA, 1988. 368 S.
2] lIHTENBERG a., lIBERMAN m. rEGULQRNAQ I STOHASTI^ESKAQ DINAMIKA. m.: 1984.
3] {USTER g.g. dETERMINIROWANNYJ HAOS: wWEDENIE. m.: 1988. 240 c.
4] {UQN {. sTOHASTI^NOSTX W DINAMI^ESKIH SISTEMAH. dUBNA, 1986.
5] kOZLOW w.w., tRE]EW d.w. bILLIARDY. gENETI^ESKOE WWEDENIE W DINAMIKU SISTEM
S UDARAMI. m.: iZD-WO mgu, 1991.168 S.
6] bIR@KOW a.a., dANIL@K b.w., wOROBXEWA |.n. wESTNIK sofm{, 2. 1998.
7] bIR@KOW a.a., bONDARENKO w.w., wOROBXEWA |.n., dANIL@K b.w. wESTNIK
sofm{, 4. 2000.
8] bIR@KOW a.a., wOROBXEWA |.n., dANIL@K b.w., bONDARENKO w.w. tEORETI^ESKAQ
FIZIKA, 1, 2000.
Regular and chaotic motion of a particle in a square-wave potential pit with
vibrating wall
A.A.Biryukov, 4 R.A.Biryukov, 5, B.V.Danilyuk 6
The dynamics of a particle that moves in a rectangular potential pit of innite
depth with one oscillating border is explored. The possibility of the dynamical chaos
or regular motion, depending on the initial conditions and the eigenfrequency of
the potential wall's oscillation, is demonstrated. The energy exchange between the
particle and the oscillating wall is investigated. The maximum energy absorbtion is
observed in regular motion.
4 Alexander Alexandrovich Biryukov, Dep. of General and Theoretical Physics, Samara State
University, E-mail: biryukov@ssu.samara.ru
5 Roman Alexandrovich Biryukov, Dep. of General and Theoretical Physics, Samara State University
6 Boris Vasilievich Danilyuk, Dep. of General and Theoretical Physics, Samara State University