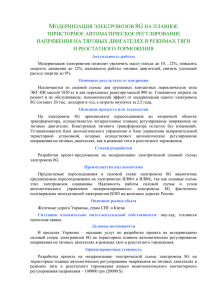
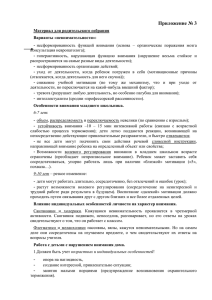
к вопросу оценки возможностей и эффективности различных
реклама

ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ УДК 622 – 628.28.83 К ВОПРОСУ ОЦЕНКИ ВОЗМОЖНОСТЕЙ И ЭФФЕКТИВНОСТИ РАЗЛИЧНЫХ ВИДОВ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ ПРОМЫШЛЕННЫХ ЭЛЕКТРОВОЗОВ Синчук О.Н., д.т.н., проф., Синчук И.О., к.т.н., Якимец С.Н., Ключка О.С., Губин И.В., маг. Кременчугский государственный университет имени Михаила Остроградского ул. Первомайская 20, г.Кременчуг, 39600 E-mail: seem@kdu.edu.ua Гузов Э.С., к.т.н., Каневский В.В., к.т.н., доц. Криворожский технический университет ул. XXII Партсъезда 11, г. Кривой Рог, 50000 Грудская В.П., к.т.н., доц. Национальный технический университет Украины ”Киевский политехнический университет” пр. Победы 37, 03056, м. Киев Приведен анализ эффективности использования разных видов электрического торможения тяговыми электроприводами рудничных электровозов. Доказана эффективность электродинамического торможения. Обоснован подход и приведены схемотехнические решения электроэнергоэффективных структур тяговых электроприводов. Ключевые слова: электровоз, электрическое торможение. Введение. Промышленный электровозный транспорт (ЭТ) потребляет 14 – 18% общего объема потребления электрической энергии горнометаллургическими предприятиями [1]. С целью повышения электроэнергоэффективности ЭТ в последние годы созданы, испытаны и внедрены на отечественных предприятиях опытные образцы новых тяговых электротехнических комплексов промышленных электровозов [1, 2]. Актуальность исследований. Внедрение в практику современных высокоэффективных систем тяговых электроприводов электровозов на основе IGBTпреобразователей электрической энергии не может быть решено с достаточным уровнем эффективности без ответа на вопрос: какой вид (способ) торможения необходимо применять? Цель работы. Обоснование возможностей применения тех или иных видов электрического торможения и разработка схемотехнических решений электроэнергоэффективных структур тяговых электроприводов промышленных двухосных рудничных электровозов средней мощности. Материал и результаты исследований. На промышленных электровозах основным видом торможения является электрическое, наряду с этим в электромеханическом комплексе функционирует пневматический и стояночный (ручной) механический тормоз. В тяговых электроприводах постоянного тока с тяговыми электродвигателями с последовательным возбуждением могут использоваться известные в общей теории электропривода виды электрического торможения: − электродинамическое; − противовключение; − рекуперативное. Во всех случаях тяговые двигатели работают в генераторном режиме за счет кинетической или потенциальной энергии движущегося электровозосостава. Вырабатываемая при этом электрическая энергия гасится в реостатах (электродинамическое торможение и противовключение) или поступает в контактную сеть (рекуперативное торможение). При электродинамическом торможении – основном виде торможения тягового электропривода в выпускае- мых отечественной промышленностью промышленных (рудничных) электровозах, тяговые двигатели отключаются от сети и замыкаются на тормозной резистор (он же и пусковой) сопротивлением rт . Напряжение на зажимах двигателя при тормозном токе I т электрической машины U т = I т rт определяет максимально возможную скорость электровоза, так как при реостатном торможении: U + I т rт E ωт = т = , (1) с еФ c eФ где: ω т – скорость вращения тягового электрического двигателя на момент начала торможения, рад/сек; U т – напряжение на зажимах тягового электрического двигателя, В; i т – ток тягового электрического двигателя, А; rт – тормозное сопротивление; се – конструкционная постоянная электрического двигателя; Ф – магнитный поток; E - ЭДС двигателя. Очевидно, при торможении на высокой скорости и с большим током, напряжение на зажимах двигателя сильно возрастает и может оказаться для него опасным, что, в свою очередь, диктует необходимость применения соответствующих ограничений. Рекуперативное торможение согласно [2]: Е −U і дв = , (2) rдв возможно только тогда, когда эдс электрической машины будет больше напряжения контактной сети, т.е. сеωФ > U . Но у двигателя последовательного возбуждения в двигательном режиме с ростом скорости уменьшается магнитный поток и он не может естественно перейти на работу в генераторный режим. Поэтому при рекуперативном торможении необходимо использовать независимое возбуждение обмоток ТЭД постоянного тока от специального генератора. Пределы регулирования скорости в этом случае задаются пределами регулирования тока возбуждения и допускаемым по условиям коммутации соотношением между МДС возбуждения и МДС реакции якоря. Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 2 51 ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ С точки зрения простоты схемотехнических решений ТЭП, электродинамический вид торможения выглядит предпочтительней рекуперативного. Однако, известный недостаток электродинамического торможения – неэкономичность, остается отрицательным его фактором и в тяговом его варианте. Гораздо экономичней и электроэнергоэффективней, на первый взгляд, выглядит рекуперативный вид торможения. Проанализируем этот вид торможения для конкретно реальных условий нынешних шахт и рудников на примере Криворожского железорудного комбината. Кинетическая энергия, запасенная движущейся массой электровозосостава, равна: m ⋅V 2 , Дж, (3) 2 m – масса состава, кг; V – скорость движения, W = где: м/с. При этом, как известно, массы и скорости движения различны для порожних и для груженых составов [3]. В железорудных шахтах для перевозки горной массы применяются электровозы типа К-14 и вагонетки ВГ-4, по 10 вагонеток в составе. Масса порожнего состава в таком случае равна mпор = ( P + Qпор )⋅ k j ⋅ 103 = ( 14 + 4,2 ⋅ 10) ⋅ 1,1⋅ 103 = 61,6 ⋅ 103 кг, (4) где: Р – масса электровоза 14 т; Qпор – масса 10 порожних вагонеток по 4,2 т; k j – коэффициент, учитывающий вращающиеся элементы, для порожнего состава 1,1, для груженого – 1,05. Масса груженого состава, при грузоподъемности вагонетки 10 т, составит: mгр = ( 14 + 4 ,2 ⋅ 10 + 10 ⋅ 10 ) ⋅ 1,05 ⋅ 103 = 163,8 ⋅ 103 кг. (5) Порожние электровозосоставы движутся на подъем, что способствует их торможению. По условиям ограничения тормозного пути до 40 м допускаются скорости движения до 20 км/ч или 5,55 м/с. В таком случае кинетическая энергия состава может достигать: m пор ⋅ Vпор 2 61,6 ⋅ 10 3 ⋅ 5 ,55 2 = 950 кДж.(6) 2 2 Груженые электровозосоставы движутся под уклон, что затрудняет их торможение. По условиям ограничения тормозного пути до 40 м допускаются скорости движения до 10 км/с или 2,78 м/с. Кинетическая энергия состава при этом достигает: Wпор = mгр ⋅ Vгр 2 = 163 ,8 ⋅ 10 ⋅ 2 ,78 = = 632 кДж. (7) 2 2 Как свидетельствуют исследования, при движении состава в течении рейса по главным откаточным выработкам требуется в среднем 1 торможение порожнего состава и 2 – груженого. Тогда энергия, которую требуется погасить при этом, будет равна: (8) 950 + 632 ⋅ 2 = 2214 кДж. Следует отметить, что реальные скорости движения меньше максимальных по условиям торможения, значительная часть кинетической энергии – около 20 % поглощается естественными сопротивлениями движению, опытные машинисты для снижения скорости используют выбег, особенно при движении с «порожняWгр = ком». Учитывая эти факторы, энергия, которую можно использовать для рекуперации, будет значительно меньше – не более: 2214 ⋅ 0 ,8 = 1771 кДж. (9) Затем эта энергия через механическую передачу, двигатель и преобразователь может быть отдана в сеть. Учитывая суммарный КПД этих устройств, равный 0,9, получим: 1771 ⋅ 0 ,9 = 1594 кДж или 0,44 кВт·ч. (10) То есть, согласно (10), в течении 1 рейса за счет рекуперации энергии торможения может быть отдано в сеть всего 0,44 кВт·ч. Учитывая, что в течении 1 рейса электровоз потребляет из сети около 18 кВт·ч, видим, что экономия электроэнергии составляет 2,4 %, т.е. эффективность рекуперации незначительна, что объясняется низкими скоростями движения, особенно груженых составов – до 10 км/ч. Кроме того, для реализации рекуперации энергии требуется существенное усложнение системы управления электровоза, а также обеспечение возможности потребления рекуперируемой энергии. Для иллюстрации сказанного рассмотрим схемы силовых цепей электровоза с возможностью рекуперации энергии торможения и без рекуперации – только с динамическим торможением. На рис. 1 приведена схема силовых цепей электровоза, позволяющая использовать как динамическое, так и рекуперативное торможение. Рекуперативное торможение осуществляется при включенном линейном контакторе на входе схемы, также постоянно включен тиристор тормозного режима VS3Q. Регулирование процесса рекуперативного торможения осуществляется силовыми транзисторами VT3E и VT4E путем широтно-импульсной модуляции так, чтобы ЭДС двигателей превышала напряжение в контактной сети. Подробное описание работы схемы во всех режимах приведено в [1]. 3 2 Рисунок 1 – Схема спаренного тягового электропривода с возможностью как динамического, так и рекуперативного торможения На рис. 2 приведена схема тягового электропривода рудничного электровоза, предусматривающая только электродинамическое торможение, что позволило существенно упростить схему. Как видно, количество управляемых силовых элементов уменьшено вдвое – 5 вместо 10, что весьма существенно упрощает как силовую, так и схему управления тягового привода электровоза. В двигательном режиме обеспечивается двухзонное регулирование напряжения на ТД путем регулирования VT1, VT2. Ослабление поля не используется, Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 2 52 ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ так как для рудничных электровозов нет нужды увеличивать скорость выше естественной характеристики ТД. Помимо этого данная система, в отличие от ряда других, содержит меньшее количество элементов. В тяговом режиме транзисторы ТQ1 и ТQ2 не задействованы и работа блоков протекает независимо друг от друга. В тормозном режиме в зоне высоких скоростей электровоза транзисторы ТQ1, 1ТМ1 и 2ТМ1 включены постоянно, ТQ2 отключен, а транзисторы 1ТМ2 и 2ТМ2 действуют в режиме широтноимпульсной модуляции. При включенных 1ТМ2 и 2ТМ2 токи протекают по цепям: Рисунок 2 – Схема тягового электропривода рудничного електровоза В тормозном режиме открывается тиристор VS4, переключающй схему в режим динамического торможения. В отличие от классической схемы перекрестного торможения, в данной схеме тормозное усилие каждого двигателя регулируется независимо, что позволяет получать более высокое суммарное тормозное усилие. На подземных рудниках с большой производительностью в добыче полезных ископаемых могут применяться электровозосоставы увеличенной массы путем применения спаренных электровозов или нескольких электровозов в составе, управляемых по системе многих единиц. С точки зрения оценки эффективности рекуперации энергии торможения это ничего не меняет. При увеличении массы составов соответственно снижается их количество и относительное значение экономии электроэнергии останется таким же, как и для одиночных электровозов, т.е. несущественным. Рисунок 3 – Принципиальная схема двухблочного совмещенного тягового электропривода В этом варианте применяется двухблочные варианты структур ТЭП [1, 2]. Авторами разработана и прошла предварительную апробацию в лабораторных условиях электроэнергоэффективная двухблочная структура ТЭП с IGBTпреобразователями для электровозов (рис. 3). Главным отличием данной структуры ТЭП является то, что она работает в одноблочном варианте (один электровоз в составе), легко конструируется в двухблочный (управление двумя электровозами в составе с управлением по системе многих единиц), что весьма важно для условий, когда необходимо быстрое перестраивание вариантов вождения электровозосоставов. При отключенных 1ТМ2 и 2ТМ2 обмотки возбуждения не шунтируются и токи в них увеличиваются. По мере снижения скорости Э.Д.С. двигателей стремится уменьшиться, во избежание чего для поддержания iQ сокращается импульс проводящего состояния транзисторов 1ТМ2 и 2ТМ2, что способствует увеличению токов возбуждения iE. При полностью отключенных 1ТМ2 и 2ТМ2 и дальнейшем снижении скорости, в работу вводится транзистор TQ2, действующий в импульсном режиме. Благодаря этому происходит импульсное подкорачивание тормозного резистора RQ, что ведет к поддержанию тормозного тока iQ на заданном уровне практически до полной остановки электровоза. Таким образом, из описания работы схемы (рис.3) следует, что чопперы 1 VМ2 – 2 VМ2 совмещают в себе функции регулирования тягового и тормозного токов, ослабление возбуждения и реверсирования направления тока возбуждения двигателей, что гарантирует минимум количества полупроводниковых приборов. В дополнение к целесообразности электродинамического торможения для рудничных контактных электровозов добавим следующее. Реостатное торможение имеет ряд ценных преимуществ, среди которых одним из главных следует считать малую зависимость от условий сцепления. В самом деле, если тормозной ток достиг очень большого значения и тормозное усилие двигателей превзошло силу сцепления, колеса должны застопориться. Остановка колес хотя бы на мгновение вызовет прекращение тока, ибо при неподвижном якоре ЭДС в нем наводиться не может. Прекращение тока будет соответствовать резкому уменьшению тормозного усилия, условия сцепления восстановятся автоматически, и процесс торможения будет продолжаться. Разумеется, переход за пределы сцепления все же нежелателен, так как переменное застопоривание и отпускание колес удлиняют тормозной путь. Кроме того, к преимуществам реостатного торможения можно отнести отсутствие износа колодок и удобство управления тормозом. Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 2 53 ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ Для каждого двигателя имеется определенная скорость вращения, ниже которой он не может самовозбудиться. Для тяговых двигателей рудничных электровозов она соответствует скорости движения 0,2 – 0,3 м/с. Если поезд находится на горизонтальной площадке или на подъеме, то практически торможение до такой скорости уже достаточно для полной остановки. На спуске для окончательной остановки придется применить механический тормоз. Второе обстоятельство, несколько снижающее ценность электрического торможения, как нормального рабочего, которое, во-первых, испытывают при торможении значительные динамические усилия, во-вторых, нагружаются током в течении добавочного промежутка времени сверх обычного режима, что ведет к дополнительному нагреву. При выборе двигателя, приспособленного для нормального рабочего реостатного торможения, мощность его приходиться выбирать на 15-20 % больше обычной и соответственно усиливать его механическую конструкцию, что и положено в основу разработки и выпуска современных ТЭД для промышленных электровозов [3]. Выводы. 1. Уровень эффективности рекуперативного торможения тяговых электроприводов промышленных (рудничных) электровозов, в отличие от магистральных электрифицированных видов транспорта, недостаточен для практической реализации этого вида торможения в подземных условиях эксплуатации. 2. Целесообразным видом электрического торможения для рудничных электровозов следует считать электродинамическое. 3. Предложен вариант двухблочной структуры тягового электропривода на перспективу модернизации ТЭП рудничных электровозов. В основу разработки этих схем положен принцип многофункциональности использования IGB-транзисторов, который позволил создать компактные схемы, содержащие минимальное количество IGBT и обеспечивающие наиболее высокий КПД установки. ЛИТЕРАТУРА 1. Синчук О.Н., Юрченко Н.Н., Чернышев И.О., Синчук И.О., Удовенко О.А., Пасько О.В., Гузов Э.С. Комбинаторика преобразователей напряжения современных тяговых электроприводов рудничных электровозов / Под ред. Синчука О.Н. – К.: ИЭД, 2006. – 250 с. 2. Синчук О.Н., Гузов Э.С., Луценко И.А., Афанасьев Е.В. и др. Опыт разработки и внедрения спаренных рудничных электровозов Изв. ВУЗов. Горный журнал. 3. Волотковский С.А. Рудничная электровозная тяга. 4-е изд. М.: Недра, – 1981. – 389 с. Статья пришла 27.04.10 г. Рекомендовано к печати д.т.н., проф. Черным А.П. ДО ПИТАННЯ ОЦІНКИ МОЖЛИВОСТЕЙ ТА ЕФЕКТИВНОСТІ РІЗНОМАНІТНИХ ВИДІВ ЕЛЕКТРИЧНОГО ГАЛЬМУВАННЯ ПРОМИСЛОВИХ ЕЛЕКТРОВОЗІВ Сінчук О.М., д.т.н., професор, Сінчук І.О., к.т.н., Якимець С.М., Ключка О.С., Губін І.В., маг. Кременчуцький державний університет імені Михайла Остроградського вул. Першотравнева 20, 39600, м. Кременчук E-mail: seem@kdu.edu.ua Гузов Е.С., к.т.н., Каневський В.В., к.т.н., доц. Криворізький технічний університет вул. XXII Партз’їзда 11, 50000, м. Кривий Ріг Грудська В.П., к.т.н., доц. Національний технічний університет України ”Київський політехнічний університет” пр. Перемоги 37, 03056, м. Київ Приведений аналіз ефективності використання різних видів електричного гальмування тяговими приводами рудничних електровозів. Доведена ефективність електродинамічного гальмування. Обґрунтовано підхід та приведені схемотехнічні рішення структур тягових електроприводів. Ключові слова: електровоз, електричне гальмування. TO THE QUESTION ESTIMATION POSSIBILITIES AND EFFICIENCY VARIOUS KINDS OF ELECTRIC BRAKING INDUSTRIAL ELECTRIC LOCOMOTIVES Sinchyk O., prof., Sinchyk I., Yakimec S., Klyuchka O., Gubin I. Kremenchuk Michaylo Ostrogradskiy state university Kremenchug, 39600, St. Pervomayskaya 20 E-mail: seem@kdu.edu.ua Guzov E., Kаnevskiy V. Technical University of Kriviy Rig Kriviy Rig, 50000, st. XXII Party Meeting, 11 Grudska V. National Technical University of Ukraine 'Kyiv Polytechnic Institute' The analysis of efficiency of the use of different types of the electric braking by the hauling electromechanics of mines electric locomotives is resulted. Efficiency of the electrodynamic braking is led to. The skhemotekhnycheskye decisions are resulted. Key words: electric locomotive, electric braking. Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 2 54