динамика - Волгодонский инженерно
реклама

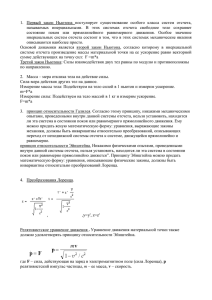
Министерство образования и науки Российской Федерации федеральное государственное автономное образовательное учреждение высшего профессионального образования Национальный исследовательский ядерный университет «МИФИ» Волгодонский инженерно-технический институт – филиал НИЯУ МИФИ ДИНАМИКА Индивидуальные контрольные задания по теоретической механике Учебно-методическое пособие УДК 531.22(076.5) Д 463 Рецензент – Синельщиков В.В. к.т.н., доцент Составители – Пинчук Э.В., Литвинова Т.А. Динамика [Текст]: Индивидуальные контрольные задания по теоретической механике: учебно-методическое пособие/Волгодонский инженерно-технический институт НИЯУ МИФИ. – Волгодонск: ВИТИ НИЯУ МИФИ, 2014. – 55с Методические указания предназначены для студентов всех форм обучения машиностроительных, строительных, энергетических и других специальностей, в учебные планы которых входит дисциплина «Теоретическая механика». Они содержат контрольные задания, краткие теоретические сведения, планы решения типовых задач, примеры решения. © ВИТИ НИЯУ МИФИ, 2014 Волгодонск 2014 2 1. Содержание дисциплины Оглавление 1. Содержание дисциплины 2. Контрольные задания 2.1 Содержание заданий 2.2 Задачи контрольных работ по динамике Д1, Д2, Д3, Д4, Д5, Д6 3. Методические указания к решению задач по динамике 3.1 Динамика точки 3.1.1 Дифференциальные уравнения движения материальной точки 3.1.2 Определение сил по заданному закону движения – Д1 3.2 Общие теоремы динамики системы 3.2.1 Теорема о движении центра масс – Д2 3.2.2 Теорема об изменении кинетического момента – Д3 3.2.3 Теорема об изменении кинетической энергии – Д4 3.3 Аналитическая механика 3.3.1 Принцип Далмбера – Д5 3.3.2 Общие уравнения динамики – Д6 3 4 6 6 6 18 18 18 19 21 21 30 36 44 44 50 Динамика 1 Введение в динамику: предмет динамики. Основные понятия и определения: масса, материальная точка, сила. Законы ГалилеяНьютона. 2 Динамика свободной и несвободной материально точки: Дифференциальные уравнения движения материальной точки. Две основные задачи динамики точки. 3 Относительное движение материальной точки: Дифференциальное уравнение относительного движения материальной точки. Переносная и кориолисова силы инерции. Принцип относительности классической механики. Случай относительного покоя. Инерциальные системы отсчета. 4 Введение в динамику механической системы: Механическая система. Масса системы. Центр масс системы и его координаты. Классификация сил, действующих на механическую систему. Равенство нулю главного вектора и главного момента внутренних сил механической системы. Моменты инерции системы относительно полюса, оси и плоскости. Радиус инерции. Теорема о моментах инерции относительно параллельных осей. Моменты инерции простейших однородных тел (тонкий стержень, прямоугольная пластина, круглый диск). 5 Теоремы о движении центра масс и об изменении количества движения системы: Дифференциальные уравнения движения механической системы. Теорема о движении центра масс. Количество движения материальной точки и механической системы. Элементарный и полный импульс силы. Теоремы об изменении количества движения точки и системы в дифференциальной и конечной формах. Законы сохранения количества движения. 6 Теоремы об изменении кинетического момента материальной точки и механической системы: Момент количества движения материальной точки относительно центра и оси. Теорема об изменении момента количества движения материальной точки. Кинетический момент механической системы относительно центра и оси. Кинетический момент вращающегося тела относительно оси вращения. Теорема об изменении кинетического момента и закон сохранения кинетического момента механической системы 4 относительно центра и оси. Дифференциальное уравнение вращения твердого тела вокруг неподвижной оси. Теорема об изменении кинетического момента механической системы в относительном движении по отношению к центру масс. Дифференциальные уравнения плоского движения тела. 7 Работа силы, кинетическая и потенциальная энергии: элементарная работа силы. Работа силы на конечном перемещении. Мощность. Работа силы тяжести, силы упругости и силы тяготения. Равенство нулю суммы работ внутренних сил в твердом теле. Кинетическая энергия точки и системы. Вычисление кинетической энергии системы (теорема Кенига). Кинетическая энергия тела при поступательном, вращательном и плоском движениях. Теорема об изменении кинетической энергии материальной точки и механической системы в дифференциальной и конечной формах. Понятие о силовом поле. Потенциальное силовое поле и силовая функция. Выражение проекций силы через силовую функцию. Поверхности равного уровня. Работа силы на конечном перемещении точки в потенциальном силовом поле. Потенциальная энергия. Примеры потенциальных силовых полей: однородное поле силы тяжести, силовое поле линейной силы упругости, силовое поле силы тяготения. Силовая функция и потенциальная энергия системы. Закон сохранения механической энергии. 8 Принцип Даламбера: Силы инерции материальной точки. Принцип Даламбера для материальной точки и механической системы. Приведение сил инерции механической системы к центру. Главный вектор и главный момент сил инерции. Силы инерции твердого тела в частных случаях его движения. 9 Аналитическая механика: связи и их классификация: голономные и неголономные; стационарные и нестационарные; двухсторонние и односторонние. Возможные перемещения. Число степеней свободы. Идеальные связи. Принцип возможных перемещений. Обобщенные координаты системы. Обобщенные силы и способы их вычисления. Случай сил, имеющих потенциал. Условия равновесия системы в обобщенных силах. Условия равновесия системы, находящейся под действием потенциальных сил. Общее уравнение динамики. Уравнения Лагранжа второго рода. Уравнения Лагранжа второго рода в случае потенциальных сил. Циклические интегралы. 5 2 Контрольные задания 2.1 Содержание заданий Студенты, обучающиеся по учебным планам по направлению: 150700 «Машиностроение», 270800 «Строительство», 271101 «Строительство уникальных зданий и сооружений» , 141100 «Энергетическое машиностроение» выполняют одно индивидуальное задания № 2 в третьем семестре. ИДЗ №2 включает задачи: Д1, Д2, Д3, Д4, Д5, Д6. Студенты, изучающие теоретическую механику в одном семестре выполняют одно ИДЗ. В разделе динамика оно включает задачи Д1,Д3,Д4. К каждой задаче дается 10 рисунков и таблица, содержащая 10 вариантов данных. Студент во всех задачах выбирает номер рисунка по последней цифре шифра (номера зачетной книжки), а номер варианта данных в таблице – по предпоследней. Каждая задача выполняется на листах формата А4 с одной стороны. Вверху указывается номер задачи и тема, далее записываются данные из таблицы и делается чертеж. Чертеж выполняется линейкой и циркулем, основные линии должны быть в два раза толще вспомогательных. На чертеже все углы должны соответствовать условию, размеры выполняются пропорционально данным. Слева оставляются поля – 20 мм. Решение задач необходимо сопровождать краткими пояснениями. 2.2 Задачи контрольных работ по динамике Задача Д1. Первая задача динамики. Материальная точка массы m = 0.2 кг движется согласно уравнениям x = x(t), y = y(t); (x, y – в метрах, t – в секундах). Определить силу F под действием которой происходит движение. Уравнение движения x(t) и время t1 заданы в таблице 1, а уравнение y(t) на рисунке 1. 6 Таблица 1 - К задаче Д1 Номер варианта данных Уравнение движения x = x(t), м 0 1 2 3 4 5 6 7 8 9 t2- 2 4 +2t2 2(t+1)2 2t + 3t3 t3-t2 3t4-t 4t + t2 2t3 (t+1)3 t2+2t3 Время t1, c 1 2 2 1 1 2 2 1 1 2 0 П y = 4 − 9 cos t 6 5 П y = −10 cos t 6 1 П y = −4 cos t 3 П y = 10 sin t 6 6 3 П y = 2 − 4 sin 6 8 П y = 3 − cos t 3 П y = 6 cos t 6 П y = 4 − 9 sin t 6 4 П y = 9 cos t 3 2 7 t 9 Задачи Д2. Теорема о движении центра масс. Механическая система (рис .2) состоит из грузов D и E массами m₁=4кг, m₂=6кг и плиты А массой m₃=10кг. Плита может перемещаться горизонтально. Грузы под действием внутренних сил начинают двигаться согласно уравнению s=f(t). Считая грузы материальными точками и пренебрегая силами сопротивления, определить в момент времени t1, перемещение плиты. В начальный момент система находится в покое. Данные приведены в таблице 2. Таблица 2 – К задаче Д2 № варианта S=f(t), м t1 , с 0 1 2 3 4 5 6 7 8 9 2t²+2 t²+2 3t²+2 t²+4 2t²+5 3t²+6 t²+8 4t²+1 5t²-1 4t²-2 1 2 2 1 1 1 2 1 2 2 П y = 8 cos t + 6 3 Рисунок 1 – Уравнение движения 7 8 0 1 2 5 6 Задача Д3.Теорема об изменении кинетического момента. Однородная пластина массой m₁=24кг вращается с постоянной угловой скоростью ω₀=6 рад/с вокруг вертикальной оси Z (рис. 3). В точке А желоба находится материальная точка массы m₂=6кг . В момент t₀=0 точка начинает двигаться по желобу по закону S=AD=f(t). Одновременно на пластину начинает действовать пара сил с моментом М. определить угловую скорость пластины в момент времени t₁=1с. Данные приведены в таблице 3, R=2м. Таблица 3 – К задаче Д3 2 7 3 8 4 9 № варианта S=f(t), м М, Н·м 0 1 2 3 4 5 6 7 8 9 2t²-1,2t t³ 0.8t² 2t-1,5t³ 2t³-t 0.5t² 0.6t³ t²-0.5t 1,5t²-t 2t²-t 3t² 5t 6t 2t² 8t 6t² 7t 2t4 5t² 9t² Рисунок 2 – К задаче Д2 9 10 0 5 y м x м 1 6 Задача Д4. Теорема об изменении кинетической энергии. Механическая система приходит в движение из состояния покой под действием сил тяжести и силы F(x)(рис.4). Определить скорость груза 1 в момент времени, когда его перемещение станет равным X=S1=0,4 м, если деформация пружины в момент начала движения механической системы равна нулю. Массы тел- m1, m2, m3; радиусы блоков и катков- R2, r2, R3, r3; радиусы инерции тел 2 и 3 – ρ2, ρ3; коэффициент трения скольжения- f; жесткость пружины- C заданы в таблице 4. Для тел 2 или 3 имеющих один радиус, берется большой. Таблица 4 – К задаче Д4 № m1 Варианта 2 m2 m3 R2 r2 R3 кг r3 ρ2 ρ3 f см c F Н/м Н 7 0 9 6 4 12 8 10 6 10 8 0,1 200 60(8+3x) 1 8 3 10 6 4 16 10 5 12 0,12 250 50(6+4x) 2 10 6 6 12 8 14 8 10 12 0,14 300 40(3+8x) 3 6 8 8 8 4 6 2 6 4 0,2 320 30(2+4x) 4 12 8 4 20 10 8 4 16 8 0,3 150 20(4+2) 5 10 12 8 12 6 8 4 10 6 0,15 200 60(7+4x) 6 8 10 8 16 8 10 6 14 8 0,18 120 80(5+8x) 7 6 12 4 14 10 8 4 12 6 0,2 180 90(4+6x) 8 10 14 12 16 12 14 8 14 10 0,1 240 50(3+4x) 9 8 10 6 16 8 12 6 10 10 0,3 140 60(4+2x) м м 3 8 м 4 9 м Рисунок 3 – К задаче Д3 11 12 0 Задача Д5. Принцип возможных перемещений. Вертикальный вал вращается вокруг оси Z с постоянной угловой скоростью 5 ω=10 (рис.5). К валу в точках С и Д прикреплены: невесомый стержень 1 длиной 1 =0,6 м на конце которого находится точечная масса =6 кг и однородный стержень 2 длиной = 0,8 м, массой m2= 10кг; оба стержня лежат в одной плоскости. Пренебрегая весом вала, определить реакции в точках А и B, принять АС= СD= DB=b=0,4 м, углы α и β приведены в таблице 5. 6 Таблица 5 - К задаче Д5 № Варианта 0 1 2 3 4 5 6 7 8 3 2 7 3 8 4 9 30 45 60 75 90 30 45 60 75 90 Рисунок 4 - К задаче Д4 13 14 45 60 75 30 60 45 30 75 60 45 0 1 2 3 Задача Д6. ,Общее уравнение динамики. Применяя общее уравнение динамики, определить ускорение груза 1 или центра катка 4, к которому приложена сила F и натяжение нити, прикрепленной к нему (рис. 6). Нити считаем невесомыми, нерастяжимыми, трением пренебрегаем. Система, состоящая из тел 1, 2, 3,4 массами m1, m2, m3, m4 движется из состояние покоя. К шкиву 2 или 3 приложена пара сил с моментом М, к телу 1 или 4 приложена постоянная сила F, каток 4 считать сплошным однородным цилиндром; ρ2, ρ3 – радиусы инерции тел 2, 3; R2, r2, R3, r3 – радиусы блоков и катков, f – коэффициент трения скольжения. Все данные приведены в таблице 6; для тел 2 или 3, имеющих один радиус, берется большой. 4 5 6 7 Таблица 6 № Варианта 0 1 2 3 4 5 6 7 8 9 8 9 - К задаче Д6 m1 m2 m3 m4 кг 8 2 10 6 14 4 10 4 16 6 10 8 12 10 8 4 8 6 4 6 8 8 10 16 8 10 12 20 14 12 6 10 6 10 6 12 10 12 12 10 R2 r2 12 10 10 18 20 12 16 14 10 12 6 8 6 10 18 10 12 12 6 6 Рисунок 5 – К задаче Д5 15 16 R3 r3 см 14 10 14 7 12 4 8 6 10 6 18 8 16 8 10 8 8 4 16 8 ρ2 ρ3 ƒ 10 9 8 10 16 10 14 13 8 10 10 10 4 7 8 14 10 8 6 12 0,1 0,12 0,14 0,2 0,16 0,18 0,12 0,1 0,2 0,12 M Н⋅м 0,6 1,2 0,8 0,6 0,9 0,7 1,2 1,3 1 0,8 F Н 450 460 470 480 300 320 340 360 280 290 3. Методические указания к решению задач по динамике 3.1 Динамика точки 3.1.1. Дифференциальные уравнения движения материальной точки В динамике изучается механическое движение материальных объектов под действием сил. Простейшим материальным объектом является материальная точка. В соответствии с основным законом динамики зависимость ускорения точки относительно инерциальной системы отсчета от действующей на нее силы и массы точки имеет вид [1] m⋅a = F , (1) действующая на точку сила, ускорение точки где относительно инерциальной системы отсчета, масса точки. Под инерциальной системой отсчета понимают систему отсчета, в которой справедливы аксиомы классической механики (аксиомы Ньютона). Основной инерциальной системой отсчета является гелиоцентрическая система [1]. В общем курсе дисциплины показано, что любая система отсчета, движущаяся по отношению к основной инерциальной системе поступательно, прямолинейно и равномерно, является также инерциальной. Согласно (1) можно записать m⋅g = P , где сила тяжести точки, ускорение свободного падения у поверхности Земли. Если на точку одновременно действует несколько сил, то справедливо основное уравнение динамики точки n m⋅a = ∑ Fk . (2) k =1 Рисунок 6 – К задаче Д6 17 Проецируя обе части уравнения (2) на оси декартовой системы координат, получаем дифференциальные уравнения движения материальной точки в декартовых координатах: 18 (3) координаты точки; проекции на оси где координат действующих на точку сил. Дифференциальные уравнения движения материальной точки в естественных осях: (4) дуговая координата и алгебраическая скорость где проекции действующих сил соответственно точки; на касательную, главную нормаль и бинормаль к траектории в рассматриваемом положении точки; радиус кривизны траектории. 3.1.2. Определение сил по заданному закону движения Определение действующей на материальную точку силы по заданному закону ее движения является первой основной задачей динамики точки. точки и закон её движения Пусть известны масса (уравнения движения) в декартовой системе координат Если закон движения точки задан в естественной форме, то известна траектория точки и уравнение движения имеет вид Для решения задачи в этом случае применяются дифференциальные уравнения движения точки в форме (4). План решения задач 1. Изобразить точку в текущий момент времени в выбранной системе координат и приложенные к ней активные силы. 2. Освободить точку от связей и заменить их действие реакциями связей. 3. Используя заданные уравнения движения составить дифференциальные уравнения движения материальной точки в выбранной системе отсчета. 4. Из полученной системы уравнений определить искомые величины. Пример к задаче Д1. Материальная точка массы m=0,1 кг π движется согласно уравнениям x=t2 , y= 2 cos t (x,y - метрах, t 3 секундах). Определить силу F, под действием которой происходит движение точки в момент t1 = 1 с. Решение. Определим координаты точки в момент t1: х = 1м; y= 2 cos Проекции на оси координат силы, действующей на точку, определяются из дифференциальных уравнений движения точки (3), т. е. 3 =1м (рис.7) Определим проекции скорости и ускорения на оси x и y dx dx 2 = 2t , 2 = 2 м / с 2 , dt dt dy 2π π =− sin t , dt 3 3 2 2 dy 2π π =− cos t . 2 dt 9 3 (5) Модуль силы и косинусы углов, образованных силой с осями координат, находятся по формулам: Рисунок 7 – К задаче Д1 19 π 20 В момент времени t=1c 2 2 dx dy = 2 м / с 2 , a y = 2 = −1,1м / с 2 . 2 dt dt Проекции силы на оси координат найдем уравнению (5): Fx=max=0,1·2=0,2H; Fy=may=-0,1·1,1=-0,11H. ax = 2 согласно 2 F = Fx + Fy = 0,22 + 0,112 = 0,228 H . 3.2 Общие теоремы динамики системы 3.2.1 Теорема о движении центра масс Координаты центра масс механической системы определяются по формулам: xc = 1 N 1 N 1 N m x y = m y z = , , ∑ k k c M∑ ∑mk zk , k k c M k =1 M k =1 k =1 N где mk– массы материальных точек системы; M = ∑ mk – масса k =1 План решения задач 1. Изобразить механическую систему в произвольный момент времени. 2. Показать на рисунке все внешние силы, действующие на систему. 3. Выбрать систему координат. 4. Составить дифференциальные уравнения движения центра масс (6). 5. В зависимости от условия задачи, используя полученные дифференциальные уравнения, решать первую, либо вторую основные задачи динамики [1]. Пример к задаче Д2. Тела 1 и 2 (рис. 8) движутся по отношению к телу 3 за счет внутренних сил данной механической системы. Тело 3 находится на горизонтальной плоскости. Массы тел 1 и 2 200 кг, 500 кг; масса тела 3 с находящимся на нем механизмом привода А 800 кг (центр масс С3 по отношению к телу 3 не ; 60º; 30º; коэффициент трения покоя перемещается); (сцепления) и трения скольжения , ; – непрерывная и возрастающая функция времени (ее производная также непрерывна и возрастает). Качение тела 2 происходит без проскальзывания; нити невесомы и нерастяжимы. системы; xk,yk,zk – координаты точек системы;N– число точек в системе. Теорема о движении центра масс механической системы имеет вид или в проекциях на оси декартовой системы координат: (6) где – ускорение центра масс; сил на оси координат. проекции внешних Рисунок 8 – К задаче Д 2 21 22 1. Считая горизонтальную плоскость гладкой, определить зависимость между перемещением тела 3 и относительным тела 1, если механическая система в перемещением начальный момент времени находилась в состоянии покоя, причем . Определить также величину одного из упоров, которые горизонтальной составляющей реакции удерживали бы тело 3 от перемещения. 2. Предполагая, что горизонтальная плоскость шероховата, составить дифференциальное уравнение движения тела 3. Определить условие, при котором тело 3 придет в движение, и найти зависимость и , считая, что дальнейшее движение происходит между при соблюдении этого условия (при ). Решение. 1. Предположим, что опорная горизонтальная плоскость является абсолютно гладкой. Рассмотрим механическую систему, состоящую из тел 1, 2, 3 и механизма привода А. Изобразим ее в произвольный момент времени (см. рис. 8). На рисунке показаны относительные перемещения и тел 1 и 2 и предполагаемое абсолютное тела 3 в сторону положительного отсчета перемещение (возрастания) этих перемещений. На систему действуют внешние , , тел и нормальная реакция N силы: силы тяжести горизонтальной плоскости. Составим дифференциальное уравнение движения центра масс механической системы в проекции на ось x: В данном случае (7) где M = m1 + m2 + m3 – масса всей системы. Проинтегрируем последовательно уравнение Получаем (7) два (9) Аналогично для начального момента рассматриваемого движения: (10) В выражении (9) (11) Здесь , , начальные значения абсцисс центров масс тел системы. В (11) выражено через . Для установления этой зависимости запишем связь между относительными скоростями и (см. рис. 8): т.е. Интегрируя последнее условиях, получаем: равенство при нулевых начальных раза. Произвольные постоянные интегрирования определяем из , . начальных условий: при Подставляя эти значения в выражение (2.4), получаем 23 , . Таким образом, для любого момента времени . (8) Из уравнений (8) следует, что центр масс механической системы в направлении оси х не перемещается и что движение тел 1 и 2 возможно только с одновременным движением тела 3. Запишем выражение для абсциссы центра масс системы в произвольный момент времени t: откуда Приравняв в соответствии с (8) выражения (9) и (10) с учетом (11), имеем 24 откуда определяем искомую зависимость Рисунок 9 – К задаче Д2 (12) Для определения величины составим дифференциальное уравнение движения центра масс системы в проекции на ось х: (13) или, используя числовые значения, Из этого равенства следует, что положительной координате тела 1 соответствует положительная координата , т.е. тело 3 перемещается из начального положения вправо, как и первоначально предполагалось. Очевидно, что зависимость между абсолютной скоростью тела 3 и относительной скоростью тела 1 определяется из (12) дифференцированием по времени, а именно Выразим проекцию ускорения центра масс системы на ось х через проекции ускорений центров масс тел системы. Для этого дважды продифференцируем по времени выражение: (14) Тогда, подставив (14) в (13), имеем (15) Производные получим из выражений (11), учитывая, – постоянные величины и (при что наличии упоров тело 3 перемещаться не будет). Таким образом, или . Пусть тело 3 удерживается на гладкой горизонтальной плоскости упорами (рис. 9). К ранее указанным внешним силам, действующим на реакции правого систему, добавим горизонтальную составляющую упора, на который будет опираться тело 3 при стремлении (согласно последнему выражению) двигаться в положительном направлении оси х, т.е. вправо. (16) Из уравнения (15) с учетом (16) находим (17) или Из выражения (17) следует, что правый упор будет испытывать горизонтальное давление тела 3 (а тело – реакцию Rx ) только тогда, когда тела 1 и 2 будут двигаться с ускорением, т.е. когда . При этом должно выполняться условие Если сочетание параметров системы будет таково, что , то, как это видно из (17), Rx = 0 даже когда . Ответ: 2. Будем считать, что горизонтальная плоскость шероховата. На рис. 10 показана рассматриваемая в данном случае механическая система в произвольный момент времени. На систему действуют силы тяжести тел , , , а также нормальная реакция и сила трения 25 26 (19) скольжения со стороны шероховатой горизонтальной плоскости, направленная противоположно скорости тела 3. Скорость тела 3, как было отмечено выше, направлена в положительном направлении оси x. Составим дифференциальное уравнение движения центра масс системы: Используя (14), получаем Запишем выражения для ординат центров масс тел системы: Здесь начальные значения ординат центров масс тел системы. Дважды дифференцируя эти выражения по времени, получаем: или, учитывая (11), (20) Из (19) с учетом (20) найдем величину реакции: (21) где величина силы тяжести всей системы. Используя выражение (18) и (21), запишем дифференциальное уравнени: Рисунок 10 – К задаче Д2. Отсюда получаем выражение для ускорения тела 3: Сила трения скольжения определяется по формуле (18) где – коэффициент трения скольжения, – нормальная реакция горизонтальной плоскости. Для нахождения величины составим из (6) дифференциальное уравнение движения центра масс системы в проекции на ось y: где G1,G2,G3 - величины сил тяжести тел 1, 2, 3. Аналогично (14) выразим проекцию ускорения центра масс системы на ось y через соответствующие проекции ускорений центров масс отдельных тел системы: Тогда дифференциальное уравнение (19) примет вид 27 (22) Из (22) определим условие, которому должно удовлетворять тела 1, при котором тело 3 придет в относительное ускорение движение. В самом деле, при движении тела 3 с ускорением должно быть . Тогда, учитывая выражение (22), получаем неравенство т.е. при возрастающей по условию функции Отсюда получаем условие 28 Таким образом, получаем зависимости: (23) Ответ: условию Движение тела 3 начинается из состояния покоя, когда действующая на него сила трения покоя (сцепления) принимает , поэтому в неравенстве (23) максимальное значение, т. е. следует заменить коэффициент трения скольжения f на коэффициент трения покоя (сцепления) . Имеем где Здесь Подставляя числовые исходные данные и сокращая числитель и знаменатель на 100, получаем = 0,46. Тогда величина при этом удовлетворяет 2 м/с . 3.2.2 Теорема об изменении кинетического момента Моментом количества движения (кинетическим моментом) материальной точки относительно некоторого центра называется вектор , равный векторному произведению: где радиус-вектор точки относительно центра O, m и v масса и скорость точки. Вектор аналогичен векторному моменту силы относительно . центра Кинетическим моментом механической системы относительно , равный сумме моментов количеств центра О называется вектор движения материальных точек системы относительно этого центра: равна где изменяется по некоторому Пусть относительное ускорение непрерывному закону так, что в любой момент времени . Движение тела 3 описывается дифференциальным уравнением (22), из которого с учетом введенных обозначений получаем – радиусы-векторы точек системы относительно центра О. Теорема об изменении кинетического момента механической системы: производная по времени от кинетического момента механической системы относительно неподвижного центра равна сумме векторных моментов всех действующих на систему внешних сил относительно этого же центра, т.е. (24) Проинтегрируем (24) при начальных условиях: t = 0, s1ro = s2ro = s3o = 0 s&1ro = s&2ro = s&3o = 0 или относительно осей неподвижном центре О: декартовых координат с началом в Имеем (25) Подставляя в эти выражения начальные условия, находим постоянные интегрирования: 29 где – кинетические моменты системы относительно неподвижных осей 30 координат х, y, z соответственно; – моменты внешних сил относительно осей х, y, z. Теорему об изменении кинетического момента механической системы относительно неподвижной оси удобно применять при рассмотрении движения системы, в состав которой входят твердые тела, вращающиеся вокруг этой оси. Кинетический момент твердого тела относительно неподвижной оси его вращения определяется следующим образом: 0 (26) где момент инерции тела относительно оси вращения z, угловая скорость тела. Осевые моменты инерции однородных пластинок приведены в табл. 7. План решения задач 1. Изобразить механическую систему в произвольный момент времени. 2. Показать на рисунке все внешние силы (активные и реакции связей), действующие на систему. 3. Выбрать систему координат, направив одну из осей вдоль неподвижной оси вращения тела. 4. Записать в общем виде уравнение теоремы об изменении кинетического момента системы относительно соответствующей неподвижной оси в форме (25). Таблица 7 - Осевые моменты инерции однородных пластинок Пластинка ½ пластинки 31 5. Записать выражение для суммы моментов внешних сил относительно этой оси (правая часть уравнения пункта 4). 6. Записать выражение для кинетического момента системы относительно выбранной неподвижной оси. 7. Подставить результаты пп. 5 и 6 в уравнение, записанное в п. 4. 8. Интегрируя полученное дифференциальное уравнение при заданных начальных условиях, найти искомую величину. Возможны два случая решения задач: а) если сумма моментов внешних сил относительно оси равна нулю, например, , то в соответствии с уравнением (2.27) и , т.е. кинетический момент системы относительно рассматриваемой оси сохраняется. Поэтому в этом случае следует приравнять кинетические моменты системы в начальный и конечный (произвольный) моменты времени, а затем из полученного уравнения определить неизвестную величину; б) если , то необходимо в соответствии с п. 8 проинтегрировать полученное дифференциальное уравнение. Пример к задаче Д3. Однородная горизонтальная прямоугольная платформа со сторонами 2l и м массой 18 кг вращается с рад/с вокруг вертикальной оси z (рис. 11). угловой скоростью В момент времени по желобу АВ платформы начинает 8 кг по двигаться (под действием внутренних сил) груз D массой 32 закону м, t – в секундах). Одновременно на платформу начинает действовать пара сил с моментом Н м. Пренебрегая массой вала, определить угловую скорость платформы . как функцию времени, т.е. В этом выражении момент М взят со знаком минус, так как он действует по часовой стрелке при наблюдении с положительного направления оси z. Подставляя (28) в (27), получаем Умножим обе части этого уравнения на и проинтегрируем: . (29) Для рассматриваемой механической системы (30) 2l где – кинетические моменты относительно оси z платформы и груза D соответственно. Платформа вращается вокруг неподвижной оси z. Поэтому . Значение момента инерции находим по теореме Гюйгенса-Штейнера: l – момент инерции относительно оси z' , параллельной Здесь оси z и проходящей через центр масс С платформы. Известно (см. табл. 7), что Рисунок 11 – К задаче Д3 Решение. Рассмотрим механическую систему, состоящую из платформы и груза D (см. рис. 11). На систему действуют внешние силы: силы тяжести ; силы реакции опор и пара сил с моментом М. Направим ось z по оси вращения платформы. Для определения ω применим теорему об изменении кинетического момента системы относительно оси z: (27) Так как силы параллельны оси z, а реакции пересекают её, то их моменты относительно оси z равны нулю. Тогда (28) 33 Тогда Следовательно, (31) При определении учтем, что груз D совершает сложное движение. Движение груза по платформе является относительным, а вращение платформы вокруг оси z – переносным. Тогда абсолютная скорость груза , где и – относительная и переносная скорости груза соответственно (рис. 12).Так как груз D движется по закону , то ; вектор направлен в сторону положительного отсчета расстояния . Далее, учитывая направление ; модуль . ω, изображаем вектор 34 20 − 3t 2 + 3,2t , рад/с; 0 ≤ t ≤ 0,79 с. Ответ: ω = 10 + 1,28t 4 + 1,6t 2 3.2.3. Теорема об изменении кинетической энергии Кинетической энергией материальной точки называется величина – масса точки; – скорость точки. Кинетическая энергия механической системы равна кинетических энергий всех материальных точек системы: где сумме Рисунок 12 – К задаче Д3 Тогда (32) Из рис. 12видно, что По теореме Кенига кинетическая энергия механической системы равна сумме кинетической энергии центра масс системы, если в нем сосредоточить всю ее массу и кинетической энергии системы в ее относительном движении по отношению к поступательно движущейся системе координат с началом в центре масс, т.е. Подставляя эту величину в выражение (32), получаем . (33) Учитывая выражения (31) и (33), в соответствии с (30) находим или, подставляя исходные числовые данные, Тогда уравнение (29) примет вид где Постоянную С1определяем из начальных условий: при t=0,ω=ω0 = 2 рад/с. Получаем С1 =20. Подставляя это значение в последнее выражение, окончательно находим ω=f(t) , т. е. 2 ω= Здесь – относительная скорость k-й материальной точки по отношению к центру масс. Кинетическая энергия твердого тела вычисляется по формулам: а) при поступательном движении 20 − 3t + 3,2t , при 0 ≤ t ≤ 0,79 с (движение груза D 10 + 1,28t 4 + 1,6t 2 – масса тела; – скорость любой точки тела. б) при вращении вокруг неподвижной оси – момент инерции тела относительно оси вращения z; ω – где угловая скорость тела. в) при плоском (плоскопараллельном) движении ограничено размерами платформы, т.е. s ≤ l/2=0,25 м). 35 36 где – масса тела; – скорость центра масс; – момент инерции тела относительно оси z, проходящей через его центр масс С перпендикулярно к плоскости движения; ω – угловая скорость тела. В случае плоского движения кинетическую энергию твердого тела можно также вычислить по формуле – момент инерции тела относительно оси P, проходящей через где его мгновенный центр скоростей перпендикулярно к плоскости движения. Теорема об изменении кинетической энергии механической системы в дифференциальной форме. Производная по времени от кинетической энергии механической системы равна сумме мощностей всех действующих на систему внешних и внутренних сил: Вычисление работы в частных случаях. 1. Работа силы тяжести: м/c2; h – перемещение в метрах центра где m – масса тела, кг; масс тела по вертикали. Работа положительна, если перемещение центра масс происходит вниз и отрицательна, если перемещение осуществляется вверх. 2. Работа линейной силы упругости: коэффициент жесткости, Н/м; и – абсолютные упругие где деформации в начальном и конечном положениях, м. 3. Работа сил, вращающих твердое тело вокруг неподвижной оси: (34) где мощности внешних и внутренних сил. Теорема об изменении кинетической энергии механической системы в конечной форме. Изменение кинетической энергии механической системы при ее перемещении равно сумме работ всех внешних и внутренних сил, действующих на систему, на этом перемещении: (35) , где – кинетическая энергия системы в начальном и конечном положениях. Для неизменяемой механической системы, состоящей из твердых тел, связанных между собой идеальными связями (гибкие нерастяжимые нити, шарниры без трения и т.д.), суммы мощностей и работ внутренних сил системы равны нулю, и выражения (34) и (35) принимают вид: главный момент сил относительно оси вращения z, Н·м; – где угол поворота тела, рад. Если . Вычисление мощности. 1. Мощность силы в общем случае: , где скорость точки приложения силы ; косинус угла ; проекции векторов на оси между векторами декартовой системы координат. 2. Мощность момента пары сил: где момент пары сил относительно оси вращения z, скорость тела. угловая План решения задач (36) . 37 1. Изобразить на рисунке механическую систему в её начальном и конечном положениях. 38 2. Показать все внешние и внутренние силы системы (в случае неизменяемой механической системы – только внешние силы). 3. Записать выражения для кинетической энергии системы в начальном и конечном положениях. 4. Вычислить сумму работ всех внешних и внутренних сил на перемещениях точек системы (в случае неизменяемой механической системы – только сумму работ внешних сил). 5. Используя результаты пп. 3 и 4, составить уравнение теоремы об изменении кинетической энергии системы в конечной форме в виде (35) или (36) и определить искомую величину (обычно скорость какойлибо точки системы). 6. Если необходимо найти ускорение какой- либо точки системы, то для этого можно воспользоваться теоремой в дифференциальной форме (35, первое уравнение 36) или продифференцировать по времени обе части уравнения теоремы в конечной форме, составленное в п.5 настоящего плана. Пример к задаче Д4. Механическая система (рис. 13) состоит из груза 1, ступенчатого шкива 2 с радиусами ступеней м, м и радиусом инерции относительно оси вращения м, блока 3, подвижного блока 4 и катка 5 радиуса м, катящегося по наклонной плоскости без скольжения. Тела 4 и 5 считать сплошными однородными цилиндрами. Коэффициент трения . Коэффициент трения качения скольжения груза 1 о плоскость катка 5 по плоскости см. Тела системы соединены между собой нерастяжимыми нитями, перекинутыми через блоки и намотанными на шкив 2; участки нитей параллельны соответствующим плоскостям. К катку 5 прикреплена пружина с Н/м. коэффициентом жесткости Под действием силы Н, зависящей от перемещения точки ее приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 2 действует постоянный момент Н·м сил сопротивления от трения в подшипниках. Определить скорость и ускорение груза 1 в момент времени, когда перемещение м, если массы тел равны: Рисунок 13 – К задаче Д4 Решение. Рассмотрим движение неизменяемой механической системы, состоящей их весомых тел 1, 2, 4, 5 и невесомого тела 3, соединенных нерастяжимыми нитями. На рис. 13 изображена система в произвольном (конечном) положении, в котором перемещение точки С4 (центра блока 4) приложения силы F равно некоторому значению . Начальное положение системы не изображено, так как последующее определение перемещений точек системы от него не зависит. Если геометрия механической системы такова, что определение перемещений точек системы зависит от ее начального положения, то это положение необходимо также изобразить на рисунке. Покажем на рисунке все действующие на систему внешние силы: , натяжение нити , сила трения , сила сцепления , момент сопротивления качению скольжения и момент . Для определения воспользуемся теоремой об изменении кинетической энергии системы в форме (36): (37) Так как в начальном положении система находилась в покое, то Т0 = 0. Кинетическая энергия Т системы в конечном положении равна сумме энергий всех ее тел: 39 40 (38) (42) . Кинетическая энергия блока 3 равна нулю, поскольку . Учитывая, что тело 1 движется поступательно, тело 2 вращается вокруг неподвижной оси, а тела 4 и 5 совершают плоское движение, получаем: Найдем сумму работ всех действующих внешних сил на перемещении системы, когда центр блока 4 пройдет путь . Работа силы равна (43) (39) Работа силы тяжести Выразим все входящие в выражения (39) скорости через искомую скорость груза 1. Из рис. 13 с учетом нерастяжимости нитей получим следующие кинематические зависимости: , где – любые точки на ободьях радиусов шкива 2, – – точка касания нити с блоком 4. Также заметим, что точки мгновенные центры скоростей блока 4 и катка 5. Тогда – , (44) . (45) где перемещение груза 1. Работа силы тяжести – Работа силы тяжести – (46) Работа силы трения скольжения Так как то . Из этих выражений получаем (47) Работа силы упругости (48) (40) Работа пары сил сопротивления вращению шкива 2 – где R4,R5 - радиусы блоков 4 и 5 (на рис. 13 не показаны). Кроме того, входящие в (39) моменты инерции имеют значения: . или с учетом исходных числовых данных 41 где угол поворота шкива 2. Работа пары сил сопротивления качению катка 5 – (41) Подставляя величины из выражений (40) и (41) в (39) и в соответствии с (38) получаем: (49) , (50) , где угол поворота катка 5. Работа остальных сил равна нулю, так как точки , в и Fсц5 – мгновенные центры которых приложены силы скоростей блока 4 и катка 5; точки приложения сил неподвижны, а реакция перпендикулярна скорости груза 1. 42 Выразим все линейные и угловые перемещения, входящие в выражения (43)–(50) через перемещение центра блока 4. Для этого воспользуемся зависимостями (40), из которых следует: . Кроме этого, скорость точки Учитывая, что (2.53) получаем конца пружины равна (рис. 13) Полагая в этом уравнении груза 1 при ускорение или, учитывая (51), , находим м, т. е. (52) . После интегрирования обеих частей равенств (51) и (52) получаем: (53) Тогда для суммы работ всех внешних сил на рассматриваемом перемещении системы с учетом выражений (43) – (50) и (53) получаем следующее выражение: или, произведя вычисления в соответствии с исходными числовыми данными, получаем . (54) Подставляя выражения (42) и (54) в уравнение теоремы (37) и учитывая, что , получаем (55) Из уравнения (55) находим скорость груза 1 при : м/c. груза 1 выразим из (53) : Для определения ускорения Ответ: 3.3Аналитическая механика 3.3.1 Принцип Даламбера Принцип Даламбера позволяет решать задачи динамики, применяя уравнения в форме условий равновесия статики. Принцип Даламбера для механической системы: при движении механической системы активные силы, реакции связей и силы инерции составляют равновесную систему сил. На практике при решении задач используются следствия: векторная сумма активных сил, реакций связей и сил инерции, а также сумма векторных моментов этих сил относительно любого центра O равны нулю, т. е. , где – активные силы и реакции связей; – силы инерции ( – массы и ускорения точек системы). Проецируя эти выражения на координатные оси, получаем шесть условий равновесия для вышеуказанных сил: Подставляя эту зависимость в уравнение (55), получаем (56) Продифференцируем обе части этого выражения по времени: 43 44 Для плоской произвольной системы сил рассматриваемые условия равновесия можно составить, например, в форме: (57) где A – произвольная точка плоскости действия сил. При составлении уравнений вида (56) или (57) для твердого тела необходимо предварительно силы инерции тела привести к какомулибо центру, например, к центру масс. Приведение сил инерции твердого тела к простейшему виду в частных случаях его движения При поступательном движении. Силы инерции приводятся к равнодействующей , приложенной в центре масс (М – масса тела, – ускорение центра масс). При вращении вокруг неподвижной оси. Если выбрать за центр приведения сил инерции точку O на оси вращения Oz, то в этой точке получим главный вектор и главный момент сил инерции: - кинетический момент тела относительно точки O. Если центр масс находится на оси вращения, то = 0 и силы инерции приводятся только к главному моменту. При этом: где – момент инерции тела относительно оси вращения Oz, – где угловое ускорение тела, оси Ox, Oy, Oz – неподвижные оси координат. Моменты сил инерции равны нулю, ось Oz является главной осью инерции для точки O. При плоском движении. Центр приведения сил инерции, как правило, выбирается в центре масс тела. В этом случае силы инерции и главному моменту приводятся к главному вектору . Здесь – кинетический момент тела в его относительном вращении вокруг центра масс. 45 Проекции на оси координат с началом в центре масс и движущиеся поступательно вместе с центром масс определяются по формулам: , где ось Cz перпендикулярна плоскости движения тела. Моменты сил инерции вычисляются так же, как и при вращении тела вокруг неподвижной оси. Они равны нулю, если ось Cz является главной осью инерции для точки C. Это, в частности выполняется, если тело имеет плоскость симметрии, проходящую через центр масс и параллельную плоскости движения тела. План решения задач 1. Выделить и изобразить механическую систему в текущий момент времени. 2. Изобразить активные силы, действующие на систему. 3. Освободить систему от связей и заменить их действие реакциями связей. 4. Приложить к точкам и телам системы силы инерции. 5. Выбрать систему координат и составить уравнения равновесия вида (3.1) или (3.2) для полученной системы сил. 6. Решить составленную систему уравнений и определить искомые величины. Пример к задаче Д5. Вертикальный вал, закрепленный подпятником A и подшипником E (рис. 14), вращается с постоянной угловой скоростью . Ломаный однородный стержень массой m = 10 кг и длиной ( = 0,2 м), состоящий из частей 1 и 2, прикреплен к валу цилиндрическим шарниром B и невесомым стержнем 3. Определить реакции шарнира B и стержня 3. Решение. Рассмотрим отдельно ломаный стержень (рис. 14). На него действуют активные силы тяжести составляющие частей 1 и 2, а также реакции шарнира B и реакция 46 стержня 3. Массы частей 1 и 2 однородного ломаного стержня пропорциональны их длинам (см. рис. 14) т.е. находящихся в их серединах). При этом, как и для любого элемента стержня, имеем: . Присоединим к действующим силам силы инерции бесконечно малых элементов стержня. Так как вал вращается равномерно ( ускорения , то элементы стержня имеют только нормальные , направленные к оси вращения (перпендикулярно ей) и , где равные по модулю Тогда силы инерции расстояние элемента от оси. Вычисляем равнодействующие будут направлены от оси вращения и равны по модулю , где масса элемента. пропорциональны , то эпюры этих параллельных Поскольку все сил образуют для части 1 треугольник, а для части 2 – прямоугольник. BL=6b и : . проходят через Линии действия равнодействующих центры тяжести соответствующих эпюр, т.е. треугольника и прямоугольника (см. рис. 14). Тогда . Выберем вращающиеся вместе с валом оси y и z так, чтобы стержень находился в координатной плоскости Byz (см. рис. 14). Согласно принципу Даламбера составим для полученной плоской системы сил три уравнения равновесия: (58) (59) (60) Из уравнения (60) находим или, подставляя числовые значения, получаем Рисунок 14 – К задаче Д5 Каждую из полученных систем параллельных сил инерции заменим ее равнодействующей, равной главному вектору этих сил, т. е. для части 1 равнодействующая ( и , а для части 2 ускорения центров масс частей стержня, 47 из уравнения (59) из уравнения (58) 48 Ответ: Из полученных уравнений находим искомые реакции . 3.3.2 Общее уравнение динамики Согласно общему уравнению динамики [1] в любой момент движения механической системы с идеальными связями сумма элементарных работ всех активных сил и сил инерции точек системы на любом ее возможном перемещении равна нулю: (61) где – активные силы, – силы инерции, – возможные перемещения точек приложения сил. Вычисление суммы элементарных работ сил инерции твердого тела на возможных перемещениях производится по формулам: Рисунок 15 – К задаче Д5. Приведем дополнительно схему определения реакций подпятника A и подшипника E. Для этого рассмотрим в целом вал с ломаным стержнем как одну механическую систему (рис. 15). шарнира B и стержня 3 для Тогда реакции рассматриваемой системы будут являться внутренними силами и при решении задачи учитываться не должны. Связями для системы в этом случае будут подпятник A и подшипник E, реакции которых дополнительно к ранее введеным заданным силам и силам инерции прикладываем в точках A и E. В соответствии с принципом Даламбера имеем: а) При поступательном движении: , равнодействующая сил инерции ускорение тела), возможное перемещение где ( любой точки тела. б) При вращении вокруг центральной неподвижной оси z: , где главный момент сил инерции относительно оси момент инерции тела относительно оси вращения, вращения, направлен противоположно угловое ускорение тела (момент угловому ускорению ), возможное угловое перемещение тела. в) При плоском движении: где главный вектор сил инерции, приложенный в масса тела; ускорение центра масс; центре масс тела; главный момент сил инерции относительно оси Cz, проходящей через центр масс тела перпендикулярно к плоскости движения; момент инерции тела относительно оси Cz; направлен противоположно угловое ускорение тела (момент 49 50 угловому ускорению ); возможное перемещение центра масс; возможное угловое перемещение тела. План решения задач 1. Изобразить на рисунке все активные силы, действующие на механическую систему. При наличии неидеальных связей добавить к активным силам соответствующие реакции (например, силы трения). 2. Определить и изобразить на рисунке главные векторы и главные моменты сил инерции масс системы. Дальнейший ход решения зависит от того, имеет система одну степень свободы или же несколько. А. Система имеет одну степень свободы. 3. Сообщить системе возможное перемещение, задав его одной из точек или одному из тел системы, и выразить возможные перемещения точек и тел приложения активных сил, сил инерции, а также моментов пар этих сил через введенное возможное перемещение. 4. Составить общее уравнение динамики (61). 5. Из полученного уравнения найти искомую величину. Б. Система имеет несколько степеней свободы. 4. Сообщить системе возможное перемещение в виде возможного перемещения одной из точек или одного из тел системы, соответствующее только одной из степеней свободы. Выразить возможные перемещения точек и тел приложения активных сил, сил инерции, а также моментов пар этих сил через это возможное перемещение. 5. Составить общее уравнение динамики (61). 6. Последовательно выполняя действия пп. 4 и 5 для каждого из независимых возможных перемещений системы, соответствующих всем степеням свободы, получить систему уравнений, число которых равно числу степеней свободы. 7. Решив систему составленных уравнений, определить искомые величины. 51 Пример к задаче Д6. Механическая система состоит из груза 1, шкива 2 и катка 3, соединенных между собой гибкими нерастяжимыми нитями (рис.16). Груз 1 скользит вниз по Причем наклонной шероховатой плоскости, шкив 2 вращается вокруг своей неподвижной оси, а каток 3 катится по горизонтальной плоскости без скольжения. Определить ускорение груза 1 и силу натяжения нити AB. Силы сопротивления в подшипниках не учитывать. Массами нитей пренебречь. Каток 3 считать однородным круглым диском; коэффициент трения скольжения; fk = 0,2см - коэффициент трения 0,1 м; радиус инерции качения; шкива 2 относительно своей оси вращения. Рисунок 16 – К задаче Д6 Решение. Рассматриваемая механическая система имеет одну степень свободы, так как положение шкива 2, заданное его углом поворота, однозначно определяет положения груза 1 и катка 3. Изобразим активные силы: силы тяжести груза 1, шкива 2 и катка 3 (см. рис.16). Наклонная шероховатая плоскость не является идеальной связью. Поэтому к указанным активным силам добавляем силу трения груза о наклонную плоскость, направленную вдоль этой плоскости вверх. По величине (62) . 52 Так как учитывается трение качения, то к активным силам добавляем также момент трения качения M k = f k N3 = f k P3 = 4 f k mg . (63) Момент направлен противоположно качению катка 3. Приложим силы инерции. Пусть груз 1 движется с искомым ускорением , направленным по его движению. Тогда сила инерции груза 1 выражается вектором Силы инерции шкива 2 приводятся к паре, величина момента которой (64) где момент инерции шкива угловое ускорение шкива. относительно оси вращения, Силы инерции катка 3, совершающего плоское движение, приводятся к приложенной в его центре масс силе ( ускорение центра масс катка 3) и к паре сил, момент которой равен (65) где момент инерции катка относительно своей оси, угловое ускорение катка. Сообщим системе возможное перемещение в направлении ее действительного движения, задав его поворотом шкива 2 на , при этом груз 1 получит возможное бесконечно малый угол перемещение , а каток 3 – перемещение центра масс и угловое перемещение (рис. 16). Составим общее уравнение динамики: (66) Зависимости между возможными перемещениями такие же, как и между соответствующими скоростями. Выразим скорости центров масс и угловые скорости тел системы шкива 2. Мгновенный центр скоростей через угловую скорость катка 3 находится в точке P касания катка с плоскостью. Тогда находим (67) 53 т.е. (68) Следовательно, зависимости между возможными перемещениями имеют вид: Подставим эти значения в уравнение (66). Сокращая на получаем P1r cos60o − Fтрr − М k − Ф1r − M 2(ф) − М 3( ф) − Ф3 3r = 0 . , (69) В соответствии с (67) и (68) выразим ускорения через искомое груза 1. Имеем ускорение (70) . Учитывая исходные данные, а также выражения (64), (65) и (70), получаем . После подстановки (62), (63) и последних выражений в уравнение (69) получаем Для определения силы натяжения нити AB мысленно отбросим нить и заменим её силой натяжения (рис. 17). Сообщим грузу возможное перемещение и составим общее уравнение динамики откуда Рисунок 17 – К задаче Д6 или 54 Очевидно, что этот же результат для силы натяжения можно получить с помощью принципа Даламбера. Ответ: ; Список литературы 1. Бутенин Н.В., Лунц Н. Л., Меркин Л. Р. Курс теоретической механики: Учебник, Спб «Лань», 2004 - 736 с. 2. Митюшов Е.А.. Берестова С.А. Теоретическая механика. М. «Академия», 2001, 318 с. 3. Тарг С.Н. краткий курс теоретической механики. М., «Наука». 2005. - 416 с. 4. Статика. Методические указания к выполнению индивидуальных домашних заданий по теоретической механике. Составители: В.А. Нарыжный. С.Ф. Годунов. Новочеркасск, РИО ЮРГТУ, 2004, 30 с. 5. Кинематика. Методические указания к выполнению индивидуальных домашних заданий по теоретической механике. Составители: В.А. Нарыжный. С.Ф. Годунов. Новочеркасск, РИО ЮРГТУ, 2007, 50 с. 6. Нарыжный В.А. Динамика. Учебное пособие по теоретической механике. - М.: НИЯУ МИФИ, 2012. - 168 с. 7. Бать М.И. и др. Теоретическая механика в примерах и задачах: Учебное пособие, Спб «Лань», 2010. 8. Программное обеспечение и Интернет-ресурсы: www.teoretmex.ru. 55 Динамика Индивидуальные контрольные задания по теоретической механике Учебно-методическое пособие Составители – Пинчук Э.В., Литвинова Т.А. Компьютерная вёрстка Вишнева М.М. Корректор Вишнева М.М. ИПО ВИТИ НИЯУ МИФИ Подписано к печати 07.05.2014 г. Бумага «SvetoCopy» 80 г/м2. Объем 4.56 усл.печ.л. Гарнитура «Times New Roman», Тираж 40 экз. Отпечатано в типографии ИПО ВИТИ НИЯУ МИФИ г. Волгодонск, ул. Ленина, 73/94 56