Математическая модель экологической ловушки
реклама

wESTNIK sAMgu
matematika
. 1999. N-4(14)
5
matemati~eskaq modelx |kologi~eskoj
lowu{ki
s.w. bOGATYREW1
sTROITSQ I ISSLEDUETSQ PROSTAQ \KOLOGI^ESKAQ MODELX, OPISYWA@]AQ WZAIMODEJSTWIE TREH POPULQCIJ "HI]NIK { DWE VERTWY", W PREDPOLOVENII, ^TO
ODNA VERTWA PRISPOSOBLENA K ZA]ITE OT HI]NIKA NAMNOGO HUVE WTOROJ. mODELX OPISYWAETSQ SINGULQRNO-WOZMU]ENNOJ SISTEMOJ DIFFERENCIALXNYH URAWNENIJ. pOKAZYWAETSQ, ^TO W OBY^NOJ SITUACII PLOHO PRISPOSOBLENNAQ VERTWA
OBRE^ENA NA UNI^TOVENIE. wWEDENIE MEHANIZMA PEREKL@^ENIQ HI]NIKA NA ZAPASNOJ WID VERTWY PRIWODIT K WYVIWANI@ PLOHO PRISPOSOBLENNOGO WIDA.
wWEDENIE
w 1984 GODU W VURNALE "w MIRE NAUKI" BYLA NAPE^ATANA RABOTA KANADSKOGO
\KOLOGA a.t. bERGR\DA (Arthur T. Bergerud) 1], W KOTOROJ ON OPISYWAL \KOLOGI^ESKU@ SISTEMU, SLOVIWU@SQ NA OSTROWE nX@FAUNDLEND. w SILU BEDNOSTI WIDOWOGO
SOSTAWA FAUNY OSTROWA nX@FAUNDLEND EGO \KOSISTEMA PO OBY^NYM MERKAM QWLQETSQ
WESXMA PROSTOJ (W NEE WHODIT WSEGO 14 WIDOW MLEKOPITA@]IH), I PO\TOMU ONA MOVET
SLUVITX SWOEGO RODA PRIRODNOJ LABORATORIEJ DLQ IZU^ENIQ PRINCIPOW, UPRAWLQ@]IH RAZMERAMI POPULQCII VIWOTNYH. |TO POZWOLILO a.t.bERGR\DU POSTAWITX RQD
\KSPERIMENTOW NEPOSREDSTWENNO NA PRIRODNYH POPULQCIQH, WHODQ]IH W \KOSISTEMU
OSTROWA, I NA OSNOWE POLU^ENNYH REZULXTATOW WYSKAZATX NESKOLXKO PREDPOLOVENIJ
O ZAKONAH FUNKCIONIROWANIQ \TOJ \KOSISTEMY. nEKOTORYE IZ EGO WYWODOW DOPUSKA@T
PROWERKU NA MATEMATI^ESKIH MODELQH.
iZ WSEH OPISYWAEMYH W RABOTE 1] \KOLOGI^ESKIH SITUACIJ MY RASSMOTRIM SITUACI@, NAZWANNU@ a.t. bERGR\DOM \KOLOGI^ESKOJ LOWUKOJ. |KOLOGI^ESKAQ LOWUKA
W PROSTEJEM SLU^AE MOVET WOZNIKNUTX UVE W SOOB]ESTWE "HI]NIK { DWE VERTWY".
oDNA IZ DWUH POPULQCIJ VERTW MOVET POPASTX W \KOLOGI^ESKU@ LOWUKU W TOM SLU^AE, ESLI OSOBI \TOJ POPULQCII PRISPOSOBLENY K ZA]ITE OT HI]NIKA NAMNOGO HUVE,
^EM OSOBI WTOROJ POPULQCII. pONQTNO, ^TO W \TOM SLU^AE HI]NIK BUDET PREDPO^ITATX OHOTU NA PLOHO PRISPOSOBLENNYJ WID VERTWY. kONE^NO, \TO MOVET PRIWESTI
K POLNOMU IS^EZNOWENI@ PLOHO PRISPOSOBLENNOJ POPULQCII VERTWY. nO WSE MOVET
SLOVITXSQ DLQ \TOJ POPULQCII PO-DRUGOMU.
nAPRIMER, PRI UMENXENII ^ISLENNOSTI PLOHO PRISPOSOBLENNOJ POPULQCII DO
NEKOTOROGO KRITI^ESKOGO UROWNQ MOVET PROIZOJTI (PO KAKOJ-LIBO PRI^INE) PEREKL@^ENIE HI]NIKA NA DRUGOJ (ZAPASNOJ) ISTO^NIK PI]I. |TO PEREKL@^ENIE SNIMET DAWLENIE HI]NIKA NA PLOHO PRISPOSOBLENNU@ POPULQCI@ I DAST EJ WOZMOVNOSTX WYVITX, NO TOLXKO ZA S^ET MALOJ ^ISLENNOSTI POPULQCII. tAKU@ SITUACI@
1 bOGATYREW sERGEJ wASILXEWI^, KAFEDRA MATEMATI^ESKOJ FIZIKI, sAMARSKIJ GOSUDARSTWENNYJ
UNIWERSITET
6
s w bOGATYREW
.
.
a.t. bERGR\D I NAZWAL \KOLOGI^ESKOJ LOWUKOJ DLQ PLOHO PRISPOSOBLENNOJ POPULQCII. pRI POPADANII W \KOLOGI^ESKU@ LOWUKU POPULQCIQ MOVET SU]ESTWOWATX, NO
TOLXKO ZA S^ET PODDERVANIQ EE ^ISLENNOSTI NA NIZKOM UROWNE.
w RABOTE 1] PRIWODITSQ NESKOLXKO PRIMEROW \KOSISTEM, W KOTORYH ODNA IZ POPULQCIJ VERTW POPADAET W \KOLOGI^ESKU@ LOWUKU. nAPRIMER, NA OSTROWE nX@FAUNDLEND POPULQCIQ POLQRNOGO ZAJCA POPADAET W \KOLOGI^ESKU@ LOWUKU W SOOB]ESTWE,
SOSTOQ]EM IZ POPULQCIJ RYSI, ZAJCA-BELQKA I POLQRNOGO ZAJCA. dLQ OB_QSNENIQ SUTI
LOWUKI PROCITIRUEM RABOTU 1].
"uSPEH RYSI W OHOTE NA DWA WIDA ZAJCEW ZAWISIT, POMIMO PRO^IH FAKTOROW, OT TIPA RASTITELXNOSTI I HARAKTERA SNEVNOGO POKROWA kOGDA RYSX I ZAQC-BELQK BEGUT
PO RYHLOMU TAEVNOMU SNEGU, ONI NAHODQTSQ W RAWNYH USLOWIQH S TO^KI ZRENIQ TOGO,
^TO U OBOIH VIWOTNYH NEWELIKA NAGRUZKA NA LAPY, T.E. DAWLENIE, OKAZYWAEMOE KONE^NOSTQMI NA OPORU WO WREMQ BEGA. w REZULXTATE ONI MOGUT BYSTRO PETLQTX MEVDU
DEREWXQMI, NE PROWALIWAQSX W SNEG. nAPROTIW, POLQRNYJ ZAQC PRISPOSOBLEN K PLOTNOMU SLEVAWEMUSQ SNEGU SEWERNOJ TUNDRY. nAGRUZKA NA LAPY U NEGO PO MENXEJ MERE
WDWOE BOLXE, ^EM U ZAJCA-BELQKA. w RYHLOM SNEGU POLQRNYJ ZAQC PROWALIWAETSQ, I
U NEGO OSTAETSQ MALO ANSOW SPASTISX OT RYSI."
tAKIM OBRAZOM, W LESISTOJ MESTNOSTI POLQRNYJ ZAQC PLOHO PRISPOSOBLEN K ZA]ITE OT RYSI, W OTLI^IE OT ZAJCA-BELQKA. nO \TO NE PRIWODIT K IS^EZNOWENI@ POPULQCII POLQRNOGO ZAJCA, KAK MOVNO BYLO BY OVIDATX. mNOGOLETNIE NABL@DENIQ
POKAZYWA@T, ^TO POPULQCIQ POLQRNOGO ZAJCA NA OSTROWE nX@FAUNLEND PRODOLVAET SU]ESTWOWATX, PRAWDA NA DOWOLXNO NIZKOM UROWNE. pO OCENKAM a.t. bERGR\DA, EE
^ISLENNOSTX DOWOLXNO STABILXNA I SOSTAWLQET PRIMERNO 1000 GOLOW NA WESX OSTROW.
e]E RAZ POD^ERKNEM, ^TO, SOGLASNO MNENI@ a.t. bERGR\DA, WYVIWANIE PLOHO PRISPOSOBLENNOJ POPULQCII VERTWY SWQZANO S PEREKL@^ENIEM HI]NIKA S ODNOGO WIDA
VERTWY NA DRUGOJ W TOT MOMENT, KOGDA ^ISLENNOSTX PLOHO PRISPOSOBLENNOJ POPULQCII UMENXAETSQ DO NEKOTOROGO KRITI^ESKOGO UROWNQ. mOVNO PRIWESTI NESKOLXKO
OB_QSNENIJ PODOBNOGO POWEDENIQ HI]NIKA. nAPRIMER, a.t. bERGR\D S^ITAET, ^TO ODNOJ IZ PRI^IN OTKAZA HI]NIKA OT DOBYWANIQ VERTWY QWLQETSQ NIZKAQ PLOTNOSTX
RASSELENIQ \TOGO WIDA VERTWY, BLAGODARQ ^EMU OHOTA NA \TOT WID STANOWITSQ DLQ
HI]NIKA \NERGETI^ESKI NEWYGODNOJ. dLQ POSTROENIQ MATEMATI^ESKOJ MODELI, OPISYWA@]EJ \KOLOGI^ESKU@ SISTEMU SO WSTROENNYM MEHANIZMOM PEREKL@^ENIQ, NE TAK
UV WAVNY PRI^INY, PO KOTORYM HI]NIK OTKAZYWAETSQ OT OHOTY NA PLOHO PRISPOSOBLENNU@ VERTWU.
dLQ NAIH CELEJ ZDESX WAVEN TOLXKO SAM FAKT SU]ESTWOWANIQ MEHANIZMA PEREKL@^ENIQ. nA SAMOM DELE W PRIRODNOJ OBSTANOWKE NEREDKO NABL@DA@TSQ SITUACII,
KOGDA HI]NIKI UMENXA@T ILI WOOB]E PREKRA]A@T POISK VERTWY MALO^ISLENNOGO WIDA I PEREKL@^A@TSQ NA BOLEE MNOGO^ISLENNYJ. tAKVE NEREDKO NABL@DAETSQ I
OBRATNYJ PROCESS, KOGDA PRI UWELI^ENII ^ASTOTY WSTRE^AEMOSTI KAKOGO-LIBO WIDA VERTWY HI]NIKI PEREKL@^A@TSQ NA EGO POISK I DOBY^U. oPISANIE NEKOTORYH
PODOBNYH SITUACIJ MOVNO NAJTI W RABOTAH 2{11].
sDELAEM E]E ODNO ZAME^ANIE, WAVNOE DLQ CELEJ NASTOQ]EJ RABOTY. sU]ESTWUET
DOWOLXNO MNOGO MODELEJ "HI]NIK{VERTWA". oPISANIE NEKOTORYH IZ NIH MOVNO NAJTI W RABOTAH d.o. lOGOFETA, `.m. sWIREVEWA I a.d. bAZYKINA 12{14]. w L@BU@ IZ
\TIH MODELEJ MOVET BYTX WSTROEN MEHANIZM OPISANNOJ WYE \KOLOGI^ESKOJ LOWUKI. w ODNOJ RABOTE NEWOZMOVNO RASSMOTRETX I IZU^ITX WSE WOZNIKA@]IE PODOBNYM
OBRAZOM SITUACII. pO\TOMU W NASTOQ]EJ RABOTE MY RASSMOTRIM NEKOTORU@ GIPOTETI^ESKU@ MODELX HI]NIK{VERTWA, SOSTOQ]U@ IZ DWUH OBYKNOWENNYH DIFFERENCIALXNYH URAWNENIJ, W KOTOROJ W KA^ESTWE RAWNOWESNOGO SOSTOQNIQ MOVET WOZNIKATX
:::
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
7
USTOJ^IWYJ PREDELXNYJ CIKL, OPISYWA@]IJ PERIODI^ESKIE KOLEBANIQ ^ISLENNOSTI
POPULQCIJ HI]NIKA I VERTWY. (hRESTOMATIJNYM QWLQETSQ OPISANIE NABL@DA@]IHSQ KOLEBANIJ ^ISLENNOSTI AMERIKANSKOGO ZAJCA-BELQKA I KANADSKOJ RYSI PO DANNYM
O ^ISLE KUR, SDANNYH W KOMPANI@ gUDZONOWA ZALIWA 15].)
k \TOJ GIPOTETI^ESKOJ MODELI "HI]NIK{VERTWA" MY DOBAWIM E]E ODNU POPULQCI@ VERTWY, SLABO PRISPOSOBLENNU@ K ZA]ITE OT HI]NIKA. oTMETIM, ^TO TAKAQ
DOPOLNENNAQ MODELX BUDET OPISYWATXSQ UVE TREMQ DIFFERENCIALXNYMI URAWNENIQMI, ODNO IZ KOTORYH BUDET SINGULQRNO-WOZMU]ENNYM. (sLABU@ PRISPOSOBLENNOSTX
ODNOJ IZ POPULQCIJ VERTW MOVNO OPISATX S POMO]X@ SINGULQRNOGO WOZMU]ENIQ.)
nAKONEC, W \TU MODELX MY WSTROIM MEHANIZM PEREKL@^ENIQ HI]NIKA S DWUH WIDOW
VERTW NA ODIN WID PRI UMENXENII PLOTNOSTI WTOROGO WIDA VERTWY NIVE NEKOTOROGO KRITI^ESKOGO UROWNQ.
cELX@ NASTOQ]EJ RABOTY QWLQETSQ NE TOLXKO POSTROENIE PODOBNOJ MODELI, NO I
IZU^ENIE EE. mODELX DOLVNA WESTI SEBQ ADEKWATNO REALXNO SU]ESTWU@]EJ \KOLOGI^ESKOJ SISTEME, T.E. PRI OTSUTSTWII WSTROENNOGO MEHANIZMA PEREKL@^ENIQ HI]NIKA
PLOHO PRISPOSOBLENNAQ POPULQCIQ VERTWY DOLVNA RAZRUATXSQ. pRI NALI^II MEHANIZMA PEREKL@^ENIQ ^ISLENNOSTX PLOHO PRISPOSOBLENNOJ POPULQCII DOLVNA PODDERVIWATXSQ NA NEKOTOROM DOWOLXNO NIZKOM UROWNE ILI KOLEBATXSQ OTNOSITELXNO
\TOGO UROWNQ S NEBOLXOJ AMPLITUDOJ. w \TOM WTOROM SLU^AE PLOHO PRISPOSOBLENNAQ POPULQCIQ DOLVNA BYTX SLABYM WOZMU]ENIEM (W SILU EE MALOJ ^ISLENNOSTI)
OSTAWEGOSQ SOOB]ESTWA HI]NIKA I VERTWY. wSE \TI \FFEKTY I BUDUT IMETX MESTO
DLQ POSTROENNYH W NASTOQ]EJ RABOTE MODELEJ.
sDELAEM E]E ODNO ZAME^ANIE. dLQ \TOGO PRIWEDEM PREVDE WSEGO E]E ODNU CITATU
IZ RABOTY 1]. "pROBLEMA PEREKL@^ENIQ HI]NIKA S ODNOGO WIDA VERTWY NA DRUGOJ
PREDSTAWLQET SOBOJ W NASTOQ]EE WREMQ OSOBO PERSPEKTIWNU@ OBLASTX \KOLOGI^ESKIH ISSLEDOWANIJ. iMENNO PONQTIE O PEREKL@^ENIQH POZWOLQET OB_QSNITX SU]ESTWOWANIE NEBOLXIH I NEUSTOJ^IWYH \KOSISTEM." wRQD LI a.t. bERGR\D, NE QWLQQSX
MATEMATIKOM, POD NEUSTOJ^IWOSTX@ \KOSISTEMY PONIMAL NEUSTOJ^IWOSTX PO lQPUNOWU. sKOREE WSEGO W EGO WYSKAZYWANII POD NEUSTOJ^IWOSTX@ PONIMAETSQ TO, ^TO
SOOB]ESTWO "HI]NIK { VERTWA { PLOHO PRISPOSOBLENNAQ VERTWA" QWLQETSQ NEUSTOJ^IWYM PRI OTSUTSTWII MEHANIZMA PEREKL@^ENIQ. |TO OZNA^AET, ^TO, KAK PRAWILO, W
\TOM SLU^AE POPULQCIQ PLOHO PRISPOSOBLENNOJ VERTWY RAZRUAETSQ. wWEDENIE MEHANIZMA PEREKL@^ENIQ DELAET \TO SOOB]ESTWO USTOJ^IWYM, T.E. POZWOLQET WYVITX
POPULQCII PLOHO PRISPOSOBLENNOJ VERTWY.
w SWQZI S \TIM POSLEDNIM ZAME^ANIEM SLEDUET OBRATITX WNIMANIE NA RABOTY
16,17], W KOTORYH RASSMATRIWALASX ZADA^A OB \KOLOGI^ESKOJ LOWUKE, OPISANNAQ W
1]. w \TIH RABOTAH BYLA POSTROENA I ISSLEDOWANA MATEMATI^ESKAQ MODELX, OPISYWA@]AQ SOOB]ESTWO ^ETYREH POPULQCIJ OSTROWA nX@FAUNDLEND. mODELX STROILASX
BEZ U^ETA \FFEKTA PEREKL@^ENIQ. pOD USTOJ^IWOSTX@ PONIMALOSX NALI^IE NEKOTOROJ RAWNOWESNOJ DINAMIKI W MODELI, USTOJ^IWOJ PO OTNOENI@ K MALYM IZMENENIQM
KO\FFICIENTOW MODELI. pOLU^ENNYJ W 16,17] REZULXTAT, PO SUTI DELA, OZNA^AET, ^TO
IMENNO NALI^IE PLOHO PRISPOSOBLENNOJ VERTWY DELAET WS@ \KOSISTEMU STABILXNOJ.
tAKIM OBRAZOM, W RABOTAH 16,17] CENTRALXNYM QWLQETSQ NE WOPROS O TOM, PRI KAKIH
USLOWIQH, ILI ZA S^ET ^EGO PROISHODIT WYVIWANIE PLOHO PRISPOSOBLENNOJ VERTWY,
A, NAOBOROT, WYVIWANIE VERTWY FAKTI^ESKI POSTULIRUETSQ W SAMOJ MODELI I IZU^AETSQ WLIQNIE \TOJ POPULQCII VERTWY NA DINAMIKU WSEJ \KOSISTEMY.
8
1.
s w bOGATYREW
.
.
mODELX "HI]NIK { DWE VERTWY"
~EREZ I BUDEM OBOZNA^ATX PLOTNOSTI POPULQCIJ VERTW, A ^EREZ { PLOTNOSTX POPULQCII HI]NIKA. oB]AQ MODELX, OPISYWA@]AQ DINAMIKU \KOLOGI^ESKOGO
TREUGOLXNIKA
, IMEET SLEDU@]IJ WID:
_ = 1( ) ; 1 ( )
_ = 2( ) ; 2( )
(1)
_ = ; 3 + ( 1 1( ) + 2 2( ))
zDESX 1 ( ) 2 ( ) QWLQ@TSQ OTNOSITELXNYMI SKOROSTQMI (T.E. SKOROSTQMI W RAS^ETE NA ODNU OSOBX) ROSTA POPULQCIJ I . oTMETIM, ^TO \TI SKOROSTI OPREDELQ@TSQ
NE TOLXKO SOBSTWENNOJ SKOROSTX@ ROSTA POPULQCIJ, NO TAKVE SU]ESTWOWANIEM WNUTRENNEJ I MEVPOPULQCIONNOJ KONKURENCII. 1 ( ) I 2 ( ) { TROFI^ESKIE FUNKCII
HI]NIKA (T.E. SKOROSTI POEDANIQ ODNOJ OSOBX@ HI]NIKA TOGO ILI INOGO WIDA VERTWY) PO OTNOENI@ K POPULQCIQM I . oTMETIM, ^TO TROFI^ESKAQ FUNKCIQ W OB]EM
SLU^AE DOLVNA U^ITYWATX NE TOLXKO ZAWISIMOSTX SKOROSTI POEDANIQ OT PLOTNOSTI
VERTWY, NO TAKVE I SU]ESTWOWANIE OPREDELENNOJ STRATEGII OHOTY HI]NIKA. w SLU^AE, KOGDA HI]NIK NE QWLQETSQ MONOFAGOM, PERED NIM WSEGDA POQWLQETSQ PROBLEMA
WYBORA STRATEGII DOBYWANIQ PI]I. oN MOVET OHOTITXSQ NA ODIN KAKOJ-TO WID I
PRENEBREGATX WSEMI DRUGIMI WIDAMI DO TEH POR, POKA ^ISLENNOSTX OSNOWNOGO WIDA DOBY^I NE STANET MENXE NEKOTOROGO UROWNQ, NO MOVET TAKVE OHOTITXSQ NA WSE
WIDY SRAZU PROPORCIONALXNO IH ^ISLENNOSTI, 3 { KO\FFICIENT SMERTNOSTI POPULQCII HI]NIKA PRI OTSUTSTWII VERTW, 1 I 2 { KO\FFICIENTY PERERABOTKI S_EDENNOJ
BIOMASSY VERTWY W BIOMASSU HI]NIKA.
|TA MODELX (ESLI OGRANI^IWATXSQ LIX SOSREDOTO^ENNYMI MODELQMI "HI]NIK
{ DWE VERTWY") IMEET MAKSIMALXNO OB]IJ WID I QWLQETSQ OB]EPRINQTOJ. bEZ KONKRETIZACII WYRAVENIJ DLQ FUNKCIJ OTNOSITELXNYH SKOROSTEJ ROSTA POPULQCIJ I
TROFI^ESKIH FUNKCIJ HI]NIKA \TA MODELX PO^TI NE PODDAETSQ ISSLEDOWANI@. k
TOMU VE ^REZMERNAQ OB]NOSTX MODELI ZATRUDNQET INTERPRETACI@ POLU^ENNYH REZULXTATOW. iZWESTNY, WPRO^EM, NESKOLXKO POPYTOK PROWESTI ISSLEDOWANIE MODELI
"HI]NIK{VERTWA" W PODOBNOM OB]EM WIDE 18-20].
w NASTOQ]EJ RABOTE, SLEDUQ IDEE RABOTY 13], MY KONKRETIZIRUEM MODELX (1)
SLEDU@]IM OBRAZOM:
_ = ( 1 ; 11( ) ; 12 ; 1 )
_ = ( 2 ; 21 ; 22( ) ; 2 )
(2)
_ = (; 3 + ( 1 + 2 ))
zDESX 1 I 2 | KO\FFICIENTY SOBSTWENNOGO ROSTA POPULQCIJ I SOOTWETSTWENNO
(PREDPOLAGAETSQ, ^TO W OTSUTSTWIE KONKURENCII OBE POPULQCII VERTW RASTUT SO SKOROSTX@, PROPORCIONALXNOJ IH PLOTNOSTQM, TAK ^TO 1 I 2 | KO\FFICIENTY \TOJ
PROPORCIONALXNOSTI). fUNKCII 12 I 21 QWLQ@TSQ WYRAVENIEM MEVPOPULQCIONNOJ KONKURENCII, A FUNKCII 11( ) I 22( ) { WNUTRIPOPULQCIONNOJ KONKURENCII
MEVDU POPULQCIQMI VERTW. pREDPOLAGAETSQ, ^TO MEVPOPULQCIONNAQ KONKURENCIQ
LINEJNYM OBRAZOM ZAWISIT OT PLOTNOSTI POPULQCIJ, A WNUTRIPOPULQCIONNAQ KONKURENCIQ { NELINEJNYM OBRAZOM.
wOPROSY KONKURENCII WNUTRI POPULQCIJ I MEVDU NIMI OBSUVDA@TSQ PRAKTI^ESKI W L@BOM U^EBNIKE PO \WOL@CIONNOJ \KOLOGII (SM. NAPRIMER, 21]). pRAWDA W
U^EBNIKAH OBY^NO OGRANI^IWA@TSQ OBSUVDENIEM LINEJNOGO SLU^AQ, NO SU]ESTWUET
NEMALO RABOT, W KOTORYH IZU^AETSQ NELINEJNAQ KONKURENCIQ. oDNOJ IZ POSLEDNIH
x
y
z
x y z
x
xg
x y
zV
x y y
yg
x y
zV
x y z
g
x y g
k z
z V
x y
V
x y
:
x y
x
y
V
x
x y
V
x y
y
k
k
x
x k
y
y k
z
z
k
x
x
x
y
z y
y
z :
k
x
k
y
x
x
y
k
y
9
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
RABOT TAKOGO RODA QWLQETSQ RABOTA 22], W KOTOROJ NAHODQTSQ USLOWIQ USTOJ^IWOSTI
SOSU]ESTWOWANIQ DWUH KONKURIRU@]IH POPULQCIJ W SLU^AE, KOGDA FUNKCII KONKURENCII QWLQ@TSQ KUBI^ESKIMI POLINOMAMI. w NEJ TAKVE MOVNO NAJTI OBZOR LITERATURY PO WOPROSAM NELINEJNOJ KONKURENCII WNUTRI I MEVDU POPULQCIQMI.
dLQ SISTEMY (2) MY BUDEM PREDPOLAGATX, ^TO FUNKCII 11( ) I 22( ) UDOWLETWORQ@T SLEDU@]IM USLOWIQM:
x
y
11(0) = 0
22(0) = 0
( ) UBYWA@T NA (0 ) I WOZRASTAET NA ( 1)
(3)
22( ) UBYWA@T NA (0 ) I WOZRASTAET NA ( 1)
9 0 : 11( 0 ) = 0 9 0 : 22( 0 ) = 0
|TI USLOWIQ OZNA^A@T, ^TO PRI MALOJ PLOTNOSTI POPULQCII WNUTRIPOPULQCIONNAQ
KONKURENCIQ IGRAET POLOVITELXNU@ ROLX DLQ EE UWELI^ENIQ, I LIX KOGDA PLOTNOSTX POPULQCII STANOWITSQ DOSTATO^NO BOLXOJ, ONA NA^INAET IGRATX OTRICATELXNU@ ROLX. |TOT \FFEKT OBY^NO NAZYWA@T \FFEKTOM oLLI.
pRI POSTROENII MODELI (2) IMEETSQ ODNA TRUDNOSTX, KOTORU@ MY UVE OTME^ALI,
NO KOTOROJ ZDESX MY NEQWNO PRENEBREGLI. dELO W TOM, ^TO PRI POME]ENII HI]NIKA
W SREDU, SOSTOQ]U@ IZ NESKOLXKIH WIDOW VERTW, PERED NIM POQWLQETSQ PROBLEMA WYBORA STRATEGII OHOTY NA DOBY^U. gRUBO GOWORQ, ESLI HI]NIK NE MONOFAG, TO ESTX NE
PITAETSQ ODNIM WIDOM VERTWY, TO PERED NIM WSTAET PROBLEMA WYBORA WIDA VERTWY,
NA KOTORU@ ON BUDET OHOTITXSQ W PERWU@ O^EREDX. nAPRIMER, ON MOVET OTDAWATX QWNOE PREDPO^TENIE NAIBOLEE MNOGO^ISLENNOMU WIDU, A POTOM PEREKL@^ITXSQ NA DRUGOJ
WID. dRUGAQ STRATEGIQ HI]NIKA MOVET ZAKL@^ATXSQ W PROPORCIONALXNOM WYEDANII
WIDOW VERTW W SOOTWETSTWII S IH ^ISLENNOSTX@. pO \TOJ TEME NAPISANO DOWOLXNO
MNOGO RABOT. sU]ESTWUET, NAPRIMER, TEORIQ OPTIMALXNOGO DOBYWANIQ PI]I I TEORIQ KORMOWYH PQTEN. sTRATEGII DOBYWANIQ PI]I POSWQ]ENA RABOTA 23], GDE MOVNO
NAJTI TAKVE OBZOR SU]ESTWU@]EJ PO \TOJ TEME LITERATURY.
sLEDUET OTMETITX, ^TO S MATEMATI^ESKOJ TO^KI ZRENIQ NAIBOLEE PRORABOTANNOJ
QWLQETSQ TEORIQ OPTIMALXNOGO DOBYWANIQ PI]I. wPERWYE \TA TEORIQ BYLA PREDLOVENA W RABOTE 24], A SWOE MATEMATI^ESKOE RAZWITIE S TO^KI ZRENIQ DINAMIKI MODELI
"HI]NIK{VERTWA" ONA POLU^ILA W RABOTAH 25,26].
w MODELI (2) MY NEQWNO PREDPOLAGALI, ^TO HI]NIK I OBA WIDA VERTW RASPREDELENY RAWNOMERNO PO ODNOJ I TOJ VE OBLASTI, TAK ^TO ^ASTOTA WSTRE^ HI]NIKA S
VERTWOJ PROPORCIONALXNA ^ISLENNOSTI VERTWY. kAVDAQ WSTRE^A HI]NIKA S VERTWOJ ZAKAN^IWAETSQ ATAKOJ HI]NIKA. aTAKA MOVET BYTX USPENOJ ILI NEUSPENOJ.
kO\FFICIENTY 1 2 QWLQ@TSQ WYRAVENIEM KOLI^ESTWA USPENYH ATAK.
|TI PREDPOLOVENIQ OZNA^A@T, ^TO STRATEGIEJ OHOTY HI]NIKA QWLQETSQ STRATEGIQ PROPORCIONALXNOGO DOBYWANIQ PI]I. tROFI^ESKAQ FUNKCIQ HI]NIKA PRI \TIH
9
9
x >
y >
0:
0:
x
11 x
x
x
y
y
y
> x
x
y
> y
y
:
PREDPOLOVENIQH QWLQETSQ LINEJNOJ FUNKCIEJ PLOTNOSTI VERTWY DLQ OBOIH WIDOW
VERTW. |TO NAIBOLEE PROSTOJ SPOSOB WWEDENIQ TROFI^ESKOJ FUNKCII HI]NIKA, W KOTOROM NE U^ITYWAETSQ \FFEKTA NASY]ENIQ HI]NIKA.
kO\FFICIENT PERERABOTKI BIOMASSY VERTWY W BIOMASSU HI]NIKA MY WZQLI
ODINAKOWYM DLQ OBOIH WIDOW VERTW, S^ITAQ TEM SAMYM, ^TO PO \NERGOEMKOSTI OBA
WIDA VERTW ODINAKOWY.
bUDEM PREDPOLAGATX, ^TO VERTWA PRISPOSOBLENA K ZA]ITE OT HI]NIKA NAMNOGO
HUVE VERTWY . |TO OZNA^AET, ^TO PRI ODINAKOWOM KOLI^ESTWE WSTRE^ HI]NIKA S
OSOBQMI OBOIH WIDOW POPULQCIJ VERTW KOLI^ESTWO USPENYH ATAK NA VERTWU MNOGO
BOLXE KOLI^ESTWA USPENYH ATAK NA VERTWU . mATEMATI^ESKI \TO OZNA^AET, ^TO
y
x
y
x
10
s w bOGATYREW
.
DLQ KO\FFICIENTOW
IMEET MESTO SOOTNOENIE
(4)
1 2
pREOBRAZUEM TEPERX MODELX (2) SLEDU@]IM OBRAZOM. pREVDE WSEGO WWEDEM MALYJ
POLOVITELXNYJ PARAMETR = 1 2 I OBY^NYJ PARAMETR = 1 . pEREMENNYE I
ZAMENIM NA PEREMENNYE I 1 . (dLQ NOWYH PEREMENNYH MY SOHRANQEM STARYE
OBOZNA^ENIQ, TAK ^TO E]E RAZ POD^ERKNEM, ^TO W (2) WYPOLNENA ZAMENA PEREMENNYH
7! , 7! 1 ). tOGDA MODELX (2) STANET SINGULQRNO-WOZMU]ENNOJ SISTEMOJ
DIFFERENCIALXNYH URAWNENIJ
_ = ( 1 ; 11( ) ; 12 ; )
_ = ; + ( 2 ; 21 ; 22( ))
(5)
_ = (; 3 + ( + ))
zAMETIM, ^TO DALEE, POMIMO ANALITI^ESKOGO ISSLEDOWANIQ \TOJ MODELI, MY BUDEM ILL@STRIROWATX POLU^ENNYE REZULXTATY S POMO]X@ ^ISLENNYH \KSPERIMENTOW
NAD MODELX@. dLQ \TOGO BUDEM RASSMATRIWATX MODELX (5) PRI SLEDU@]IH ^ISLOWYH ZNA^ENIJ PARAMETROW: 1 = 1 11( ) = 2 ( ; 1) 12 = 1 2 = 1 8 21 = 1
22( ) = 3 ( ; 0 2) 3 = 0 3 = 1 = 0 2.
nAPOMNIM, ^TO POWEDENIE MODELI (5) MY BUDEM IZU^ATX LIX W POLOVITELXNOM
OKTANTE PROSTRANSTWA 3 , T.E. W OBLASTI 3+ = f 0 0 0g, POSKOLXKU LIX
W \TOJ OBLASTI MODELX IMEET BIOLOGI^ESKIJ SMYSL. gRANICA \TOJ OBLASTI SOSTOIT
IZ KOORDINATNYH PLOSKOSTEJ = 0 = 0 = 0, KOTORYE DLQ SISTEMY (8) BUDUT
INWARIANTNYMI MNOGOOBRAZIQMI. pREVDE ^EM IZU^ATX POWEDENIE POLNOJ MODELI (5),
RASSMOTRIM SNA^ALA POWEDENIE \TOJ MODELI NA EE INWARIANTNYH MNOGOOBRAZIQH.
1
I
.
2
z
y
y
z
=
y
z=
x
x k
yz
z
z
y y
k
x
d
y
x
y
z y
:
k
R
x
y
x
x x
R
2.
d x
y k
k
k
y
d
z=
y
:
y
x
y
z
z
mODELX "HI]NIK { OBY^NAQ VERTWA"
dLQ OPISANIQ DWIVENIQ PO INTEGRALXNOMU MNOGOOBRAZI@ = 0 DOSTATO^NO W (5)
POLOVITX = 0. tOGDA MY POLU^IM SLEDU@]U@ SISTEMU
_ = ( 1 ; 11( ) ; )
(6)
_ = (; 3 + )
sISTEMA (6) OPISYWAET WZAIMODEJSTWIE POPULQCIJ "HI]NIK { OBY^NAQ VERTWA".
mY UVE OTME^ALI, ^TO SISTEMA WIDA (6) RASSMATRIWALASX W RABOTE 13]. pRIWEDEM
OSNOWNYE REZULXTATY, POLU^ENNYE W \TOJ RABOTE.
eDINSTWENNYM NETRIWIALXNYM POLOVENIEM RAWNOWESIQ SISTEMY (6) BUDET TO^KA
(
) = ( 3 1 ; 11( 3 )). nETRUDNO WIDETX, ^TO \TO POLOVENIE RAWNOWESIQ PRI
BUDET USTOJ^IWYM, A PRI
{ NEUSTOJ^IWYM. bUDEM RASSMATRIWATX WELI^INU = 3 KAK BIFURKACIONNYJ PARAMETR SISTEMY (6). tOGDA PRI IZMENENII
\TOGO PARAMETRA POLOVENIE RAWNOWESIQ SISTEMY (
) BUDET DWIGATXSQ PO KRIWOJ
= 1 ; 11( ) I PRI PROHOVDENII PARAMETRA ^EREZ ZNA^ENIE W NAPRAWLENII
UBYWANIQ POLOVENIE RAWNOWESIQ (
) IZ USTOJ^IWOGO STANET NEUSTOJ^IWYM.
sPOSOB POTERI USTOJ^IWOSTI POLOVENIQ RAWNOWESIQ (
) U SISTEMY (6) TAKOW,
^TO PRI \TOM IZ POLOVENIQ RAWNOWESIQ (
) ROVDAETSQ PERIODI^ESKOE REENIE
{ BIFURKACIONNYJ CIKL. s POMO]X@ OBY^NOJ TEHNIKI (SM., NAPRIMER, 27]) MOVNO
POKAZATX, ^TO PRI WYPOLNENII USLOWIQ 00011( ) ;2 0011( ) \TOT BIFURKACIONNYJ
y
y
x z
x
k =d k
> x
x
x k
z
z
x
z dx :
k =d
x
x
k
< x
k =d
x z
z
k
x
x
x
x z
x z
x z
x x <
x
11
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
CIKL
p BUDET ASIMPTOTI^ESKI USTOJ^IWYM I BUDET IMETX AMPLITUDU PORQDKA const j ; j + (j ; j). tAKIM OBRAZOM W SISTEME (6) PRI
x
x
O
x
x
(7)
k3 =d < x
PROISHODIT MQGKOE SAMOWOZBUVDENIE AWTOKOLEBANIJ. oGRANI^IMSQ RASSMOTRENIEM
TOLXKO \TOGO SLU^AQ.
kAK POKAZYWA@T ^ISLENNYE \KSPERIMENTY, PRI DALXNEJEM UMENXENII BIFURKACIONNOGO PARAMETRA AMPLITUDA AWTOKOLEBANIJ RASTET, I OTDELXNYE U^ASTKI
PREDELXNOGO CIKLA SU]ESTWENNOJ DLINY MOGUT POPASTX W DOSTATO^NO MALYE OKRESTNOSTI OSEJ KOORDINAT = 0 (ILI = 0). oTMETIM, ^TO OSI KOORDINAT QWLQ@TSQ
INTEGRALXNYMI MNOGOOBRAZIQMI DLQ SISTEMY (6). nALI^IE TAKIH U^ASTKOW OZNA^AET, ^TO PERIODI^ESKI ^ISLENNOSTI POPULQCIJ VERTWY (ILI HI]NIKA) STANOWQTSQ
DOSTATO^NO MALYMI. w \TOM SLU^AE SLU^AJNYE WOZDEJSTWIQ NA POPULQCI@ MOGUT
PRIWESTI K EE IS^EZNOWENI@, TO ESTX POPULQCIQ S MALOJ ^ISLENNOSTX@ STANOWITSQ
NEUSTOJ^IWOJ S BIOLOGI^ESKOJ TO^KI ZRENIQ. pO\TOMU OSOBYJ INTERES PRIOBRETAET
WOPROS O ZNA^ENII , PRI KOTOROM OTDELXNYE U^ASTKI PREDELXNOGO CIKLA POPADA@T
W MALYE OKRESTNOSTI ODNOJ IZ OSEJ KOORDINAT.
i S MATEMATI^ESKOJ I S BIOLOGI^ESKOJ TO^KI ZRENIQ WAVNO ZNATX, K KAKOJ IZ OSEJ
KOORDINAT ( , ILI ) W PERWU@ O^EREDX BUDET PRIVIMATXSQ BIFURKACIONNYJ
CIKL. kAK POKAZYWA@T ^ISLENNYE \KSPERIMENTY, WOZMOVEN KAK TOT, TAK I DRUGOJ
SLU^AI.
dLQ BIOLOGII POPADANIE CIKLA W MALU@ OKRESTNOSTX KOORDINATNOJ OSI OZNA^AET
IS^EZNOWENIE ODNOJ IZ POPULQCII. rAZUMEETSQ, WAVNO ZNATX, KAKAQ IZ DWUH POPULQCIJ
(HI]NIKA ILI VERTWY) IS^EZNET W PERWU@ O^EREDX. eSLI RAZRUAETSQ POPULQCIQ
VERTWY, TO OSTAWAQSQ POPULQCIQ BUDET POPULQCIEJ HI]NIKA I EJ W \TOM SLU^AE
TAKVE GROZIT IS^EZNOWENIE. eSLI VE OSTAETSQ POPULQCIQ VERTWY, TO ONA POLU^AET
WOZMOVNOSTX DALXE RAZWIWATXSQ BEZ DAWLENIQ SO STORONY HI]NIKA.
s MATEMATI^ESKOJ TO^KI ZRENIQ NI ODNA IZ POPULQCIJ NE IS^EZNET, KAK BY BLIZKO
NI PODHODIL PREDELXNYJ CIKL K OSQM KOORDINAT, POSKOLXKU PREDELXNYJ CIKL SISTEMY (6) QWLQETSQ USTOJ^IWYM. tAKIM OBRAZOM, SISTEMA (6) KA^ESTWENNO NE IZMENQETSQ
PRI IZMENENII BIFURKACIONOGO PARAMETRA W OBLASTI (0 ). nO SISTEMA (6) OPISYWAET DWIVENIE SISTEMY (5) PO MNOGOOBRAZI@ = 0, I \TI DWIVENIQ MOGUT BYTX
USTOJ^IWYMI ILI NEUSTOJ^IWYMI PO OTNOENI@ KO WSEJ SISTEME (5). rASSMOTRIM
\TOT WOPROS PODROBNEE.
pREVDE WSEGO ZAMETIM, ^TO OKTANT 3+ MOVNO PREDSTAWITX W WIDE 3+ = ys yu yn , GDE
ys = 3+ \ f
( 2 ; 21 ; 22( ))g
yu = 3+ \ f
( 2 ; 21 ; 22( ))g
yn = 3+ \ f = ( 2 ; 21 ; 22( ))g
tRAEKTORIQ SISTEMY (5), WYHODQ]AQ IZ NA^ALXNOJ TO^KI, LEVA]EJ W OBLASTI yu,
BUDET \KSPONENCIALXNO BYSTRO UDALQTXSQ OT INTEGRALXNOGO MNOGOOBRAZIQ = 0 DO
TEH POR, POKA ONA NE WYJDET IZ \TOJ OBLASTI. tAKIM OBRAZOM yu MOVNO NAZWATX
OBLASTX@ OTTALKIWANIQ MNOGOOBRAZIQ = 0. tRAEKTORIQ SISTEMY (5), POPAWAQ W
OBLASTX ys , BUDET \KSPONENCIALXNO BYSTRO STREMITXSQ K INTEGRALXNOMU MNOGOOBRAZI@ = 0, POKA ONA NE WYJDET IZ \TOJ OBLASTI. tAKIM OBRAZOM ys MOVNO NAZWATX
OBLASTX@ PRITQVENIQ = 0.
pRI ISSLEDOWANII SISTEMY (5) WAVNO ZNATX, POPADAET LI KAKAQ-NIBUDX ^ASTX
PREDELXNOGO CIKLA SISTEMY (6) W OBLASTX OTTALKIWANIQ yu, ILI WESX PREDELXNYJ
CIKL CELIKOM BUDET LEVATX W OBLASTI PRITQVENIQ ys .
x
x
z
x
Ox
Oz
x
x
y
R
R
R
z > k
x
y
R
z < k
x
y
R
z
x
y
:
k
y
y
y
y
;
12
s w bOGATYREW
.
.
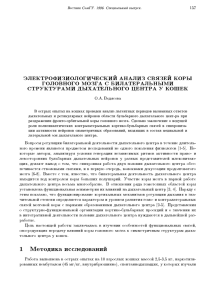
rIS. 1: iZOBRAVENIE PREDELXNOGO CIKLA SISTEMY (6) I SLEDOW OBLASTEJ PRITQVENIQ I OTTALKIWANIQ SISTEMY (5)
nA RIS. 1 PRIWEDEN GRAFIK PREDELXNOGO CIKLA SISTEMY (2), POSTROENNYJ S POMO]X@ ^ISLENNYH METODOW. dLQ RASSMOTRENNOGO SLU^AQ NETRIWIALXNYM POLOVENIEM
RAWNOWESIQ BUDET TO^KA S KOORDINATAMI (0 3 1 42), TAK ^TO = 0 3. kROME \TOGO,
= 0 5. pOSKOLXKU
, TO POLOVENIE RAWNOWESIQ (
) W \TOM SLU^AE BUDET
NEUSTOJ^IWYM I SISTEMA (6) BUDET IMETX USTOJ^IWYJ BIFURKACIONNYJ PREDELXNYJ
CIKL, ^TO I WIDNO NA RISUNKE. sLEDUET OTMETITX, ^TO CIKL IMEET BOLXIE RAZMERY,
I ^ASTX TRAEKTORII CIKLA LEVIT WBLIZI KOORDINATNOJ OSI = 0. kROME PREDELXNOGO CIKLA NA RIS. 1 PRIWODITSQ IZOBRAVENIE IZOKLIN SISTEMY (6), IH PERESE^ENIE
DAET POLOVENIE RAWNOWESIQ. nAKONEC, NA RISUNKE PRIWODITSQ IZOBRAVENIE SLEDOW
OBLASTEJ PRITQVENIQ ys I OTTALKIWANIQ yu MNOGOOBRAZIQ = 0. wIDNO, ^TO W
RASSMATRIWAEMOM SLU^AE PREDELXNYJ CIKL CELIKOM LEVIT W OBLASTI PRITQVENIQ.
nETRUDNO WIDETX, ^TO POLOVENIE RAWNOWESIQ SISTEMY (6) PRAKTI^ESKI WSEGDA
BUDET LEVATX W OBLASTI PRITQVENIQ ys . pREDELXNYJ CIKL MOVET WYHODITX IZ OBLASTI PRITQVENIQ, NO I W \TOM SLU^AE BOLXAQ ^ASTX PREDELXNOGO CIKLA OSTAETSQ W
OBLASTI PRITQVENIQ.
x
x
x
< x
x z
x
y
3.
oBSUVDENIE MODELI "HI]NIK { VERTWA"
tEPERX, SLEDUQ 13], DADIM BIOLOGI^ESKU@ INTERPRETACI@ \TIM REZULXTATAM.
iNTERPRETACI@ UDOBNO DAWATX W TERMINAH STEPENEJ ADAPTACII POPULQCIJ VERTWY
I HI]NIKA K WNENEJ SREDE. rASSMOTRIM SNA^ALA PONQTIE ADAPTACII DLQ POPULQCII
VERTWY. pOPULQCIQ VERTWY W RASSMATRIWAEMOJ MODELI QWLQETSQ SAMODOSTATO^NOJ:
EE RAZWITIE PROISHODIT I W OTSUTSTWIE POPULQCII HI]NIKA. pRI OTSUTSTWII HI]NIKA DINAMIKA POPULQCII VERTWY BUDET OPISYWATXSQ SLEDU@]IM URAWNENIEM:
_ = ( 1 ; 11( ))
x
x k
x
:
13
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
nETRIWIALXNYM SOSTOQNIEM RAWNOWESIQ \TOJ SISTEMY BUDET REENIE = 0 URAWNENIQ 11( ) = 1. iZ SWOJSTW FUNKCII 11( ) SLEDUET, ^TO \TO EDINSTWENNOE NETRIWIALXNOE SOSTOQNIE, KOTOROE K TOMU VE BUDET USTOJ^IWYM. zNA^ENIE = 0 ^ASTO
NAZYWA@T EMKOSTX@ SREDY. kROME TOGO, SPRAWEDLIWO NERAWENSTWO
0. (nAPOMNIM, ^TO QWLQETSQ TO^KOJ \KSTREMUMA FUNKCII 11( ).)
eSLI U \TOJ MODELI ZAFIKSIROWATX RAWNOWESNOE SOSTOQNIE 0 I NA^ATX IZMENQTX
ZNA^ENIE W STORONU UWELI^ENIQ, TO PRI \TOM BUDET UWELI^IWATXSQ WREMQ DOSTIVENIQ POPULQCIEJ RAWNOWESNOGO SOSTOQNIQ. ~EM BYSTREE POPULQCIQ DOSTIGAET RAWNOWESNOGO SOSTOQNIQ, TEM LU^E ONA ADAPTIROWANA K USLOWIQM WNENEJ SREDY. tAKIM
OBRAZOM, PRI MALYH ZNA^ENIQH (PO SRAWNENI@ S 0 ) POPULQCIQ VERTWY BUDET HOROO ADAPTIROWANA K WNENEJ SREDE I PRI UWELI^ENII ADAPTIROWANNOSTX POPULQCII
BUDET UHUDATXSQ. sLEDOWATELXNO, MEROJ ADAPTIROWANNOSTI MOVNO S^ITATX WELI^INU .
rASSMOTRIM TEPERX POPULQCI@ HI]NIKA S TO^KI ZRENIQ EE ADAPTIRUEMOSTI K
USLOWIQM WNENEJ SREDY. w OTSUTSTWIE VERTWY POPULQCIQ HI]NIKA WYMIRAET. pRI
FIKSIROWANNOM ZNA^ENII PLOTNOSTI POPULQCII VERTWY DINAMIKA POPULQCII HI]NIKA OPISYWAETSQ URAWNENIEM
_ = (; 3 + )
oTS@DA WIDNO, ^TO PRI
3 POPULQCIQ HI]NIKA BUDET WYMIRATX, A PRI
^ISLENNOSTX POPULQCII HI]NIKA BUDET UWELI^IWATXSQ. tAKIM OBRAZOM, INTERWAL ( 1) SOSTOIT IZ TEH ZNA^ENIJ ^ISLENNOSTI POPULQCII VERTWY, PRI KOTORYH
^ISLENNOSTX POPULQCII HI]NIKA BUDET WOZRASTATX. pONQTNO, ^TO ^EM IRE INTERWAL
( 1), TEM LU^E ADAPTIROWAN HI]NIK K USLOWIQM WNENEJ SREDY. sLEDOWATELXNO,
3 QWLQETSQ MEROJ ADAPTIROWANNOSTI HI]NIKA. pRI MALYH HI]NIK HOROO ADAPTIROWAN K WNENEJ SREDE, PRI UWELI^ENII EGO ADAPTIRUEMOSTX UHUDAETSQ. hI]NIK BUDET HOROO ADAPTIROWAN K WNENEJ SREDE PRI MALOM KO\FFICIENTE
ESTESTWENNOJ SMERTNOSTI 3 , PRI BOLXOM kpd PERERABOTKI BIOMASSY VERTWY W
BIOMASSU HI]NIKA I PRI BOLXOJ OTNOSITELXNOJ SKOROSTI POTREBLENIQ VERTWY.
tEPERX MY MOVEM, SLEDUQ 13], W TERMINAH MER ADAPTIROWANNOSTI POPULQCIJ
VERTWY I HI]NIKA DATX SLEDU@]U@ INTERPRETACI@ POLU^ENNYM RANEE REZULXTATAM
OB USTOJ^IWOSTI I NEUSTOJ^IWOSTI NETRIWIALXNOGO POLOVENIQ RAWNOWESIQ. pOLOVENIE RAWNOWESIQ (
) QWLQETSQ USTOJ^IWYM PRI
, T.E. W SLU^AE, KOGDA VERTWA
LU^E ADAPTIROWANA K WNENEJ SREDE, ^EM HI]NIK. eSLI, NAOBOROT, HI]NIK LU^E
ADAPTIROWAN K WNENEJ SREDE, ^EM VERTWA, TO POLOVENIE RAWNOWESIQ (
) STANOWITSQ NEUSTOJ^IWYM, NO ZATO U MODELI (6) POQWLQ@TSQ AWTOKOLEBANIQ T.E. ^ISLENNOSTI POPULQCIJ VERTWY I HI]NIKA NA^INA@T PERIODI^ESKI IZMENQTXSQ. aMPLITUDA \TIH KOLEBANIJ TEM BOLXE, ^EM LU^E ADAPTIROWANNOSTX HI]NIKA . w \TOM
SLU^AE MOVNO GOWORITX O RAZBALANSIROWANNOSTI \KOSISTEMY "HI]NIK{VERTWA". pRI
DOSTATO^NO MALYH ZNA^ENIQH ^ISLENNOSTI ( ) I ( ) POPULQCIJ VERTWY I HI]NIKA W OTDELXNYE MOMENTY WREMENI MOGUT PRINIMATX MALYE ZNA^ENIQ, ^TO W SWO@
O^EREDX ZA S^ET SLU^AJNYH WOZMU]ENIJ MOVET PRIWESTI K IS^EZNOWENI@ POPULQCII
VERTWY ILI HI]NIKA.
x
k
x
x
x
x
x
x < x
x
x
x
x
x
x
x
x
z
x < x
z
k
dx :
k =d
x > x
x x x
k =d
x
x
k
d
x z
x
> x
x z
x
x
x t
z t
14
s w bOGATYREW
.
.
mODELX "HI]NIK { PLOHO PRISPOSOBLENNAQ
VERTWA"
4.
pOLAGAQ W (5) = 0, POLU^IM MODELX "HI]NIK { PLOHO PRISPOSOBLENNAQ VERTWA"
_ = ; + ( 2 ; 22( ))
(8)
_ = (; 3 + )
|TA SISTEMA IMEET TO^NO TAKOJ VE WID, ^TO I SISTEMA (6). pO\TOMU ONA IMEET NETRIWIALXNOE POLOVENIE RAWNOWESIQ W TO^KE ( 3 ( 2 ; 22( ))) PERESE^ENIQ IZOKLIN.
pRI WYPOLNENII USLOWIQ
x
y
yz
z
z
k
y k
y
dy :
k =d k
y
(9)
k3 =d < y=
GDE QWLQETSQ TO^KOJ MAKSIMUMA FUNKCII 2 ; 22( ), \TO POLOVENIE RAWNOWESIQ
STANOWITSQ NEUSTOJ^IWYM, A U SISTEMY (8) POQWLQETSQ USTOJ^IWYJ PREDELXNYJ CIKL.
zAMETIM, ^TO PRI MALYH USLOWIE (9) BUDET WYPOLNQTXSQ.
nO SISTEMA (8) QWLQETSQ TAKVE SINGULQRNO-WOZMU]ENNOJ SISTEMOJ DIFFERENCIALXNYH URAWNENIJ. sINGULQRNO-WOZMU]ENNYE SISTEMY DIFFERENCIALXNYH URAWNENIJ OBY^NO IZU^A@T LIBO S POMO]X@ METODA POGRANI^NYH FUNKCIJ 28], LIBO S
POMO]X@ METODA INTEGRALXNYH MNOGOOBRAZIJ 29,30]. pOSKOLXKU ZDESX MY ZANIMAEMSQ KA^ESTWENNYM ISSLEDOWANIEM SISTEMY (8), TO UDOBNEE WOSPOLXZOWATXSQ METODOM
INTEGRALXNYH MNOGOOBRAZIJ.
w SOOTWETSTWII S TERMINOLOGIEJ TEORII INTEGRALXNYH MNOGOOBRAZIJ INWARIANTNOE MNOGOOBRAZIE = 0 BUDET DLQ SISTEMY (8) EE INTEGRALXNYM MNOGOOBRAZIEM
MEDLENNYH DWIVENIJ. |TO OZNA^AET, ^TO L@BOE REENIE SISTEMY (8) MOVNO PREDSTAWITX W WIDE SUMMY DWUH ^ASTEJ: MEDLENNOJ ^ASTI (\TO REENIE SISTEMY (8), LEVA]EE
NA INTEGRALXNOM MNOGOOBRAZII = 0) I BYSTROJ ^ASTI (\TO \KSPONENCIALXNO BYSTRO
IZMENQ@]IJSQ OSTATOK).
oTMETIM, ^TO MEDLENNYE DWIVENIQ SISTEMY (8), T.E. DWIVENIE PO INTEGRALXNOMU
MNOGOOBRAZI@ = 0, BUDUT OPISYWATXSQ URAWNENIEM
_=; 3
|TO URAWNENIE OPISYWAET DINAMIKU POPULQCII HI]NIKA W OTSUTSTWIE POPULQCII
VERTWY I OZNA^AET, ^TO W \TOM SLU^AE ^ISLENNOSTX POPULQCII HI]NIKA STREMITSQ
K NUL@.
wAVNOJ ^ASTX@ TEORII INTEGRALXNYH MNOGOOBRAZIJ QWLQETSQ OBOSNOWANIE ZAMENY ISSLEDOWANIQ POLNOJ SINGULQRNO-WOZMU]ENNOJ SISTEMY SISTEMOJ, OPISYWA@]EJ
MEDLENNYE DWIVENIQ. pEREJTI OT ISSLEDOWANIQ POLNOJ SISTEMY K ISSLEDOWANI@ SISTEMY MEDLENNYH DWIVENIJ MOVNO W SLU^AE USTOJ^IWOSTI INTEGRALXNOGO MNOGOOBRAZIQ.
dLQ MODELI (8) INTEGRALXNOE MNOGOOBRAZIE = 0 NE BUDET CELIKOM USTOJ^IWYM: EGO MOVNO RAZBITX NA USTOJ^IWU@ I NEUSTOJ^IWU@ ^ASTI. tO^NEE, OBLASTX
( ( 2 ; 22(0)) 1) PRQMOJ = 0 BUDET USTOJ^IWOJ, A OBLASTX (0 ( 2 ; 22(0))) {
NEUSTOJ^IWOJ. sU]ESTWOWANIE NEUSTOJ^IWOJ ^ASTI INTEGRALXNOGO MNOGOOBRAZIQ PROQWLQETSQ W WIDE POQWLENIQ PREDELXNOGO BIFURKACIONNOGO CIKLA. tO^KA, DWIGA@]AQSQ PO \TOMU CIKLU, SNA^ALA STREMITSQ K MNOGOOBRAZI@ = 0, POSKOLXKU NAHODITSQ
W OBLASTI PRITQVENIQ USTOJ^IWOJ ^ASTI MNOGOOBRAZIQ, POTOM DWIGAETSQ WDOLX \TOGO MNOGOOBRAZIQ, SNA^ALA WDOLX USTOJ^IWOJ ^ASTI, POTOM { WDOLX NEUSTOJ^IWOJ, I,
NAKONEC, UBEGAET OT NEGO.
y
k
y
y
y
y
z
k z:
y
k
y
k
y
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
15
nAKONEC, SISTEMA (8) SAMA PO SEBE OPISYWAET DWIVENIE PO INTEGRALXNOMU MNOGOOBRAZI@ = 0 SISTEMY (5). |TO MNOGOOBRAZIE MOVNO RAZBITX NA OBLASTI PRITQVENIQ I OTTALKIWANIQ (TO^NO TAK VE, KAK I MNOGOOBRAZIE = 0). tO^NEE, IMEET MESTO
PREDSTAWLENIE 3+ = xs xn xu, GDE
xs = 3+ \ f ( 1 ; 11( ) ; 12 )g
xu = 3+ \ f ( 1 ; 11( ) ; 12 )g
xn = 3+ \ f = ( 1 ; 11( ) ; 12 )g
zDESX xs QWLQETSQ OBLASTX@ PRITQVENIQ, A xu { OBLASTX@ OTTALKIWANIQ MNOGOOBRAZIQ = 0 SISTEMY (5).
x
y
R
R
z >
k
x
y
;
R
z <
k
x
y
R
z
k
x
y
:
x
rIS. 2: iZOBRAVENIE PREDELXNOGO CIKLA, IZOKLIN I SLEDOW OBLASTEJ PRITQVENIQ I OTTALKIWANIQ DLQ SISTEMY (8)
nA RIS. 2 PRIWEDENO IZOBRAVENIE PREDELXNOGO CIKLA I IZOKLIN SISTEMY (8). kROME \TOGO, NA RIS. 2 PRIWODITSQ IZOBRAVENIE SLEDOW OBLASTEJ PRITQVENIQ I OTTALKIWANIQ DLQ MNOGOOBRAZIQ = 0. wAVNO TO, ^TO POLOVENIE RAWNOWESIQ SISTEMY (8) PRI
WSEH DOSTATO^NO MALYH LEVIT W OBLASTI OTTALKIWANIQ. pREDELXNYJ CIKL SISTEMY
(8) MOVET WYHODITX ZA PREDELY OBLASTI OTTALKIWANIQ, NO LIX SWOEJ NEBOLXOJ
^ASTX@.
x
5.
mODELX "VERTWA { VERTWA"
pOLAGAQ = 0 W SISTEME (5), POLU^IM MODELX, OPISYWA@]U@ DINAMIKU DWUH
KONKURIRU@]IH POPULQCIJ TIPA "VERTWA { VERTWA".
_ = ( 1 ; 11( ) ; 12 )
(10)
_ = ( 2 ; 21 ; 22( ))
dWE KONKURIRU@]IH POPULQCII MOGUT PO-RAZNOMU SEBQ WESTI PO OTNOENI@ DRUG
K DRUGU. nAPRIMER, ODNA IZ POPULQCIJ WSEGDA MOVET WYTESNQTX DRUGU@ NEZAWISIMO
OT NA^ALXNOGO SOSTOQNIQ \TIH POPULQCIJ, ILI W ZAWISIMOSTI OT NA^ALXNOGO SOSTOQNIQ POPULQCIJ L@BAQ IZ NIH MOVET WYTESNQTX DRUGU@. nAKONEC, POPULQCII MOGUT
z
x
x k
y
y k
x
x
y y
:
16
;
s w bOGATYREW
.
.
rIS. 3: rASPOLOVENIE IZOKLIN SISTEMY (10), PRI KOTOROM POPULQCII USTOJ^IWO SOSU]ESTWU@T
USTOJ^IWO SOSU]ESTWOWATX. wSE \TI \FFEKTY MOVNO NABL@DATX UVE NA MODELQH S
LINEJNOJ MATRICEJ KONKURENCII.
w SLU^AE NELINEJNOJ MATRICY KONKURENCII MOGUT NABL@DATXSQ BOLEE SLOVNYE
\FFEKTY WZAIMODEJSTWIQ POPULQCIJ. nO DLQ NAEJ MODELI (10) MY BUDEM PREDPOLAGATX, ^TO POPULQCII I USTOJ^IWO SOSU]ESTWU@T W KAKOM-TO STACIONARNOM SOSTOQNII I TAKOE SOSTOQNIE EDINSTWENNO. nESMOTRQ NA NELINEJNYJ HARAKTER MODELI,
NETRUDNO NAJTI USLOWIQ, PRI KOTORYH TAKOE POWEDENIE MODELI BUDET IMETX MESTO.
wO-PERWYH, DLQ SU]ESTWOWANIQ EDINSTWENNOGO NETRIWIALXNOGO RAWNOWESIQ SISTEMY (10) IZOKLINY \TOJ SISTEMY DOLVNY PERESEKATXSQ W EDINSTWENNOJ TO^KE. w
0g NA ^ETYRE ^ASTI. wO\TOM SLU^AE IZOKLINY RAZOBX@T OBLASTX 2+ = f 0
WTORYH, DLQ USTOJ^IWOSTI \TOGO POLOVENIQ RAWNOWESIQ NADO, ^TOBY W KAVDOJ IZ \TIH
^ASTEJ WEKTOR NAPRAWLENIQ SISTEMY (10) BYL NAPRAWLEN K POLOVENI@ RAWNOWESIQ.
|TO BUDET IMETX MESTO PRI RASPOLOVENII IZOKLIN, POKAZANNOM NA RIS. 3.
pONQTNO, ^TO PODOBNOE RASPOLOVENIE IZOKLIN BUDET IMETX MESTO PRI WYPOLNENII
USLOWIJ
1 ; 11(0)
2 ; 22(0)
(11)
x
y
R
y0 <
GDE
k
12
x >
x0 <
k
y >
21
0 QWLQETSQ REENIEM URAWNENIQ 11( ) = 1 , A 0 { URAWNENIQ 22( 0 ) = 2 .
nA RIS. 3 IZOBRAVENY IZOKLINY SISTEMY (10), KOTORYE PERESEKA@TSQ W TO^KE
USTOJ^IWOGO POLOVENIQ RAWNOWESIQ \TOJ SISTEMY. kROME \TOGO, NA RIS. 3 PRIWEDENY IZOBRAVENIQ SLEDOW OBLASTEJ PRITQVENIQ zs I OTTALKIWANIQ zu MNOGOOBRAZIQ
= 0 SISTEMY (5). |TI OBLASTI OPISYWA@TSQ SLEDU@]IMI SOOTNOENIQMI I OPREDELQ@TSQ TO^NO TAK VE, KAK OPREDELQLISX OBLASTI PRITQVENIQ I OTTALKIWANIQ DLQ
MNOGOOBRAZIJ = 0 I = 0 W PREDYDU]IH RAZDELAH RABOTY.
zs = 3+ \ f ( + ) 3g
zu = 3+ \ f ( + ) 3g
zn = 3+ \ f ( + ) = 3g
x
x
k
y
z
x
y
R
d x
y
< k
R
d x
y
> k
R
d x
y
k
:
y
k
17
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
wAVNO OTMETITX, ^TO PRI SDELANNYH PREDPOLOVENIQH POLOVENIE RAWNOWESIQ SISTEMY (10) WSEGDA BUDET LEVATX W OBLASTI OTTALKIWANIQ zu.
6.
iSSLEDOWANIE MODELI "HI]NIK { DWE VERTWY"
pOLNAQ MODELX "HI]NIK { DWE VERTWY" W RASSMATRIWAEMOM SLU^AE OPISYWAETSQ SINGULQRNO-WOZMU]ENNOJ SISTEMOJ DIFFERENCIALXNYH URAWNENIJ (5). w SOOTWETSTWII S BIOLOGI^ESKIM SMYSLOM MODELI ONA DOLVNA RASSMATRIWATXSQ LIX W
OBLASTI 3+ = f 0 0 0g. mNOGOOBRAZIEM MEDLENNYH DWIVENIJ DLQ \TOJ
SISTEMY QWLQETSQ PLOSKOSTX = 0, PRI^EM MEDLENNYE DWIVENIQ, TO ESTX DWIVENIQ
PO \TOMU MNOGOOBRAZI@, BUDUT OPISYWATXSQ SISTEMOJ (6). sISTEMA (6) W SOOTWETSTWII
S PREDPOLOVENIQMI (3), NALOVENNYMI NA POLNU@ SISTEMU, LIBO IMEET NETRIWIALXNOE USTOJ^IWOE POLOVENIE RAWNOWESIQ, LIBO { USTOJ^IWYJ PREDELXNYJ CIKL, PRI^EM
\TI RAWNOWESNYE SOSTOQNIQ SISTEMY POLNOSTX@ OPREDELQ@T OSOBENNOSTI POWEDENIQ
EE FAZOWYH TRAEKTORIJ.
rASSMOTRIM DALEE WOPROS O POWEDENII FAZOWYH TRAEKTORIJ SISTEMY (5) W OBLASTI 3+ PO OTNOENI@ K MNOGOOBRAZI@ = 0. nAPOMNIM, ^TO ZDESX NAS INTERESUET
WOPROS O TOM, MOVET LI POPULQCIQ PLOHO PRISPOSOBLENNOJ VERTWY WYVITX, ILI VE W
L@BOM SLU^AE ONA DOLVNA POGIBNUTX. s MATEMATI^ESKOJ TO^KI ZRENIQ \TO OZNA^AET
IZU^ENIE WOPROSA O TOM, L@BAQ LI TRAEKTORIQ SISTEMY (5), WYHODQ]AQ IZ NA^ALXNOJ TO^KI, NE LEVA]EJ NI NA ODNOM IZ MNOGOOBRAZIJ = 0, = 0, = 0, BUDET
STREMITXSQ K MNOGOOBRAZI@ = 0.
rAZUMEETSQ, DAVE W RAMKAH RASSMATRIWAEMOJ MODELI SLEDUET RAZLI^ATX MATEMATI^ESKOE I BIOLOGI^ESKOE WYVIWANIE. rAZLI^IE ZAKL@^AETSQ W TOM, ^TO DLQ BIOLOGI^ESKOGO IS^EZNOWENIQ POPULQCII SOWSEM NEOBQZATELXNO, ^TOBY EE ^ISLENNOSTX
STREMILASX K NUL@ S TE^ENIEM WREMENI. wPOLNE DOSTATO^NO TOGO, ^TOBY ^ISLENNOSTX
POPULQCII OKAZALASX MENXE NEKOTOROGO KRITI^ESKOGO UROWNQ. zDESX MY BUDEM WSEGDA POMNITX OB \TOM RAZLI^II.
pREVDE WSEGO ZAMETIM, ^TO OKTANT 3+ MOVNO RAZBITX NA 7 OBLASTEJ TIPA xs \
ys \ zs , W KAVDOJ IZ KOTORYH SOHRANQETSQ SPOSOB STREMLENIQ TRAEKTORII SISTEMY (5) K INWARIANTNYM MNOGOOBRAZIQM = 0, = 0, = 0. nAPRIMER, W OBLASTI
xs \ ys \ zs TRAEKTORIQ SISTEMY (5) DOLVNA PRIBLIVATXSQ K KAVDOMU IZ MNOGOOBRAZIJ = 0, = 0, = 0 DO TEH POR, POKA NE WYJDET IZ \TOJ OBLASTI.
nA RIS. 4 PRIWEDENY IZOBRAVENIQ WSEH \TIH SEMI OBLASTEJ.
pOWEDENIE TRAEKTORIJ SISTEMY (5) OPREDELQ@T SLEDU@]IE OBSTOQTELXSTWA. wOPERWYH, SISTEMA (5) QWLQETSQ SINGULQRNO-WOZMU]ENNOJ SISTEMOJ DIFFERENCIALXNYH
URAWNENIJ. oTS@DA SLEDUET, ^TO L@BAQ TRAEKTORIQ SISTEMY (5) BUDET PRIBLIVATXSQ
K MNOGOOBRAZI@ = 0 (ILI UDALQTXSQ OT NEGO) NAMNOGO BYSTREE, ^EM K DWUM (ILI OT
DWUH) OSTALXNYM MNOGOOBRAZIQM.
wO-WTORYH, RAWNOWESNYE SOSTOQNIQ SISTEM, OPISYWA@]IH DWIVENIQ SISTEMY (5)
PO MNOGOOBRAZIQM = 0 I = 0 (TO ESTX SISTEM (8) I (10)), LEVAT, W OSNOWNOM, W
OBLASTQH OTTALKIWANIQ \TIH MNOGOOBRAZIJ. eSLI PREDELXNYJ CIKL SISTEMY (8) I
WYHODIT IZ OBLASTI OTTALKIWANIQ, TO TOLXKO SWOEJ NEBOLXOJ ^ASTX@.
w-TRETXIH, RAWNOWESNOE SOSTOQNIE SISTEMY (6), OPISYWA@]EJ DWIVENIE PO MNOGOOBRAZI@ = 0 SISTEMY (5), LEVIT, W OSNOWNOM, W OBLASTI PRITQVENIQ \TOGO MNOGOOBRAZIQ. eSLI PREDELXNYJ CIKL SISTEMY (6) I WYHODIT IZ OBLASTI PRITQVENIQ,
TO TOLXKO SWOEJ NEBOLXOJ ^ASTX@.
w-^ETWERTYH, SISTEMA (5) NE IMEET POLOVENIQ RAWNOWESIQ, NE LEVA]EGO NA MNOGOOBRAZIQH = 0, = 0 I = 0.
R
x
y
z
y
R
y
x
y
R
:::
x
x
y
z
y
x
z
y
x
y
z
y
z
y
z
18
;
s w bOGATYREW
.
.
rIS. 4: iZOBRAVENIE OBLASTEJ PRITQVENIQ I OTTALKIWANIQ INWARIANTNYH MNOGOOBRAZIJ
x = 0, y = 0 I z = 0 DLQ
SISTEMY (5)
pREVDE WSEGO OTS@DA SLEDUET, ^TO L@BAQ TRAEKTORIQ SISTEMY (5) DLQ WSEH DOSTATO^NO BOLXIH ZNA^ENIJ WREMENI BUDET UDALQTXSQ OT MNOGOOBRAZIJ = 0 I
z
t
= 0.
x
w SAMOM DELE, PREDPOLOVIM, ^TO TRAEKTORIQ ( ( ) ( ) ( )) OKAZALASX W OBLASTI
PRITQGIWANIQ MNOGOOBRAZIQ = 0, W DOSTATO^NOJ BLIZOSTI OT NEGO, TO ESTX W OBLASTI xu \ yu \ zs . tOGDA \TA TRAEKTORIQ DOLVNA WESTI SEBQ W SOOTWETSTWII S
OSOBENNOSTQMI POWEDENIQ SISTEMY (5) NA MNOGOOBRAZII = 0, TO ESTX ONA DOLVNA
STREMITXSQ K POLOVENI@ RAWNOWESIQ SISTEMY (10). nO POSKOLXKU POLOVENIE RAWNOWESIQ SISTEMY (10) LEVIT W OBLASTI OTTALKIWANIQ zu MNOGOOBRAZIQ = 0, TO
TRAEKTORIQ ( ( ) ( ) ( )) WYJDET IZ OBLASTI xu \ yu \ zs I OKAVETSQ W OBLASTI
xu \ yu \ zu. |TA OBLASTX QWLQETSQ OBLASTX@ OTTALKIWANIQ DLQ WSEH TREH MNOGOOBRAZIJ = 0, = 0 I = 0. oT MNOGOOBRAZIQ = 0 TRAEKTORIQ BUDET UDALQTXSQ
NAMNOGO BYSTREE, ^EM OT MNOGOOBRAZIJ = 0 I = 0, PO\TOMU ONA BYSTRO OKAVETSQ
W OBLASTI xu \ ys \ zu. pOSLE \TOGO TRAEKTORIQ NA^NET BYSTRO PRIBLIVATXSQ K
MNOGOOBRAZI@ = 0 I OKAVETSQ WBLIZI NEGO LIBO W OBLASTI xu \ ys \ zu , LIBO W OBLASTI xu \ ys \ zs . w PERWOM SLU^AE TRAEKTORIQ NA^NET SEBQ WESTI W SOOTWESTWII
S OSOBENNOSTQMI POWEDENIQ SISTEMY (6), TO ESTX BUDET STREMITXSQ K USTOJ^IWOMU
PREDELXNOMU CIKLU \TOJ SISTEMY, LEVA]EMU NA POWERHNOSTI = 0. wO WTOROM SLU^AE ONA BUDET PRITQGIWATXSQ NE TOLXKO K PLOSKOSTI = 0, NO I K PLOSKOSTI = 0
I MOVET POPASTX W OBLASTX xu \ yu \ zs RANXE, ^EM OKAVETSQ W NEPOSREDSTWENNOJ BLIZOSTI OT POWERHNOSTI = 0. w \TOM POSLEDNEM SLU^AE TRAEKTORIQ DOLVNA
BUDET POWTORITX UVE PROJDENNYJ PUTX, NO POSKOLXKU WSE \TO WREMQ ONA NAHODILASX
W OBLASTI xu, TO \TOT PUTX BUDET PRODELAN NA BOLXEM RASSTOQNII OT POWERHNOSTI
= 0. pOSKOLXKU OBLASTX zs OGRANI^ENA PO NAPRAWLENI@ , TO RANO ILI POZDNO
TRAEKTORIQ PERESTANET POPADATX W OBLASTX xu \ ys \ zs .
pREDPOLOVIM TEPERX, ^TO TRAEKTORIQ ( ( ) ( ) ( )) OKAZALASX W OBLASTI PRITQVENIQ MNOGOOBRAZIQ = 0 W DOSTATO^NOJ BLIZOSTI OT NEGO, TO ESTX W OBLASTI
xs \ ys \ zs ILI W OBLASTI xs \ ys \ zu . tOGDA \TA TRAEKTORIQ DOLVNA WESTI
SEBQ W SOOTWETSTWII S OSOBENNOSTQMI POWEDENIQ SISTEMY (5) NA MNOGOOBRAZII = 0,
TO ESTX ONA DOLVNA STREMITXSQ K RAWNOWESNOMU SOSTOQNI@ SISTEMY (8). pOSKOLXKU
x t y t z t
z
z
z
x t y t z t
x
y
z
y
x
z
y
y
y
z
y
x
Ox
x t y t z t
x
x
19
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
RAWNOWESNOE SOSTOQNIE (POLOVENIE RAWNOWESIQ, ILI PREDELXNYJ CIKL) SISTEMY (8)
NAHODITSQ W OBLASTI OTTALKIWANIQ MNOGOOBRAZIQ = 0, TO TRAEKTORIQ SKORO OKAVETSQ W OBLASTI xu \ ys. pOSLE \TOGO ONA BYSTRO PRIBLIZITSQ K MNOGOOBRAZI@
= 0. tO OBSTOQTELXSTWO, ^TO PREDELXNYJ CIKL SISTEMY (8) MOVET WYHODITX NEBOLXOJ ^ASTX@ ZA PREDELY OBLASTI OTTALKIWANIQ MNOGOOBRAZIQ = 0, NE O^ENX
WAVNO, POSKOLXKU PRI DWIVENII WDOLX PREDELXNOGO CIKLA TRAEKTORIQ UDALITSQ OT
MNOGOOBRAZIQ = 0 NA BOLXEE RASSTOQNIE, ^EM PRIBLIZITSQ K NEMU.
aNALOGI^NYM OBRAZOM MOVNO PROANALIZIROWATX OSTALXNYE WOZMOVNYE SITUACII.
w L@BOJ IZ \TIH SITUACIJ TRAEKTORIQ SISTEMY (5) ^EREZ NEKOTOROE WREMQ OKAVETSQ
WBLIZI MNOGOOBRAZIQ = 0.
x
y
x
;
x
y
rIS. 5: iZOBRAVENIE NEKOTORYH FAZOWYH TRAEKTORIJ SISTEMY (5)
nA RIS. 5 PRIWODITSQ IZOBRAVENIE NEKOTORYH TRAEKTORIJ SISTEMY (5). wO WSEH
SLU^AQH TRAEKTORIQ WYPUSKALASX IZ NA^ALXNOJ TO^KI S MALYM ZNA^ENIEM PO PEREMENNOJ , TO ESTX PRI NIZKOJ ^ISLENNOSTI HI]NIKA. iZ PRIWEDENNOGO RISUNKA WIDNO, ^TO
W L@BOM SLU^AE ^EREZ NEKOTOROE WREMQ TRAEKTORIQ OKAZYWAETSQ W NEPOSREDSTWENNOJ
BLIZOSTI OT MNOGOOBRAZIQ = 0 I POSLE \TOGO NA^INAET DWIGATXSQ WDOLX PREDELXNOGO CIKLA SISTEMY (6). kROME FAZOWYH TRAEKTORIJ SISTEMY (5), NA RIS. 5 PRIWODQTSQ
IZOBRAVENIQ PREDELXNYH CIKLOW SISTEM (6) I (8) I SLEDY OBLASTEJ PRITQVENIQ I
OTTALKIWANIQ DLQ WSEH TREH MNOGOOBRAZIJ = 0, = 0 I = 0.
tAKIM OBRAZOM, W L@BOM SLU^AE S MATEMATI^ESKOJ TO^KI ZRENIQ POPULQCIQ NE
WYVIWAET. pRAWDA \TO NE OZNA^AET, ^TO S BIOLOGI^ESKOJ TO^KI ZRENIQ U NEE SOWSEM
NET NIKAKIH ANSOW WYVITX. eSLI TRAEKTORIQ ( ( ) ( ) ( )) PODOJDET, NAPRIMER,
NASTOLXKO BLIZKO K PLOSKOSTI = 0, ^TO PRI \TOM ^ISLENNOSTX POPULQCII HI]NIKA OKAVETSQ MENXE NEKOTOROGO KRITI^ESKOGO UROWNQ, NEOBHODIMOGO DLQ WYVIWANIQ POPULQCII, TO MOVET IS^EZNUTX POPULQCIQ HI]NIKA. tO^NO TAKVE TRAEKTORIQ
( ( ) ( ) ( )) MOVET OKAZATXSQ W TAKOJ BLIZOSTI OT PLOSKOSTI = 0, ^TO PRI \TOM
NE WYVIWET POPULQCIQ WTOROGO WIDA VERTWY. wPRO^EM OBE \TI WOZMOVNOSTI MALOREALXNY.
z
y
x
y
z
y
x t y t z t
z
x t y t z t
x
20
s w bOGATYREW
.
.
7. mODELX "HI]NIK { DWE VERTWY S PEREKL@^ENIEM"
dOBAWIM TEPERX K MODELI (5) MEHANIZM PEREKL@^ENIQ HI]NIKA S DWUH WIDOW
VERTW NA ODNU TAK, KAK BYLO OPISANO WO WWEDENII. pUSTX = QWLQETSQ KRITI^ESKIM UROWNEM ^ISLENNOSTI PLOHO PRISPOSOBLENNOGO WIDA VERTWY, PRI KOTOROM
PROISHODIT PEREKL@^ENIE HI]NIKA NA ZAPASNOJ WID. tOGDA PRI
MODELX BUDET
OPISYWATXSQ SISTEMOJ (5), A PRI
SISTEMOJ
_ = ( 1 ; 11( ) ; 12 ; )
_ = ( 2 ; 21 ; 22( ))
(12)
_ = (; 3 + )
oB_EDINQQ SISTEMY (5) I (12) WMESTE, POLU^IM SLEDU@]U@ MODELX S MEHANIZMOM
PEREKL@^ENIQ, PRIGODNU@ SRAZU WO WSEJ OBLASTI 3+ :
_ = ( 1 ; 11( ) ; 12 ; )
_ = ; 12 + ( 2 ; 21 ; 22( )) ; 12 sign( ; )
(13)
1
1
_ = (; 3 + ) + 2 + 2 sign( ; )
y
y
y > y
y < y
x
x k
y
y k
z
z
k
x
x
y
z y
dx :
R
x
x k
y
z
z
x
y
yz
y k
k
dx
dzy
z x
y
yz
dzy
y
y
y
y
:
sISTEMA (13) QWLQETSQ SISTEMOJ S RAZRYWNOJ PRAWOJ ^ASTX@, PRI^EM POWERHNOSTX@
RAZRYWA DLQ NEE BUDET PLOSKOSTX = .
oSNOWNYE REZULXTATY PO TEORII SISTEM S RAZRYWNOJ PRAWOJ ^ASTX@ MOVNO NAJTI
W RABOTE 31]. iZWESTNO, ^TO POWERHNOSTX RAZRYWA = f = g RAZDELQETSQ NA
OBLASTX PROKALYWANIQ pass I OBLASTX SKOLXVENIQ slide. oBLASTX PROKALYWANIQ
SOSTOIT IZ TO^EK (
) POLOVITELXNOGO OKTANTA , UDOWLETWORQ@]IH SISTEME
NERAWENSTW
( 2 ; 21 ; 22( ))
( 2 ; 21 ; 22( ))
+
;
ILI
pass =
pass =
;
;
(
)
0
) 0
2
21
22
2 ; 21 ; 22(
zNA^OK + OZNA^AET, ^TO TRAEKTORII SISTEMY (13) PROKALYWA@T PLOSKOSTX RAZRYWA
= W POLOVITELXNOM NAPRAWLENII OSI , A DLQ ZNA^KA ; NAPRAWLENIE PROKALYWANIQ QWLQETSQ OTRICATELXNYM NAPRAWLENIEM OSI .
oBLASTX SKOLXVENIQ SOSTOIT IZ TO^EK TO^EK (
) POLOVITELXNOGO OKTANTA ,
UDOWLETWORQ@]IH SISTEME NERAWENSTW
( 2 ; 21 ; 22( ))
( 2 ; 21 ; 22( ))
s
u
ILI
slide =
slide =
)
0
) 0
;
;
(
2
21
22
2 ; 21 ; 22(
u QWLQETSQ EE NEUSTOJ^IWOJ ^ASTX@, A s { USTOJ^IWOJ
dLQ OBLASTI SKOLXVENIQ slide
slide
^ASTX@.
uRAWNENIQ, OPISYWA@]IE DWIVENIE PO OBLASTI SKOLXVENIQ POWERHNOSTI RAZRYWA
MOVNO NAJTI, NAPRIMER, S POMO]X@ METODA \KWIWALENTNOGO UPRAWLENIQ 31,32]
_ = ( 1 ; 11( ) ; ) ; 12
(14)
_ = (; 3 + ) + ( 2 ; 21 ; 22( ))
nAPOMNIM, ^TO CELX@ RABOTY QWLQETSQ ISSLEDOWANIE WOPROSA O WYVIWANII PLOHO
PRISPOSOBLENNOJ POPULQCII. w PREDYDU]EM RAZDELE MY UBEDILISX W TOM, ^TO TAKAQ
POPULQCIQ NE WYVIWAET W OBY^NOJ SITUACII. w \TOM RAZDELE MY DOBAWILI K MODELI
y
y
S
S
y
y
S
x y z
k
S
y
k
x
x
y
y
> z
>
y
k
S
k
x
x
y
y
< z
<
:
Oy
Oy
x y z
S
k
k
x
x
y
y
> z
<
k
S
k
S
x
x k
z
z
x
x
S
k
x
dx
z
dy
k
y x
x
y
:
y
y
< z
>
:
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
21
MEHANIZM PEREKL@^ENIQ I SOBIRAEMSQ RASSMOTRETX WOPROS O TOM, POMOVET LI \TO
PLOHO PRISPOSOBLENNOJ POPULQCII WYVITX.
nA RIS. 6 PRIWEDENO IZOBRAVENIE TIPI^NOGO RASPOLOVENIQ OBLASTEJ PROKALYWANIQ I SKOLXVENIQ. wIDNO, ^TO PO NAPRAWLENI@ OBLASTX SKOLXVENIQ OGRANI^ENA,
A PO NAPRAWLENI@ { NEOGRANI^ENA. tAKIM OBRAZOM, ESLI NA^ALXNOE SOSTOQNIE 0
NE SLIKOM WELIKO, TO PRI L@BOM NA^ALXNOM SOSTOQNII 0 TRAEKTORIQ SISTEMY (13)
POPADET W OBLASTX SKOLXVENIQ POWERHNOSTI RAZRYWA.
uRAWNENIQ DWIVENIQ (14) PO POWERHNOSTI RAZRYWA OTLI^A@TSQ OT URAWNENIJ (6),
OPISYWA@]IH \KOSISTEMU "HI]NIK { OBY^NAQ VERTWA", TOLXKO MALYM WOZMU]ENIEM
PRAWOJ ^ASTI. pO\TOMU I RAWNOWESNYE DWIVENIQ SISTEMY (14) DOLVNY BYTX BLIZKI
K SOOTWETSTWU@]IM RAWNOWESNYM DWIVENIQM SISTEMY (6). lEGKO WIDETX, ^TO SISTEMA (14) IMEET LIBO USTOJ^IWOE POLOVENIE RAWNOWESIQ, LIBO { USTOJ^IWYJ PERIODI^ESKIJ CIKL, KOTORYE BUDUT CELIKOM LEVATX W OBLASTI SKOLXVENIQ. pO\TOMU, ESLI
TRAEKTORIQ SISTEMY (13) POPADET W OBLASTX SKOLXVENIQ, TO ONA NIKOGDA NE POKINET
\TU OBLASTX. (nA RIS. 6 PRIWEDENO IZOBRAVENIE IZOKLIN SISTEMY (14) I PREDELXNOGO
CIKLA.)
Ox
Oz
x
z
;
rIS. 6: iZOBRAVENIE OBLASTI SKOLXVENIQ I OBLASTEJ PROKALYWANIQ SISTEMY (13), IZOBRAVENIE IZOKLIN I PREDELXNOGO CIKLA SISTEMY (14) NA POWERHNOSTI RAZRYWA y = y
dLQ RASSMATRIWAEMOJ \KOSISTEMY \TOT REZULXTAT OZNA^AET SLEDU@]EE. eSLI ^ISLENNOSTX VERTWY NE SLIKOM WELIKA, TO PRI L@BOJ ^ISLENNOSTI POPULQCII HI]NIKA ^ISLENNOSTX PLOHO PRISPOSOBLENNOJ POPULQCII UMENXAETSQ TOLXKO DO KRITI^ESKOGO ZNA^ENIQ . dALXE ^ISLENNOSTX BUDET SOHRANQTXSQ NA ODNOM I TOM VE
UROWNE, A ^ISLENNOSTI I POPULQCIJ ZAPASNOGO WIDA VERTWY I HI]NIKA LIBO BUDUT
OSTAWATXSQ STABILXNYMI, LIBO BUDUT IZMENQTXSQ PERIODI^ESKIM OBRAZOM.
eSLI NA^ALXNOE SOSTOQNIE 0 DOSTATO^NO WELIKO, TO TRAEKTORIQ SISTEMY (13) POPADET W OBLASTX PROKALYWANIQ NA POWERHNOSTI RAZRYWA. w \TOM SLU^AE ZNA^ENIE ( )
BUDET PRODOLVATX UMENXATXSQ. nO, KAK POKAZYWAET STRUKTURA OBLASTEJ, W KOTORYH
PRAWYE ^ASTI SISTEMY (12) SOHRANQ@T SWOJ ZNAK, ^EREZ NEKOTOROE WREMQ TRAEKTORIQ
SISTEMY (13) POPADAET W OBLASTX, GDE ZNA^ENIE SNOWA NA^NET WOZRASTATX. tAKAQ
TRAEKTORIQ POPADAET NA POWERHNOSTX RAZRYWA W OBLASTX SKOLXVENIQ I OSTAETSQ NA
NEJ NAWSEGDA.
x
z
y
y
y
x
z
x
y t
y
22
s w bOGATYREW
.
.
tAKIM OBRAZOM, S MATEMATI^ESKOJ TO^KI ZRENIQ WSE TRAEKTORII SISTEMY (13) ZAKAN^IWA@T SWOJ PUTX NA POWERHNOSTI RAZRYWA W OBLASTI USTOJ^IWOGO SKOLXVENIQ.
|TO OZNA^AET, ^TO POPULQCIQ PLOHO PRISPOSOBLENNOJ VERTWY DOLVNA WYVITX. nO,
KAK MY UVE OTME^ALI RANXE, MEVDU MATEMATI^ESKIM I BIOLOGI^ESKIM WYVIWANIEM IMEETSQ NEKOTOROE RAZLI^IE. sREDI TRAEKTORIJ SISTEMY (13) IME@TSQ TAKIE,
KOTORYE PODHODQT O^ENX BLIZKO K PLOSKOSTI = 0. dLQ POPULQCII \TO OZNA^AET,
^TO EE ^ISLENNOSTX MOVET STATX MENXE KRITI^ESKOJ, ^TO W SWO@ O^EREDX PRIWEDET
K EE IS^EZNOWENI@.
y
lITERATURA
y
1] bERGR\D a.t. sMENA VERTWY W PROSTOJ \KOSISTEME // w MIRE NAUKI. 1984. 2.
s. 64-73.
2] iWLEW w.s. |KSPERIMENTALXNAQ \KOLOGIQ PITANIQ RYB // m.: pI]EPROMIZDAT.
1955. 252 S.
3] nIKULINA w.n. oPYT OCENKI WLIQNIQ ZOOPLANKTONA NA FITOPLANKTON OLIGOTROFNOGO OZERA // |KOLOGIQ. 1977. 1. s. 55{64.
4] Akre w.G. Johnson D.m. Switching and signoid functional response curves by
dameselfy naiads with alternative prey available // J. Animal. Ecol. 1979. V. 48. 3. P. 703{720.
5] Forst w.W. A threshold feeding behaviour in Calanus pacicus // Limnol. and
Oceanogr. 1975. V. 20. 2. P. 263{266.
6] Holling s.S. The functional response of predators to prey density and its role in
mimicry and population regulation // Mem. Ent. Soc. Can. 1965. V. 45. P. 1{60.
7] Lawton J.N., Beddington J., Binser R. Switching in invertebrate predators //
Chapman and Hall. 1974. P. 141{158.
8] Murdoch W.W. Switching in general predators: experiments on predator specicity
and stability of prey populations // Ecol. Monogr. 1969. V. 39. 4. P. 335{354.
9] Murdoch W.W. Predation and the dynamics of prey populations // Fortschr. Zool.
1979. V. 25. 2{3. P. 295{310.
10] Murdoch W.W., Avery S., Smyth m.e.w. Switching in predatory sh // Ecology
1975. V. 56. 5. P. 1094{1105.
11] Mullin m.m., Stewart e.F., Fuglister F.J. Ingestion by planktonic grazers as a
function of concentration of food // Limnol. and Oceanogr. 1975. V. 20. 2. P.
259{262.
12] sWIREVEW `.m., lOGOFET d.o. uSTOJ^IWOSTX BIOLOGI^ESKIH SOOB]ESTW // m.:
nAUKA. 1978. 352 S.
13] sWIREVEW `.m. nELINEJNYE WOLNY, DISSIPATIWNYE STRUKTURY I KATASTROFY
W \KOLOGII // m.:nAUKA. 1987. 368 S.
14] bAZYKIN a.d. mATEMATI^ESKAQ BIOFIZIKA WZAIMODEJSTWU@]IH POPULQCIJ //
m.: nAUKA. 1985.
15] bIGON m., hARPER dV., tAUNDSEND k. |KOLOGIQ. oSOBI, POPULQCII I SOOB]ESTWA.
w 2 T. // m.:mIR. 1989. t.1. 667 S.
16] kOLESOW `.s., mAJOROW w.w. rOLX \KOLOGI^ESKOJ LOWUKI W STABILIZACII BIOLOGI^ESKOGO SOOB]ESTWA O.nX@FAUNDLEND // nELINEJNYE KOLEBANIQ W ZADA^AH
\KOLOGII. qROSLAWLX: qRgu, 1985. s. 93-102.
17] kOLESOW a.`., kOLESOW `.s. rELAKSACIONNYE KOLEBANIQ W MATEMATI^ESKIH MODELQH \KOLOGII // tR. miran. m.: nAUKA, 1993. t. 199. 125 S.
mATEMATI^ESKAQ MODELX \KOLOGI^ESKOJ LOWUKI
23
18] kOLMOGOROW a.n. kA^ESTWENNOE IZU^ENIE MATEMATI^ESKIH MODELEJ POPULQCIJ
// pROBLEMY KIBERNETIKI. wYP. 25. m.:nAUKA, 1972. s. 100{106.
19] Rosenzweig M.L., MacArthur R.H. Graphical representation and stability conditions
of predator-prey interactions // Amer. Natur. 1963. V. 97. 893. P. 209{223.
20] Freedman H.I. Graphical stability, enrichment and pest control by a natural enemy
// Math. Biosci. 1976. V. 31. 3-4. P. 207-225.
21] pIANKA |. |WOL@CIONNAQ \KOLOGIQ // m.:mIR, 1981. 400 S.
22] Moreira H.N., Wang Y. Global stability in a class of competitive cubic system //
Ecological modelling. 1997. V. 102. P. 273{285.
23] Stephens D.W., Krebs J.R. Foraging theory // NJ:Princeton Univ. Press. 1986.
24] Charnov E.L. Optimal foraging, the marginal value theorem // Theor. Popul. Biol.
1976. V. 9. C. 129{136.
25] Krivan E. Optimal foraging and predator{prey dinamics // Theor. Popul. Biol. 1996.
V. 49. C. 265{290.
26] Krivan E., Sikder A. Optimal foraging and predator{prey dinamics, II // Theor.
Popul. Biol. 1999. V. 55. C. 111{126.
27] jOSS v., dVOZEF d. |LEMENTARNAQ TEORIQ USTOJ^IWOSTI I BIFURKACIJ // m.:
mIR, 1983. 301 S.
28] wASILXEWA a.b., bUTUZOW w.f. aSIMPTOTI^ESKIE METODY W TEORII SINGULQRNYH
WOZMU]ENIJ // m.:wYS. K., 1990. 208 S.
29] mITROPOLXSKIJ `.a., lYKOWA o.b. iNTEGRALXNYE MNOGOOBRAZIQ W NELINEJNOJ
MEHANIKE // m.:nAUKA, 1973. 512 S.
30] sTRYGIN w.w., sOBOLEW w.a. rAZDELENIE DWIVENIJ METODOM INTEGRALXNYH MNOGOOBRAZIJ // m.:nAUKA, 1988. 256 S.
31] fILIPPOW a.f. dIFFERENCIALXNYE URAWNENIQ S RAZRYWNOJ PRAWOJ ^ASTX@ //
m.:nAUKA, 1985. 224 S.
32] uTKIN w.i. sKOLXZQ]IE REVIMY W ZADA^AH OPTIMIZACII I UPRAWLENIQ //
m.:nAUKA, 1981.
MATHEMATICAL MODEL OF ECOLOGICAL TRAP
S.Bogatyrev2
The simple ecological model, which describes interaction of three populations
a predator { two prey, is designed and investigated. We assume, that one prey
is adapted to protection against a predator much worse another. The model is
described by the singularly-perturbed system of the dierential equations. We shall
show, that in a usual situation the badly adapted prey is doomed on extinction. If
to enter the mechanism of switching of a predator on spare kind of a prey, the badly
adapted prey will survive.
2
Sergei Bogatyrev, departament of mathematics, Samara state university