Нелинейная локация - Специальная Техника
реклама

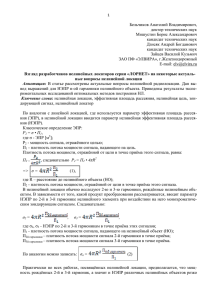
Семенов Дмитрий Владимирович, аспирант МГТУ им. Н.Э.Баумана Ткачев Дмитрий Викторович НЕЛИНЕЙНАЯ РАДИОЛОКАЦИЯ: КОНЦЕПЦИЯ “NR”. Последние 6-7 лет Россия переживает настоящий бум в области разработки нелинейных радиолокаторов (НРЛ). За это время потребителю было представлено больше десяти (!) различных моделей: “Циклон”, “Октава”, “Люкс”, “Онега 2”, “NR900E”, “NR900M”, “NR900Н”, “Онега 3М”, “Энвис”, “Переход”, “Родник-2”, “Родник 23”, “Обь”, “Обь 2С”… Причина такого многообразия в уникальных потребительских качеств НРЛ - это очень эффективная, универсальная и простая в эксплуатации поисковая аппаратура. НРЛ - своего рода индикатор полупроводниковых приборов: он позволяет обнаружить нелегально размещенные радиоэлектронные устройства любого назначения, причем как работающие, так и “спящие”. Высокая гарантия обнаружения посторонних радиоэлектронных объектов локационными методами привела к созданию большой номенклатуры приборов, предназначенных для обследования помещений в различных ситуациях. Предлагаемые изделия имеют различные технические характеристики своих составных частей, что приводит к различиям в конечной их эффективности по обнаружительной способности. Специалистам по аппаратурному обследованию помещений необходимо знать физику явлений, определяющих эффективность нелинейной локации, а также особенности основных режимов работы НРЛ. ПОЛУПРОВОДНИКИ: НАСТОЯЩИЕ И ЛОЖНЫЕ. В отличие от классической (линейной) – в нелинейной радиолокации информация об обнаруживаемом объекте определяется его способностью спектрального преобразования зондирующего сигнала и переотражения его на гармониках частоты зондирования. Эти явления возможны при наличии в составе объекта элементов с нелинейными вольтамперными характеристиками (ВАХ). Такие элементы по природе своего возникновения условно могут быть разделены на “настоящие” и “ложные”. Под “настоящими” будем понимать полупроводниковые приборы искусственного происхождения, содержащие p-n переход (например, диоды, транзисторы и т.п.). Для краткости назовем их “настоящими” полупроводниками. Именно “настоящие” полупроводники являются объектом интереса при поиске. ВАХ p-n перехода описывается экспоненциальной функцией [1]. Если рассчитать кратные спектральные составляющие тока через элемент с такой ВАХ в зависимости от амплитуды – U , приложенного синусоидального напряжения, то m можно показать, что при значениях U m меньше нескольких десятков милливольт они будут представлены главным образом второй гармоникой. При увеличении U m будут стремительно расти амплитуды высших гармоник. В работе [2] приводятся результаты экспериментальных исследований нелинейного рассеяния зондирующего сигнала “настоящими” полупроводниками. Показано, что зависимость мощности второй гармоники в приемной антенне НРЛ – P от плотности потока мощности зондирующего сигнала – П , при фиксированном расстоянии R, имеет вид t представленный на рис. 1. Рис. 1 Характер экспериментальной зависимости Р (П ) r2 t На этом графике выделено три области: 1 – область слабого взаимодействия Р r2 ~П , t2 2 – область сильного взаимодействия P ~ П , r t 3 – область насыщения P =const. r2 Эта зависимость является характеристикой эффективности нелинейного рассеяния. Ее вид для разных “настоящих” r2 Эта зависимость является характеристикой эффективности нелинейного рассеяния. Ее вид для разных “настоящих” полупроводников, как правило, сохраняется, а численные значения в каждом случае разные. Если проследить физические процессы, происходящие при работе НРЛ, то для области слабого взаимодействия и случая свободного пространства можно получить следующее выражение, устанавливающее связь между основными параметрами НРЛ, расстоянием и мощностью в приемной антенне на частоте второй гармоники где P – мощность зондирующего сигнала на входе передающей антенны, t G – коэффициент усиления передающей антенны, t S эф. – эффективная площадь приемной антенны НРЛ. Эффективность выявления радиоэлектронных устройств по признаку наличия нелинейных элементов определяется не только техническими параметрами аппаратуры, но и свойствами обследуемого объекта – перекрытия, стены, мебель и т.п. Практика применения НРЛ показала, что отклики на гармониках сигнала облучения создаются не только специальными полупроводниковыми приборами, но и различными металлическими элементами конструкций, которые контактируют между собой. Наиболее типичными структурами, создающими помехи, являются металлический каркас и арматура железобетонных зданий, металлические конструкции оконных и дверных коробок, арматура подвесных потолков и пр. Образующиеся нелинейные элементы выявляются НЛР аналогично “настоящим” полупроводникам. Нелинейные элементы, образованные в результате механического контакта металлических поверхностей через тонкую пленку окисла по аналогии, условно, назовем “ложными” (контактными, коррозийными) полупроводниками. Интересующие нас свойства “ложных” полупроводников наиболее полно изложены в работе [3]. При достаточно малой толщине окисной пленки (менее десятков A) основным механизмом переноса носителей через контакт является туннельный эффект. При небольших напряжениях (менее 1 В) и одинаковых металлах, ВАХ контакта можно аппроксимировать полиномом третьей степени. При напряжении на контакте более ~ 1,5 В ВАХ становится более крутой, а при дальнейшем увеличении – неустойчивой и в большинстве случаев наступает необратимый пробой контакта. Существенной особенностью ВАХ контактных полупроводников является ее неустойчивость при механическом воздействии (изменении давления на контакт). Указанная аппроксимация ВАХ означает, что в спектре отраженного сигнала будет преобладать третья гармоника. Характер зависимости мощности рассеянного сигнала (на третьей гармонике) на входе приемника НРЛ – Р при r3 фиксированном расстоянии аналогичен показанному на рис. 1 с той разницей, что в области слабого взаимодействия показатель степени плотности потока мощности П равен трем: Р 3 ~П . показатель степени плотности потока мощности П равен трем: Р t r3 3 t ~П . При нелинейном рассеянии зондирующего сигнала зависимость мощности сигнала гармоник на входе приемника НРЛ – P (при R=const) от плотности потока мощности зондирующего сигнала – П имеет вид, показанный на рис. rn t 1. В области слабого взаимодействия P rn ~П n t (n – номер гармоники). ВАХ “ложных” полупроводников имеют существенную зависимость от силы давления на контакт, что определяет механическую нестабильность характеристик рассеяния. ОБНАРУЖЕНИЕ НЕЛИНЕЙНЫХ ОБЪЕКТОВ. Иногда приходится сталкиваться с мнением, что дальность обнаружения не является важной характеристикой НРЛ. Поиск все равно ведется на малой дистанции (десятки сантиметров) и ее увеличение не имеет смысла. Это ложная аргументация. На самом деле следует иметь в виду, что объекты поиска имеют существенный разброс эффективности рассеяния, которая в ряде случаев может быть крайне мала. Сравнение разных приборов по максимальной дальности обнаружения одного и того же имитатора есть ни что иное, как простейшая оценка способности того или иного НРЛ обнаруживать “цель” с меньшей или большей отражающей способностью. В условиях реальной работы и априорной неопределенности характеристик рассеяния меньшая дальность обернется пропуском объекта с малой эффективностью нелинейного преобразования. Поэтому мы считаем, что дальность обнаружения при заданном отношении сигнал/шум основная характеристика НРЛ, определяемая совокупностью его технических параметров и параметрами нелинейного объекта. Рассмотрим методику сравнительной оценки обнаружительной способности НРЛ с различными характеристиками. Будем считать, что один и тот же нелинейный объект был обнаружен двумя НРЛ на одном и том же расстоянии. При этом отношение сигнал/шум на выходе приемника первого НРЛ – q , а второго – q . Используя выражение (1) можно 1 2 записать: где G , G r1 r2 – коэффициенты усиления приемных антенн. Все НРЛ можно разделить на две большие группы, различающиеся по закону модуляции зондирующего сигнала. К первой группе следует отнести так называемые “импульсные” НРЛ (NR900E, “Циклон”, “Октава”, “Онега”… ), зондирующий сигнал которых представляет собой последовательность коротких (единицы микросекунд) радиоимпульсов с частотой следования сотни Гц (скважность Q 1000) и пиковой мощностью P – десятки … сотни n? tимп. радиоимпульсов с частотой следования сотни Гц (скважность Q n? 1000) и пиковой мощностью P tимп. – десятки … сотни Вт. Вторую группу составляют так называемые “непрерывные” НРЛ (“Обь”, “Родник”, все НРЛ зарубежного производства), зондирующий сигнал которых либо не модулирован по амплитуде, либо имеет импульсную модуляцию со скважностью Q 10. В некоторых НРЛ зарубежного производства (например, ORION) используется частотная модуляция n? зондирующего сигнала с девиацией ~ 1 кГц. Этот прием позволяет несколько увеличить развязку между приемником и передатчиком. Мощность “непрерывных” НРЛ колеблется от десятков мВт до единиц Вт. Используя выражение (2), рассмотрим конкретный пример, сравнив “непрерывный” и “импульсный” НРЛ. Совместные испытания изделий NR900E и “Родник 23” показали, что два этих совершенно разных по своим характеристикам устройства обеспечивают примерно одинаковую дальность обнаружения. Этот результат был получен для десяти различных имитаторов. Критерием измерения дальности соответствовало “загорание” одинакового количества сегментов на столбиковых индикаторах приборов q =q , соответствующих пороговым мощностям Р иР . Для 1 2 пор.1 пор.2 этого случая (2) можно переписать: В таблице 1 представлены параметры НРЛ, причем мощности передатчиков – с учетом затухания в кабелях, а значения коэффициентов усиления антенн NR900Е, имеющих круговую поляризацию, пересчитаны относительно линейного изотропного источника, т.е. уменьшены на 3 дБ. Таблица 1. “NR 900 E” Родник 23 Мощность зондирующего сигнала на входе передающей антенны, Вт. 115 1,8 Коэффициент усиления передающей антенны, раз 3 2 Коэффициент усиления приемной антенны, раз 4 6,3 -110 -145 Пороговая мощность на входе приемника 2-ой гармоники при регистрации дальности, дБВт Численный расчет дает совпадение равенства (3) с точностью не хуже 3 дБ, что укладывается в общую погрешность эксперимента и вполне достаточно для инженерных оценок. эксперимента и вполне достаточно для инженерных оценок. Как следует из приведенных зависимостей и расчетов, снижение мощности передатчика в N раз потребовало увеличения чувствительности приемника в N пропорционально N мощностью. 2 2 раз - такова специфика нелинейной радиолокации. Это означает, что возросло влияние внешних (эфирных) и внутренних (аппаратных) помех на НРЛ с меньшей Следует пояснить, что более низкая чувствительность приемников “импульсных” НРЛ объясняется необходимостью расширения их полосы пропускания, согласованной со спектром огибающей радиоимпульсов. Коэффициенты шума приемников – F “импульсного” и “непрерывного” НРЛ с хорошо подобранными параметрами, обеспечивающими как ш высокую потенциальную обнаружительную способность, так и возможность работы в “реальных” условиях, за счет наличия достаточно широких регулировок мощности и чувствительности. Бытующее мнение о том, что “импульсные” НРЛ, в отличие от “непрерывных” якобы пригодны только для работы в абсолютно пустых – “чистых” помещениях, мы считаем ошибочным поскольку оно лишено по нашему мнению каких-либо физических оснований. Согласно данным сравнительной таблицы, приведенной в [4] основные технические характеристики “импульсных” НРЛ примерно одинаковы, а следовательно, примерно одинаковы и характеристики обнаружения. Различие их потребительских качеств, на наш взгляд, определяется эргономическими параметрами: удобством работы, простотой управления, наглядностью индикации, наличием дополнительных режимов и т.п. Технические параметры изделия “Родник 23” - лучшие среди “непрерывных” НРЛ и по своим значениям приближаются к предельно реализуемым для этого класса аппаратуры. Одна из основных характеристик НРЛ – дальность обнаружения, определяется, главным образом, мощностью зондирующего сигнала (произведением Р G ). “Импульсные” НРЛ потенциально превосходят по этим параметрам t· t “непрерывные”. Попытка компенсировать уменьшение мощности зондирующего сигнала в N раз, при той же дальности обнаружения, потребует увеличения чувствительности приемника НРЛ в N ухудшается помехоустойчивость. 2 раз, при этом пропорционально СЕЛЕКЦИЯ “ЛОЖНЫХ” ПОЛУПРОВОДНИКОВ. Методики селекции “ложных” полупроводников основываются главным образом на двух физических принципах: разности уровней второй и третьей гармоник, рассеиваемых “настоящими” и “ложными” полупроводниками (для настоящих полупроводников уровень второй гармоники ~ на 20 дБ превышает уровень третьей для “ложных” – наоборот); нестабильности ВАХ “ложных” полупроводников при механическом воздействии. Эффект “замирания”, активно рекламируемой в [5] является, по нашему мнению, просто следствием первого принципа. В работе [6] критикуется принцип селекции “настоящих” и “ложных” полупроводников по разности гармоник и делается попытка доказать ненужность приемника третьей гармоники вообще. Мы разделяем мнение автора, что иногда правило “разности гармоник” не работает или работает с точностью “до наоборот”. Такая ситуация соответствует крайне высокому значению вероятности ложной тревоги и требует от оператора настоящего искусства, а от аппаратуры предоставить ему максимум информации. При механическом воздействии на “ложный” полупроводник, за счет нестабильности его ВАХ, возникает амплитудная модуляция отражаемых от него гармоник зондирующего сигнала. На слух это воспринимается, как хруст с ритмом, соответствующим ритму воздействия. Мы считаем важным качеством НРЛ возможность приема сразу на двух гармониках, хотя бы потому, что прием третьей гармоники позволяет более явно прослушать характерную модуляцию. В некоторых приемниках НРЛ, например в “Онеге”, сигнал с выхода детектора предварительно измеряется, в принципе это выгодно – можно применить накопление, а затем для звуковой индикации формируется с помощью вспомогательного генератора с амплитудой пропорциональной измеренному значению. На наш взгляд, это неудачное решение – оператор лишается возможности прослушать модуляцию. Эта возможность недоступна и оператору НРЛ “Циклон” по причине, порогового характера его выходного сигнала. Более сложной является задача селекции “настоящего” полупроводника на фоне “ложных”. Существует несколько методик решения этой проблемы, но все они предполагают достаточную линейность приемника НРЛ, обеспечивающую возможность распознавания сигналов от разных источников. На наш взгляд, динамика приемника НРЛ должна составлять по крайней мере 20 дБ, что, к сожалению, реализовано не во всех моделях. Так, например, пропустит “цель”, расположенную рядом с “ложным” объектом, НРЛ ORION, если он работает в режиме излучения непрерывного сигнала и ЧМ-детектирования, поскольку ЧМ-детектор предполагает амплитудное ограничение. В ряде практических случаев мощные импульсные НРЛ обеспечивают возможность очень эффективной “борьбы” с “ложными” полупроводниками. Для малых расстояний и точечных контактов (например, арматура, свитая проволока) энергии излучаемого сигнала оказывается достаточным для пробоя окисной пленки и разрушения нелинейного контакта. “Непрерывные” НРЛ такую возможность не обеспечивают. При селекции “ложных” полупроводников наилучшие результаты обеспечивают мощные импульсные НРЛ, обеспечивающие возможность одновременного приема второй и третьей гармоники и наглядного отображения уровней. Построение приемного тракта должно позволять оператору прослушивать характерную модуляцию, возникающую при механическом воздействии на ложный полупроводник. Динамический диапазон приемного тракта должен составлять 20…30 дБ и более. РЕЖИМ ВЫДЕЛЕНИЯ ОГИБАЮЩЕЙ. Этот режим позволяет оператору НРЛ обнаруживать радиоэлектронные устройства по признаку модуляции второй гармоники характерными для этого устройства сигналами. Дело в том, что если, например, через диод, являющийся частью схемы, протекает ток низкочастотного сигнала а(t), обусловленный работой схемы, то рассеянная этим диодом вторая гармоника зондирующего сигнала также будет промодулирована по закону а(t). Наиболее эффективно этот режим реализуется в НРЛ непрерывного действия. В “импульсных” НРЛ режим выделения огибающей требует изменения параметров модуляции зондирующего сигнала, что приводит к усложнению и удорожанию передатчика. Поэтому в простых моделях импульсных НРЛ (например, “Циклон) этого режима нет. В более совершенных импульсных НРЛ (например, “Октава”, NR900E) этот режим называется “20 К”, что объясняется увеличением частоты следования импульсов зондирующего сигнала до нескольких килогерц (скважность следования импульсов в этом режиме уменьшается Q 100, уменьшается и пиковая мощность). Отраженный сигнал представляет 20» собой как бы выборки из модулирующей функции a(t), сделанные с частотой следования зондирующих импульсов. В приемнике НРЛ они проходят через ФНЧ, и вид a(t) восстанавливается. По сравнению с “непрерывными” НРЛ проигрыш в отношении сигнал/шум (при одном и том же уровне второй гармоники на входе приемника) составляет, по крайней мере, Q раз. Режим выделения огибающей расширяет возможности НРЛ, и кроме упомянутого назначения он часто используется при селекции “ложных” полупроводников. В НРЛ ORION также есть режим “20 К” (?), что весьма удивительно для “непрерывного” локатора – переход к импульсному излучению приводит к существенному увеличению шумов. Складывается впечатление, что режим “20 К” был “подсмотрен” у одного из российских изделий, до конца не понят, но на всякий случай реализован. Режим выделения огибающей позволяет обнаруживать и идентифицировать слабоэкранированные радиоэлектронные устройства в работающем состоянии. В “непрерывных” НРЛ этот режим имеет значительно большую эффективность, чем в “импульсных”. ЗАКЛЮЧЕНИЕ. В этой статье мы изложили свое видение физических принципов, лежащих в основе функционирования НРЛ, особенностей режимов его работы, требований к его основным параметрам. Этот материал своего рода концепция – концепция нелинейных радиолокаторов серии “NR”, концепция фирмы “ИКМЦ-1” от лица которой мы выступаем. На вопрос: какой же НРЛ выбрать, какой лучше? - мы ответим: конечно “импульсный”, как обладающий рядом принципиальных преимуществ перед “непрерывным”, делающих его более универсальным и по объектам поиска и по условиям применения, о чем постарались рассказать в этой статье. условиям применения, о чем постарались рассказать в этой статье. Вопросы можно направлять по адресу stt@detektor.ru. СПИСОК ЛИТЕРАТУРЫ: 1. 2. 3. 4. 5. 6. И.П.Степаненко. Основы микроэлектроники. М. “Советское радио”, 1980. А.А.Горбачев и др. Радиотехника и электроника. 1996. Т. 41 № 5, с. 558-562. В.Б.Штейншлегер. Успехи физических наук. 1984. Т. 142, вып. 1. с. 131-145. А.А.Хорев. Способы и средства защиты информации. М.: МО РФ, 1998. – 316 с. Т.Джонс. Обзор технологии нелинейной радиолокации. Специальная техника. № 3, 1999 г. Н.С.Вернигоров. Принцип обнаружения объектов нелинейным радиолокатором. Конфидент, № 5, 1998 г.