Движение тела-точки в центральном потенциальном поле
реклама

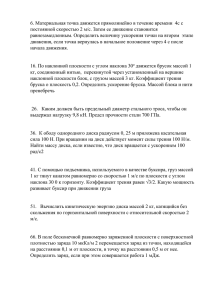
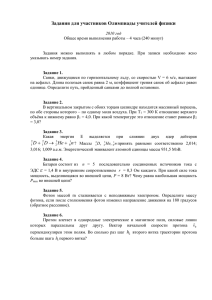
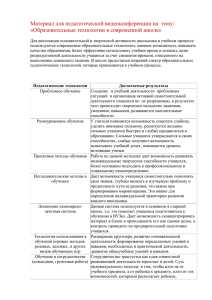
Диссертация на соискание академической степени магистра направление 010800 “Механика и математическое моделирование” Движение тела-точки в центральном потенциальном поле Выполнил: Бублий Илья Руководитель: Е. А. Иванова. д.ф.-м.н., проф. каф. ТМ СПбГПУ Актуальность и цель работы В конце 20го века П. А. Жилин ввел в рассмотрение тело-точку общего вида: 1 1 K =m v·v+Bv·ω+ Jω·ω 2 2 и показал, что траектория свободного движения такого объекта представляет собой винтовую линию и совпадает с траекторией заряженной материальной точки, движущейся в однородном магнитном поле с постоянной по модулю скоростью. - Жилин П.А. Теоретическая механика. Фундаментальные законы механики. Учеб. пособие. СПб: Изд-во СПбГПУ, 2003. 340 с. Актуальность и цель работы Известно, что материальная точка в центральном силовом поле движется в плоскости. В то же время экспериментальные данные показывают, что орбита Луны (в системе Земля - Луна) выходит из плоскости. Согласно квантово-механическим представлениям электронные орбитали атомов представляют собой пространственные области. Цель работы: исследовать задачу о движении тела-точки общего вида в центральном силовом поле (гравитационном или кулоновском), для того, чтобы проверить наличие пространственных траекторий и установить условия, при которых они возникают. Содержание 1. Постановка задачи 2. Численный анализ в зависимости от параматров задачи 3. Сравнение траектории с орбитой Луны 4. Сравнение области, заполняемой траекторией частицы, с электронной орбиталью атома водорода 5. Заключение Постановка задачи Рассмотрим систему, состоящую из неподвижного гравитационного центра и тела-точки с кинетической энергией 1 1 v·v+Bv·ω+ Jω·ω K =m 2 2 Тело-точка обладает количеством движения и собственным кинетическим моментом вида: K1 = m (v + B ω) , K2 = m (B v + J ω) , Уравнения движения частицы: dK1 = F, dt dKQ 2 =0 dt Здесь A = const и KQ 2 = K = const. KQ 2 = R × K1 + K2 Обезразмеривание системы уравнений Для численного исследования система уравнений движения тела-точки была преобразована, обезразмерена и приняла вид: ( r r00 + Ω0 = − 3 r r00 + J∗ Ω0 = Ω × r0 Здесь r, r - безразмерные вектор и модуль радиуса-вектора соответственно, Ω - безразмерная угловая скорость, штрихом обозначена производная по безразмерному времени τ . Эти величины и константа J∗ связаны с размерными параметрами выражениями: r r B3 m A J τ, R = B r, ω= Ω, J∗ = 2 t= 3 A B m B Результаты численных расчетов Ω0 , v0 , r0 взаимно ортогональны. Траектории тела-точки: Результаты численных расчетов Проекции векторов количества движения (вверху) и собственного кинетического момента (внизу) на плоскость перпендикулярную полному кинетическому моменту системы: Анализ поведения проекции количества движения на плоскость перпендикулярную полному кинетическому моменту при увеличении параметра (слева - направо) • Период одного витка, угол на который поворачивается «эллипс» после каждого витка, сжатие «эллипса» вдоль одной из его осей увеличиваются; Анализ поведения проекции вектора собственного кинетического момента на плоскость, перпендикулярную вектору полного кинетического момента, при увеличении параметра (слева - направо) Число вершин циклоиды, угол поворота витка, период витка, а также площадь, охватываемая графиком, увеличиваются. Анализ поведения орта количества движения при увеличении параметра (слева - направо) • Ширина полосы, описываемой вершиной орта на единичной сфере увеличивается Результаты численных расчетов Ω0 направлен вдоль v0 (вверху), Ω0 направлен вдоль r0 (внизу) Анализ поведения проекции радиуса-вектора на плоскость перпендикулярную полному кинетическому моменту при увеличении параметра (слева - направо) • Сжатие «эллипса», угол поворота витка, период витка, кратчайшее расстояние между «эллипсом» и центром гравитации, а также площадь охватываемая графиком увеличиваются Анализ поведения орта количества движения при увеличении параметра (слева - направо) • Угол между плоскостями соседних витков траектории конца орта и период одного витка увеличивается Анализ поведения радиуса-вектора при увеличении параметра (слева - направо) • • Угол между плоскостями соседних витков траектории, период одного витка, амплитуда колебаний модуля радиуса-вектора, сжатие тора в направлении полного кинетического момента увеличиваются Число витков, необходимое для оборота плоскости орбиты вокруг вектора полного кинетического момента уменьшается Зависимость характера траектории от параметра B n B = 10m type 2 type 3 type 4 Рис.: type 1 - эллипс, type 5 - точка улетела или упала Сравнение траектории с орбитой Луны Расчеты проводились для параметров задачи о движении Луны вокруг Земли. Дополнительный параметр B ∗ = Bm варьировался в широких пределах. При значениях B ∗ порядка 1022 кг·м траектория тела-точки напоминает колебания угла наклона плоскости орбиты Луны к плоскости эклиптики и имеет вид: -М. М. Дагаев. Солнечные и лунные затмения. Изд-во «Наука», 1978 210с. Некоторые сведения об атоме водорода • Известны энергетические характеристики. Они зависят от главного квантового числа n = 1, 2, 3, ... 1 • Спин электрона s = ± в единицах ~. 2 • Орбитальное квантовое число l = 0, 1, 2, ..., n−1. • Магнитное квантовое число m принимает значения от −l до +l включая 0. Частное решение задачи о движении тела-точки вблизи центра притяжения Рассматривается частное решение задачи, а именно случай |K1 | = const. Начальные условия должны быть такими, что: v0 · (v0 + Bω 0 ) = A , m|R0 | R0 · (v0 + Bω 0 ) = 0 В этом случае задача сводится к решению уравнения для |R|: 2 |K|2 +|K |2 −2J 2 |K |2 B d 2 |R|2 B 2 |K1 |2 2JA 1 2 1 + 2 |R|2 − = 2 2 2 2 2 2 2 dt m (J −B ) m(J −B ) |R| m (J −B ) Начальные условия: |R| t=0 = |R0 |, d|R| v0 · R0 = dt t=0 |R0 | Для частного решения доказаны следующие факты: 1. Если R0 · v0 = 0, траектория — окружность, |R| = const. Если R0 · v0 6= 0, траектория — пространственная кривая. При любых начальных условиях |R| = 6 const. 2. Пусть R0 · v0 6= 0. Введем обозначение cos β = K1 · K2 . |K1 ||K2 | Из интеграла энергии следует: 1 1 2B|K1 ||K2 | = + (cos β − cos β0 ) |R| |R0 | Am(J −B 2 ) Тогда: R1 ≤ |R| ≤ R2 где 1 1 2B|K1 ||K2 | − = . R1 R2 Am(J − B 2 ) Результаты численных расчетов Траектории тела-точки, соответствующие различным моментам времени: Параметры задачи выбраны так, чтобы траектории тела-точки находились в тонком концентрическом шаровом слое, подобном электронному облаку в атоме водорода. Результаты численных расчетов Проекции радиус-вектора R на плоскость, ортогональную вектору K, построенные в разные моменты времени: Параметры задачи и значения моментов времени — такие же, как для пространственных траекторий тела-точки. Приближенное решение для частного случая |K1 | = const: Поскольку R1 ≤ |R| ≤ R2 и начальные условия можно выбрать так, что |R2 − R1 | |R0 |, решение можно искать в форме: |R| = |R0 | 1 + ξ(t) , |ξ(t)| 1 Уравнение для ξ(t) имеет вид: d 2ξ + Ω2 ξ = 0, dt 2 Доказано: Ω2 = B 2 |K1 |2 AJ + 2 2 m (J −B ) m(J −B 2 )|R0 |3 K · K2 1 |R0 |2 |K1 |2 ξ(t) = − |K|2 +|K2 |2 −|R0 |2 |K1 |2 2 |K|2 +|K2 |2 −|R0 |2 |K1 |2 Аналог спина: K · K2 1 |K|2 +|K2 |2 −|R0 |2 |K1 |2 ≈ ± 2 Заключение • Исследованы зависимости радиуса-вектора, количества движения и собственного кинетического момента от начальных условий и параметра J∗ . Построено множество пространственных траекторий движения тела-точки вблизи центра притяжения. • Возможно движение, при котором угол наклона плоскости орбиты тела-точки к плосткости, ортогональной вектору полного кинетичего момента, совершает колебания, подобные колебаниям угла наклона плоскости орбиты Луны к плоскости эклиптики. • Существуют траектории, лежащие в сферическом слое, аналогичном электронной орбитали вокруг атома водорода в невозбужденном состоянии. Найдены параметры, регулируя которые можно менять толщину этого слоя. Спасибо за внимание! Тело-точка общего вида По определению тела-точки, его кинетическая энергия — квадратичная форма трансляционной и угловой скоростей: K =m 1 1 v·v+v·B·ω+ ω·J·ω 2 2 Важный факт. У твердого тела: B = −BT . У тела-точки общего вида: тензор B может быть произвольным! Количество движения и собственный кинетический момент: K1 = ∂K = m (v + B · ω) , ∂v Кинетический момент, вычисленный относительно опорной точки Q: K2 = ∂K = m (B · v + J · ω) ∂ω KQ 2 = (R − RQ ) × K1 + K2 Движение тела-точки вблизи центра притяжения Доказано, что задача сводится к решению системы уравнений относительно переменных |R| и |K1 |2 : 2 2 B2 B2 d 2 |R|2 3 d|K1 | − |R| + |R|2 |K1 |2 − dt 2 4A2 m2 (J − B 2 )2 dt m2 (J −B 2 )2 B 2 |K|2 +|K2 |2 +JD 2AJ 1 − = , m(J −B 2 ) |R| m2 (J −B 2 )2 2 d AJ AD 3 d|K1 | |R| + |K1 |2 = − . 2 dt dt m(J − B ) m(J − B 2 ) Константа D имеет вид: D= m2 (J − B 2 )2 |v0 |2 − B 2 |K2 |2 2Am(J − B 2 ) − J |R0 | Движение тела-точки вблизи центра притяжения После того, как найдены величины |R| и |K1 |2 , можно найти вектор K1 . Для этого надо представить K1 в полярной системе координат и воспользоваться уравнениями: Am(J −B 2 ) J|K1 |2 − D − , K1 · K1 = |K1 |2 , 2B B|R| dK1 A m2 (J −B 2 )2 d 2 |R|2 AmJ(J −B 2 )2 2 JD K · K1 × = |K| + 2 − + dt |R|3 B 2B 2 dt 2 B 2 |R| K · K1 = После того, как найден вектор K1 , можно найти векторы R, K2 , v и ω: R=− |R|3 dK1 , A dt K2 = K−R×K1 , v= JK1 −BK2 , m(J −B 2 ) ω= K2 −BK1 m(J −B 2 )