равновесие системы сочлененных тел
реклама

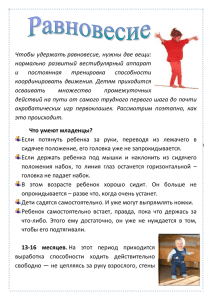
Министерство образования и науки Российской Федерации НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ Кафедра прикладной механики и математики РАВНОВЕСИЕ СИСТЕМЫ СОЧЛЕНЕННЫХ ТЕЛ Методические указания к выполнению контрольных работ по дисциплине «Теоретическая механика» для студентов бакалавриата очной формы обучения направления подготовки 08.03.01 Строительство © НИУ МГСУ, 2015 Москва 2015 УДК 531 ББК 34.41 Р13 С о с т а в и т е л ь: И.И. Ковригин Р13 Равновесие системы сочлененных тел [Электронный ресурс] : методические указания к выполнению контрольных работ по дисциплине «Теоретическая механика» для студентов бакалавриата очной формы обучения направления подготовки 08.03.01 Строительство / М-во образования и науки Рос. Федерации, Нац. исследоват. Моск. гос. строит. ун-т, каф. прикладной механики и математики ; сост. И.И. Ковригин. — Электрон. дан. и прогр. (1,35 Мб). — Москва : НИУ МГСУ, 2015. — Учебное сетевое электронное издание — Режим доступа: http://lib.mgsu.ru/Scripts/irbis64r_91/cgiirbis_64.exe?C21COM=F&I21DBN=IBIS&P21DBN=IBIS — Загл. с титул. экрана. Содержатся краткие теоретические сведения, необходимые для выполнения контрольного задания , четыре примера расчёта с подробными теоретическими пояснениями и таблица с вариантами индивидуальных контрольных заданий. Для студентов бакалавриата очной формы обучения направления подготовки 08.03.01 Строительство. Учебное сетевое электронное издание © НИУ МГСУ, 2015 2 Отв. за выпуск — прикладной механики и математики Подписано к использованию 02.09.2015 г. Уч.-изд. л. 1,97. Объем данных 1,35 Мб Федеральное государственное бюджетное образовательное учреждение высшего образования «Национальный исследовательский Московский государственный строительный университет» (НИУ МГСУ). 129337, Москва, Ярославское ш., 26. Издательство МИСИ – МГСУ. Тел. (495) 287-49-14, вн. 13-71, (499) 188-29-75, (499) 183-97-95. E-mail: ric@mgsu.ru, rio@mgsu.ru 3 Предисловие Данные методические указания и варианты контрольных заданий предназначены для самостоятельной работы студентов при изучении курса теоретической механики. Это особенно важно в настоящее время в связи с резким сокращением аудиторных часов, отводимых на изучение теоретической механики. Эти указания предназначены для более глубокого усвоения теории, излагаемой в курсе теоретической механики и, что не менее важно, научить студентов самостоятельно применять теорию к решению инженерных задач. Указания предназначены для студентов-бакалавров дневной и заочной форм обучения в МГСУ, однако они будут полезны и для студентов других форм обучения. Чтобы было удобнее пользоваться указаниями, в них даются краткие сведения из теории, а также основные формулы и уравнения, необходимые при решении контрольного задания. Здесь также решены несколько задач-примеров с подробными теоретическими и соответствующими методическими указаниями. В работе предлагается оригинальный способ получения своего варианта каждым студентом из приведённой здесь таблицы, используя шифр из трёх букв, указанный преподавателем. В качестве шифра можно указать комбинации из начальных букв фамилии имени и отчества студентов (т.е. Ф.И.О.). Например, шифр КАН означает, что конструкцию для расчета студент должен взять на пересечении строки таблицы, помеченной буквой „К” и столбца, где указаны схемы конструкций; величины сил и моментов, действующих на конструкцию, берутся на пересечение строки „А” и столбца, где указаны эти величины, а размеры и углы конструкции следует взять на пересечении строки „И” и последнего столбца таблицы. Если в группе окажется несколько студентов с одинаковыми ФИО, то в таблицы есть два резервных варианта на этот случай (или преподаватель может задать студенту произвольный шифр из трёх букв, не совпадающих с его Ф.И.О.). Выполнив контрольную работу, студенту надо «защитить» её, то есть ответить преподавателю на вопросы, возникающие при проверке работы, указать формулы, методы решения, применяемые при расчетах и т.п. Следует помнить, что к зачёту (экзамену) по теоретической механике допускается только студенты, успешно сдавшие все контрольные работы данного семестра. 4 Равновесие системы сочлененных тел. В статике часто приходится решать задачи, в которых рассматривается равновесие систем, состоящих из нескольких твёрдых тел, соединённых между собой разного вида связями (шарнирами, нитями, стержнями и т.п.), хотя тела системы могут свободно опираться друг на друга. Для краткости такие системы твёрдых тел будем называть конструкциями. В этом случае связи, соединяющие тела конструкции между собой, называют внутренними, а связи, соединяющие тела конструкции с телами, не входящими в её состав, называют внешними. В соответствии с этим силы, действующие на конструкцию тоже, делят на две группы: внешние силы и внутренние силы. Внешними называют те силы, с которыми тела, не входящие в состав конструкции, действуют на тела конструкции. Внутренними называют те силы, с которыми взаимодействуют друг с другом тела данной конструкции. При этом важно помнить, что внутренние силы всегда попарно равны по модулю и направлены по одной прямой в противоположные стороны; при этом они приложены к двум разным взаимодействующим телам системы. В качестве примера рассмотрим конструкцию, изображенную на рис.1. Конец А балки АВ жестко заделан в стену, другим концом она соединена со второй балкой ВD цилиндрическим ⃗ В А D шарниром В. 2a а а Рис.1 В точке D балка ВD опирается на шарнирно-подвижную опору. В этом примере конструкция состоит из двух тел (балки АВ и ВD). Шарнир В является внутренней связью, а силы взаимодействия между балками в этом шарнире будут внутренними силами для этой конструкции. Реакции стенки и опоры D являются для конструкции внешними силами, так как стена и опора D не принадлежат этой конструкции, состоящей только из указанных балок АВ и ВD. 5 Краткие сведения из теории. В этом разделе будут даны некоторые теоретические сведения из математики и теоретической механики, необходимые для понимания поставленной задачи и правильного выполнения расчёта равновесия заданной конструкции. Упор сделан на те положения теории, которые, как показывает опыт, студенты младших курсов или уже забыли, или не умеют правильно их использовать. 1. Тригонометрические функции в прямоугольном треугольнике, рис.2. с=ВС –гипотенуза, а=АВ, в=АС –катеты, с а в –теорема Пифагора а в а с с в в с В а с в а β Из этих равенств следует: а с в с в а а с а 2.Формула приведения: а) Если угол исходной функции α отсчитывается от горизонтального А С в диаметра (т.е. аргумент функции Рис. 2 имеет вид ( )), то название функции сохраняется; если же отсчитывается от вертикального диаметра (т.е. аргумент функции имеет вид ( ) или ( )), то название исходной функции заменяют на сходное, т.е. синус заменяют на косинус, тангенс на котангенс и т.п. б) Перед получаемой функцией ставим тот знак, который имеет исходная функция в предположении, что угол -острый ( ⁄ ), какой бы он ни был на самом деле. Примеры. ( ( ) ) ( ) 3. Разложение вектора силы на составляющие. Задача о разложении силы на две составляющие есть обратная задача по отношению к определению равнодействующей двух сил, приложенных в одной точке. 6 Пусть дана сила ⃗ , приложенная в точке А, и два направления АВ и АС, по которым надо разложить вектор ⃗ , рис.3. Для этого из конца вектора ⃗ проводим две прямые, параллельные заданным направлениям, до их пересечения в точках В и С с лучами АВ В и АС. Получим параллелограмм АВ С , ⃗⃗⃗⃗⃗⃗⃗⃗ и АС ⃗⃗⃗⃗⃗⃗⃗⃗ есть в котором векторы АВ А ⃗⃗⃗⃗⃗⃗⃗⃗ искомые составляющие. Положив ⃗⃗⃗⃗=АВ ⃗⃗⃗⃗⃗⃗⃗⃗ , ⃗⃗⃗⃗⃗=АС D имеем, очевидно, ⃗ =⃗⃗⃗⃗ ⃗⃗⃗⃗⃗. 4.При решении задач статики приходится много раз вычислять C проекции заданных сил на выбранные оси Рис. 3 координат. При осуществлении этой достаточно простой операции часто делают ошибки, из-за которых получают неверные уравнения равновесия тела и, как следствие, неправильное решение задачи. Проекцию данной силы на ось определяем как взятое со знаком (+) или (-) произведение модуля силы на косинус острого угла между силой и осью проекций. В этом произведении берут знак (+), если направление силы составляет острый угол с положительным направление оси и знак (-), если направление силы составляет острый угол с отрицательным направлением выбранной оси, рис.4. ⃗⃗ ⃗ ⃗⃗⃗⃗⃗⃗ O α α <0) ⃗⃗⃗⃗⃗ х >0) Рис. 4 7 Из определения получаем частные случаи: а) если сила параллельна оси и сонаправлена с осью, то угол между ними считают равным нулю, поэтому проекция силы на ось просто равна модулю силы, б) если сила параллельна оси, но направлена противоположно положительному направлению оси, то угол между ними равен и проекция силы на ось в этом случае будет равна взятому со знаком (-) модулю силы, в) если сила перпендикулярна оси, то её проекция на эту ось равна нулю, рис.5. О x Рис. 5 Согласно сказанному выше, получим, рис.5: , т.к. направление силы совпадает с положительным направлением оси, , т.к. ; сила ⃗⃗ оси О , ; проекция отрицательна, т.к. угол между вектором ⃗ и отрицательным направлением оси О острый, , , т.к. вектор ⃗ составляет острый угол с отрицательным направлением оси О . Замечание. Если вектор силы располагается на рисунке далеко от выбранной оси, то иногда бывает затруднительно сразу определить угол между ними. В таких случаях можно воспользоваться таким искусственным приёмом: провести более удобную вспомогательную ось, параллельную первоначальной оси и помнить, что проекции вектора на параллельные оси совпадают (смотри, например оси y и y’ на рис. 5). Запишем проекции векторов на ось OY (рис. 5): ; . Двойные равенства в этих выражениях получаются, если использовать указанные выше формулы приведения. 5. Вычисление алгебраического момента силы относительно точки 8 Алгебраические моменты сил относительно точки приходятся вычислять, когда решают задачи на равновесие плоской системы сил. Вычисление таких моментов можно производить одним из трех способов: а) используя определение момента силы относительно точки, б) применяя теорему Вариньона, в) используя координаты точки приложения силы и проекции заданной силы на выбранные оси координат. Какой из этих способов проще и быстрее приводит к цели? Выбор способа зависит от опыта и навыков, приобретенных студентом при решении задач по теоретической механике. Суть указанных способов покажем, рассмотрев следующий пример. Пример 1. Прямоугольная плита ABCD крепится к опорам A и D, её размеры AD=a, AB=b. В точке С на плиту действует сила ⃗ , направленная под углом к вертикали. Определить момент силы ⃗ относительно точки A, рис. 6 а). K С В В α α С M α в N А D А α а α D б) а) Рис. 6 Решение. а) По определению алгебраическим моментом силы ⃗ относительно точки А называют взятое со знаком (+) или (-) произведение модуля силы ⃗ на её плечо h=AK относительно этой точки. Знак (+) берется в том случае, когда сила ⃗ стремиться вращать тело вокруг моментной точки против хода часовой стрелки, знак (-) –если по ходу часовой стрелки, рис. 6 б). В этом примере (⃗ , где величину h вычислим, используя рис. 6б). Опустив из точки D перпендикуляр DM на прямую AK, получим, что h=AK=AM+MK. Из находим, что АМ а из ΔCND получаем, что . Здесь CN – перпендикуляр, опущенный из точки С на прямую DM. Из этих равенств следует, что , поэтому (⃗ . б) Применим для определения искомого момента теорему Вариньона, которая гласит (для плоской системы сил): момент равнодействующей плоской системы 9 сил относительно любой точки на плоскости равен алгебраической сумме моментов всех сил системы относительно той же точки. Разложим вектор ⃗ на y горизонтальную С В составляющую⃗⃗⃗⃗ ( α и вертикальную составляющую ⃗ в , рис.7. Поскольку сила ⃗ есть А D равнодействующая сил а x z ⃗⃗⃗⃗ и ⃗ , то по теореме Вариньона находим: ⃗⃗⃗⃗ )+ ⃗ , (⃗ Рис.7 где , (⃗⃗⃗⃗ ) . (⃗ ) После упрощения получим, что (⃗ . в) Проведем оси координат X, Y, Z так, как показано на рис.7. Тогда точка приложения силы С имеет координаты с а , а проекции силы ⃗ на эти оси есть . В теории моментов сил имеется формула: , ( ⃗) ( ⃗) Из которой находим: . ( ⃗) 6. Приведем формулировки некоторых аксиом статики, которые используются при расчетах равновесия конструкций. Аксиома связей. Всякое несвободное твердое тело можно освободить от связей, заменив их действие на тело реакциями этих связей, и рассматривать его как свободные, находящиеся под действием приложенных к нему активных сил и реакций связей. Принцип отвердения (аксиома). Если механическая система и, в частности, деформируемое тело находится в равновесии под действием приложенных к ней сил, то равновесие не нарушится, если мысленно считать, что система ( или тело) затвердеет (т.е. механическая система станет неизменяемой, а деформируемое тело –твердым). Аксиома (закон равенства действия и противодействия). Два тела действуют друг на друга с силами, равными по величине и направленными по одной прямой в противоположные стороны. При использовании этой аксиомы надо понимать, что силы взаимодействия двух тел, о которых говорится в аксиоме, не образуют уравновешенную систему сил, поскольку они приложены не к одному, а к двум разным телам. 10 Основные типы связей и их реакции. Рассмотрим основные виды связей и дадим им краткое описание, рис.8. 1. Гладкая поверхность (гладкие пол, стена, плоскость и т.п.). Гладкой называют такую поверхность, трение на которой рассматриваемого тела настолько мало, что им можно пренебречь. Реакция такой поверхности ⃗⃗ направлена перпендикулярно общей касательной плоскости АВ, проведённой через точку контакта С двух тел и приложена в этой точке. Частный случай. Если при соприкосновении двух тел поверхность одного из них вырождается в точку, то реакция направлена перпендикулярно поверхности другого тела, рис.8, . 2. Нить (гибкая связь). Это обобщающее слово обозначает всякую связь, выполненную в виде гибкой нерастяжимой нити (это трос, цепь, верёвка, канат, шнур и т.п.). Реакция ⃗⃗ натянутой нити всегда направлена по нити в сторону от удерживаемого тела, реакцию нити часто называют «натяжение нити». 3. Шарнирно-подвижная опора. Такая опора устанавливается на цилиндрические катки; она позволяет телу вращаться вокруг шарнира (оси) А, а катки могут перемещаться по некоторой плоскости. Реакция этой опоры направлена перпендикулярно плоскости, по которой могут перемещаться катки, рис.8,(3). 4. Шарнирно-неподвижная опора. Эта опора отличается от предыдущей только тем, что у неё нет катков, т.е. она жёстко крепится к неподвижному основанию. Направление реакции такой опоры заранее неизвестно, поэтому при решении задач её заменяют двумя тоже неизвестными составляющими ⃗⃗⃗⃗⃗ ⃗⃗⃗⃗, направляя их обычно по положительным направлениям осей координат, рис.8, (4). 5. Невесомый твёрдый стержень. Он шарнирно соединяется одним концом с рассматриваемым телом, а другим концом с каким-либо другим неподвижным телом (стеной, полом и т.п.). При этом считается, что вес самого стержня настолько мал, что им можно пренебречь и, кроме того, на стержень не действуют никакие заданные силы. При этих предположениях на стержень действуют только две силы, приложение на его концах, а так как при его равновесии эти силы должны быть направлены по одной прямой, то отсюда следует вывод: реакция ⃗⃗⃗⃗⃗⃗ такого стержня направлена по оси стержня и приложена к данному телу. Очевидно, что стержень при этом может работать как на растяжение, так и на сжатие, рис.8,(5). 6. Жёсткая заделка (или жёстко защемляющая неподвижная опора). Эта связь не позволяет телу совершать ни поступательного, ни вращательного движений. Если привести систему сил-реакций заделки к центру А, то получим одну неизвестную результирующую силу ⃗⃗⃗⃗⃗ и результирующую пару сил с неизвестным моментом ⃗⃗⃗⃗⃗⃗. При решении задач, в которых на твёрдые тела действует плоская система сил, неизвестную реакцию ⃗⃗⃗⃗⃗ изображают её составляющими , а вектор-момент заделки ⃗⃗⃗⃗⃗⃗ заменяют его 11 алгебраической величиной . Следовательно, чтобы найти реакцию заделки, надо найти три неизвестные величины: и , рис.8 (6). 7. Цилиндрический шарнир (или подшипник). В первом приближении этот подшипник можно представить себе как закреплённый полый цилиндр внутри которого проходит ось вращения данного тела. Такой шарнир (подшипник) позволяет телу совершать два движения: вращаться вокруг оси цилиндраподшипника и перемещаться вдоль этой оси. Перемещаться же перпендикулярно указанной оси тело не может, поэтому реакция цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси шарнира. Если обозначить, например, ось шарнира через y, то неизвестная реакция ⃗⃗⃗⃗⃗ его будет иметь составляющую ⃗⃗⃗⃗⃗ (т.к. подшипник не препятствует движению тела вдоль оси вращения y, то нет и реакции, направленной вдоль этой оси); при решении задачи реакцию ⃗⃗⃗⃗⃗ следует разложить только на две составляющие ⃗⃗⃗⃗⃗ и ⃗⃗⃗⃗⃗, рис.8 (7). 8. Подпятник. Эта связь применяется в тех случаях, когда надо ограничить перемещение оси вращения твердого тела по вертикали. Она представляет собой совокупность цилиндрического шарнира и опорной поверхности. Если обозначать через z ось подпятника, то реакция его основания ⃗⃗⃗⃗⃗ направлена вертикально вверх, а направлении реакции его стенок заранее неизвестно, хотя лежит она в плоскости XAY, перпендикулярной оси AZ. При решении задач горизонтальную реакцию раскладывают на составляющие ⃗⃗⃗⃗⃗ и ⃗⃗⃗⃗ вдоль координат осей. Если задача плоская, то, обозначив через Y вертикальную ось вращения тела, неизвестную реакцию подпятника A заменяют её неизвестными составляющими ⃗⃗⃗⃗⃗ и ⃗⃗⃗⃗. 12 13 Распределённая нагрузка. При решении задач статики иногда встречаются задачи, в которых на тела действует так называемая «распределённая нагрузка». Поясним этот термин несколькими примерами. Например, зимой во время ненастной погоды провода линий электропередач обрастают толстой коркой льда настолько, что происходит обрыв проводов из-за большого веса льда. Это пример нагрузки, распределённой по линии (по длине провода). Или зимой во время обильного снегопада, крыши домов, сараев, других строений покрываются толстым слоем снега, под действием веса которого происходит разрушение этих крыш. Это пример нагрузки, распределенной по площади крыши. Любое твердое тело является примером нагрузки, распределённой по объёму тела. Параметр, который числено характеризует распределённую нагрузку, называют интенсивность нагрузки. Интенсивность нагрузки –это величина силы, приходящаяся на единицу длины линии (или на единицу площади, или на единицу объёма тела). При решении задач распределённую нагрузку заменяют одной сосредоточенной силой (т.е. равнодействующей), хотя иногда проще заменить её двумя –тремя сосредоточенными силами,рис.10. Если распределённая нагрузка представляет собой систему параллельных сил, непрерывно распределенных по линии (поверхности или объёму) то, используя свойства определённого интеграла, получаем следующее правило для определения равнодействующей распределенной нагрузки. Рассмотрим подробно это правило в случае нагрузки, распределенной по линии, хотя им можно в q(х) пользоваться и в других случаях. Пусть, например, на а C отрезке АВ оси ОХ действует распределенная нагрузка, перпендикулярная оси с О Х переменной интенсивностью А В q=q(х), рис.9. Рис.9 Заштрихованная фигура, ограниченная снизу отрезком АВ, , сверху графиком интенсивности q=q(х), слева и справа крайними ординатами Аа и Вв называется эпюрой распределенной нагрузки. Равнодействующую распределенной нагрузки находят следующим образом: 1) Численно равна площади эпюры, измеренной в соответствующем масштабе, то есть R=площади АВва, 2) Вектор проходит через центр тяжести С площади эпюры, рис.9. 14 Частные случаи. а в А D В ВD Рис. 10 АВ , r а) Если эпюра имеет вид, изображенный на рис.10, то намного проще заменить действие распределенных сил не одной силой (равнодействующей), а двумя силами: для части эпюры АВва и для части ВDв. При этом численно В q б) Если силы равномерно распределены по дуге окружности радиуса r, рис.11, образуя систему сходящихся сил постоянной интенсивности (q=const), то в силу симметрии нагрузки её равнодействующая будет направлена по оси симметрии OX и численно равна произведению хорды АВ, стягивающей дугу АВ, на интенсивность, т.е. R=АВ*q=q*2r*sin , где половина центрального угла дуги АВ. Метод решения задач на равновесие конструкций. Напомним, что конструкцией мы назвали систему твердых тел, соединенных между собой связями. В частности, некоторые тела конструкции могут просто свободно опираться друг на друга. При решении задач на равновесие конструкций не возникают новые теоретические вопросы, достаточно знать и иметь практические навыки в использовании аксиом и уравнений равновесия cтатики, полученные при изучении равновесия отдельного твердого тела. Иначе говоря, расчет равновесия конструкций опирается на следующие теоретические положения. 1. Если конструкция находится в равновесии под действием активных сил и реакций связей, то её можно рассматривать как одно «отвердевшее» тело, для которого записывают уравнения равновесия (см.принцип отвердевания). 15 Полученных уравнений часто не хватает, чтобы найти все неизвестные величины. 2. Поскольку конструкция находится в равновесии то, очевидно, в равновесии находится и каждое тело конструкции. Если мы мысленно выделим какое-либо одно тело конструкции, то другие её тела, с которыми взаимодействует выделенное тело, будут являться для него связями. По аксиоме связей эти связи можно отбросить, заменив их действие на выделенное тело соответствующими реакциями и выделенное тело при этом останется в покое. Записав уравнения равновесия этого тела, получают дополнительные уравнения, с помощью которых задача решается до конца. В зависимости от сложности конструкции из неё следует выделить не одно тело, а расчленить систему тел на отдельные элементы и рассмотреть равновесие каждого из них отдельно. 3. При решении задач важно помнить (и изображать на расчётных схемах), что силы взаимодействия двух тел всегда равны по величине и направлены по одной прямой в противоположные стороны. При решении задач можно использовать два приема составления уравнений равновесия. В первом случае записывают уравнения равновесия для всей конструкции (как для одного абсолютно твердого тела), затем систему расчленяют на отдельные тела и записывают дополнительно уравнения равновесия одногодвух её тел; затем решают полученные системы уравнений. Второй прием заключается в том, что конструкцию сразу расчленяют на отдельные тела, затем рассматривают равновесие каждого элемента отдельно, составляя уравнение равновесия для них с учётом всех сил (и активных, и реакций связей), приложенных к рассматриваемому телу. Первый прием позволяет иногда решить задачу проще и быстрее, так как в уравнения равновесия конструкции входят только внешние силы, вследствие чего эти уравнения оказываются проще. Этот прием упрощает решение задачи и в том случае, когда не надо находить реакции внутренних связей. Пример 2. Две горизонтальные балки АВ и ВD, соединены цилиндрическим шарниром В. Опора D – шарнирноподвижная, а сечение А балки защемлено в стене, то есть имеет место жёсткая заделка. Посередине балки ВD приложена сосредоточенная сила F, образующая угол с осью балки. Размеры указаны на рис.12. Пренебрегая массой балок, определить реакцию заделки и опоры D, если а=0,8м, F=5кН, =60°. ⃗ В А 2a а D а Рис. 12 16 Решение. 1. Пользуясь аксиомой связей мысленно отбросим стенку, а её действие на балку АВ заменяем горизонтальной составляющей реакции А, вертикально составляющей УА и моментом заделки МА , рис.13. Аналогично, мысленно отбросив опору D, приложим к балке ВD её вертикальную реакцию. 2. Поскольку в этой задаче не требуется находить реакцию внутреннего шарнира В, то применим первый прием составления уравнений равновесия, то есть сначала запишем уравнения равновесия для всей конструкции, считая её одним «отвердевшим» телом, а затем добавим уравнения равновесия только одной из двух балок конструкции. При этом внутренние силы взаимодействия балок АВ и ВD в шарнире В взаимно уравновешиваются (по закону равенства действия и противодействия), поэтому они не войдут в уравнение равновесия «отвердевшей» конструкции. Выбрав оси координат ХАУ (ось Х – по осям балок, ось У – по стене вверх), запишем три уравнения равновесия для полученной плоской системы сил: ∑ ∑ ∑ (⃗⃗⃗⃗⃗) Таким образом мы получим систему из трёх уравнений, содержащих четыре неизвестные , , и Некоторые студенты, плохо разобравшись с теорией, но понимая, что для решения задачи надо добавить четвёртое уравнение равновесия, записывают его в виде ∑ либо в виде (⃗⃗⃗⃗⃗) ∑ а затем удивляются, что задачу им решить всё же не удаётся. (⃗⃗⃗⃗⃗) Дело в том, что для произвольной плоской системы сил есть только три независимых уравнения равновесия, а любое четвертое, пятое и т.д. уравнения, написанные для этой системы, будут только следствиями уравнений (1), (2), (3) и новой информации из них не получить. 3. Чтобы довести решение задачи до конца, расчленим конструкцию на элементы по шарниру В и рассмотрим равновесие только одного из них, например, балки BD, рис.14 На неё действует 17 активная сила , реакция опоры и реакция отброшенной балки АВ, которая действует на балку BD в шарнире В. Поскольку направление этой реакции заранее нам неизвестно, изображаем её на схеме двумя неизвестными составляющими , так что . Замечание 1. Теоретически действия, проведённые в п.3, опираются на аксиому связей. Для балки BD отброшенная балка АВ является связью. На рис.14 мы эту связь отбросили, а её действие на тело BD заменили реакцией отброшенного тела, т.е. . Замечание 2. Поскольку в задаче не ставится вопрос об определении реакции внутреннего шарнира В, то для полного решения задачи не хватает только одного уравнения равновесия. По этой причине нет смысла записывать все три уравнения равновесия тела ВD, а можно использовать только одно из них. В качестве четвертого уравнения равновесия удобно взять ∑ МВ ( ) , так как в этом случае неизвестные реакции В , УВ (которые не требуется определять) не войдут в состав уравнения: ∑ МВ ( ) , *2а-F* sin *а=0 (4) Решив это уравнение, получим или, подставив в уравнение численные значения заданных величин, найдем: ° √ к Используя уравнения (1), (2), (3), найдем остальные реакции: ° или А к А УА МА √ ° а а √ а √ к √ √ к М Замечание 3. Если бы в этой задаче надо было определить ещё и реакцию шарнира В, то следует записать дополнительно неиспользованные два уравнения равновесия балки ВD, рис.14: ∑ , =0 или В * к В Знак «минус» в ответе указывает на то, что сила В имеет направление, противоположное указанному на рисунке. ∑ У , УВ или УВ УА √ к Пример 3. Система состоит из трёх стержней, один из которых жёстко заделан в основание, а два других шарнирно соединены между собой и с неподвижной опорой, рис.15. К стержню АС приложена линейно распределенная нагрузка с максимальной интенсивностью . 18 К середине стержня СD приложена вертикальная сила , на стержень ВD действует пара сил с моментом М. Определить реакцию в шарнире D и момент в заделке, если =50 , Р=200Н, М=400Нм, а=1м. М Решение. 1. Расчленим эту конструкцию на отдельные тела (по внутренним шарнирам) и будем изучать равновесие каждого из них отдельно. Сначала рассмотрим стержень ВD, на который действует пара сил с моментом М и реакции шарниров В и D, которые нам пока неизвестны, поэтому на схеме изображены неизвестные их составляющие , У , В, УВ по осям координат, рис.16. Поскольку реакцию шарнира В по условию задачи находить не надо, исключим её из уравнений равновесия, записав уравнение моментов относительно точки В: М ∑ МВ ( ) , М а н а 2. Рассмотрим равновесие элемента СD, на который действует вертикальная сила , реакция шарнира С, которая нам неизвестна, поэтому на схеме представлена составляющими С , УС и реакция шарнира D. При этом нужно помнить, что в шарнире D два тела действуют друг на друга (см.закон равенства действия и противодействия) с Рис. 17 силами, равными по величине и направленными по одной прямой в противоположные стороны, рис.17. Примечание. На этом рисунке у векторов реакций шарнира D стоят только буквы , У , указывающие модули этих сил, без знака вектора над ними. Это позволяет не вводить новые обозначения (новые неизвестные) в уравнения равновесия тел, сокращая тем самым количество уравнений для их определения. Запишем для стержня СD уравнения равновесия в первой форме: ∑ , С - =0 или С н ∑ У , УС У ∑М ( ) , Р *СD* ° У *СD* ° С °=0 Сократив последнее уравнение на CD, находим У ° ° ° √ н 19 Из второго уравнения системы получаем: У н УС Полная реакция шарнира D равна √ У √ н 3. Рассмотрим теперь равновесие третьего стержня конструкции АС. На него действует в шарнире С реакция стержня С D, то есть С , УС , равнодействующая распределенной нагрузки по формуле Q= *АС* , величину которой определим * 3а*50=75 н, а приложена эта сила в точке К, причем СК= АС = а. В сечении А этого стержня приложена реакция С заделки, имеющая три неизвестные: две составляющие силы А , УА по осям координат и a момент реактивной пары МА , рис.18. Поскольку по условию задачи нужно определить еще только момент заделки МА а реакции А , УА k находить не надо, то уравнение равновесия стержня АС запишем в виде ∑ МА ( ) , МА а а , С откуда МА а а С нм А q 2a α r a Пример 4. Дана конструкция, состоящая из стержня АВ, имеющего жесткую заделку в точке А и круговой арки ВС, соединенной цилиндрическим шарниром В со стержнем. Другим концом арка крепится к основанию вертикальным стержнем СD, имеющим на концах шарниры рис.19. Приложенная нагрузка и размеры конструкции указаны на рис.19, где дуговой стрелкой 20 условно обозначена пара сил с моментом М. Весом тел пренебрегаем. Определить реакцию заделки в точке А и реакции шарниров В и С, если н , н, М = 20нм, °, °, а=0,8м, r = 2а, q=16 н/м Решение. 1. Для определения реакций расчленим систему и сначала рассмотрим равновесие арки ВС. Выбираем оси координат ОХУ и изобразим все силы, действующие на арку: реакцию шарнира С, направленную вертикально вверх (по оси стержня СD), равнодействующую распределенной нагрузки, численно равную. ° = 16*2*2*0,8* = 25,6н Q=q*2r* и составляющие В , УВ реакции шарнира В. Запишем три уравнения равновесия для полученной плоской системы сил: ∑ , В °+Q ° = 0, Откуда √ В √ н Знак минус у силы указывает на то, что она направлена противоположно направлению, показанному на рисунке. ∑ , ° ° УВ (а) ∑ МО ( ) , В , или н В Из уравнения (а) находим: УВ + √ н 2. Теперь рассмотрим равновесие второго элемента конструкции, то есть стержня АВ. На него действуют: реакция в шарнире В, численно равная УВ , но направленная В, Рис. 21 21 противоположно векторам В , УВ , показанным на рис.20 (по закону равенства действия и противодействия), пара сил с моментом М, реакция жесткой заделки, состоящая из неизвестной по направлению силы, которую изобразим составляющими А , УА и пары сил с реактивным моментом МА , а также сила , рис.21. На этом рисунке у векторов реакций шарнира В стоят только буквы В и УВ без знака вектора над ними, (то есть без черточки); эти буквы указывают только величины этих реакций. Составим три уравнения равновесия для этого тела: ∑ , ° + А = 0, (а) В ∑ , У ∑ МА ( ) УВ ° , УВ а УА = 0, М ° а (б) МА = 0, Подставим в эти уравнения известные величины систему: 27,2+12* + А =0, откуда А =-33,2н 5,74+12* √ + УА =0, УА √ или МА Ответ: н МА В н, УВ н, УА и решим полученную н -5,74*3*0,8+20-12 *0,8+МА А (в) н, нм нм н Замечание. Чтобы проверить правильность проведенных расчетов, можно составить одно из уравнений равновесия для всей конструкции (как для одного твердого тела), учитывая при этом, что реакции внутренних связей взаимно уравновешиваются и в уравнение равновесия конструкции не войдут. Составим, например, уравнение равновесия конструкции в таком виде: ∑М ( ) , ° ° ° А и подставим в него заданные величины и все найденные выше неизвестные. Если расчет сделан верно, то в идеале должны получить тождество 0=0 (небольшие отклонения от тождества допускаются, так как происходят они чаще всего из-за грубых округлениях чисел при вычислениях). В нашем случае получаем √ или те Вывод: расчёт реакций сделан верно. В данной контрольной работе надо рассмотреть равновесие конструкции (системы двух тел), определить реакции её опор и внутреннего шарнира, соединяющего тела конструкции между собой. Схемы конструкций, размеры и 22 нагрузки даны в приведённой таблице, в которой силы и даны в кН, размеры a, b, c –в м, угол α –в град, момент пары сил М –в кН*м, интенсивность распределённой нагрузки q –в к ⁄м 23 Варианты заданий Эл-т Комб. Расчетная схема M;q;P1;P2 a; b; c; α А 4;2;5;8 1,2;2;2 30 Б 6;4;4;6 1,5;2;1,6 60 В 10;2;10;15 1,4;2;1,6 45 Г 12;8;8;10 1,6;1;1,2 30 Д 20;8;10;4 2,1;1,4;2 60 Е 12;8;10;18 2;2,4;1 30 24 Ж 22;10;15;20 1,2;2;1,2 30 З 30;4;8;12 1,8;1,4;2 45 И 20;6;20;10 2,4;1,5;1,2 30 К 15;4;25;30 1,2;1,2;1,5 60 Л 25;6;12;18 1,8;2;1,4 45 М 32;10;10;22 1,5;1,2;1 30 25 Н 40;10;50;30 1,2;2;1,5 60 О 32;12;20;8 1,6;1,2;2 40 П 28;12;36;16 2;1,6;2,4 30 Р 40;10;20;15 0,8;2,1;1 60 С 35;6;25;16 1;1,2;2,1 30 Т 36;12;20;12 1,4;1,8;1,2 45 26 У 38;14;22;10 1,6;2;1,4 30 Ф 40;16;24;12 1,8;2,2;1,6 60 Х 12;4;18;20 2;2,4;1,8 30 Ц 14;6;20;22 2,1;2,5;2 60 Ч 16;4;24;26 2,2;2,6;2 45 Ш 18;6;26;28 2,4;2,8;1,2 30 27 Щ 20;8;28;30 2,5;1,8;1,6 60 Э 15;6;16;20 1,2;1,5;1 30 Ю 16;8;18;22 1,4;1,6;1,2 45 Я 18;10;20;24 1,5;1,8;0;8 60 1 20;12;18;20 1,6;2;1 45 2 22;6;20;25 1,8;1,5;0,9 30 28 Библиографический список. 1. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. «Курс теоретической механики» Т.1 М., Наука. 1985г. 2. Яблонский А.А., Никифорова В.Н. «Курс теоретической механики» ч.1. М., Высшая школа, 1984г. 3. Никитин Н.Н. «Курс теоретической механики» М., Высшая школа, 1990г. 4. Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. «Теоретическая механика в примерах и задачах» Т.1, Москва «Наука», 1990г. Оглавление Предисловие……………………………………………………………………….…4 Равновесие системы сочленённых тел……………………………………………..5 Краткие сведения из теории………………………………………………………...6 Пример 1……………………………………………………………………………...9 Основные типы связей и их реакции……………………………………………...11 Распределенная нагрузка…………………………………………………………..14 Метод решения задач на равновесие конструкций………………………………15 Пример 2…………………………………………………………………………….16 Пример 3…………………………………………………………………………….18 Пример 4…………………………………………………………………………….20 Варианты заданий…………………………………………………………………..24 Библиографический список………………………………………………………..29 29