ИЗМЕРЕНИЯ В СИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ
реклама

Федеральное агентство по образованию
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
В. Е. Унучков
ИЗМЕРЕНИЯ В СИСТЕМАХ
ПЕРЕДАЧИ ИНФОРМАЦИИ
Учебное пособие
ИРКУТСК
2006
УДК 621.396.1
ББК 32.842
У 61
Рецензенты:
Н. Н. Климов, зав. кафедрой телекоммуникационных систем
ИрГУПС, проф., д-р физ.-мат. наук,
В. Л. Паперный, зав. кафедрой общей и космической физики
ИГУ, проф., д-р физ.-мат. наук
Унучков В. Е.
Измерения в системах передачи информации :
У 61
учеб. пособие / В. Е. Унучков. – Иркутск : Иркут.
ун-т, 2006. – 94 с.
В учебном пособии описываются методы и устройства, используемые для проведения измерений в системах передачи информации.
Рассматриваются физические основы работы аналоговых и цифровых
приборов, их достоинства и недостатки, варианты технической реализации, способы уменьшения погрешностей в различных условиях эксплуатации, а также области применения.
Учебное пособие предназначено для магистров и студентов старших курсов, обучающихся по специальности «Радиофизика и электроника» при изучении дисциплин «Радиоизмерения», «Каналы телекоммуникационных сетей», «Методы аналого-цифровых и цифро-аналоговых
преобразований» и может быть полезно при выполнении курсовых, дипломных работ и магистерских диссертаций.
Библиогр. 17 назв. Ил. 56. Табл. 2.
УДК 621.396.1
Б Б К 32.842
© Унучков В. Е., 2006
© Иркутский государственный
университет , 2006
2
Оглавление
Введение
7
Глава 1. ОБЩИЕ ВОПРОСЫ ИЗМЕРЕНИЙ
1.1. Модель объекта измерений
1.2. Классификация измерительных средств и методов измерений
1.3. Особенности радиоизмерений
1.4. Аналоговые и цифровые методы измерений
1.5. Основы метрологической службы
1.6. Классификация радиоизмерительных приборов
Задания и вопросы для самоконтроля
8
8
9
11
12
14
16
18
Глава 2. МЕТОДЫ ИЗМЕРЕНИЯ СОСРЕДОТОЧЕННЫХ ПОСТОЯННЫХ
2.1. Метод амперметра – вольтметра
19
2.2. Электронный омметр
22
2.3. Мостовой метод
24
28
2.4. Резонансный метод
Задания и вопросы для самоконтроля
33
Глава 3. ОСЦИЛЛОГРАФИЧЕСКИЕ МЕТОДЫ ИЗМЕРЕНИЙ
3.1. Электронный осциллограф
3.1.1. Устройство и параметры электронно-лучевой
трубки
3.1.2. Принцип построения изображения
3.1.3. Структурная схема типового осциллографа
3.1.4. Генераторы развёрток
3.2. Специальные виды осциллографических измерений
3.2.1. Круговая и спиральная развертки
3.2.2. Запоминающий осциллограф
3.2.3. Одновременное наблюдение нескольких процессов
3.2.4. Стробоскопический осциллограф
3.3. Панорамные измерения
3.3.1. Измерения частотных характеристик
3.3.2. Измерения передаточных характеристик
3.4. Измерения спектров
3.4.1. Параллельный анализатор спектра
3.4.2. Последовательный анализатор спектра
3.4.3. Трансформация спектра
Задания и вопросы для самоконтроля
34
34
36
39
41
44
44
45
46
48
50
50
52
53
54
55
57
58
Глава 4. ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ И МЕТОДЫ ИЗМЕРЕНИЙ
4.1. Цифро-аналоговые преобразователи
60
4.1.1. ЦАП с матрицей весовых резисторов
60
4.1.2. ЦАП с матрицей R-2R
62
4.1.3. Основные параметры и применение ЦАП
64
3
4.2. Аналого-цифровые преобразователи
4.2.1. Параллельный АЦП
4.2.2. АЦП поразрядного уравновешивания
4.2.3. АЦП с генератором пилообразного напряжения
4.2.4. АЦП с ЦАП в цепи обратной связи
4.3. Измерения интервалов времени, частоты и фазы
4.3.1. Измерение интервалов времени
4.3.2. Измерение частоты
4.3.3. Измерение низкой частоты
4.3.4. Измерение разности фаз
4.4. Цифровой осциллограф
Задания и вопросы для самоконтроля
67
67
69
71
73
75
75
77
79
82
86
89
Заключение
91
Библиографический список
92
4
Список используемых сокращений
А
АД
АС
АЦП
АЧХ
БУ
В
ВУ
Г
ГПН
ГР
ГС
ГСИ
измерений
ГТИ
ГУН
ЕМР
ЗР
ЗУ
И
ИИС
ИН
ИНТ
ИУ
ИЧХ
ИЭ
К
КА
КД
ЛЗ
МП
ОЗУ
ОУ
П
ПЗУ
ПКН
– прибор для измерения тока
– амплитудный детектор
– анализатор спектра
– аналого-цифровой преобразователь
– амплитудно-частотная характеристика
– буферное устройство
– прибор для измерения напряжения
– входное устройство
– генератор
– генератор пилообразного напряжения
– генератор развертки
– генератор строба
– государственная система обеспечения единства
– генератор тактовых импульсов
– генератор, управляемый напряжением
– единица младшего разряда
– запоминающий регистр
– запоминающее устройство
– индикатор
– информационно-измерительная система
– источник напряжения
– интегратор
– исследуемое устройство
– измеритель частотных характеристик
– исследуемый элемент
– компаратор
– калибратор амплитуды
– калибратор длительности
– линия задержки
– микропроцессор
– оперативное запоминающее устройство
– операционный усилитель
– порт
– постоянное запоминающее устройство
– преобразователь код – напряжение
5
ПНК
ПФ
РУ
СМ
СУ
СТ2
Т
ТГ
T/F
У
УЗ
УС
УЧ
Ф
ФНЧ
ФУ
ФЧХ
ЦАП
ШПУ
ЭЛТ
X, Y, Z
6
– преобразователь напряжение – код
– полосовой фильтр
– регистр управления
– смеситель частоты
– согласующее устройство
– двоичный счетчик
– триггер
– тактовый генератор
– преобразователь кода времени в код частоты
– усилитель
– устройство записи
– устройство синхронизации
– устройство чтения
– фильтр
– фильтр нижних частот
– формирующее устройство
– фазочастотная характеристика
– цифро-аналоговый преобразователь
– широкополосный усилитель
– электронно-лучевая трубка
– каналы электронно-лучевой трубки
Введение
Измерения играют большую роль во всех областях науки и техники. Без измерений невозможны научные исследования, контроль и диагностика современных технических систем. В системах передачи
информации применяют разнообразные технические
средства и методы измерений при контроле состояния
их узлов и элементов. Важную роль измерения играют
для поддержания высоких метрологических характеристик информационных систем – скорости, точности
и надежности работы.
Среди большого разнообразия видов измерений,
используемых в системах передачи информации, особая роль принадлежит радиоизмерениям. Это связано
с тем, что основным способом извлечения и передачи
информации является преобразование информационных сообщений в электрические сигналы, с последующей их обработкой стандартными радиотехническими методами. К таким методам можно отнести
усиление и фильтрацию сигналов, использование различных видов модуляции, применение спектрального
и корреляционного анализа, а также цифровые методы обработки сигналов. С другой стороны, при измерении сложных, быстроизменяющихся процессов часто удобно иметь дело не с мгновенными отсчетами
характеризующих их величин, а с традиционными для
радиотехники понятиями – амплитудой, частотой, фазой, спектральной плотностью и т. д. Именно по этим
причинам радиотехнические измерения и приборы
нашли широкое применение для получения информации об исследуемых объектах при решении различных научных и технических задач, в том числе и в
системах передачи информации.
7
Глава 1
ОБЩИЕ ВОПРОСЫ ИЗМЕРЕНИЙ
Измерения в технических системах, в том числе и
в системах передачи информации, охватывают широкий круг вопросов по разработке методики, поверке
средств измерений, обработке данных и обоснованию
полученных результатов.
Любое измерение – это оценка параметров модели измеряемого объекта с привлечением технических
средств и методик измерений. Даже самые простые
измерения явно или неявно учитывают модель измеряемого объекта. При проведении сложных измерений
роль модели существенно возрастает. Рассмотрим основные представления о модели и ее применение в
измерениях.
1.1. Модель объекта измерений
Моделью объекта измерений называется совокупность
свойств этого объекта и особенностей его воздействия на измерительный прибор, которые известны с высокой степенью достоверности до приведения измерений, т. е. априори.
Любой реальный объект, в том числе и объект измерений,
имеет более высокую сложность по сравнению со сколь угодно
сложной его моделью. Сложность модели характеризуется числом
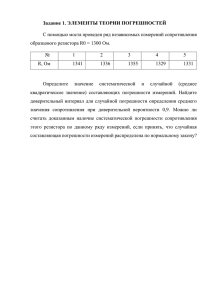
описывающих ее параметров n. Рассмотрим различие (невязку ∆)
между параметрами модели и результатами измерений (рис. 1.1).
Для упрощенной модели объекта с малым числом параметров n
невязка ∆ может значительно превышать погрешность измерений,
задаваемую, например, величиной δ, что означает чрезмерное
упрощение модели по сравнению с точностью этих измерений и
невозможность описания такой моделью реального состояния
объекта. Хотя для модели с бóльшим числом параметров невязка
8
∆ может стать сколь угодно малой, такая переусложненная модель
не в состоянии различить близкие состояния объекта при
существующей погрешности δ.
Из рис. 1.1 видно, что моделью, сопоставимой по точности c
результатами измерений, имеющих погрешность δ, будет модель
такой сложности ni , что ∆(ni) < δ < ∆(ni-1). Тогда при n < ni модели
будут недоусложненными, а при n > ni – переусложненными.
При использова нии более точных измерений, имеющих погрешность γ < δ, появляется возможность перейти к сложным моделям
и описать состояние объекта измерений моделью с большим числом параметров, т. е. с более высокой достоверностью.
∆
δ
γ
ni-2
ni-1
ni
ni+1
n
Рис 1.1. Зависимость невязки модели ∆ от её сложности n
1.2. Классификация измерительных средств
и методов измерений
Различают пять разновидностей средств измерений: мера,
измерительный прибор, измерительный преобразователь, индикатор, информационно-измерительная система.
Мера – обеспечивает поддержание эталона измеряемой величины (магазин сопротивлений, индуктивностей или ёмкостей,
кварцевый генератор, источник образцового напряжения и т. д.).
Измерительный прибор – автономное устройство, позволяет
считывать информацию в удобном для человека виде.
9
Измерительный преобразователь, или датчик – преобразует измеряемую величину в электрический сигнал, на последующих этапах этот сигнал может быть зафиксирован измерительным прибором.
Индикатор – предназначен для грубой оценки измеряемых
параметров, например, электрического напряжения.
Информационно-измерительная система (ИИС) – состоит
из нескольких измерительных приборов, мер, датчиков или преобразователей. Это самое сложное средство измерений, предназначенное для одновременного определения многих параметров.
Может работать в автоматическом режиме по заданной программе. ИИС очень удобна при измерениях, но сложна при разработке
и в обслуживании.
Все измерения делятся на прямые и косвенные.
Прямые измерения следуют непосредственно из опыта, измеряемая величина определяется в ходе эксперимента.
Косвенные измерения строятся по известным зависимостям
между измеряемыми величинами и определяемыми в эксперименте данными. Для выполнения косвенных измерений требуется вычислительное устройство и дополнительное время.
При классификации основных принципов построения измерительных средств выделяют следующие методы измерений:
Метод прямого сравнения – измеряемую величину непосредственно или после преобразования сравнивают с величиной,
воспроизводимой мерой. Чем больше отношение измеряемой и
воспроизводимой величин, тем меньше точность метода.
Дифференциальный метод – измерение разности между измеряемой величиной и величиной, воспроизводимой мерой. Чем
меньше разность, тем больше точность измерения.
Нулевой метод (метод баланса) – результирующий эффект
сравнения доводят до нуля соответствующими изменениями величины, воспроизводимой мерой. Метод имеет очень высокую
точность, определяемую в основном точностью меры.
Метод замещения – последовательно во времени заменяют
измеряемую величину величиной, воспроизводимой мерой. Точность ниже, чем у метода баланса из-за временной нестабильности, как самой меры, так и измеряемой величины.
10
1.3. Особенности радиоизмерений
В измерениях, применяемых при контроле и диагностике
систем передачи информации, большую роль играют радиоизмерения. Радиоизмерениями называются виды измерений, в которых
для обработки информации находят применение радиотехнические методы преобразования сигналов. Радиоизмерения строятся
таким образом, что измеряемые величины на входе измерительного средства преобразуются в радиотехнические параметры – амплитуду, частоту, фазу и т. д. и имеют следующие преимущества
перед другими видами измерений:
1. Унификация измерений – возможность выполнять разнообразные измерения с использованием одних и тех же измерительных приборов по близким методикам измерения.
2. Широкий диапазон измеряемых величин по мощности,
напряжению, току, частоте и т. д. Например, диапазон измеряемых мощностей составляет от долей микроватт до единиц мегаватт, напряжений – от долей микровольт до тысяч вольт, частот –
от долей герц до десятков гигагерц.
3. Высокая точность измерений. Например, частота сигнала
или интервал времени в некоторых условиях легко могут быть
измерены с погрешностью менее 0,0001 %.
4. Удобство обработки, передачи, хранения и выдачи результатов измерений. Каждая измеряемая величина во время измерений преобразуется в электрический сигнал, который легко может
быть обработан, передан на расстояние, сохранён во времени и
выведен на индикатор.
Благодаря этим достоинствам радиоизмерительные приборы
находят широкое применение при проведении измерений в различных областях науки и техники.
В связи с постоянно растущими требованиями к многофункциональности, увеличению точности работы, повышению надежности и улучшению других эксплуатационных качеств современных радиоизмерительных приборов при их разработке широко
применяются микропроцессоры и устройства на их основе. Микропроцессоры в радиоизмерительных приборах решают следующие основные задачи:
1. Тестирование и проверка работоспособности отдельных
элементов и всего измерительного средства.
11
2. Управление работой прибора во время подготовки, проведения измерений и обработки данных.
3. Обработка результатов измерений в реальном масштабе
времени с возможностью изменения алгоритма обработки по условиям измерений.
4. Выдача и хранение результатов измерений, их сравнение с
данными, полученными ранее, или с предельными значениями.
Практически все сложные современные радиоизмерительные
приборы, как правило, имеют микропроцессорное управление.
1.4. Аналоговые и цифровые методы измерений
По способу преобразования измеряемой величины и форме
представления результата все измерения можно разделить на аналоговые и цифровые.
При аналоговых измерениях происходит непрерывное преобразование исходных данных в перемещение указателя (луча по
экрану осциллографа, стрелки по шкале измерительного прибора
и т. д.). Численное значение измеряемой величины определяет
оператор, отмечая положение указателя по шкале или экрану.
Точность измерений при этом ограничивается единицами или десятыми долями процента.
При цифровых измерениях определение измеряемой величины происходит автоматически, путем последовательного или параллельного перебора образцовых значений, даваемых мерой. Результат сравнения формируется в цифровой форме и считывается
оператором, поэтому точность зависит от числа разрядов и может
быть очень высокой. К сожалению, на перебор образцовых значений и другие операции цифровой обработки требуется дополнительное время и, как следствие этого, цифровые методы измерений уступают аналоговым по потенциальной скорости работы.
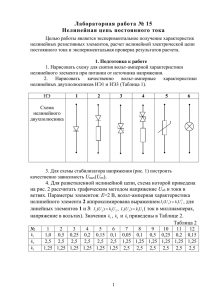
Проведем более детальное сравнение аналоговых и цифровых методов обработки измерительной информации в координатах «Точность – Быстродействие» (см. рис. 1.2). В области сравнительно низкого быстродействия I цифровые методы имеют преимущества перед аналоговыми по точности работы. С увеличением скорости обработки данных это преимущество цифровых методов начинает теряться, поскольку из-за задержек при сравнении
12
с образцовыми значениями приходится уменьшать их число, т. е.
количество разрядов выходного кода. Поэтому в области высокого быстродействия II аналоговые методы превосходят по точности
цифровые. По мере прогресса цифровой техники точка пересечения двух кривых перемещается вправо, и преимущество цифровых приборов над аналоговыми смещается в область более высоких скоростей работы.
Точность
ц
а
I
II
Быстродействие
Рис. 1.2. Сравнение аналоговых и цифровых методов измерений
в координатах «Точность – Быстродействие»
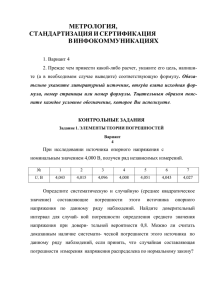
На рис. 1.3 приведено сравнение в координатах «Сложность
– Стоимость». Видно, что при усложнении измерительных
средств (возрастание числа измеряемых параметров, добавление
дополнительных каналов измерений или введение новых этапов
обработки) переход к цифровым методам позволяет уменьшить
Стоимость
ц
а
I
II
Сложность
Рис. 1.3. Сравнение аналоговых и цифровых средств измерений
в координатах «Сложность – Стоимость»
13
стоимость прибора, тогда как для простых измерений стоимость
аналоговых приборов ниже, чем цифровых. По мере развития
технологии производства цифровых элементов и устройств постоянно снижается их стоимость, и точка пересечения кривых на рисунке перемещается влево.
Обычно отмечают следующие преимущества цифровых приборов:
1. Высокая точность.
2. Отсутствие подстройки и регулировки каких-либо элементов во время изготовления и эксплуатации.
3. Возможность смены алгоритма работы путем использования новой программы.
К недостаткам цифровых приборов можно отнести следующее:
1. Более низкое потенциальное быстродействие по сравнению с аналоговыми.
2. Сложность проектирования и ремонта.
3. Высокая стоимость по сравнению с аналоговыми приборами для выполнения простых измерений.
В большинстве случаев применения средств измерений в современных условиях эти недостатки не имеют существенного
значения, поэтому цифровые методы и приборы занимают ведущее место при измерениях в информационных системах. Аналоговые методы применяются в простых средствах измерений, а
также на входе скоростных приборов, предназначенных для контроля и диагностики быстро протекающих процессов и высокочастотных сигналов в информационных системах.
1.5. Основы метрологической службы
Наука об измерениях, методах и средствах обеспечения их
единства, а также способах достижения требуемой точности называется метрологией. В нашей стране метрологии традиционно
уделяется большое внимание – действует комплекс государственных стандартов, объединенных в Государственную систему
обеспечения единства измерений, сокращенно ГСИ. В этот комплекс входят множество стандартов, например, ГОСТ 16263-70
регламентирует терминологию в области измерений, ГОСТ 8.417-81
определяет единицы измеряемых величин, ГОСТ 22261-82 уста14
навливает правила приемки и методы испытаний средств измерений и т. д.
Одним из важных требований при проведении измерений является надёжность средств измерений, т. е. способность выполнять измерения с заданной точностью в течение длительного
времени.
Надёжность характеризуется вероятностью выполнения измерений с погрешностью, не превышающей заданную за определенный интервал времени. С надежностью непосредственно связана интенсивность отказов λ, которая показывает среднее число
отказов в единицу времени.
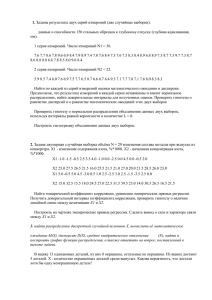
Если проследить, как меняется интенсивность отказов измерительных средств в течение их срока эксплуатации, можно выделить следующие основные этапы (рис. 1.4).
λ
I
II
III
t
Рис 1.4. Зависимость интенсивности отказов λ от времени
эксплуатации средства измерений
На I этапе продолжительностью от нескольких дней до нескольких месяцев из-за скрытых производственных дефектов наблюдается высокая интенсивность отказов. II этап характеризует
нормальный период эксплуатации средства измерений (3–10 лет),
во время которого наблюдается низкая, медленно растущая интенсивность отказов. На III этапе резко возрастает интенсивность
отказов из-за старения элементов и выхода их из строя.
Для обеспечения работоспособного состояния средств измерений в соответствии с требованиями ГСИ в течение всего периода их эксплуатации, создана метрологическая служба, предна15
значенная для контроля метрологических характеристик измерительной техники. Метрологическая служба разделяется на государственную и ведомственную. На крупных предприятиях связи
существует развитая система метрологической службы, состоящая
из отделов, лабораторий и участков по ремонту приборов.
Поддержание средств измерений в работоспособном состоянии осуществляется путём периодических поверок. Поверки проводятся как сравнение результатов измерений с данными образцовых измерительных средств или с помощью специальных эталонных сигналов. Периодичность поверок устанавливается в зависимости от типа и назначения средства измерений и может составлять 0,5; 1; 1,5; 2 или 3 года. В результате поверки на каждое
средство измерений выдается свидетельство установленного образца, которое в обязательном порядке должно включать следующие элементы:
1. Полное наименование, тип и назначение средства измерений.
2. Режимы работы и соответствующие им погрешности измерений.
3. Условия, в которых проводилась поверка данного средства.
4. Дату выдачи свидетельства и срок его действия.
Без данного свидетельства или при окончании срока, на который оно выдано, измерения считаются недействительными, а
лицо, выполняющее такие измерения, в некоторых случаях может
нести административное наказание.
1.6. Классификация радиоизмерительных приборов
Согласно ГОСТу 15094-69 для классификации отечественных радиоизмерительных приборов используется обозначение из
четырех элементов:
1-й элемент – наименование группы (буква русского алфавита).
2-й элемент – номер подгруппы (цифры от 1 до 9).
3-й элемент – номер разработки (цифры от 1 до 100 и выше).
4-й элемент – модификация прибора (буква русского алфавита).
Если модификация только конструктивная, то через дробь
указывается цифра – порядковый номер модификации.
Существуют следующие основные группы измерительных
приборов:
16
А – измерители тока;
Б – источники питания схем измерения и измерительных
приборов;
В – измерители напряжения;
Г – генераторы;
Д – аттенюаторы и приборы для измерения ослабления;
Е – измерители сосредоточенных постоянных (сопротивления, индуктивности, емкости);
И – приборы для импульсных измерений;
К – комбинированные приборы;
Л – приборы для измерения параметров электронных и полупроводниковых приборов;
М – измерители мощности;
П – приборы для измерения напряженности поля и радиопомех;
Р – приборы для измерения параметров элементов и трактов
с распределенными постоянными;
С – приборы для наблюдения и измерения формы сигнала и
спектра;
У – усилители измерительные;
Ф – приборы для измерения разности фаз и группового запаздывания;
Х – приборы для наблюдения и исследования характеристик
радиоустройств;
Ч – приборы для измерения частоты;
Ш – приборы для измерения электрических и магнитных
свойств материалов;
Э – измерители коаксиальных и волноводных трактов;
Я – блоки приборов.
Каждая группа измерительных приборов включает до 9 подгрупп. Их наименование можно найти в справочниках по радиоизмерительным приборам. Для примера приведем названия подгрупп самых распространенных радиоизмерительных приборов,
используемых в системах передачи информации.
В группу генераторов Г входят следующие подгруппы:
Г1 – установки для поверки генераторов;
Г2 – генераторы шума;
Г3 – генераторы низкой частоты;
17
Г4 – генераторы высокой и сверхвысокой частоты;
Г5 – генераторы импульсные;
Г6 – генераторы сигналов специальной формы;
Г8 – генераторы изменяющейся частоты (свип-генераторы).
Группа С (приборы для наблюдения формы сигналов и измерения их параметров) включает следующие подгруппы:
С1 – осциллографы универсальные;
С2 – измерители амплитудной модуляции (модулометры);
СЗ – измерители девиации частоты (девиометры);
С4 – анализаторы спектра;
С6 – измерители нелинейных искажений;
С7 – осциллографы скоростные, стробоскопические;
С8 – осциллографы запоминающие;
С9 – осциллографы специальные.
Например, Г5-102/3 – генератор импульсных сигналов, порядковый номер разработки – 102, третьей конструктивной модификации, С1-65А – осциллограф универсальный, 65-й разработки,
первой модификации.
Задания и вопросы для самоконтроля
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
18
Что такое модель объекта измерений?
Чем характеризуется сложность модели?
Как правильно выбрать сложность модели при выполнении
измерений?
Дайте классификацию средств и методов измерений.
В чем заключаются особенности радиоизмерений?
Опишите роль микропроцессоров в современных радиоизмерительных приборах.
Сравните аналоговые и цифровые методы измерений по точности и быстродействию.
Как изменяется стоимость аналоговых и цифровых средств
измерений при увеличении их сложности?
В чем состоят достоинства цифровых приборов?
Что изучает наука метрология?
Как изменяется надежность средств измерений во время их
эксплуатации?
Опишите основные положения метрологической службы.
Укажите основы классификации отечественных радиоизмерительных приборов.
Приведите пример и расшифруйте обозначение какого-либо
радиоизмерительного прибора.
Глава 2
МЕТОДЫ ИЗМЕРЕНИЯ СОСРЕДОТОЧЕННЫХ
ПОСТОЯННЫХ
Все элементы радиотехнических устройств в информационных системах могут быть распределёнными и сосредоточенными. Распределёнными называются элементы с пространственными размерами, равными или превышающими длины волн распространяющихся через них сигналов. Обычно эти размеры
больше нескольких метров или десятков метров. Сосредоточенными называются элементы с размерами,
малыми по сравнению с длинами волн проходящих
через них сигналов. Сосредоточенными обычно являются типовые элементы и детали электрических и электронных устройств: полупроводниковые приборы, резисторы R, конденсаторы C, катушки индуктивности L
различных типов и т. д.
Рассмотрим основные методы измерения сосредоточенных
постоянных – R, L и C, между токами и напряжениями в которых
существуют известные соотношения:
для R :
для C :
для L :
U
,
R
1
dU
I=
C или U = ∫ Idt ,
dt
C
dU
1
I = ∫ Udt или U = L
.
dt
L
I=
(2.1)
(2.2)
(2.3)
2.1. Метод амперметра – вольтметра
Это наиболее простой метод измерения сосредоточенных постоянных. Сначала рассмотрим его работу на примере измерения
активного сопротивления RX. Два варианта построения измерительных схем показаны на рис. 2.1.
19
а
IA
А
А
U0
б
IA
IВ
В
IR
RX
U0
В
IВ
IR
RX
Рис. 2.1. Два варианта реализации метода амперметра –
вольтметра
В схеме на рис. 2.1а амперметр показывает сумму токов
IА = IВ + IR , а вольтметр измеряет напряжение UR = IR RX . Если
теперь из формулы (2.1) найти неизвестное сопротивление, то
окажется, что результат будет отличаться от точного значения RX :
R Xа =
UR
RX
=
= R X − ∆R .
IU
I R + IU
1+
IR
(2.4)
Здесь индекс а указывает на вариант схемы, а ∆R – ошибка
измерений. Из формулы (2.4) видно, что данный вариант реализации метода амперметра-вольтметра приводит к занижению результатов измерений на величину ошибки ∆R, и эта ошибка тем
меньше, чем сильнее неравенство IВ<IR .
В другом варианте метода амперметра – вольтметра (рис.
2.1б) вольтметр показывает напряжение UВ = UA + UR , где UA –
падение напряжения на амперметре, а амперметр – ток через измеряемый резистор: IA = IR . При расчете величины резистора видно, что результат будет превышать истинное значение на величину ошибки ∆R :
U R +U A
(2.5)
= R X + ∆R .
IR
В этом случае ошибка ∆R уменьшается при усилении нераR Xб =
венства UA<UR .
Можно упростить метод измерений, исключив из схемы
рис. 2.1б вольтметр. Для этого необходимо стабилизировать питающее напряжение U0, т. е. добиться его постоянства независимо
20
от влияния нагрузки, изменения внешних условий и действия других дестабилизирующих факторов.
Сравнивая два варианта реализации метода амперметра –
вольтметра и соответствующие им формулы для расчета измеряемого сопротивления, можно сделать вывод, что вариант а следует
применять для определения сравнительно низкоомных сопротивлений, для которых выполняется соотношение
RX << RB ,
(2.6)
а вариант б, наоборот, для измерения сравнительно высокоомных
сопротивлений, т. е.
RX >> RA .
(2.7)
Здесь RA и RB внутренние сопротивления амперметра и
вольтметра соответственно.
Метод амперметра-вольтметра используется и для измерения
емкости C и индуктивности L. Для этого измерения проводят на
переменном токе, задавая U0 = UM sin(ω t) и определяют реактивные сопротивления XC или XL , затем по формулам рассчитывают
измеряемые величины:
C = ω X C = 2π f X C ,
X
X
L= L = L .
ω 2π f
(2.8)
(2.9)
Частота питающего напряжения f выбирается, исходя из диапазона измеряемых значений C и L таким образом, чтобы их реактивные сопротивления XC и XL удовлетворяли неравенствам (2.6)
или (2.7).
Метод амперметра – вольтметра применяется для построения
простейших измерительных приборов – тестеров, пробников,
авометров – как аналогового, так и цифрового типов. В цифровых
приборах происходит преобразование тока и напряжения в цифровой код, и вычислительное устройство определяет величину
измеряемого элемента путем расчета по формулам (2.4) – (2.9). В
аналоговых средствах измерений используются специально проградуированные шкалы для отсчета величин R , C или L , а сами
измерения выполняют после калибровки прибора, путем установки стрелки указателя на нулевое деление шкалы при замкнутых
21
накоротко измерительных щупах. Калибровка прибора позволяет
исключить из схемы вольтметр, и равносильна заданию точного
значения U0 , для которого проградуирована шкала отсчета. Точность метода амперметра – вольтметра обычно составляет 5–10 %.
2.2. Электронный омметр
Если применить усилитель постоянного тока с большим коэффициентом усиления, например, операционный усилитель
(ОУ), то можно создать простой измеритель активных сопротивлений. Схема такого прибора показана на рис. 2.2.
R1
RX
U0
ОУ
UВЫХ
В
Рис. 2.2. Электронный омметр
Его главное достоинство – линейность шкалы для отсчета результатов измерений. ОУ охвачен отрицательной обратной связью через измеряемый резистор RX , питающее стабилизированное напряжение U0 подано на вход усилителя через вспомогательный
резистор R1, а к выходу подключен вольтметр В. При большом
собственном коэффициенте усиления ОУ, низком выходном и высоком входном его сопротивлениях, выходное напряжение определяется простым выражением:
U ВЫХ = −U 0
RX
R1
(2.10)
и для заданных значений U0 и R1, шкалу измерительного прибора
можно проградуировать в единицах измерения сопротивления для
отсчета значения RX , причем она будет линейной в пределах изменения напряжения от 0 до UВЫХ МАХ – максимального напряжения на
выходе ОУ. Подставляя это напряжение в формулу (2.10), можно
22
найти максимальную величину измеряемого сопротивления:
R X МАХ = − R1
U ВЫХ МАХ
U0
.
(2.11)
Для изменения пределов измерений следует переключить
значения резистора R1 или напряжения U0 .
При измерении низкоомных сопротивлений можно в схеме
поменять местами измеряемый и вспомогательный резисторы.
Тогда выходное напряжение будет обратно пропорционально величине RX :
U ВЫХ = −U 0
R1
.
RX
(2.10а)
Следует заметить, что данный способ включения не позволяет измерять сопротивления менее десятков Ом, поскольку внутреннее сопротивление источника опорного напряжения, которое
составляет доли или единицы Ом, оказывается включенным последовательно с измеряемым сопротивлением и вносит существенную погрешность в измерения. Кроме того, в этом случае теряется основное преимущество прибора – линейность отсчета измеряемого сопротивления.
R3
U0
R1
RX
R2
ОУ
UВЫХ
В
Рис. 2.3. Электронный омметр для измерения низкоомных
сопротивлений
Рассмотрим специальную схему для измерения малых сопротивлений, свободную от этих недостатков (рис. 2.3). Измеряемый
резистор RX вместе с резистором R3 образует делитель напряжения
на входе ОУ. Напряжение на выходе схемы в этом случае равно:
23
U ВЫХ = −U 0
R2
RX
.
⋅
R1 R3 + R X
Если выбрать R3 >> RX , то выражение упростится и шкала
прибора будет линейной относительно RX :
U ВЫХ = −U 0
R2 R X
⋅
.
R1 R3
(2.10б)
Электронный омметр не позволяет измерять реактивные сопротивления, т.к. включение измеряемой индуктивности или емкости в схему изменит фазовые соотношения в цепи обратной
связи ОУ и формулы (2.10) – (2.11) станут неверными. Если фаза
изменит значение на 180°, обратная связь станет положительной и
в схеме возникнет генерация.
2.3. Мостовой метод
Для более точных измерений используется мостовой метод.
Схема, иллюстрирующая его работу, показана на рис. 2.4.
d
Z2
Z1
a
b
В/А
Z3
Z4
c
U0
Рис. 2.4. Мостовая измерительная схема
здесь
24
Z1 = R1 + j ⋅ X 1 = Z1 ⋅ e jϕ1 ⎫
⎪
jϕ 2
Z 2 = R2 + j ⋅ X 2 = Z 2 ⋅ e ⎪
плечи моста;
jϕ 3 ⎬
Z 3 = R3 + j ⋅ X 3 = Z 3 ⋅ e ⎪
⎪
Z 4 = R4 + j ⋅ X 4 = Z 4 ⋅ e j ϕ 4 ⎭
R1–R4 – активные сопротивления; Х1–Х4 – реактивности; ⎪Z1⎪–⎪Z4⎪ –
модули, ϕ1–ϕ2 – фазы комплексных сопротивлений; j – комплексная единица; cd – измерительная диагональ; ab – питающая диагональ; В/А – индикатор баланса, чувствительный вольтметр или
амперметр.
Условием баланса является равенство потенциалов точек c и
d , поэтому при балансе падения напряжений на элементах Z1 и Z3
будут одинаковыми:
U0
U0
⋅ Z1 =
⋅ Z 3 , откуда
Z1 + Z 2
Z4 + Z3
Z 1 ( Z 4 + Z 3 ) = Z 3 ( Z 1 + Z 2 ) или
Z 1 ⋅ Z 4 + Z 1 ⋅ Z 3 = Z 3 ⋅ Z 1 + Z 2 ⋅ Z 3 и окончательно имеем условие
баланса
Z1 ⋅ Z 4 = Z 2 ⋅ Z 3 .
(2.12)
Если неизвестный элемент ZX включен в любое плечо, например, первое, то при выполнении условия баланса его легко
найти:
Z X = Z1 =
Z 2 ⋅ Z3
.
Z4
(2.13)
Формула (2.13) называется рабочей формулой моста.
При балансе моста на постоянном токе, когда все плечи являются активными сопротивлениями R1–R4, можно изменять любое из них, кроме измеряемого, добиваясь баланса моста, а затем
по трём известным сопротивлениям определить неизвестное:
R X = R1 =
R2 R3
.
R4
(2.13а)
При исследовании на переменном токе, с помощью моста
можно измерять как активное, так и реактивное сопротивления.
Обычно условие равновесия моста, содержащее комплексные сопротивления Z1 – Z4 , заменяют двумя условиями: для модулей
комплексных сопротивлений (баланс амплитуд):
⎪Z1⎪⋅⎪Z4⎪=⎪Z2⎪⋅⎪Z3⎪
(2.14)
и для их аргументов (баланс фаз):
25
ϕ1 + ϕ4 = ϕ2 + ϕ3 .
(2.15)
Для балансировки моста на переменном токе необходимо
подстраивать как минимум один активный и один реактивный
элементы схемы, добиваясь и баланса фаз, и баланса амплитуд.
Обычно применяют мостовые схемы с двумя комплексными и
двумя активными плечами. При этом возможны два варианта. В
первом Z1 и Z2 – комплексные, а Z3 и Z4 – чисто активные:
Z1 = R1 + i ⋅ X 1
Z 3 = R3
Z 2 = R2 + i ⋅ X 2
Z 4 = R4
и условие баланса фаз (2.15) запишется так:
ϕ1 = ϕ2 .
Во втором Z1 и Z4 – комплексные, а Z2 и Z3 – чисто активные:
Z1 = R1 + i ⋅ X 1
Z 3 = R3
Z 2 = R2
Z 4 = R4 + i ⋅ X 4
и условие баланса фаз запишется по-другому:
ϕ1 = –ϕ4 .
Анализируя оба варианта включения комплексных сопротивлений, можно заключить, что в первом уравновесить мост можно
однородными реактивностями (обе C или обе L), а во втором –
разнородными реактивностями (в одном плече C, а в другом – L).
Эту особенность мостовых приборов необходимо учитывать при
измерении индуктивностей и емкостей, поскольку в качестве набора образцовых реактивностей обычно применяются магазины
конденсаторов. Поэтому при определении емкости, измеряемый
конденсатор CX включают в одно плечо, например, на место Z1, а
образцовый конденсатор C – в соседнее плечо, на место Z2 или Z3
(рис. 2.5а). При определении индуктивности измеряемый элемент
LX включают, например, на место Z1, а образцовый конденсатор C
– в противоположное плечо, на место Z4 (рис. 2.5б).
26
a
б
C
CX
В/А
В/А
R4
R3
R2
LX
C
R3
U0
U0
Рис. 2.5. Схема моста при измерении емкости (а)
и индуктивности (б)
Рассмотрим основные виды погрешностей, которые возникают при мостовых измерениях.
В мостах постоянного тока в местах соединения его различных элементов может возникнуть термо-ЭДС из-за контакта или
спайки разнородных металлов или их сплавов. На каждом таком
контакте величина термо-ЭДС составляет обычно несколько десятых долей милливольта, что при разных температурах контактов
может приводит к нарушению баланса моста, когда, несмотря на
выполнение условия (2.12), потенциалы точек c и d на рис. 2.3
различны и индикатор В/А показывает отличие от нуля. Оценить
величину относительной погрешности моста δ из-за влияния
термо-ЭДС UТЭДС можно по следующей формуле:
δ=
U ТЭДС
U0
.
(2.16)
Например, если суммарная термо-ЭДС в схеме моста составляет 0,1 В, то при U0 = 10 В δ = 0,01, или 1 %. Для уменьшения
этого вида погрешностей необходимо применять повышенное напряжение питания U0.
Существует способ полной компенсации погрешности мостовых измерений из-за влияния термо-ЭДС, не требующий повышенного напряжения питания. Этот способ предусматривает проведение двух измерений. Первое измерение выполняется при одной полярности питающего напряжения U0, а второе – при смене
полярности на противоположную. Для компенсации влияния паразитных термо-ЭДС, значения которых не зависят от полярности
27
подключенного к мосту источника постоянного напряжения, необходимо вычислить среднее арифметическое значение из двух
выполненных изменений. В простых мостовых измерителях этот
метод устранения погрешностей выполняется вручную, а в мостовых приборах с микропроцессорным управлением – автоматически, по специальной программе, предусматривающей компенсацию ошибок измерений из-за термо-ЭДС и влияния нелинейности
сопротивления контактов в схеме моста.
Другой вид погрешностей возникает в мостах переменного
тока из-за влияния паразитных реактивностей – индуктивностей и
взаимных емкостей деталей и проводников. Этот вид погрешности зависит от частоты питающего напряжения и может значительно исказить результаты измерений на частотах выше 1 МГц.
Для увеличения точности измерений мосты, предназначенные для
работы в этом диапазоне, выполняют определенным образом:
элементы схемы соединяются короткими проводниками, применяют симметричный монтаж моста, а также экранировку отдельных деталей и частей прибора. Несмотря на эти меры, погрешность мостовых измерений на высоких частотах увеличивается и
может доходить до нескольких процентов. На низких частотах
или на постоянном токе погрешность значительно ниже и в обычных условиях составляет доли процента. В прецизионных мостовых измерителях точность может достигать нескольких сотых и
даже тысячных долей процента.
2.4. Резонансный метод
Резонансный метод используется на частотах выше 1 МГц,
где балансировка мостовых схем затруднена из-за паразитных L и
C элементов. В основу метода положено измерение резонансной
характеристики колебательного контура, составленного из образцовой индуктивности L и измеряемой емкости C, или наоборот.
Простейший вариант реализации резонансного метода показан на
рис. 2.6а.
28
а
б
A
Г
L
В
C
f0
f
Рис. 2.6. Иллюстрация применения резонансного метода
Во время измерений изменяется частота генератора синусоидальных колебаний Г, а его амплитуда остается постоянной. Генератор связан с параллельным колебательным контуром LC, в котором возникают вынужденные колебания. С приближением частоты к резонансу амплитуда вынужденных колебаний возрастает,
и вольтметр В фиксирует максимальное напряжение на контуре.
Максимум амплитуды A соответствует резонансной частоте f0, которая отсчитывается по шкале генератора (рис. 2.6б). Зная один из
элементов контура и его резонансную частоту, можно определить
второй элемент колебательного контура. Из известной формулы
f0 =
1
2π LC
(2.17)
находим измеряемые величины, индуктивность
L=
1
,
4π 2 f 02 C
(2.18)
C=
1
.
2 2
4π f 0 L
(2.19)
или емкость
Для уменьшения погрешностей измерений необходимо
уменьшить влияние внешних цепей на колебательный контур. Это
обеспечивается слабой связью контура с генератором и вольтметром. При этом достигается точность измерений порядка нескольких процентов.
Построение резонансной характеристики колебательного
контура при ручной перестройке генератора – трудоемкий и длительный процесс. Для автоматизации измерений можно изменить
схему включения контура (см. рис. 2.7).
29
У
L
Ч
C
Рис. 2.7. Автоматизация резонансного метода
В этой схеме колебательный контур включен в цепь положительной обратной связи широкополосного усилителя У, что приводит к возникновению колебаний на резонансной частоте контура. К выходу усилителя подключен частотомер Ч, который и измеряет частоту этих колебаний, т. е. резонансную частоту f0. Таким образом, значительно ускоряется процесс измерений.
Еще одна разновидность резонансного метода реализована в
индикаторе резонанса (рис. 2.8).
A
Г
LСВ
L
C
Рис. 2.8. Индикатор резонанса
Здесь к выходным зажимам генератора Г через чувствительный индикатор тока А подключена катушка связи LСВ, индуктивно
связанная с исследуемым колебательным контуром LC. При резонансе в контуре ток в катушке связи принимает наименьшее значение и по шкале генератора можно определить резонансную частоту f0. Индикатор резонанса может быть выполнен в переносном
виде, тогда его легко поднести к исследуемому колебательному
контуру без отключения последнего от остальной схемы, поэтому
такой прибор очень удобен при пуско-наладочных работах. После
определения резонансной частоты измеряемую реактивность
можно определить по формулам (2.18)–(2.19).
30
В области высоких частот можно повысить точность измерений, используя вспомогательный генератор и смеситель частот
(рис. 2.9).
Г1
СМ
Г
L C
f0
f1
ФНЧ
f∆
Ч
Рис. 2.9. Выделение разностной частоты
Напряжение от вспомогательного высокостабильного генератора Г1 с частотой f1, смешивается в смесителе СМ с сигналом от
генератора Г с частотой f0, определяемой колебательным контуром
LC. Фильтр нижних частот ФНЧ выделяет разностную частоту
f 0 − f1 = f ∆ , которая может быть измерена с высокой точностью
низкочастотным частотомером Ч. По этим измерениям и известной частоте вспомогательного генератора f1 можно легко определить частоту резонанса f0, а по ней неизвестный параметр L или C.
Точность измерения резонансной частоты в этом методе может
быть очень высокой и определяется силой неравенства f∆ < f0.
Действительно, пусть частотомер имеет относительную погрешность измерений δ , которая не зависит от измеряемой частоты. Как правило, такая закономерность выполняется для современных цифровых частотомеров, точность которых при правильном выборе предела измерений ограничена единицей младшего
разряда. Из определения относительной погрешности δ =
∆f
f0
имеем, что при измерении непосредственно на резонансной частоте, без преобразования частоты, абсолютная ошибка ∆f = f 0δ
из-за высокой частоты
f0
может быть большой. При измерении
31
по схеме (рис. 2.9), при отсутствии погрешности частоты f1 вспомогательного генератора, абсолютная погрешность измерения
разностной частоты ∆f ' = f ∆ δ будет во столько раз ниже ∆f , во
сколько раз f ∆ меньше f 0 . Это позволяет с малой абсолютной
погрешностью измерять высокие частоты не только в резонансном методе измерения L и C, но и при определении частоты различных колебаний в каскадах информационных систем.
Рассмотрим повышение точности резонансного метода. Как
известно, на высоких частотах сказывается влияние паразитных
индуктивностей и емкостей элементов схемы. Для колебательного
контура с учетом паразитных элементов LП и CП схема будет выглядеть, как показано на рис. 2.10а, а резонансная частота с учетом паразитных элементов будет равна:
1
f0 =
(2.20)
2π ( L + LП )( C + C П )
Выполним две калибровки измерительной схемы. Первую
проведем, отключив основной конденсатор колебательного контура С (рис. 2.10б).
б
а
LП
L
C
LП
CП
L
в
C
CП
L
LП
CП
C
Рис. 2.10. Калибровка колебательного контура
Тогда резонансная частота будет равна:
f1 =
1
2π ( L + LП )C П
(2.21)
Вторую калибровку выполним, замкнув основную индуктивность колебательного контура L (рис. 2.10в). В этом случае резонансная частота станет равной:
f2 =
32
1
.
2π LП ( C + C П )
(2.22)
Из выражений (2.20) – (2.22) для f 0 , f1 и f 2 можно найти
три неизвестных величины: LП , CП и измеряемую индуктивность
LХ, если известна емкость С; или измеряемую емкость CХ, если
известна индуктивность L. Решение уравнений (2.20) – (2.22) относительно неизвестных LП , CП и L или С во время измерений затруднено, поэтому применяют специальные графики или номограммы. При реализации резонансного метода с использованием
микропроцессорных устройств вся процедура измерений, включая
две калибровки, выполняется автоматически по программе с последующим вычислением результатов путем решения системы
нелинейных уравнений (2.20) – (2.22) и выдачей на индикатор конечного результата измерений.
Задания и вопросы для самоконтроля
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
Дайте определение сосредоточенных и распределенных постоянных радиотехнических устройств.
Опишите применение метода амперметра – вольтметра и
сравните два варианта его реализации.
Как выполнен электронный омметр, в чем его достоинства и
недостатки?
Приведите схему электронного омметра для измерения низкоомных сопротивлений.
Почему электронным омметром нельзя измерять реактивные
элементы?
Опишите сущность мостового метода измерений.
Приведите условия баланса моста при измерениях на постоянном и переменном токе.
Обоснуйте схемы моста для измерения емкости и индуктивности.
Объясните основные причины возникновения ошибок при
мостовых измерениях на постоянном и переменном токе.
Дайте описание принципа резонансного метода измерений.
Как можно автоматизировать применение резонансного метода?
В чем состоит принцип действия и удобство практического
применения индикатора резонанса?
Как увеличить точность определения резонансной частоты
при измерениях на высоких частотах?
Какова последовательность действий для калибровки измерительного колебательного контура?
33
Глава 3
ОСЦИЛЛОГРАФИЧЕСКИЕ МЕТОДЫ
ИЗМЕРЕНИЙ
Осциллографические методы измерений используются для наблюдения формы сигналов, а также для
измерения их параметров и применяются при настройке, контроле и диагностировании систем передачи информации. Широкое распространение осциллографических методов обусловлено их высокой наглядностью и информативностью, способностью в
режиме реального времени контролировать параметры сложных сигналов.
3.1. Электронный осциллограф
3.1.1. Устройство и параметры электронно-лучевой
трубки
Основой электронного осциллографа является электроннолучевая трубка (ЭЛТ), устройство которой показано на рис. 3.1.
ЭЛТ представляет собой стеклянный баллон, из которого откачен воздух. В баллоне находятся: катод К с подогревателем П
для излучения электронов; модулятор М в виде сетки вблизи катода для управления интенсивностью электронного пучка; фокусирующая система Ф для сведения пучка в тонкий луч вблизи
центра трубки; две пары взаимно перпендикулярных отклоняющих пластин X и Y; ускоряющий анод А для разгона электронов
до больших скоростей и увеличения яркости изображения. Торец
колбы с внутренней стороны покрыт специальным веществом –
люминофором, которое светится при облучении электронами. Катод, модулятор и фокусирующая система вместе образуют электронную пушку.
34
электронная
пушка
экран
К
П
Y
М Ф
X
А
Рис. 3.1. Устройство электронно-лучевой трубки
Управление положением светящейся точки на экране и её перемещением происходит под действием отклоняющего напряжения, приложенного к пластинам X и Y.
Основной параметр ЭЛТ – ее чувствительность, которая характеризует величину отклонения луча на экране при изменении
напряжения на отклоняющих пластинах на 1 В. Различают статическую и динамическую чувствительности. Статической чувствительностью ЭЛТ называется отклоняющая способность пластин при постоянном напряжении на них:
l
)
2
,
h0 =
2U A d
l( D −
(3.1)
где l – длина отклоняющих пластин, D – расстояние пластин от
экрана, UA – напряжение на аноде, d – расстояние между пластинами. Как видно из формулы, h0 возрастает при увеличении длины
пластин l и их расстояния от экрана D, а также при уменьшении
напряжения на аноде UA и расстояния между пластинами d.
Динамическая чувствительность h зависит от частоты исследуемого сигнала и определяется следующим соотношением:
h = h0
sin(π f τ )
,
π fτ
(3.2)
где τ – время пролёта электронами расстояния D, f – частота сигнала. Динамическая чувствительность всегда меньше статической
и только если fτ стремится к нулю, она приближается к статической.
Другой важный параметр электронно-лучевых трубок – частотный диапазон. У трубок обычного типа частотный диапазон
35
снизу не ограничен и включает постоянное напряжение, т. е. частоту fМИН = 0, а максимальная определяется как частота, для которой динамическая чувствительность уменьшается в 2 раз по
сравнению со статической и находится из условия:
h( f МАХ ) = h0 / 2 . Обычно fМАХ составляет несколько единиц –
сотен мегагерц.
Для правильного изображения формы исследуемого сигнала
на экране ЭЛТ необходимо, чтобы отклонение электронного пучка по направлениям X и Y происходило бы практически одновременно. Это возможно, когда расстояние между пластинами Х, Y
мало, а время пролета этого расстояния много меньше времени
существенного изменения исследуемого сигнала (например, 1/4
части периода гармонического сигнала). Простые расчеты показывают, что для максимально достижимой скорости электронного
пучка ~108 м/с и расстоянии между пластинами Х и Y около 5 см
частота сигнала должна быть много меньше 500 МГц. Если это
условие не выполняется, то возникают фазовые искажения, и вид
сигнала на экране ЭЛТ не соответствует действительности.
Для компенсации фазовых искажений при измерении на высоких частотах можно ввести запаздывание сигнала, подключенного к паре пластин, расположенной дальше от катода, равное
времени пролета электронов от одной до другой пары отклоняющих пластин. Из рис. 3.1 видно, что в данном случае запаздывание
нужно ввести в отклоняющий сигнал по каналу Y.
3.1.2. Принцип построения изображения
Рассмотрим принцип построения изображения на экране ЭЛТ
по упрощенной схеме осциллографа, показанной на рис. 3.2. Генератор развертки ГР обеспечивает пилообразное изменение напряжения (см. рис. 3.3) и во время прямого хода TПР с помощью
пластин X перемещает электронный луч в горизонтальном направлении, что на экране выглядит как движение светящейся точки слева направо. Во время обратного хода TОБР напряжение на
пластинах X уменьшается и электронный луч перемещается в обратном направлении – справа налево.
36
S(t)
Y
UY
UX
ГР
ЭЛТ
Рис. 3.2. Упрощенная схема осциллографа
Как видно из рис. 3.3, период пилообразного напряжения,
т. е. период развертки TР = TОБР + TПР . Если входной сигнал отсутствует, луч на экране осциллографа очерчивает горизонталь ную
линию в середине ЭЛТ. При подаче на вход усилителя канала вертикального отклонения Y исследуемого сигнала S(t), луч одновременно с горизонтальным перемещением будет перемещаться и
по вертикали. Если коэффициент усиления усилителя Y по напряжению равен KY , а чувствительность отклоняющих пластин
канала Y – hY , то отклонение светящейся точки на экране в каждый момент времени будет пропорционально исследуемому сигналу и равно KY hY S(t). Таким образом, на экране ЭЛТ луч во время прямого хода построит график зависимости входного сигнала
от времени, т. е. функцию, пропорциональную S(t).
U
UM
TР
TОБР
TПР
t
Рис. 3.3. Вид пилообразного напряжения
Во время обратного хода происходит возврат луча в начальную точку экрана и изображение, построенное в этот промежуток
времени не соответствует привычному для нас виду (время увеличивается не как обычно слева направо, а в обратном направле37
нии), поэтому подачей запирающего напряжения на модулятор
ЭЛТ, осуществляют гашение обратного хода луча и видимой на
экране остается только часть изображения, соответствующая прямому ходу развертки.
Для наблюдения периодических сигналов необходимо синхронизировать развертку осциллографа с частотой исследуемого
процесса. Синхронизация позволяет совместить на экране отдельные части изображения входного сигнала, каждая из которых получена за один прямой ход развертки. При отсутствии синхронизации части изображения за каждый последующий ход развертки
будут смещаться относительно предыдущих и на экране будет
размазанное изображение. На рис. 3.4а показан экран осциллографа при подаче на вход Y синусоидального сигнала с периодом
TC , для трех периодов развертки осциллографа с TР = 0,9TC и длительностью обратного хода TОБР = 0,1TC . Цифры рядом с кривыми
показывают порядок появления частей сигнала, гашение обратного хода на рисунке отмечено пунктиром. Рядом, на рис. 3.4б, приведен пример синхронизации развертки и исследуемого сигнала.
Здесь TР = 2TC , а TОБР = 0,1TР , стрелками показано движение луча. Как видно из рис. 3.4б, благодаря синхронизации видимое на
экране изображение совпадает с частью исследуемого сигнала.
Рис. 3.4. Построение изображения на экране осциллографа
В общем случае условием синхронизации является соотношение:
TР
=n ,
TC
38
(3.3)
где n – целое число. Часто TОБР << TПР, тогда n указывает число
периодов сигнала, видимых на экране.
Для наблюдения непериодических или однократных сигналов, в отличие от непрерывной развертки, рассмотренной ранее,
используется ждущая развертка. Для запуска такой развертки
применяется кнопка «Пуск» на передней панели осциллографа
или специальная пусковая схема. В автоматическом режиме работы запуск генератора развёртки (начало роста пилообразного напряжения) определяется пусковой схемой и совпадает с моментом
достижения исследуемым входным сигналом определённого порога. В ручном режиме запуск развертки происходит в момент
нажатия кнопки «Пуск». Для ждущей развертки TР > TОБР + TПР ,
т. е. между импульсами пилообразного напряжения могут быть
произвольные временные задержки, поэтому такая развертка может быть использована не только для наблюдения непериодических или однократных сигналов, но и в качестве «электронной
лупы» для растяжения небольших участков периодических сигналов на весь экран.
3.1.3. Структурная схема типового осциллографа
Структурная схема (блок-схема) типового электронного осциллографа показана на рис. 3.5. Он состоит из каналов Y, X, Z,
ЭЛТ, органов управления и вспомогательных блоков.
Канал Y
вх. Y
ВУ
Кл1
ШПУ
Кл2
1 - внутр. синхр.
У Y
Кл3
КД
КА
2 - сеть 50 Гц
ЛЗ
1
2
3 - внеш. синхр. 3
или вх. Х
П1
Канал Z
У Z
ЭЛТ
П2
УС
ГР
У X
Канал X
Рис. 3.5. Структурная схема электронного осциллографа
39
В канал Y входят: входное устройство ВУ для согласования
величины исследуемого напряжения с последующими каскадами;
калибратор амплитуды КА, который подключается к ВУ с помощью ключа Кл2; широкополосный усилитель ШПУ для усиления
входных сигналов в широкой полосе частот с минимальными искажениями; линия задержки ЛЗ для введения временной задержки
в исследуемый сигнал с целью наблюдения на экране его переднего фронта; выходной усилитель У Y для управления вертикальным перемещением луча ЭЛТ. На входе канала Y обычно стоит
переключатель, позволяющий выбрать «открытый» или «закрытый» вход осциллографа. Как видно из рис. 3.5, при замкнутом
положении ключа Кл1 на вход попадают как постоянная, так и
переменная составляющие исследуемого напряжения. Это положение Кл1 обозначается « ≅ » и соответствует «открытому» входу. В другом положении, обозначаемом как « ≈ », Кл1 разомкнут,
последовательно с сигналом оказывается включенным конденсатор большой емкости, и вход будет «закрытым» для постоянной составляющей напряжения. Закрытый вход удобен при измерении сигнала, состоящего из большой постоянной и малой переменной составляющих напряжения, например, при исследовании пульсаций на
выходе выпрямителя или импульсного стабилизатора напряжения.
Канал Z состоит из усилителя У Z для управления яркостью
луча при помощи модулятора ЭЛТ, а также калибратора длительности КД, подключаемого к усилителю ключом Кл3.
Канал X включает устройство синхронизации УС для выработки сигнала запуска развертки; генератор развертки ГР с выходным пилообразным напряжением; выходной усилитель У X,
обеспечивающий перемещение луча в горизонтальном направлении. С ГР сигнал поступает не только на выходной усилитель канала X , но и на усилитель канала Z для гашения луча во время
обратного хода. На входе УС стоит переключатель П1, позволяющий выбирать один из трех вариантов синхронизации. В первом положении на вход УС подается сигнал с выхода ШПУ канала Y и происходит внутренняя синхронизация осциллографа по
самому исследуемому сигналу. Во втором положении вход УС
подключается к сети переменного тока, от которой питается осциллограф и осуществляется синхронизация развертки частотой
50 Гц – от сети. В третьем положении на вход УС подается сигнал
40
внешнего запуска от исследуемой схемы или от специального генератора, и развертка осциллографа синхронизируется внешними
импульсами. С помощью переключателя П2 можно исключить из
работы ГР и подать на усилитель канала X непосредственно сигнал
со входа X , совмещенный со входом внешней синхронизации.
Этот режим используется в некоторых специальных измерениях,
например, при получении фигур Лиссажу на экране осциллографа.
3.1.4. Генераторы развёрток
Генератор развёртки необходим для получения периодического линейно-изменяющегося напряжения, синхронизированного
с исследуемым сигналом. Его основные параметры: период развертки – ТР, длительности прямого – ТПР и обратного – ТОБР хода,
амплитуда выходного импульса – UМ (рис. 3.3). Кроме этих параметров большое значение имеет коэффициент нелинейности γ ,
который характеризует отклонение выходного напряжения от линейного закона во время прямого хода:
⎛ dU ⎞
⎛ dU ⎞
−⎜
⎟
⎜
⎟
dt
dt
⎝
⎠ MAX ⎝
⎠ MIN ,
(3.4)
γ =
⎛ dU ⎞
⎜
⎟
⎝ dt ⎠ MAX
⎛ dU ⎞
– максимальная и минимальная скорости изме⎟
⎝ dt ⎠ MAX ,MIN
где ⎜
нения напряжения развертки при построения изображения на экране осциллографа (рис. 3.6).
U
du
MIN
dt
dt
U0
UM
du
MAX
TПР
TОБР
t
Рис. 3.6. Нелинейность пилообразной развертки осциллографа
41
Рассмотрим самый простой принцип построения генератора
развертки с использованием RC цепочки (см. рис. 3.7а). После
размыкания ключа Кл начинается рабочий ход и конденсатор С
через резистор R заряжается по экспоненциальному закону от источника постоянного напряжения U0:
⎛
⎛ − t ⎞⎞
U ВЫХ = U 0 ⎜⎜1 − exp⎜ ⎟ ⎟⎟ ,
⎝ τ ⎠⎠
⎝
(3.5)
где τ = RC – постоянная времени цепи заряда конденсатора.
а
R
U0
б
Кл
C
Кл
UВЫХ
U0
C
R
ОУ
UВЫХ
Рис. 3.7. Два принципа получения пилообразного напряжения
Продифференцируем выражение (3.5) по t и найдем максимальное и минимальное значения производных, подставив вместо
t момент начала (t = 0) и момент окончания (t = TПР) импульса
развертки:
U
⎛−T ⎞
⎛ dU ⎞
= 0 exp⎜ ПР ⎟ .
⎜
⎟
RC
⎝ dt ⎠ MIN
⎝ τ ⎠
U
⎛ dU ⎞
= 0 ,
⎜
⎟
RC
⎝ dt ⎠ MAX
(3.6)
Ограничимся начальным участком экспоненциальной зависимости, где отклонение от линейной функции не очень велико, и
выберем TПР << τ . Тогда экспоненту можно разложить в ряд и
ограничиться первым членом разложения:
T
⎛ −T ⎞
exp⎜ ПР ⎟ ≈ 1 − ПР .
τ
⎝ τ ⎠
(3.7)
Подставив (3.6), (3.7) в (3.5) получим
γ≈
42
TПР
τ
.
(3.8)
Определим, какую часть от U0 составляет амплитуда импульса UM , и вычислим коэффициент использования питающего
напряжения:
ξ=
UM
⎛−T
= 1 − exp⎜ ПР
U0
⎝ τ
⎞ TПР
=γ .
⎟≈
⎠ τ
(3.9)
Здесь учтено, что в выражении (3.5) напряжение достигает
максимума UM при t = TПР и экспонента заменена разложением
(3.7).
Как видно из формулы (3.9), у простейшего генератора на RC
интегрирующей цепочке коэффициент нелинейности γ равен коэффициенту использования питающего напряжения ξ. По этой
причине невозможно одновременно получить хорошую линейность и большую амплитуду пилообразного импульса. Если принять допустимым γ = 5 %, то амплитуда выходного импульса будет составлять только 1/20 часть питающего напряжения. По этой
причине схема (рис. 3.7а) не используется на практике.
Рассмотрим схему генератора на основе операционного усилителя ОУ, в цепь отрицательной обратной связи которого включен накопительный конденсатор (рис. 3.7б). В этой схеме ток заряда конденсатора за все время нарастания выходного импульса
остается постоянным, поэтому напряжение на нем в силу выражения (2.2), а, следовательно, и на выходе ОУ увеличивается по линейному закону. Скорость нарастания напряжения практически
постоянна и равна U0/RC. В момент окончания прямого хода пилообразного напряжения замыкается ключ Кл, конденсатор С разряжается, формируется обратный ход, затем рабочий цикл повторяется. Максимальное напряжение на выходе ограничено только
напряжением питания ОУ и может составлять 5–12 В.
Этот принцип получения пилообразного напряжения на ОУ
позволяет добиться коэффициента нелинейности менее 0,1 %, коэффициента использования питающего напряжения ~1 и широко
применяется при построении генераторов горизонтальной развертки осциллографов.
43
3.2. Специальные виды осциллографических
измерений
3.2.1. Круговая и спиральная развертки
При малых размерах экрана ЭЛТ можно увеличить длину
развертки, заменив линейное перемещение луча в центре экрана
его круговым движением с радиусом, близким к максимальному.
Кроме увеличения примерно в π раз длины развертки, при этом
отпадает необходимость гашения луча во время обратного хода,
как в случае линейной развертки.
Рассмотрим принцип получения круговой развертки
(рис. 3.8).
UP
+
π
−
UC
2
π
Y
ЭЛТ
X
2
Z
Рис. 3.8. Принцип получения круговой развертки
Синусоидальное напряжение развертки U P = A sin( ω t + ϕ )
через фазовращатель, сдвигающий фазу сигнала на +π/2, поступает на канал вертикального отклонения Y. Этот же сигнал через
другой фазовращатель, сдвигающий фазу сигнала на – π/2, подается на канал горизонтального отклонения X. Для простоты будем
считать, что чувствительность отклоняющих пластин осциллографа в каналах Y и X одинакова и равна h, а фазовращатели
имеют коэффициенты передачи амплитуды, равные 1. Тогда отклонения луча на экране ЭЛТ будут иметь следующие проекции:
y = h A sin( ω t + ψ ) ,
Здесь ψ = π
2
x = h A cos( ω t + ψ ) .
(3.10)
+ϕ .
Уравнения (3.10) являются параметрическими уравнениями
окружности в координатах X, Y. Действительно, вычислив сумму
44
квадратов выражений (3.10), будем иметь x 2 + y 2 = h 2 A 2 = const .
Таким образом, луч на экране осциллографа будет двигаться по
кругу с радиусом, зависящим от амплитуды сигнала развертки.
Для создания спиральной развёртки используем ту же схему
(рис. 3.10), но на ее вход подадим синусоидальное напряжение,
амплитуда которого на определенном интервале возрастает по
линейному закону:
U P = V0 t sin( ω t + ϕ ) ,
(3.11)
где V0 – постоянная скорость нарастания напряжения. В этом случае луч на экране будет двигаться по разворачивающейся спирали
и общая длина развертки примерно равна π rMAX N , где rMAX – максимальный радиус спирали.
При использовании спиральной или круговой разверток исследуемый сигнал подается на канал Z и изменяет яркость луча.
Тогда по числу n светящихся меток (рис. 3.8), зная период развертки TP, можно определить период TC или частоту fC сигнала:
TP
T
= n , TC = P ,
TC
n
fC =
n
.
TP
(3.12)
3.2.2. Запоминающий осциллограф
Запоминающие осциллографы используются для наблюдения
формы и измерения параметров однократных или непериодических сигналов. Для таких измерений применяются специальные
ЭЛТ с послесвечением. Длительность послесвечения – важный
параметр ЭЛТ и осциллографа, от него во многом зависит качество получаемого изображения. Для исследования процессов, мало
отличающихся от периодических, это время должно быть небольшим, чтобы изменения изображения на экране успевали бы за
поведением сигнала. При наблюдении однократных или непериодических процессов, длительность послесвечения должна быть,
наоборот, достаточно большой, чтобы изображение некоторое
время после окончания сигнала оставалось на экране и происходило бы «запоминание» сигнала или его части.
Запоминающие ЭЛТ различают по длительности послесвечения:
1. Менее 10-5 с – очень короткое
45
2. 10-5 – 10-2 с
– короткое
-2
-1
3. 10 – 10 с
– среднее
4. 0,1 – 16 с
– длительное
5. Более 16 с
– очень длительное
В запоминающих осциллографах применяются ЭЛТ типов
3–5. Для удобства работы, особенно с ЭЛТ 5-го типа, используется электрическое стирание, когда при подаче специального стирающего импульса изображение на экране исчезает и можно запоминать следующий сигнал.
Более удобно выполнять исследования однократных и непериодических сигналов с помощью цифровых осциллографов (см.
раздел 4.4), для которых длительность запоминания практически
не ограничена. Цифровые осциллографы незаменимы для сравнения сигналов, полученных в разное время или в разных условиях.
3.2.3. Одновременное наблюдение нескольких процессов
Для одновременного наблюдения на экране осциллографа
нескольких исследуемых процессов можно использовать многолучевые ЭЛТ. Такие ЭЛТ в одной колбе содержат несколько электронных пушек и пар отклоняющих пластин X и Y. Обычно применяются двухлучевые ЭЛТ и для упрощения их конструкции используют одну пару пластин X, общую для двух лучей. Двухлучевые осциллографы, построенные на таких трубках, имеют один
канал X, общий для двух лучей, и по два канала Y и Z. Они позволяют проводить исследования двух процессов с одинаковым временным разрешением, например, наблюдать выходные сигналы
одновременно со входными, анализировать работу разнообразных
преобразователей, выполнять измерения задержек или фазовых
сдвигов, определять искажения формы сигналов при прохождении
через различные устройства и т. д.
Более широкое применение в практике измерений нашел
способ одновременного наблюдения нескольких процессов с использованием коммутатора сигналов на входе осциллографа. Осциллограф, построенный по этому принципу, называется многоканальным. Рассмотрим принцип работы многоканального осциллографа более подробно (рис. 3.9).
Каждый входной сигнал Y1, Y2, … YN в сумматорах Σi складывается с постоянным напряжением Ui , которым можно изменять
46
положения i-й оси по вертикали для наблюдения сигнала Yi в
удобном месте экрана. Далее эти сигналы поступают на N входов
коммутатора, последовательно через промежутки времени TK переключающего их на один выход. Выход коммутатора подключен
ко входу Y обычного осциллографа.
U2
YN
UN
Σ2
1
2
ΣN
N
коммутатор N / 1
Y2
U1
Σ1
• • • • • •
Y1
на вх. Y
TK
Рис. 3.9. Коммутатор входных сигналов
Для обеспечения синхронизации, период коммутации TK
должен быть связан с периодом горизонтальной развертки осциллографа TР. Рассмотрим два случая:
1. За период развертки происходит n полных циклов коммутации:
(3.13)
TР = nTК
2. Период коммутации включает m полных циклов развертки:
TК = mTР
(3.14)
Работа коммутатора и выбор периода ТК кроме условий синхронизации (3.13), (3.14) должны определяться следующими факторами. Во-первых, ТК должен быть меньше ~ 0,1 с, чтобы не вызывать заметных глазу мельканий изображения. Во-вторых, из-за
ограниченных быстродействия коммутатора и полосы пропускания осциллографа, ТК должен быть больше некоторого минимального времени, например ~1 мкс.
Для низкочастотных сигналов с периодами порядка 0,1 мс – 1 с
используется условие синхронизации (3.13) и если n = kN, то за
один ход развертки для каждого из N входных сигналов будет по47
строено k элементов (точек) изображения. Высокочастотные сигналы, наблюдаемые с периодом развертки TP ~ 0,01 – 1мкс, должны коммутироваться с условием синхронизации (3.14) и m = kN,
где k – число проходов развертки для каждого из N коммутируемых сигналов.
3.2.4. Стробоскопический осциллограф
Полоса пропускания обычного осциллографа ограничена
частотой fmax порядка нескольких сотен мегагерц и измерение сигналов более высоких частот встречает серьезные затруднения.
Поэтому для наблюдения коротких периодических сигналов,
имеющих широкий спектр частот до нескольких гигагерц, применяют специальные осциллографы, для обработки информации в
которых используется стробоскопический эффект. Суть этого эффекта состоит в том, что при наложении двух быстрых колебательных процессов, имеющих близкие периоды, образуется разностная частота, низкая по сравнению с каждым из исходных колебаний.
Нагляднее всего возникновение стробоскопического эффекта
можно пояснить на примере механического вращения. На рис.
3.10 показан диск с меткой, вращающийся с периодом оборота TC,
который освещается вспышками через равные промежутки времени T0. При T0 = TC + ∆T перемещение метки в моменты вспышек показано на рис. 3.10а и это перемещение наблюдатель отождествляет с вращением диска. Если ∆T << TC , то скорость кажущегося вращения значительно ниже реального. При T0 = TC
метка на диске освещается в одном и том же положении, и это
вызывает кажущуюся неподвижность диска (рис. 3.10б). При
T0 = TC − ∆T направление кажущегося вращения противоположно истинному (рис. 3.10в).
48
а
в
б
T0 = TC + ∆T
T0 = TC
T0 = TC − ∆T
Рис. 3.10. К пояснению стробоскопического эффекта
В стробоскопическом осциллографе на входе включен стробоскопический преобразователь (рис. 3.11), ключ Кл которого под
действием генератора строба ГС через период Т0 на короткое время подключает входной сигнал UC к каналу Y, т. е. осуществляет
стробирование (выборку) отдельных элементов сигнала и выполняет роль импульсного источника света на рис. 3.10. Фильтр нижних частот ФНЧ выполняет сглаживание преобразованного сигнала. Период Т0 должен быть больше, чем ТС (период исследуемого
UC
TP
Кл
ФНЧ
UY
T0
ГС
Рис. 3.11. Стробоскопический преобразователь
сигнала): Т0 = ТС +∆T . На экране осциллографа из отдельных отсчетов строится изображение, по форме совпадающее с исследуемым входным сигналом и растянутое по времени (рис. 3.12). Для
большей наглядности амплитуда сигнала UY на рис. 3.12 увеличена. Пунктирной линией показано сглаживание отдельных отсчётов ФНЧ и вид стробоскопического изображения на экране осциллографа. Для получения хорошего качества изображения, построенного из N отдельных точек, их число должно быть большим. За период преобразованного сигнала TВЫХ число точек
49
TC
+ 1 , и коэффициент трансформации времени
∆T
T
K t = ВЫХ = N − 1 . Коэффициент Kt может достигать нескольких
TC
N=
тысяч, поэтому стробоскопическим методом удаётся исследовать
сигналы с максимальной частотой спектра единицы – десятки гигагерц и выше.
UC
2
1
UY
T0
3
4
TC
5
t
t
Рис. 3.12. Принцип работы стробоскопического осциллографа
Стробоскопические осциллографы широко применяются для
наблюдения высокочастотных сигналов в телекоммуникационных
и вычислительных системах, в научных исследованиях и т. д.
3.3. Панорамные измерения
Панорамные измерения строятся на базе электронного осциллографа и выполняются путем развертки во времени какоголибо входного параметра исследуемого устройства – напряжения,
тока, частоты и т. д. Широкое распространение получили панорамные измерители частотных и передаточных характеристик
элементов в устройствах передачи информации.
3.3.1. Измерения частотных характеристик
Для начала рассмотрим измерение частотных характеристик
без применения панорамного прибора. На рис. 3.13а показана
схема для построения зависимости амплитуды сигнала на выходе
исследуемого устройства ИУ от частоты входного сигнала, т. е.
50
его амплитудно-частотной характеристики (АЧХ). Генератор гармонического сигнала Г вручную перестраивается с одной частоты
на другую в заданном диапазоне, и для каждой частоты измеряются показания амплитуды напряжения при помощи вольтметра
В, подключенного на выход ИУ. По этим данным строится амплитудно-частотная характеристика (рис. 3.13б).
A
а
4
б
3
Г
ИУ
В
2
1
N
f
Рис. 3.13. К построению АЧХ
Ясно, что для качественного построения АЧХ требуется
большое время, поскольку число точек N должно быть велико.
Для ускорения и автоматизации измерений можно применить
генератор гармонического сигнала, частота которого изменяется в
заданных пределах по линейному закону. Управляющее напряжение
можно взять с выхода генератора развертки любого осциллографа.
На рис. 3.14 показана схема измерителя амплитудно-частотных
характеристик, построенного на базе осциллографа. Под действием линейно изменяющегося напряжения с выхода генератора развёртки, генератор, управляемый напряжением (ГУН) перестраивается от минимальной до максимальной частоты. С выхода ГУН
сигнал поступает на ИУ, далее на амплитудный детектор АД и
канал вертикального отклонения осциллографа. На экране осциллографа строится зависимость амплитуды на выходе исследуемого устройства от частоты входного гармонического сигнала, т. е.
АЧХ. Такой прибор называется измерителем частотных характеристик (ИЧХ) и широко используется для контроля аналоговых
устройств и их отдельных элементов в технике связи.
51
ИУ
АД
ГУН
УY
ГР
УX
Y
X
ЭЛТ
Осциллограф
Рис. 3.14. Измерение амплитудно-частотных характеристик
Если вместо амплитудного использовать фазовый детектор, то
прибор будет измерять фазочастотную характеристику ИУ (ФЧХ).
3.3.2. Измерения передаточных характеристик
Для примера рассмотрим измерение вольт-амперной характеристики исследуемого элемента ИЭ (см. рис. 3.15а). К его входу
подключен источник напряжения UВХ – ИН, а к выходу – амперметр А. По показаниям амперметра IВЫХ , полученным для разных
значений UВХ , можно построить график вольт-амперной характеристики ИЭ (рис. 3.15б). Таким же способом строится и любая
другая передаточная характеристика исследуемого элемента или
устройства. Например, для измерения зависимости выходного напряжения от входного (рис. 3.15в) необходимо на рис. 3.15а заменить амперметр на вольтметр. Ясно, что при постоянных измерениях утомительно многократно выполнять одинаковые операции
и вручную строить зависимости для последующего анализа, поэтому можно автоматизировать процесс измерений с применением осциллографа.
в
б
а
I ВЫХ
ИН
ИЭ
А
U ВЫХ
U ВХ
Рис. 3.15. К построению вольт-амперных и передаточных
характеристик
52
U ВХ
На рис. 3.16 показан панорамный измеритель передаточных
характеристик исследуемых элементов ИЭ, называемый характериографом. Линейно-изменяющееся напряжение от генератора
горизонтальной развёртки осциллографа через согласующее устройство СУ1 поступает на вход ИЭ, его выход через согласующее
устройство СУ2 подключен к каналу Y осциллографа. При возрастании напряжения горизонтальной развёртки это воздействие
передаётся на ИЭ. Выходной сигнал исследуемого элемента или
устройства приводит к вертикальному перемещению луча на экране осциллографа, при этом строится зависимость выходного
сигнала от входного. Если входным воздействием является напряжение, а выходным – ток, то на экране имеем вольт-амперную
характеристику исследуемого элемента или устройства.
ИЭ
СУ1
СУ2
УY
ГР
УX
Y
X
ЭЛТ
Осциллограф
Рис. 3.16. Схема для измерения передаточных характеристик
3.4. Измерения спектров
Анализаторы спектра (АС) представляют большой класс радиоизмерительных приборов, предназначенных для исследования
сложных сигналов с изменяющимися во времени параметрами.
При помощи АС могут быть решены следующие задачи:
измерение характеристик частотных составляющих исследуемого сигнала или процесса;
распознавание сложных сигналов и выделение их из помех;
анализ работы каскадов и узлов информационных систем
(линий связи, усилителей, фильтров, преобразователей и т. д.) в
реальных условиях эксплуатации и выявление причин их неисправностей.
53
Рассмотрим основные типы анализаторов спектра.
3.4.1. Параллельный анализатор спектра
вход
АД
1
Ф2
АД
2
.....
2
Ф1
ВУ
N
ФN
.....
.....
1
коммутатор N/1
Блок-схема параллельного АС показана на рис. 3.17. Сигнал
поступает на входное устройство ВУ, где происходит его разделение на N каналов. В каждом канале стоит узкополосный фильтр
Фi, который выделяет часть сигнала, попадающего в полосу его
пропускания. Амплитудный детектор АДi необходим для определения амплитуды сигнала в данном канале. Коммутатор обеспечивает последовательный опрос всех N каналов.
выход
АД N
Tk
Рис. 3.17. Параллельный анализатор спектра
Если на выход коммутатора подключить канал вертикального отклонения осциллографа, а его горизонтальную развертку
синхронизировать с работой коммутатора таким образом, чтобы
за один рабочий ход развертки коммутатор опрашивал все каналы, то на экране осциллографа будет виден амплитудный спектр
исследуемого сигнала.
Достоинством параллельного АС является малое время анализа, поскольку обработка сигнала и построение спектра при одинаковых полосах пропускания всех фильтров ∆f происходит за
время ∆t ≈1/∆f. Конечно, при этом следует помнить, что для построения спектров необходимо использовать большое число кана-
54
лов порядка нескольких десятков или сотен. Это усложняет конструкцию анализатора и затрудняет его применение на практике.
Более широкое развитие получили АС последовательного
типа.
3.4.2. Последовательный анализатор спектра
Рассмотрим принцип действия последовательного АС с преобразованием частоты (рис. 3.18).
вход
ВУ
СМ
fC
Ф
fr
ГУН
У
АД
Y
f0
ГПН
X
И
Рис. 3.18. Последовательный АС с преобразованием частоты
Анализируемый сигнал, частота которого лежит в диапазоне
fMIN – fMAX , поступает на входное устройство ВУ, где происходит
его усиление или ослабление до необходимого уровня. Пунктиром выделен преобразователь частоты, в который входят: смеситель СМ, генератор, управляемый напряжением ГУН и полосовой
фильтр Ф с узкой полосой пропускания ∆f, настроенный на частоту f0. С преобразователя частоты после дополнительного усиления
в усилителе У и детектирования в амплитудном детекторе АД
сигнал поступает на пластины вертикального отклонения осциллографической трубки, служащей индикатором И. Для управления перестройкой ГУН и получения горизонтальной развертки
индикатора предназначен генератор пилообразного напряжения
ГПН.
На канал горизонтального отклонения X индикатора подается сигнал с ГПН. Этот же сигнал управляет частотой перестройки
ГУН по закону:
fГ = f Н + V t ,
(3.15)
где fН – начальное значение частоты, V – скорость её изменения,
t – текущее время. Будем считать, что в преобразователе частоты
55
выделяется разностная частота, поэтому в каждый момент времени на входе усилителя вертикального отклонения сигнал с частотой f0 по амплитуде будет пропорционален составляющим исходного сигнала вблизи частот:
fС (t) = f0+fГ = fН + f0 + V t,
(3.16)
Если выбрать начальное и конечное значения частот ГУН (т. е.
частот в моменты времени t = 0 и t = TЦ , когда луч на экране индикатора занимает самые крайние положения) исходя из условий:
fН + f0 = fMIN и fН + f0 + V TЦ = fMAX,
(3.17)
то за цикл работы длительностью ТЦ будут проанализированы все
частоты от fMIN до fMAX , а на экране индикатора можно наблюдать
спектр исходного процесса S(f). Для удобства анализа спектра в
тракт вертикального отклонения включен амплитудный детектор,
тогда отклонения по оси Y будут одного знака, а изображение на
экране осциллографа станет отображать амплитудный спектр сигнала A(f) = │S(f) │.
Наиболее важными характеристиками АС являются: разрешающая способность и время анализа. Разрешающая способность есть наименьшее расстояние по частоте между двумя составляющими спектра, которые еще не сливаются на экране индикатора. Разрешающая способность определяется шириной полосы
пропускания ∆f фильтра. Время анализа есть длительность периода развертки спектра, т. е. ТЦ. Покажем, что между ТЦ и ∆f существует зависимость: нельзя создать АС с заданным значением
∆f и сколь угодно малым временем ТЦ и, наоборот, при заданном
времени анализа разрешающая способность не может быть меньше некоторой величины. Это так называемый принцип неопределенности Гренандера.
Известно, что запаздывание сигнала ∆t при прохождении через избирательную систему с полосой пропускания ∆f определяется соотношением:
∆t ≈
1
.
∆f
(3.18)
Поэтому необходимо, чтобы время перестройки анализатора с
произвольной частоты fC на частоту fC + ∆f было бы не меньше интервала ∆t из (3.18). Из выражения (3.16) имеем: fС = fН + f0 + V t1 ,
56
fС + ∆f = fН + f0 + V t2, где t1 и t2 – моменты прохождения составляющих спектра с частотами fC и fC + ∆f соответственно. Вычитая
из второго равенства первое, получаем:
∆f = V ( t 2 − t1 ) ≥ V
1
; ∆f 2 ≥ V .
∆f
(3.19)
Таким образом, скорость изменения частоты ГУН не может
превышать величины ∆f 2 , а время анализа:
TЦ =
f MAX − f MIN
V
≥
f MAX − f MIN
∆f 2
;
(3.20)
Ограничения (3.19), (3.20) становятся очень тяжелыми для
низкочастотных анализаторов спектра, когда ∆f малы. Так, при
∆f = 0,01 Гц, fMIN = 0, fMAX = 2 Гц, V ≤ 10-4 Гц/с, а TЦ ≥ 2 · 104 с ≈ 6
часов. Ясно, что АС с таким большим временем измерений не
может использоваться на практике. Как отмечалось ранее, анализаторы параллельного типа с N каналами позволяют уменьшить
время анализа в N раз, но очень сложны при большом числе каналов.
Существует другая возможность значительного уменьшения
времени анализа низкочастотных спектров без существенного
увеличения сложности АС и при сохранении высокой разрешающей способности измерений.
3.4.3. Трансформация спектра
Если преобразовать низкочастотный сигнал в высокочастотный, то можно ускорить получение его спектра, используя описанный ранее последовательный АС. Для преобразования сигнала
по частоте применяется трансформатор спектра (рис. 3.19а), основу которого представляет аналоговое или цифровое запоминающее устройство ЗУ.
б
a
A
вход
УЗ
ЗУ
f3
УЧ
выход
fСЧ
x
f1 f 2
n
nf2
nf1
f
Рис. 3.19. Трансформатор спектра
57
Запись сигнала в ЗУ происходит через устройство записи УЗ,
которое определяет скорость записи в соответствии с частотой fЗ .
Чтение данных устройством чтения УЧ происходит с более высокой скоростью считывания fСЧ = nfЗ . Множитель n определяет коэффициент трансформации спектра и может быть порядка сотен
или тысяч. На рис. 3.19б показано преобразование спектра, содержащего две составляющие с частотами f1 и f2. Как видно, происходит перенос спектра в высокочастотную область и увеличение расстояния между частотными составляющими в n раз. Поэтому для получения разрешающей способности как у АС без
трансформатора, полосу пропускания фильтра можно увеличить
также в n раз. Как следует из формулы 3.20, при этом время анализа TЦ уменьшится в n раз и будет приемлемым даже в случае
измерения низкочастотных спектров. Необходимо учитывать, что
разрешающая способность АС σ может быть достигнута только
при записи отрезка исследуемого процесса длительностью
ТЗ ≥ 1/σ. Для примера из пункта 3.4.2 это время составляет 100 секунд. Поэтому общее время анализа спектра при использовании
трансформатора будет равно ТЗ + TЦ , а при большом n из-за того,
что ТЗ >>TЦ, примерно ТЗ.
Таким образом, трансформация спектра с использованием
запоминающего устройства (в современных приборах, как правило, цифрового типа) позволяет значительно сократить время анализа при исследовании низкочастотных процессов. При этом усложнение АС за счет использования цифровых запоминающих
устройств не приводит к значительному удорожанию прибора.
Заметим также, что многие современные анализаторы спектра
строятся с использованием цифровых фильтров и методов обработки сигнала, без применения аналоговых устройств.
Задания и вопросы для самоконтроля
1.
2.
3.
4.
5.
6.
58
Для чего применяются осциллографические методы измерений?
Опишите устройство и назначение элементов ЭЛТ.
Приведите основные параметры ЭЛТ.
Поясните принцип построения изображения на экране осциллографа.
Что называется синхронизацией изображения и что будет при ее
отсутствии?
Для чего выполняется гашение обратного хода?
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
Опишите структурную схему типового осциллографа и назначение его основных элементов.
Объясните что такое «открытый» и «закрытый» входы осциллографа?
Для чего предназначены каналы X, Y и Z?
Назначение генератора развертки, вид и основные параметры
выдаваемого им напряжения.
Поясните основные принципы получения пилообразного напряжения, их достоинства и недостатки.
Как на экране осциллографа можно получить круговую или спиральную развертки?
Объясните назначение и принцип действия запоминающего осциллографа.
Для каких целей применяются многолучевые и многоканальные
осциллографы? В чем отличие между ними?
Опишите работу многоканального осциллографа и варианты
синхронизации низкочастотных и высокочастотных процессов.
Объясните стробоскопический принцип построения изображения на экране осциллографа и работу стробоскопического преобразователя на его входе.
Укажите область применения стробоскопических осциллографов.
Как можно выполнять измерения АЧХ с помощью осциллографа?
Приведите принцип построения вольт-амперных и передаточных характеристик устройств и объясните применение для этих
целей осциллографа.
Каковы области применения анализаторов спектра?
Опишите принцип действия параллельного анализатора спектра.
Опишите принцип действия анализатора спектра последовательного типа.
Сравните достоинства и недостатки последовательного и параллельного анализаторов спектра.
Объясните принцип неопределенности Гренандера. В чем
сложность измерения спектров низкочастотных сигналов?
Обоснуйте необходимость трансформации спектра и опишите
работу анализатора спектра, выполняющего такое преобразование.
59
Глава 4
ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
И МЕТОДЫ ИЗМЕРЕНИЙ
Цифровые преобразователи широко используются для построения современных средств измерений. К
таким преобразователям относятся цифро-аналоговые
преобразователи (ЦАП) для преобразования цифрового кода в аналоговые величины и аналого-цифровые
преобразователи (АЦП) для обратного преобразования аналоговых величин в цифровой код. В измерительных устройствах ЦАП применяются для сопряжения цифровых и аналоговых узлов, на выходе цифровых вычислителей при визуальном наблюдения за
исследуемым процессом, передачи данных по линиям
связи и т.д. АЦП используются для работы с различными входными величинами – напряжением, током,
мощностью, частотой и т.д. и служат для дискретизации по времени и квантования значений входного
сигнала с одновременным преобразованием этих значений в код. Измерения фазы, частоты и времени
проще и точнее выполнять цифровыми методами, используя аналоговые каскады только на входах таких
приборов.
4.1. Цифро-аналоговые преобразователи
Наибольшее распространение в измерительных приборах получили ЦАП для преобразования двоичного позиционного кода в
напряжение (ПКН) двух основных типов:
– с матрицей весовых резисторов;
– с матрицей R-2R.
60
4.1.1. ЦАП с матрицей весовых резисторов
Рассмотрим сначала более простой ЦАП с матрицей весовых
резисторов (рис. 4.1).
Схема состоит из операционного усилителя ОУ с цепью отрицательной обратной связи в виде резистора RОС, весовой резистивной матрицы из резисторов R0 – Rn-1, которая питается постоянным опорным напряжением UОП и набора ключей Кл0 – Клn-1.
Ключи управляются весовыми коэффициентами соответствующих
разрядов двоичного позиционного входного кода, заданного nразрядным двоичным числом A: если в данном разряде 1, то ключ
замкнут, если 0, то разомкнут. Резисторы матрицы имеют значения:
Ri =
UОП
R0
, i = 0...( n − 1 ) .
i
2
Rn-1
Rn-2
(4.1)
R0
RОС
Клn-2
Клn-1
an-1
Кл0
an-2
1
a0
ОУ
UВЫХ
0
Рис 4.1. ЦАП с матрицей весовых резисторов
На входе ОУ происходит суммирование токов через подключенные резисторы:
n −1
I ВХ = ∑ I i , где I i =
i =0
U ОП
⋅ ai .
Ri
Если ai = 0 , то I i = 0 , если ai = 1 , то I i =
(4.2)
U ОП
.
Ri
Подставляя в выражение (4.2) сопротивления матрицы из
(4.1), имеем:
61
I ВХ
U
= ОП
R0
n −1
∑
i =0
2 i ⋅ ai =
U ОП
A.
R0
(4.3)
Выходное напряжение в схеме инвертирующего усилителя,
по которой включен ОУ, равно:
U ВЫХ = − I ВХ ⋅ RОС = −
RОС
U ОП ⋅ A .
R0
(4.4)
Таким образом, выходное напряжение ЦАП пропорционально значению входного кода A и определяется параметрами схемы –
RОС , R0 , U ОП . Знак минус легко компенсировать, выбрав отрицательное напряжение UОП .
Недостатком данной схемы ЦАП является значительное различие резисторов младшего и старшего разрядов, равное 2n-1. При
большом числе разрядов входного кода это различие может быть
таким большим, что изготовление матрицы, особенно при выполнении ЦАП в виде микросхемы, становится невозможным. Например, даже при n = 8 , различие резисторов составляет 128 раз.
Кроме того, требования к точности выполнения резисторов значительно различаются. Действительно, ошибка в задании тока резистором старшего разряда не должна превышать ток, протекающий
через резистор младшего разряда. Поэтому самые высокие требования по точности изготовления предъявляются к резистору
старшего разряда матрицы – его точность должна быть в 2n-1 раз
выше точности изготовления резистора младшего разряда. Например, если резистор R0 выполнен с точностью 10 %, то при n = 8
резистор старшего разряда матрицы R7 должен иметь погрешность
менее 0,1 %, что во многих случая трудноосуществимо.
Достоинством данного ЦАП является сравнительная простота схемы, поскольку на каждый разряд матрицы требуется один
резистор.
4.1.2. ЦАП с матрицей R-2R
Для устранения недостатков предыдущего ЦАП используется
более сложная матрица R-2R (рис. 4.2). В каждом её разряде задействовано по два резистора, их величины остаются постоянными и не зависят от номера разряда.
62
R
Un-1
Uоп
R
Un-2
2R
2R
2R
Клn-1
Клn-2
Кл0
an-1
an-2
1
U0 2R
RОС
a0
ОУ
UВЫХ
0
Рис 4.2. ЦАП с матрицей R-2R
Матрица R-2R построена таким образом, что напряжение Ui в
каждом ее последующем узле в два раза меньше, чем в предыдущем. Действительно, рассматривая самый младший узел матрицы
с номером i = 0, можно увидеть, что если ключ Кл0 в правом положении, то два резистора величиной 2R оказываются включенными параллельно и их общее сопротивление равно R. Поскольку
напряжение U0 в этом узле определяется делителем напряжения
из двух резисторов одинаковой величины R, то U 0 =
1
U 1 . Если
2
ключ Кл0 в левом положении, то нижний вывод резистора подключен к инвертирующему входу ОУ. Известно, что разность напряжений между двумя входами ОУ пренебрежимо мала, поэтому
можно считать, что потенциал нижнего вывода резистора равен
нулю, два резистора величиной 2R и в этом случае также можно
считать включенными параллельно, и, следовательно, U 0 =
1
U1
2
независимо от положения ключа. Рассуждая аналогичным образом и учитывая, что справа от любого узла стоят два последовательно включенных резистора величиной R , можно доказать,
что напряжение в узлах матрицы определяется рядом:
63
1
1
1
U n −1 = U ОП , U n − 2 = U n −1 = U ОП , U n −3 = U n − 2 = U ОП и т. д.
2
2
4
Таким образом, для произвольного узла с номером i имеем:
Ui =
1
2
n −i −1
U ОП , i = 0...( n − 1 ) .
(4.5)
На входе ОУ происходит суммирование токов:
n −1
I ВХ = ∑ I i , где I i =
i =0
Ui
⋅ ai .
2R
(4.6)
Подставляя в это выражение значения Ui из (4.5), окончательно получаем:
n −1
I ВХ = ∑
i =0
n −1
Ui
U ОП
U ОП n−1 i
U ОП
⋅ ai = ∑
⋅
a
=
⋅
a
=
A (4.7)
2
∑
i
i
n
n
n −i −1
2R
2 R i =0
2 R
i =0 2 R ⋅ 2
и выходное напряжение ЦАП равно:
U ВЫХ = − I ВХ ⋅ RОС = −
RОС
U ОП ⋅ A .
2n R
(4.8)
Таким образом, выходное напряжение ЦАП пропорционально значению входного кода A. Единицу преобразования определяет
множитель,
состоящий
из
параметров
схемы
–
RОС , R , U ОП , n . Достоинством схемы является небольшое
(всего в два раза) различие всех резисторов матрицы и невысокие
требования к точности их выполнения. Поэтому данная схема широко используется при изготовлении ЦАП в виде интегральных микросхем и применяется в различных измерительных преобразователях.
4.1.3. Основные параметры и применение ЦАП
Все параметры ЦАП можно разделить на две группы: статические и динамические. К статическим параметрам относятся: шаг
квантования, разрешающая способность, погрешность преобразования, динамический диапазон выходного сигнала, характеристики входного кода и некоторые другие.
К динамическим параметрам относятся: время установления
выходного сигнала, максимальная частота преобразования, динамическая погрешность и т. д. Рассмотрим некоторые из этих параметров.
64
Шаг квантования равен отношению разности максимального и минимального выходных напряжений к количеству состояний ЦАП минус единица. Поскольку число состояний определяется разрядностью входного кода n, то шаг квантования h находится из простого соотношения:
h=
U ВЫХ MAX − U ВЫХ MIN
2 −1
n
.
(4.9)
Формула (4.9) справедлива для равномерного квантования с
постоянным шагом.
Разрешающая способность определяется как величина, равная изменению выходного напряжения ЦАП при изменении входного кода на единицу младшего разряда. В соответствии с этим
определением разрешающая способность равна шагу квантования
h . В относительных единицах разрешающая способность µ вычисляется по формуле:
µ=
U ВЫХ MAX
1
h
.
= n
− U ВЫХ MIN 2 − 1
(4.10)
Очевидно, что чем больше разрядность ЦАП, тем выше его
относительная разрешающая способность.
Динамический диапазон равен отношению разности максимального и минимального выходных напряжений ЦАП к его разрешающей способности. Динамический диапазон обычно измеряется в децибелах:
D = 20 lg
U ВЫХ MAX − U ВЫХ MIN
h
.
(4.11)
Погрешность преобразования разделяется на погрешность
нелинейности и дифференциальную погрешность. На рис. 4.3
точками показана статическая характеристика преобразования
ЦАП, по горизонтальной оси отложены числовые значения входного кода A , а по вертикальной – выходное напряжение. Погрешностью нелинейности называется максимальное отклонение выходного напряжения от идеальной линейной зависимости во всем
диапазоне преобразования. На рис. 4.3 такое отклонение наблюдается для напряжения U3 и оно обозначено δ. Дифференциальной погрешностью называется максимальное отклонение от линейной зависимости у двух выходных напряжений для соседних
состояний ЦАП. На рис. 4.3 это соответствует напряжениям U1 и
65
U2 и дифференциальная погрешность в этом случае равна
ξ = U 2 − U1 − h .
U ВЫХ
U ВЫХ MAX
U3
U2
U1
U ВЫХ MIN
δ
0 1 2 3
• • •
2n-1
А
Рис. 4.3. Статическая характеристика преобразования ЦАП
Быстродействие ЦАП характеризуется временем установления выходного сигнала и максимальной частотой преобразования.
Временем установления называется интервал, в течение которого выходное напряжение изменяется в заданных пределах (рис.
4.4). Время установления показывает, через какой промежуток
после поступления входного кода в момент t0 напряжение на выходе ЦАП приблизится к установившемуся значению. Для обычных преобразователей tУСТ лежит в диапазоне 10–1000 нс, а для
современных скоростных ЦАП этот показатель составляет единицы
наносекунд. Максимальная частота преобразования есть величина, обратная времени установления. Современные ЦАП способны выполнять преобразования со скоростью до 109 раз в секунду.
U ВЫХ
U ВЫХ 2
0.95 ∆U
∆U
U ВЫХ 1
tУСТ
t0
t
Рис. 4.4. К определению времени установления ЦАП
66
При использовании ЦАП обычно предусматривают сглаживание его выходного сигнала с использованием интегратора или
фильтра нижних частот (см. рис. 4.5а). Полосу среза ФНЧ fСР выбирают таким образом, чтобы через него проходили все полезные
частотные составляющие сигнала с выхода ЦАП и задерживались
компоненты с более высокими частотами. Такая фильтрация позволяет сгладить выходной сигнал (рис. 4.5б).
а
вх. код
....
ЦАП
б
U1
ФНЧ
U2
fСР
U2
U1
t
t
Рис. 4.5. Типовое включение ЦАП
Различие между U1 и U2 называется динамической погрешностью и зависит от скорости поступления входных данных, а
также от постоянной времени интегратора или частоты среза
ФНЧ.
4.2. Аналого-цифровые преобразователи
Хотя разработаны и применяются АЦП для работы с разнообразными входными величинами – током, мощностью, фазой,
частотой, временем и т. д. – наибольшее распространение получили преобразователи напряжение – код (ПНК).
Существует несколько основных методов построения таких
АЦП.
4.2.1. Параллельный АЦП
Для простоты ограничимся тремя разрядами выходного кода и
рассмотрим схему параллельного трехразрядного АЦП (рис. 4.6).
Схема состоит из матрицы одинаковых резисторов величиной R, семи компараторов К1 – К7 и преобразователя кода на их
выходах в трехразрядный двоичный позиционный код. Для работы преобразователя необходимо опорное постоянное напряжение
U0 .
67
U ВХ
U7 = U0
K1
R
U4 =
U3 =
U2 =
U0
×5
7
U0
×4
7
U0
×3
7
U0
×2
7
U1 =
U0
7
K2
R
K3
R
K4
R
K5
R
Вых
U5 =
U0
×6
7
Преобразователь кодов
U6 =
K6
R
K7
R
Рис. 4.6. Параллельный АЦП
Входное напряжение UВХ, над которым выполняется аналогоцифровое преобразование, поступает на неинвертирующие входы
всех компараторов, на их инвертирующие входы с матрицы подаются напряжения Ui. В зависимости от значения UВХ на выходах
компараторов напряжение может принимать высокий (1) или низкий (0) уровни. В таблице 1 показано значение кода на выходах
компараторов и соответствующее трехразрядное двоичное число
после преобразователя.
68
Таблица 1
UВХ
К7 Вых.
К1
К2
К3
К4
К5
К6
UВХ <U1
0
0
0
0
0
0
0
000
U1<UВХ <U2
0
0
0
0
0
0
1
001
U2<UВХ <U3
0
0
0
0
0
1
1
010
U3<UВХ <U4
0
0
0
0
1
1
1
011
U4<UВХ <U5
0
0
0
1
1
1
1
100
U5<UВХ <U6
0
0
1
1
1
1
1
101
U6<UВХ <U7
0
1
1
1
1
1
1
110
U7 <UВХ
1
1
1
1
1
1
1
111
Основное достоинство параллельного АЦП заключается в его
высоком быстродействии, так как все компараторы переключаются практически одновременно, а задержка в преобразователе кода
мала. Поэтому преобразование входного напряжения в код происходит за один такт работы АЦП, что позволяет строить очень быстродействующие устройства со временем преобразования 1–10 нс.
Как видно из таблицы, между числом компараторов N и разрядностью выходного кода n существует простое соотношение:
N = 2 n − 1 . Если необходимое число разрядов невелико, то изготовление параллельного АЦП не вызывает проблем, но даже для
n = 8 необходимо 255 компараторов, что может создать затруднения при реализации АЦП. Заметим, что для получения высокой
точности преобразования требуется применение 10–16-разрядных
АЦП и сложность параллельных АЦП становится чрезмерно высокой. Это главный недостаток подобных преобразователей.
4.2.2. АЦП поразрядного уравновешивания
Схема АЦП поразрядного уравновешивания показана на рис.
4.7. Основой схемы является регистр управления РУ, управляемый от генератора тактовых импульсов ГТИ. Запоминающий регистр ЗР хранит код, поступающий от РУ в течение длительности
такта, и передает этот код на ЦАП и на выход преобразователя.
69
U ВХ
пуск
К
готово
ГТИ
РУ
выходной
код
ЗР
U ЦАП
ЦАП
U0
Рис. 4.7. АЦП поразрядного уравновешивания
Схема работает следующим образом. При поступлении сигнала «Пуск», РУ выставляет в старшем разряде кода «1», а в остальных разрядах «0» и этот код передается на ЗР. С выхода ЗР
код поступает на ЦАП, где преобразуется в аналоговый сигнал
UЦАП и далее поступает на компаратор К, в котором происходит
сравнение входного напряжения и напряжения на выходе ЦАП.
Если в результате сравнения UЦАП ≥ UВХ , то на выходе компаратора будет логический ноль, что является признаком для РУ оставить в данном разряде выставленную ранее «1». Если UЦАП < UВХ ,
на выходе компаратора будет логическая единица, и по этому
признаку РУ сбросит выставленную ранее «1» в «0». На следующем такте РУ перейдет к обработке следующего разряда и по результатам сравнения UЦАП и UВХ запишет в него «0» или «1». Работа преобразователя будет продолжаться, пока не закончится
обработка самого младшего разряда и на выходе не появится код
числа, соответствующий входному напряжению. Таким образом,
время преобразования определяется длительностью одного такта
t0 и числом разрядов выходного кода n:
t ПР = n ⋅ t0
(4.12)
При большом количестве разрядов АЦП поразрядного уравновешивания имеет значительное время преобразования, что яв70
ляется его главным недостатком. К достоинствам следует отнести
высокую точность преобразования и низкую стоимость данного
АЦП.
В таблице 2 показан цикл работы четырехразрядного АЦП
поразрядного уравновешивания при UВХ = 2,6 В, U0 = 8 В.
Таблица 2
К
Такт
Код РУ
Код ЗР
UЦАП, В
1
1000
1000
4
0
2
0100
0100
2
1
3
0010
0110
3
0
4
0001
0101
2,5
1
После окончания преобразования выходной код будет 0101,
что соответствует напряжению 2,5 В. Разница 0,1 В – ошибка преобразования. Ясно, что для ее уменьшения необходимо увеличивать число разрядов.
4.2.3. АЦП с генератором пилообразного напряжения
K
UБ
R
S
UА
T
UВ
&
UГ
+1 CT 2
f0
ГТИ
ГПН
R
a0
a1
a2
....
U ВХ
a n-1
выходной код
Схема АЦП с генератором пилообразного напряжения показана на рис. 4.8. Здесь: К – компаратор; Т – RS триггер; ГПН – генератор пилообразного напряжения; ГТИ – генератор тактовых
импульсов, следующих с частотой f0; & – логический элемент
«И»; СТ2 – двоичный суммирующий счетчик.
пуск
Рис. 4.8. АЦП с генератором пилообразного напряжения
71
АЦП работает следующим образом (см. рис. 4.9). При поступлении сигнала «Пуск» триггер устанавливается в «1», а счетчик –
в «0». Одновременно ГПН начинает вырабатывать линейно возрастающее напряжение. В это время на выход элемента «И», который исполняет роль селектора, проходят импульсы и последовательно заполняют счетчик, увеличивая значение выходного кода. Когда напряжение ГПН UA сравняется с UВХ, на выходе компаратора появляется «1», что заставляет триггер сброситься в «0».
При этом селектор закрывается, счет прекращается и на выходе
сохраняется код входного сигнала. Напряжение на выходе триггера UВ в виде прямоугольного импульса формирует временные ворота длительностью TИЗМ .
Время измерения в этом преобразователе не остается постоянным, а зависит от напряжения UВХ :
TИЗМ =
U ВХ
,
VПН
(4.13)
где VПН – скорость изменения пилообразного напряжения. Обычно в паспортных данных приводят максимальное время измерений для наибольшего входного сигнала UВХ MAX .
Точность работы этого АЦП зависит от числа импульсов,
прошедших за время измерений через временные ворота. Как известно, точность отсчета любого цифрового прибора ограничена
единицей младшего разряда ЕМР. Поэтому относительная ошибка
измерений не может быть меньше 1/N и для ее уменьшения необходимо получить бόльшее число импульсов, прошедших через
временные ворота. Это возможно при увеличении частоты тактового генератора f0 или при уменьшении скорости нарастания пилообразного напряжения VПН. Первый путь заставляет использовать более высокочастотные, а, следовательно, и более дорогие
элементы. Второй – приводит к увеличению времени преобразования. Обычно TИЗМ составляет единицы–десятки миллисекунд.
72
U ГТИ
UА
T0 =
1
f0
t
U ВХ
t
UБ
t
UВ
TИЗМ
UГ
t
N
t
Рис. 4.9. Диаграммы работы АЦП с генератором пилообразного
напряжения
4.2.4. АЦП с ЦАП в цепи обратной связи
Точность предыдущего АЦП во многом зависит от линейности пилообразного напряжения на выходе ГПН. Поскольку задача
создания генератора с хорошей линейностью достаточно сложна,
можно этот аналоговый элемент заменить на ЦАП и сформировать ступенчато-нарастающее напряжение, используя обратную
связь с выхода преобразователя на его вход (рис. 4.10, обозначения как на рис 4.8).
73
пуск
UА
R
T
&
UГ
+1 CT 2
f0
S
ЦАП
UВ
U0
a0
a1
a2
ГТИ
R
...
a n-1
выходной код
K
UБ
....
U ВХ
Рис. 4.10. АЦП с ЦАПом в цепи обратной связи
При поступлении сигнала «Пуск» триггер открывает элемент
«И» и импульсы с ГТИ поступают на счетчик. На выходе счетчика
появляется возрастающая последовательность выходного двоичного кода, одновременно этот код подаётся на ЦАП, на выходе
которого образуется ступенчато-нарастающее напряжение
(рис. 4.11). Это напряжение в компараторе сравнивается с входным сигналом. При UА > UВХ на выходе компаратора появляется
логическая единица, триггер сбрасывается в «0», элемент «И» закрывается и в счетчике сохраняется выходное значение кода, соответствующее входному напряжению. В остальных точках схемы
диаграммы напряжений такие же, как и на рис. 4.9.
UА
U ВХ
TИЗМ
t
Рис. 4.11. Диаграмма напряжения на выходе ЦАП
74
Разрядность ЦАП должна соответствовать разрядности счетчика, а максимальное напряжение на его выходе должно превышать UВХ МАХ .
4.3. Измерения интервалов времени, частоты и фазы
4.3.1. Измерение интервалов времени
R
старт U 1
S
T
UА
&
UБ
+1 CT 2
f0
a0
a1
a2
....
стоп U 2
ГТИ
R
a n-1
выходной код
При контроле и диагностике устройств передачи информации возникает необходимость измерять интервалы времени с высокой точностью. Такие измерения проводятся для оценки скорости срабатывания различных устройств, времени запаздывания
сигналов, временных параметров импульсов и т. д. Рассмотрим
принцип измерения интервалов времени по схеме, показанной на
рис. 4.12.
Рис. 4.12. Схема для измерения интервалов времени
По сигналу «Старт» RS триггер переходит в единичное состояние и открывает схему «И», одновременно двоичный счетчик
СТ2 по сигналу сброса R устанавливается в нулевое состояние и
начинает подсчет импульсов от ГТИ с частотой f0. В момент прихода сигнала «Стоп» триггер сбрасывается в «0», схема «И» закрывается и счетчик сохраняет значение кода, соответствующее
измеренному промежутку времени. Интервал между сигналами
«Старт» и «Стоп» называется временными воротами (рис. 4.13).
75
U ГТИ
T0 =
1
f0
t
U1
старт
t
U2
стоп
t
UA
TX
UБ
t
N
t
Рис. 4.13. Диаграммы работы измерителя временных интервалов
Если бы за длительность временных ворот укладывалось целое число периодов Т0, то измеряемый интервал ТХ был бы:
TX = N X ⋅ T0 ,
(4.14)
где N X – число импульсов, прошедших через временные ворота.
Поскольку в измеряемом промежутке времени содержится дробное число периодов Т0, то действительный интервал Т *X будет
лежать в диапазоне:
( N X − 1 ) ⋅ T0 < T X* < ( N X + 1 ) ⋅ T0 .
(4.15)
При этом абсолютная ошибка измерений может доходить до
значений:
76
∆T X = T X* − T X = ±T0 ,
(4.16)
а соответствующая ей относительная ошибка:
δT =
∆T X
TX
=±
T0
1
.
=±
N X T0
NX
(4.17)
Для увеличения точности измерений необходимо уменьшать
период T0 ГТИ, тогда за время TX укладывается большее число NX
и ошибка измерений уменьшается.
4.3.2. Измерение частоты
+1 CT 2
T
А
UБ
R
a n-1
R
&
ГТИ
f0
+1 CT 2
Б
R
a0
a1
a2
....
U1
S
UВ
b0
b1
b2
....
старт
&
выходной код
U X , fX
....
Для измерения частоты цифровым методом сначала необходимо входной периодический сигнал произвольной формы, следующий с частотой fX , преобразовать в прямоугольные импульсы.
Эти импульсы подаются на схему частотомера, показанную на
рис. 4.14. Прибор состоит из RS триггера, двух селекторов импульсов на логических элементах «И», двух двоичных суммирующих счетчиков А и Б и генератора тактовых импульсов. Счетчик А имеет n разрядов и определяет выходной код, а счетчик
Б – m разрядов и задает время измерения TИЗМ.
bm-1
UА
Рис. 4.14. Схема частотомера
77
Рассмотрим функционирование частотомера по диаграммам
его работы, показанным на рис. 4.15.
U ГТИ
U1
T0 =
1
f0
t
старт
t
UA
UБ
UX
UВ
t
TИЗМ
TX =
1
fX
NX
t
t
t
Рис. 4.15. Диаграммы работы частотомера
При подаче стартового импульса оба счетчика обнуляются,
триггер устанавливается в единицу и открывает селекторы импульсов. Через верхний селектор импульсы с частотой fX поступают на счетчик А, а через нижний селектор импульсы от ГТИ с
частотой f0 – на счетчик Б. Так продолжается до тех пор, пока на
выводе счетчика Б с номером bm-1 не появится логическая «1».
Этот сигнал сбросит триггер в нулевое состояние, что закроет оба
элемента «И» и счетчики прекратят счет. Время измерения зависит от частоты f0 и разрядности счетчика Б:
78
TИЗМ =
1 m−1
⋅2 .
f0
(4.18)
Если за время TИЗМ укладывается целое число периодов измеряемой частоты fX, то на выходе счетчика А будет содержатся n
разрядный двоичный код:
NX =
TИЗМ
= TИЗМ f X ,
TX
(4.19)
по которому легко найти измеряемую частоту:
fX =
NX
.
TИЗМ
(4.20)
С учетом произвольного соотношения между TИЗМ и fX , когда
при прохождении импульсов через временные ворота может пропасть один импульс или пройти лишний, выражение (4.20) следует заменить условием:
N X −1
N +1
,
≤ f X* ≤ X
TИЗМ
TИЗМ
(4.21)
где f X* – действительное значение измеряемой частоты, а +1, –1
учитывают погрешность измерений, вызванную ЕМР. Тогда
ошибка измерения может доходить до значений
∆f =
±1
TИЗМ
(4.22)
и относительной погрешности
δf =
∆f
fX
=
±1
±1
=
.
NX
f X ⋅ TИЗМ
(4.23)
Из выражений (4.22) и (4.23) видно, что для данного метода
измерения частоты единственной возможностью уменьшения погрешности является увеличение времени измерения.
4.3.3. Измерение низкой частоты
Как видно из описанного в предыдущем пункте методе измерения частоты, для достижения удовлетворительной точности в
79
T
UБ
+1 CT2
T
UА
старт
U1
&
R
1
R
T/F
a0
a1
a2
....
UX , fX
f0
....
ГТИ
выходной код
случае низких частот необходимо выполнять измерения длительное время. Например, из выражения (4.23) следует, что при измерении частоты вблизи 1 Гц даже для получения не очень высокой
точности (0,1 %) , время измерения должно быть около 1000 с.
Большое время измерения является недостатком описанного метода и заставляет искать другие принципы измерения низких частот.
Рассмотрим схему, показанную на рис. 4.16.
an-1
Рис. 4.16. Частотомер для измерения низких частот
В отличие от предыдущих схем, здесь использован Т триггер,
на информационный вход которого подаётся измеряемый сигнал
UX с частотой fX. В момент поступления сигнала «Старт» триггер
и счетчик сбрасываются в нулевое состояние и схема готова к
приему импульсов. В момент прихода первого импульса измеряемого сигнала после сигнала «Старт», триггер переходит в единичное состояние и открывает элемент «И», а счетчик начинает подсчет импульсов от ГТИ (см. рис. 4.17). По приходу второго импульса измеряемого сигнала триггер возвращается в нулевое состояние и формирует временные ворота длительностью равной
периоду измеряемой частоты TX. После окончания временных ворот в счетчике появляется двоичное значение кода, пропорционального периоду исследуемого сигнала. Зная период, легко вычислить частоту fX . Можно использовать преобразователь кода
времени в код частоты T/F в виде элемента памяти ПЗУ, в котором по адресу, определяемому значением кода времени TX , должны храниться рассчитанные заранее соответствующие этому времени значения кода частоты fX .
Одновременно с окончанием временных ворот на инверсном
выходе триггера появляется «1», которая через логический элемент «ИЛИ» сбрасывает двоичный счетчик. Это необходимо для
80
того, чтобы при формировании новых временных ворот на следующем периоде измеряемого сигнала счетчик показал бы код,
соответствующий этому периоду. В противном случае происходило бы накопление показаний счетчика. Для сохранения выходного кода после сброса счетчика преобразователь T/F должен обладать памятью и сохранять код до окончания следующего цикла.
U ГТИ
T0 =
1
f0
t
U1
старт
t
UX
1
2
t
UА
TX
t
UБ
NX
t
Рис. 4.17. Диаграммы работы частотомера для измерения низких
частот
Если не учитывать ошибку усечения кода в преобразователе
T/F, точность данного метода можно получить, заменяя в формуле
(4.19) в соответствии со схемой частотомера (рис. 4.16) и диаграммами его работы (рис. 4.17) TИЗМ на TX, а fX на f0 :
NX =
TX
= TX f 0 .
T0
(4.19а)
81
Откуда
fX =
f0
NX
(4.20а)
и выражение (4.21) запишется по-другому:
f0
f0
.
< f X* <
N X +1
N X −1
(4.21а)
Тогда ошибка измерений при условии, что N >> 1, будет доходить до значений:
± f 0 ± f X2
∆f = 2 =
NX
f0
(4.22а)
при относительной погрешности:
δf =
∆f
fX
=
± fX
f0
(4.23а)
Из формул (4.22а) и (4.23а) видно, что этот метод имеет малую погрешность при измерении низкочастотных сигналов и точность измерений увеличивается с ростом частоты ГТИ.
4.3.4. Измерение разности фаз
Разность фаз между двумя периодическими сигналами с частотой fC определяется простым соотношением:
∆ϕ = 2π f C ∆ t = 2π
∆t
TC
,
(4.24)
U1
U2
ФУ1
S
ФУ2
R
Т
UA
ИНТ
UС Р
АЦП
вы ход ной к од
где fC и TC – частота и период входных сигналов, ∆t – задержка
одного сигнала относительно другого.
Для измерения разности фаз используется схема, показанная
на рис. 4.18.
Рис. 4.18. Схема для измерения разности фаз с интегратором
82
Два синусоидальных сигнала U1 и U2 с одинаковыми периодами подаются на формирующие устройства ФУ1 и ФУ2, которые
в определенные моменты периода, например, в моменты перехода
синусоидальных напряжений через ноль с отрицательного значения на положительное, на выходе формируют короткие импульсы
(рис. 4.19). Эти импульсы поступают на входы RS-триггера и на
его выходе образуются прямоугольные импульсы с длительностью ∆t, равной задержке сигнала U2 относительно сигнала U1.
Рис. 4.19. Диаграммы работы фазометра с интегратором
На выходе интегратора ИНТ имеем среднее напряжение UСР, которое равно средней за период площади импульсов:
U СР = U M
∆t
TC
= k∆ϕ .
(4.25)
Сравнивая выражения (4.24) и (4.25), видно, что UСР пропорционально измеряемой разности фаз, причем коэффициент пропорциональности k зависит как от высоты импульсов UM , так и от
единиц измерения разности фаз. Для измерения напряжения на
выходе ИНТ в схеме на рис. 4.19 используется АЦП, хотя можно
применить другой измеритель напряжения, например, аналоговый
вольтметр.
Недостатком данного метода определения разности фаз является применение аналогового интегратора, который может вно83
U1
U2
ФУ1
ФУ2
S T1
f0
&
UА
S
1
R
R
старт
T2
UВ
+1 CT2
a0
a1
a2
R
an-1
UБ
....
ГТИ
выходной код
сить существенные ошибки в результаты измерений. Для построения полностью цифрового фазометра используется схема,
показанная на рис. 4.20.
стоп
Рис. 4.20. Схема для измерения разности фаз с подсчетом числа
импульсов
Здесь кроме формирующих устройств использованы два триггера
Т1 и Т2, селектор импульсов, поступающих от ГТИ, на логическом элементе «И» и двоичный счетчик. Т1 так же как в схеме
фазометра на рис. 4.18 формирует прямоугольные импульсы UА,
длительность которых ∆t зависит от измеряемой разности фаз (см.
диаграммы на рис. 4.19, 4.21). Т2 задает сигнал UБ и формирует
время измерения TИЗМ , которое определяется внешними сигналами «Старт» и «Стоп». На выходе селектора & образуются пачки
импульсов UВ, а общее число импульсов NX, поступившее на счетчик за время измерений равно:
NX =
∆t
T0
M,
(4.26)
где M – целое число периодов сигнала TC, уложившихся во временные ворота, т. е. число пачек:
⎧T
⎫
M = ⎨ ИЗМ ⎬ ,
⎩ TС ⎭
где операция {Х } означает вычисление целой части числа X.
84
(4.27)
TC
∆t
UА
t
U ГТИ
UБ
t
TИЗМ
стоп
старт
UВ
NX
t
t
Рис. 4.21. Диаграммы работы фазометра с подсчетом числа импульсов
Подставляя M из этого соотношения в (4.26) и выражая ∆φ из
(4.24) через ∆t/TC , получаем выражение для измеренной разности
фаз в зависимости от числа поступивших на счетчик импульсов и
параметров фазометра:
∆ϕ = 2π
N X T0
.
TИЗМ
(4.28)
Формула (4.28) определяет разность фаз в радианах. Для отсчета ∆φ в градусах необходимо правую часть этого выражения
разделить на 2π и умножить на 360:
∆ϕ = 360
N X T0
.
TИЗМ
(4.28а)
Если, например, TИЗМ/T0 = 1000 и NX = 100, то измеренная
разность фаз равна 36 градусам.
Полученные выражения выведены в предположении, что за
время ∆t укладывается целое число периодов тактовых импульсов
85
T0, а за время TИЗМ – целое число периодов измеряемого сигнала
TC. На самом деле, эти предположения не выполняются и возникают две составляющие погрешности измерений. Первая называется высокочастотной погрешностью и связана с возможным искажением числа импульсов в каждой пачке на ±1 из-за пропадания или добавления импульса. Вторая носит название низкочастотной погрешности и вызвана ошибкой в определении числа пачек на ±1 по тем же причинам. Для уменьшения высокочастотной
погрешности необходимо увеличивать частоту ГТИ, а для уменьшения низкочастотной – увеличивать время измерения.
4.4. Цифровой осциллограф
В ряду современных радиоизмерительных приборов важное
место занимает цифровой осциллограф, в котором для обработки
входных данных и управления режимами работы применяются
цифровые устройства и методы преобразования информации. Рассмотрим типовую блок-схему двухканального цифрового осциллографа, показанную на рис. 4.22.
Здесь исследуемые сигналы UC1 и UC2 через входные устройства ВУ1 и ВУ2 поступают на аналогово-цифровые преобразователи АЦП1 и АЦП2, где преобразуются в цифровой код. Последовательность цифровых данных, соответствующая длительности
рабочего хода развертки TРАБ обычного осциллографа запоминается в буферном устройстве БУ. Дальнейшая обработка информации происходит в микропроцессоре МП по программе, хранимой
в постоянном запоминающем устройстве ПЗУ. Текущие данные и
результаты вычислений записываются в оперативное запоминающее устройство ОЗУ. Управление режимами работы ВУ и АЦП
производится МП через регистр управления РУ. Клавиатура К
служит для оперативного управления режимами работы и обработки данных в цифровом осциллографе, а порт П предназначен
для связи с внешними устройствами, например, с персональным
компьютером для запоминания данных, их сравнения с результатами предыдущих измерений, вторичной обработки по сложным
алгоритмам и т. д.
86
UC1
ВУ1
ОЗУ
АЦП1
ПЗУ
БУ
UC2
ВУ2
И
МП
АЦП2
К
РУ
П
Рис. 4.22. Блок-схема двухканального цифрового осциллографа
Существует упрощенный вариант цифрового осциллографа,
называемый компьютерным осциллографом. Прибор выполнен в
виде приставки к компьютеру, в нём расположены только блоки
слева от пунктирной линии на рис. 4.22. В таком устройстве данные из БУ через стандартный порт (LPT или USB) поступают в
компьютер на обработку и отображение. Через этот же порт происходит управление ВУ и АЦП со стороны компьютера. Кроме
аппаратной части, компьютерный осциллограф обязательно включает программное обеспечение с удобным интерфейсом, напоминающим переднюю панель обычного осциллографа (рис. 4.23).
Оценим скорость поступления информации по входам цифрового осциллографа.
Пусть максимальная частота исследуемого сигнала по каждому каналу равна fМАХ. По теореме Котельникова выборка данных и преобразование их в цифровой код должны происходить с
частотой не ниже 2fМАХ . Обычно используются 8–16-битные АЦП,
тогда за секунду в МП или компьютер должно поступать не менее
(16–32) fМАХ бит информации. Даже если ограничиться сравнительно низкой для аналоговых осциллографов частотой fМАХ = 10
МГц, то окажется, что с учетом двух каналов суммарная скорость
поступления данных будет составлять ~320–640 Мбит/c, что сравнимо и даже превышает максимальную пропускную способность
быстродействующего порта USB. Таким образом передать, а тем
более обработать эти громадные потоки информации стандартными вычислительными средствами в режиме реального времени
практически невозможно.
87
Рис. 4.23. Интерфейс компьютерного осциллографа PCS-32mk
Для выхода из этого затруднения в схеме цифрового осциллографа (см. рис. 4.22) после АЦП, как правило, устанавливается
БУ, предназначенное для запоминания данных за сравнительно
короткий интервал времени, который условно можно назвать, как
у обычного осциллографа «периодом развертки». После завершения одного такого периода БУ прекращает запись данных с АЦП
и начинает передавать их в МП со скоростью, на какую рассчитаны аппаратные средства. Из-за низкой скорости время передачи
может во много раз превышать время записи. После передачи всех
данных в МП происходит запись в БУ новой порции информации и
т. д. Таким образом, анализ входного сигнала происходит циклически, и за сравнительно большое время между циклами программа
обработки успевает выполнить все необходимые операции.
88
Другой способ сокращения скорости поступления данных с
АЦП при исследовании высокочастотных периодических сигналов состоит в применении на входе цифрового осциллографа
стробоскопического преобразователя, описанного в п. 3.2.4. При
этом необходимо убедиться в том, что между соседними отсчетами, следующими через несколько периодов сигнала, не происходили бы заметные изменения его амплитуды и фазы. Для этого
перед входом стробоскопического преобразователя устанавливается фильтр нижних частот, чтобы сигнал на его выходе удовлетворял этим требованиям.
Заметим, что практически все методы осциллографических
измерений, описанные в главе 3, находят применение и дальнейшее развитие в цифровых осциллографах. Это относится к способам получения круговой развертки, панорамным, спектральным и
другим видам измерений. Аналоговые методы преобразования
сигналов, необходимые для реализации этих методов, заменены
соответствующими вычислениями по программе и обработкой
сигналов в цифровых устройствах.
Задания и вопросы для самоконтроля
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
Каково назначение ЦАП и АЦП, ПКН и ПНК?
Поясните схему и принцип действия ЦАП с матрицей весовых
резисторов.
Как устроен и работает ЦАП с матрицей R-2R?
Сравните достоинства и недостатки двух рассмотренных ЦАП.
Приведите схему включения ЦАП и его основные параметры.
Объясните схему и принцип действия параллельного АЦП. В
чем его достоинства и недостатки?
Как выполняется преобразование в АЦП поразрядного уравновешивания? Рассмотрите конкретный пример.
Рассмотрите схему АЦП с генератором пилообразного напряжения и объясните его работу.
Чем отличается от предыдущего преобразователя АЦП с
ЦАП в цепи обратной связи?
Как увеличить точность преобразования в двух последних АЦП?
Объясните принцип измерения интервалов времени и схему
для его реализации.
Что называется «временными воротами»?
Поясните, как выполняются измерения частоты.
Почему при измерении низких частот используется специальная схема?
89
15. Как выполняется измерение разности фаз с использованием
интегратора?
16. Как выполнен и работает фазометр с подсчетом числа импульсов?
17. Что такое низкочастотная и высокочастотная погрешности
измерений разности фаз?
18. Опишите состав и работу цифрового осциллографа.
19. Для чего необходима буферная память в цифровом осциллографе и как рассчитать ее объем?
20. Какой прибор называется компьютерным осциллографом?
90
Заключение
В любой области науки, техники и производства измерения имеют первостепенное значение. Для поддержания
работоспособности систем передачи информации необходимо в режиме реального времени контролировать большой
набор разнообразных параметров. При определении характеристик сложных сигналов следует правильно выбирать
методы и средства измерений, учитывать присущие им достоинства и недостатки, знать потенциальные возможности
используемых методов измерений.
Цель настоящего учебного пособия состоит в том, чтобы изложить основные принципы измерений наиболее важных физических величин и методы построения измерительных приборов, дать читателям основу для самостоятельного
выбора наиболее подходящих методов измерений, научить
правильно оценивать области применения и погрешности
различных радиоизмерительных приборов.
Многие вопросы, обычно рассматриваемые при изучении радиоизмерений в информационных системах, автором
сознательно не включены в учебное пособие. Это связано с
ограниченностью его объема и в основном касается особенностей конструкций средств измерений и их технических
характеристик. Главное внимание было посвящено принципам построения и потенциальным возможностям наиболее
важных методов измерений, используемых в системах передачи информации.
Как и любая учебная книга настоящее пособие не может претендовать на исчерпывающую полноту изложения
затронутых в ней вопросов. Пытливый читатель, претендующий не только на высокую оценку по учебным дисциплинам, но и стремящийся стать хорошим специалистом в
данной области, должен быть готов к изучению и другой
литературы, приведенной в библиографическом списке.
Только рассматривая какое-либо явление с нескольких точек зрения, учитывая мнения разных специалистов, можно
по-настоящему глубоко в нем разобраться.
91
Библиографический список
1. Земельман, М. А. Метрологические основы технических
измерений / М. А. Земельман. – М. : Изд-во стандартов, 1991. –
228 с.
2. Шабалин, С. А. Измерения для всех / С. А. Шабалин. – М. :
Изд-во стандартов, 1992.– 560 с.
3. Метрология и электрорадиоизмерения в телекоммуникационных системах : учеб. для вузов / под ред. В. И. Нефедова. –
М. : Высш. шк., 2001. – 383 с.
4. Кушнир, Ф. В., Савенко, В. Г., Верник, С. М. Измерения в
технике связи / Ф. В. Кушнир, В. Г. Савенко, С. М. Верник. – М. :
Связь, 1976. – 432 с.
5. Дмитренко, И. Е., Дьяков, Д. В., Сапожников, В. В. Измерения и диагностирование в системах железнодорожной автоматики телемеханики и связи / И. Е. Дмитренко, Д. В. Дьяков,
В. В. Сапожников. – М. : Транспорт, 1994. – 263 с.
6. Метрология, стандартизация и измерения в технике связи /
под ред. Б. П. Хромого. – М. : Радио и связь, 1986. – 424 с.
7. Прянишников В. А. Электроника : курс лекций. – СПб. :
Корона принт, 1998. – 397 с.
8. Аналоговая и цифровая электроника / под ред. О. П. Глудкина. – М. : Горячая линия – Телеком, 2000. – 768 с.
9. Измерения в электронике: справочник / под ред.
В. А. Кузнецова – М. : Энергоатомиздат, 1987. – 512 с.
10. Назаров, С. П., Унучков, В. Е., Ложкин, И. В. Элементная база электро- и радиотехнических устройств : конспект лекций / С. П. Назаров, В. Е. Унучков, И. В. Ложник. – Иркутск :
ИВВАИУ, 1996. – Ч. I. – 206 с.
11. Digital storage scope for PC. Manual. – Gavere, Belgium. :
VELLEMAN KIT N. V., 1996. – 98 p.
12. Винокуров, В. И., Каплин, С. И., Петелин, И. Г. Электрорадиоизмерения / В. И. Винокуров, С. И. Каплин, И. Г. Петелин. –
М. : Высш. школа, 1986. – 351 с.
13. Мирский, Г. Я. Электронные измерения / Г. Я. Мирский.
– М. : Радио и связь, 1986. – 440 с.
14. Измерения в промышленности: справочник. Кн. 1. Тео92
ретические основы / под ред. П. Профоса. – М. : Металлургия,
1990. – 492 с.
15. Ратхор, Т. С. Цифровые измерения. Методы и схемотехника / Т. С. Ратхор. – М. : Техносфера, 2004. – 376 с.
16. Электрорадиоизмерения / под ред. А. С. Сигова. – М. :
Форум Инфра-М, 2004. – 384 с.
17. Харт, Х. Введение в измерительную технику / Х. Харт. –
М. : Мир, 1999. – 290 с.
93
Учебное издание
Унучков Владимир Евгеньевич
ИЗМЕРЕНИЯ В СИСТЕМАХ ПЕРЕДАЧИ
ИНФОРМАЦИИ
Учебное пособие
Редактор М. А. Айзиман
Верстка: И. В. Карташова-Никитина
Дизайн обложки М. Г. Яскин
Темплан 2006 г. Поз. 43.
Подписано в печать 6.05.06. Формат 60х84 1/16.
Печать трафаретная. Усл. печ. л. 6,0. Уч.-изд. л. 2,9.
Тираж 70 экз.
РЕДАКЦИОННО-ИЗДАТЕЛЬСКИЙ ОТДЕЛ
Иркутского государственного университета
664003, Иркутск, бульвар Гагарина, 36
94
95
96