Использование программы WInSet для визуализации
реклама

Федеральное агентство по образованию
Нижегородский государственный университет им. Н.И. Лобачевского
Национальный проект «Образование»
Инновационная образовательная программа ННГУ. Образовательно-научный центр
«Информационно-телекоммуникационные системы: физические основы и
математическое обеспечение»
Т.Н. Драгунов, А.Д. Морозов
Использование программы WInSet для визуализации
динамических систем
Учебно-методические материалы по программе повышения
квалификации «Информационные технологии и компьютерное
моделирование в математике и механике»
Нижний Новгород
2007
Учебно-методические материалы подготовлены в рамках
инновационной образовательной программы ННГУ: Образовательнонаучный центр «Информационно-телекоммуникационные
системы: физические основы и математическое обеспечение»
УДК 510:514:517.9:534:574
ББК В16
Драгунов Т.Н., Морозов А.Д. Использование программы WInSet для визуализации и
исследования динамических систем. Учебно-методический материал по программе повышения квалификации «Информационные технологии и компьютерное моделирование в математике и механике». Нижний Новгород, 2007, 89 с.
Рецензент: профессор факультета ВМК ННГУ Р.А. Мусарский
Книга посвящена описанию авторской программы WInSet и ее использованию для анализа большого набора задач из физики, механики, биологии, химии, экономики и др.
путем построения инвариантных множеств соответствующих динамических систем (фазовых кривых, резонансных структур, странных аттракторов, фракталов, паттернов и
др.). Программа WInSet свободно распространяется и может быть установлена на компьютер, работающий под управлением операционной системы Windows.
c
Т.Н.
Драгунов, А.Д. Морозов
Использование программы WInSet для визуализации
динамических систем
Т.Н. Драгунов, А.Д. Морозов
ОГЛАВЛЕНИЕ
1 Введение
1.1
1.2
1.3
5
Инвариантные структуры в окружающем нас мире . . . . . . . . . . . . .
5
1.1.1
Резонансные структуры в небесной механике . . . . . . . . . . . .
6
1.1.2
Сотовые, спиральные, вихревые и кристаллические структуры . .
8
1.1.3
Фракталы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
Динамические системы . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
1.2.1
Аттракторы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
1.2.2
Инвариантные торы . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
Дискретные динамические системы – отображения . . . . . . . . . . . . .
21
2 Описание работы с программой WInSet
23
2.1
Установка программы WInSet . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.2
Основы WInSet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.2.1
Начало работы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.2.2
Использование устройств ввода . . . . . . . . . . . . . . . . . . . .
25
2.2.3
Сценарий работы . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
2.2.4
Меню WInSet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.3
Приемы работы с графическими построениями для отображений и систем
обыкновенных дифференциальных уравнений (ОДУ) . . . . . . . . . . . .
33
2.4
Построения для диффузионных систем . . . . . . . . . . . . . . . . . . . .
40
2.5
Вы можете ввести свои уравнения . . . . . . . . . . . . . . . . . . . . . . .
43
3 Примеры построения инвариантных множеств динамических систем
49
3.1
3.2
Отображения . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
3.1.1
Отображение Чирикова . . . . . . . . . . . . . . . . . . . . . . . . .
49
3.1.2
Немонотонное кручение . . . . . . . . . . . . . . . . . . . . . . . . .
49
3.1.3
Отображение Заславского . . . . . . . . . . . . . . . . . . . . . . .
50
3.1.4
Отображения Хенона (Эно) . . . . . . . . . . . . . . . . . . . . . .
51
3.1.5
Отображения Мира-Гумовского . . . . . . . . . . . . . . . . . . . .
51
3.1.6
Отображение Катала . . . . . . . . . . . . . . . . . . . . . . . . . .
54
3.1.7
Отображение Жюлиа . . . . . . . . . . . . . . . . . . . . . . . . . .
54
3.1.8
Отображение Жюлиа 3D . . . . . . . . . . . . . . . . . . . . . . . .
56
3.1.9
Сохраняющее объем отображение . . . . . . . . . . . . . . . . . . .
56
Фракталы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
2
3
3.3
3.2.1
Использование цвета для построения фракталов . . . . . . . . . .
57
3.2.2
Фракталы Жюлиа . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
3.2.3
Фрактал Мандельброта . . . . . . . . . . . . . . . . . . . . . . . . .
60
3.2.4
Фрактал Ньютона . . . . . . . . . . . . . . . . . . . . . . . . . . . .
60
3.2.5
Фракталы Мира . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
3.2.6
Гиперфракталы . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
Системы обыкновенных дифференциальных уравнений . . . . . . . . . .
62
3.3.1
Системы типа Дюффинга
. . . . . . . . . . . . . . . . . . . . . . .
62
3.3.2
Системы, содержащие квадратичную нелинейность . . . . . . . . .
68
3.3.3
Маятниковые системы . . . . . . . . . . . . . . . . . . . . . . . . .
69
3.3.4
Гамильтонова система на торе . . . . . . . . . . . . . . . . . . . . .
73
3.3.5
Система типа Хенона-Хейлеса . . . . . . . . . . . . . . . . . . . . .
74
3.3.6
Модель системы Хенона-Хейлеса . . . . . . . . . . . . . . . . . . .
74
3.3.7
Система Вольтерра . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
3.3.8
Система Колмогорова-Вольтерра . . . . . . . . . . . . . . . . . . .
75
3.3.9
Брюсселятор . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
3.3.10 Система Кеплера
3.4
3.5
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
3.3.11 Движение частицы в поле тяготения . . . . . . . . . . . . . . . . .
78
3.3.12 Система Реслера . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
3.3.13 Система Лоренца . . . . . . . . . . . . . . . . . . . . . . . . . . . .
79
3.3.14 Система Чуа . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
Диффузионные уравнения . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
3.4.1
Брюсселятор в построянном потоке . . . . . . . . . . . . . . . . . .
80
3.4.2
Система Фитц Хью-Нагумо . . . . . . . . . . . . . . . . . . . . . . .
81
3.4.3
Модель Лингейла-Эпштейна (CIMA) . . . . . . . . . . . . . . . . .
81
3.4.4
Полудискретная модель нейронной решетки . . . . . . . . . . . . .
82
Используемые численные формулы . . . . . . . . . . . . . . . . . . . . . .
82
3.5.1
Метод Рунге-Кутта первого порядка. Формула Эйлера. . . . . . .
83
3.5.2
Метод Рунге-Кутта четвертого порядка. . . . . . . . . . . . . . . .
83
3.5.3
Метод Мерсона четвертого порядка. . . . . . . . . . . . . . . . . .
84
Литература
86
4
Предисловие
Для визуализации динамических систем (ДС) авторами была создана компьютерная программа WInSet. Под визуализацией ДС понимается построение инвариатных
множеств ДС. Наблюдаемые с помощью программы WInSet инвариантные структуры
охватывают широкий диапазон явлений в нелинейной динамике и, в тоже время, напоминают многие структуры в окружающей нас жизни (сотовые, спиральные, вихревые
структуры, автоволны, кристаллические структуры и др.). Говоря об этих структурах,
можно использовать термины: «компьютерное искусство», «художественный дизайн»,
«эстетический хаос». В последние годы особый интерес вызывают структуры, которые возникают не только в окружающем нас мире, но также и в чисто математических
исследованиях (резонансные структуры в нелинейной динамике, нетривиальные притягивающие множества – странные аттракторы, фракталы). Перечисленные структуры
обладают внешней привлекательностью и определенной красотой. Физики пытаются
понять внутренние механизмы образования той или иной структуры, появляются книги по динамической теории формообразования.
Книга ориентирована на широкий круг читателей и состоит из трех глав. В первой
главе излагается вводный материал, связанный с понятием динамической системы. Во
второй главе дается описание программы WInSet. Наконец, в третьей главе приводятся примеры основных отображений, фракталов и дифференциальных уравнений, для
которых программа строит инвариантные множества. Кроме этого программа позволяет вводить пользователю свои системы и строить для них инвариантные множества.
В ряде случаев этой информации бывает достаточно для получения представления о
свойствах рассматриваемых систем.
Программа работает в среде Windows и может быть использована как при анализе
динамических систем, так и в компьютерном дизайне (фракталы, генераторы узоров).
Данная книга является пособием по использованию новой версии программы WInSet. При подготовке этой книги использовалась предыдущая публикация авторов [23].
Работа частично поддержана грантами: РФФИ, № 06-01-00270 и НШ, № 9686.2006.1
ГЛАВА 1. ВВЕДЕНИЕ
1.1
Инвариантные структуры в окружающем нас мире
Что мы понимаем под инвариантными структурами, инвариантным множеством?
Согласно энциклопедическому словарю слово «инвариант» происходит от латинского
invarians (неизменяющийся) и означает величину, остающуюся неизменной при тех или
иных преобразованиях. Совокупность таких величин будем называть инвариантным
множеством. Математики дают более точные определения, использующие специальные понятия. Одно из таких определений мы дадим ниже, когда будем говорить о динамических системах. Примером инвариантного множества может служить множество
плоских геометрических фигур с постоянной площадью. В этом примере преобразование — это деформация фигур, оставляющая неизменной их площадь. Рассмотрим
другой пример — движение нашей планеты вокруг Солнца. Орбита этого движения
есть инвариантное множество. Действительно, если Земля в начальный момент времени находилась в какой-то точке орбиты, то и для всех последующих моментов времени
она будет находится на этой орбите. Здесь преобразование — это зависимость элементов
орбиты от времени.
Книга ориентирована на широкий круг читателей и не требует от них каких-то специальных знаний. Исключение составит математическое понятие динамической системы,
связанное с понятием дифференциальных уравнений. Читатель, не знакомый с дифференциальными уравнениями может ограничиться дискретными динамическими системами — отображениями. В этой книге основной упор делается на компьютерную
программу WInSet и результаты, которые можно получить с ее помощью. Программа позволяет не только наблюдать инвариантные множества заданных динамических
систем, но также позволяет пользователю ввести свою динамическую систему и исследовать ее, экспериментировать с фракталами. Она позволяет вам соприкоснуться с
удивительным миром гармонии и красок.
Короче говоря, основное в книге — это визуализация инвариантных множеств разнообразных нелинейных динамических систем. Наша цель показать читателю красоту
инвариантных множеств, их внутреннюю гармонию и изящество. Эстетика в науке и, в
частности, в математике является одним из стимулов ее развития.
Представленные в данном разделе структуры, возникающие в окружающей нас жизни, в разнообразных задачах и экспериментах похожи на некоторые инвариантные
структуры, которые можно увидеть в третьей главе для сугубо математических задач.
5
1.1 Инвариантные структуры
1.1.1
6
Резонансные структуры в небесной механике
Небесная механика является одной из самых интересных наук, ибо она связана с
анализом системы мироздания. Она породила основные разделы высшей математики:
дифференциальное и интегральное исчисление, теорию дифференциальных уравнений
и динамических систем. Именно, обыкновенными дифференциальными уравнениями
описываются движения небесных тел. В небесной механике, как правило, предполагается, что уравнения движения консервативные, т.е. сохраняют некоторую величину,
например, полную энергию системы. Это свойство есть не что иное, как свойство инвариантности. Подобные системы обычно представляют в специальной форме Гамильтона. В настоящее время в теоретической механике и математике существует раздел,
который называется гамильтоновой механикой, и в котором изучаются общие свойства
такого класса систем. Гамильтоновы системы дают удивительные по красоте резонансные структуры.
Несмотря на значительные успехи небесной механики остается нерешенным до сих
пор основной вопрос — вопрос об устойчивости Солнечной системы, об устойчивости ее
конфигурации на неограниченном промежутке времени. И поэтому неясно, будет ли,
например, планета Земля всегда двигаться по орбите, близкой к круговой, или ее орбита сильно изменится и она упадет на Солнце или уйдет из Солнечной системы (она
может также и разрушиться в результате столкновения с другим небесным телом). Тот
же вопрос возникает применительно к спутникам планет. Этим вопросом ученые занимаются уже более двухсот лет, и пока на него нет ответа. Итак, нет четкого ответа на
вопрос об эволюции Солнечной планетной системы, т.е. мы не знаем точно, сложилась
ли современная конфигурация в Солнечной системе за счет длительного эволюционного процесса или же она сразу стала такой с момента «рождения». Более привлекательна
эволюционная модель. И в этом нас убеждает анализ квазиконсервативных систем, и, в
первую очередь, резонансных структур в таких системах. Явления «захвата в резонанс»
и «синхронизации» могут объяснить «резонансную» структуру Солнечной системы.
Макрозадачи небесной механики близки по сути с микрозадачами о структуре атома.
Те и другие — это задачи о движении «частиц» в центральном поле. В первом случае
«частицы» — это планеты или спутники, во втором — электроны. Естественно, между
этими задачами есть и отличия. Так планеты, в отличие от электоронов, двигаются в
плоскости.
Резонансные структуры — это инвариантные структуры. Рассмотрим резонансные
соотношения в Солнечной системе. В настоящее время известны с достаточной точностью средние суточные движения планет ωj , j = 1, ..., 9 (измеряемые в градусах и долях
1.1 Инвариантные структуры
7
градусов: минутах и секундах). Поэтому можно проверить выполнимость резонансных
соотношений.
Говорят, что имеет место резонанс, если выполняется условие
n
X
kj ωj = 0,
j=1
где kj — целые числа, а n — число частот. Если мы рассматриваем все планеты, то
n = 9.
Условие резонанса — это условие соизмеримости частот. Число ||k|| =
Pn
j=1
|kj | на-
зывают порядком резонанса. Основным возмущающим телом в Солнечной системе является Юпитер, масса которого во много раз больше масс других планет. Поэтому
рассмотрим наинизшие двухчастотные резонансы и их порядок в проблеме трех тел
Солнце – Юпитер – планета. В этом случае наименьший порядок ||k|| = 3206 в системе
Солнце – Юпитер – Нептун очень велик [13]. Оказывается, чем больше порядок резонанса, тем меньше его проявление в движении небесных тел. Поэтому рассмотрим не
точные резонансы, а близкие к точным, т.е. вместо условия резонанса будем рассматривать следующее условие
k1 ω1 + k2 ωпл ≤ ε,
где ε — достаточно малая величина, ω1 — среднее суточное движение Юпитера, а
ωпл — среднее суточное движение планеты. Например, положим ε = 500 (секунд).
Тогда наименьший порядок резонанса равен 7 для системы Солнце – Юпитер – Сатурн (k1 = 2, kпл = 5) и наибольший — 649 для системы Солнце – Юпитер – Венера
(k1 = 617, kпл = 32) [13]. Для внутренних планет (по отношению к Юпитеру) можно
увеличить «щель» ε, что значительно уменьшит максимальный порядок резонанса.
Резонансные соотношения наблюдаются и в спутниковых системах, а также в системах планета – спутник. Так, еще Лаплас обратил внимание на удивительный трехчастотный резонанс в спутниковой системе Юпитера, образованный средними движениями Ио, Европы и Ганимеда: ν1 − 3ν2 + 2ν3 ≈ −0.0003◦ . Здесь ν1 , ν2 , ν3 — средние
движения Ио, Европы, Ганимеда соответственно. Система Земля – Луна резонансая с
k1 = k2 = 1.
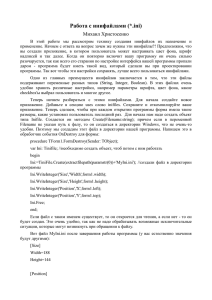
Уникальным образованием является спутниковая система и кольца Сатурна. На рис.
1.1 приведен фрагмент кольцевой системы Сатурна, полученный с помощью космического аппарата Вояджер-2 в конце августа 1981 года и взятый из журнала [38]. Структура колец Сатурна похожа на фрактальную структуру.
К удивительным образованиям Солнечной системы следует отнести пояс малых планет — астероидов, насчитывающий около 1800 объектов. Характер статистического рас-
1.1 Инвариантные структуры
8
Рис. 1.1. Фрагмент структуры колец Сатурна.
пределения астероидов по средним движениям (частотам) обладает сильно выраженной
неравномерностью, причем некоторые его максимумы и минимумы попадают на почти
резонансные значения средних движений системы астероид – Юпитер [13].
Визуализации инвариантных множеств гамильтоновых систем, возникающий в задачах небесной механики, посвящены, например, работы Симо [29].
1.1.2
Сотовые, спиральные, вихревые и кристаллические структуры
Обратимся к земным наукам. В жизни на Земле наблюдается огромное число разнообразных элегантных инвариантных структур, и мы кратко остановимся на некоторых
из них. Проблема формирования подобных упорядоченных структур интересует математиков, физиков, химиков, биологов. Отметим книгу Рабиновича и Езерского [27], в
которой идет речь о физической природе формообразования широкого класса структур.
Всем хорошо известна структура пчелиных сот — это правильные шестиугольники.
Структурное упорядочение проявляется в расположении цветков, зерен, листьев. Правильное спиральное расположение можно наблюдать у листьев побега растений, в подсолнухе. Стремление природы к спирали у ботаников называется филотаксисом. Ярким
примером спиральной структуры являются морские раковины. Предпринимались попытки сведения красоты пропорций к математической формуле. Следуя Вейлю [11],
опишем одну из таких попыток.
Наиболее общим движением твердого тела в трехмерном пространстве является винтовое движение S, представляющее собой соединение поворота вокруг некоторой оси с
переносом вдоль этой оси. Под действием соответствующего непрерывного и равномерного движения любая точка, не лежащая на оси этого движения, описывает винтовую
1.1 Инвариантные структуры
9
линию. Представим угол поворота при движении S как pq 3600 , где q, p — небольшие целые числа. Обнаружено, что дроби pq , соответствующие винтообразному расположению
листьев на стебельке растения, являются (довольно часто) числами Фибоначчи:
1 1 2 3 5 8 13 21
, , , , , , , , ...,
1 2 3 5 8 13 21 34
которые получаются при разложении в непрерывную дробь иррационального числа
√
( 5 − 1)/2. Это число является отношением, известным под названием «золотого сечения».
Примечательно, что приведенное выражение для угла поворота при спиральном движении подобно резонансной частоте в двухчастотной системе (например, в небесной механике), где числа p и q определяют порядок и тип резонанса. Это дает повод говорить
о «резонансах» в растительном мире.
Другой набор примеров из физики – это геометрия конвективных движений. Эти
движения приводят к конвективным ячейкам, которые могут принимать форму одномерных валов, создавать квадратную или гексагональную сетку (ячейки Бенара). В
качестве примера рассмотрим конвекцию в подогреваемом слое жидкости — конвекцию
Релея-Бенара.
Следуя Берже [9] рассмотрим горизонтальный слой жидкости (силиконовое масло),
ограниченный сверху и снизу жесткими теплопроводящими пластинами. Если число
Релея Ra (пропорциональное разности температур в вертикальном направлении) превышает некоторое критическое значение Ra∗ , то в жидкости устанавливается конвективное движение в виде вращающихся цилиндров, в котором отличны от нуля только
две компоненты скорости и нет движений вдоль оси цилиндров (рис. 1.2, 1.3(a)). При
дальнейшем увеличении числа Релея эта структура сохраняется до тех пор, пока Ra
не превысит некоторое значение Ra∗∗ . Появляется третья составляющая скорости и
новый вторичный набор цилиндров, оси которых перпендикулярны к главным цилиндрам (рис. 1.3(б)). Из рисунка 1.3(б) видна тесная аналогия с двумерным кристаллом.
Значения Ra∗ , Ra∗∗ называются бифуркационными значениями.
При дальнейшем увеличении числа Ra можно заметить возникновение локального
сжатия вблизи границы (пинч-эффект) при Ra = 20Ra∗ . Теперь перестаем увеличивать
Ra и будем следить за временными изменениями при фиксированном Ra ≈ 20Ra∗ (рис.
1.4). Вскоре после начала сжатия появляется изолированный дефект, вокруг которого
упорядоченная структура быстро разрушается. Это разрушение влечет за собой перестройку, при которой развивается многоугольная (ячеистая) конвективная структура
(рис. 1.4(d)). Через 15 часов присходит разрушение (плавление) всей структуры (рис.
1.1 Инвариантные структуры
10
Рис. 1.2. Схема конвективных движений жидкости в случае прямоугольной конфигурации.
Рис. 1.3. Двумерная (а) и трехмерная (б) структуры.
1.4(е)). Далее картина непрерывно меняется случайным образом и возникает турбулентность.
Если теперь вместо прямоугольного сосуда взять цилиндрический с диаметром D =
20d (d — высота цилиндра), то получим новые инвариантные структуры. Некоторые из
этих структур показаны на рис. 1.5.
В гидродинамике хорошо известны вихревые структуры, которые образуются при
обтекании жидкостью различных тел. Аналогичные структуры известны и в аэродинамике — это вихри, возникающие при обтекании тел потоком воздуха. Отметим также
циклогенез в атмосфере и океанах земли. Для иллюстрации вихревых структур обратимся к экспериментам.
Рассмотрим эксперимент, выполненный Гаком [10]. Приведем результаты этого эксперимента, следуя работе [14]. Он основан на использовании магнитогидродинамического
привода, позволяющего создать в тонком слое слабопроводящей жидкости (электролите) периодическое в пространстве электромагнитное поле. Первые эксперименты такого
рода были проведены в кювете размером 24х12 см с пространственным периодом в 4.4
см и глубиной заполнения 2-3 мм. Изменяя величину плотности тока между двумя
электродами, помещенными в исследуемый слой жидкости, можно создавать течения
с различными числами Рейнольдса (с различными скоростями движения жидкости).
1.1 Инвариантные структуры
Рис. 1.4. Стадии «плавления» трехмерной структуры при Ra ≈ 20Ra∗ .
Рис. 1.5. Конвективные структуры в цилиндрическом сосуде.
11
1.1 Инвариантные структуры
12
При некотором критическом значении числа Рейнольдса (Recr ) образуются «вторичные» течения. На рис. 1.6 приведена картина вторичных течений при Re/Recr = 1.1(а)
и Re/Recr = 1.25(б).
Рис. 1.6. Вихревые структуры при Re/Recr = 1.1(а) и Re/Recr = 1.25(б).
В эксперименте с круглой кюветой, проведенном по инициативе А.М. Обухова, также
наблюдались вторичные вихревые течения [12, 14] (рис. 1.7).
Картина вторичных течений, представленная на рис. 1.7(b), похожа на цепочку вихрей, наблюдаемых над Антарктидой. Представленные на рис. 1.6, 1.7 вихревые структуры напоминают резонансные структуры в системах с 3/2 степенями свободы (см. гл.
4).
Обратимся теперь к кристаллам. Наиболее известным примером кристаллов являются снежинки, имеющие шестиугольную форму. Вообще, в мире «классических» кристаллов невозможны никакие иные типы симметрии, кроме симметрии порядков 2,3,4
и 6 [11]. И можно задаться вопросом, почему снежинки не могут иметь другую форму, например пятиугольную. Действительно ли законы геометрии запрещают те или
иные формы физических объектов? Подобные вопросы берут свое начало в древнем мире. Современная кристаллофизика является областью, где применение геометрических
идей проявляется особенно наглядно. В ее основе лежит представление о периодиче-
Рис. 1.7. Вихревые структуры в круглой кювете.
1.1 Инвариантные структуры
13
ски повторяющихся структурах, заполняющих пространство или плоскость. Проблема
реализации возможных видов кристаллических решеток оказывается привязанной к
проблеме мозаик (покрытий) пространства (плоскости) с заданным типом симметрии,
и ей посвящены многочисленные исследования. В настоящее время понятие «упорядоченности», которое ранее связывалось с определенным типом симметрии, претерпевает
изменения, обусловленные прежде всего успехами в исследовании нелинейных динамических систем. Одна и та же система в зависимости от параметров может давать
различные инвариантные упорядоченные структуры. Эти структуры могут иметь не
только регулярный характер, но также быть нерегулярными. В частности, в связи с
этим Заславский и др. [15] ввели понятие симметрии типа «квазикристалл».
1.1.3
Фракталы
Следуя Мандельброту [35] и Ловерье [34] можно дать следующее упрощенное (и,
следовательно, «ограниченное») определение фрактала: фрактал — это геометрическая фигура, в которой похожий фрагмент повторяется при каждом уменьшении
масштаба. Таким образом, фрактал обладает масштабной инвариантностью. В [22] подобные фракталы называются конструктивными. Такие фракталы можно получить,
например, в результате простой рекурсивной процедуры – комбинации сжимающих
афинных преобразований плоскости. Наряду с конструктивными фракталами были обнаружены множества, похожие на фракталы. Как правило, подобные множества возникают в нелинейных динамических системах и, в первую очередь, в дискретных динамических системах (определение динамической системы см. в следующем пункте). Их
построение не так просто, как в случае конструктивных фракталов, и они могут обладать масштабной инвариантностью лишь приближенно. Подобные множества в [22]
называют динамическими фракталами. В связи с этим Мандельброт [35] понимает под
фракталом объект, который имеет «хаусдорфову» (или «фрактальную») размерность,
большую топологической размерности. Здесь слово «фрактальный» означает в переводе с английского «дробный», в то время как у Ловерье «фрактал» — это от латинского
«fractus», означающий «изломанный».
Чтобы прояснить неточные определения конструктивных и динамических фракталов, укажем основные свойства фрактального множества F, следуя[33] : 1) F имеет
тонкую структуру, то есть содержит произвольно малые масштабы; 2) F слишком нерегулярное, чтобы быть описанным на традиционном геометрическом языке; 3) F имеет
некоторую форму самоподобия, допуская приближенную или статистическую; 4) обычно «фрактальная размерность» множества F больше, чем его топологическая размерность; 5) в большинстве интересных случаев F определяется очень просто, например,
1.1 Инвариантные структуры
14
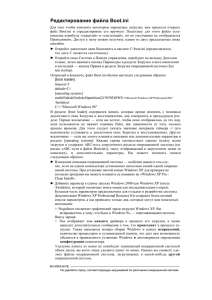
Рис. 1.8. Фрактал Мандельброта (граница черной области).
рекурсивно.
Раньше фракталы были лишь математическими редкостями, сейчас же им уделяется большое внимание благодаря, в первую очередь, книге Мандельброта [35]. Говоря
о фракталах, довольно часто используют термины: компьютерное искусство, художественный дизайн, эстетический хаос.
Примером фрактала может служить дерево, ствол которого разветвляется на две
ветви, которые, в свою очередь, разделяются на две более мелкие ветви и т.д. В уме
мы можем повторить эту процедуру бесконечное число раз и получить древовидный
фрактал с бесконечным числом ветвей. Каждую отдельную ветвь можно, в свою очередь, рассматривать как маленький ствол, который несет на себе целое дерево. Эта
конструкция имеет сходство с двоичной системой счисления. Другой пример фрактала
— это множество Кантора. Это не только самый старый фрактал, но он является также существенной частью многих современных фракталов, например, таких как кривая
Коха, Минковского [22]. Далее, в главе 3, мы дадим с помощью программы WInSet
представление динамических фракталов на экране компьютера. В качестве примера
на рис. 1.8 приведен один из таких фракталов, построенный впервые Мандельбротом
(фрактал Мандельброта - граница черной области).
Если вы установили программу WInSet c помощью инсталляционного диска, то вы
можете наблюдать этот (и другие фракталы) на экране дисплея, можете выделять
фрагменты фрактала, и действительно убедиться в том, что перед вами фрактал. Вы
также увидите, что фрактал — инвариантное множество относительно преобразования,
1.1 Инвариантные структуры
15
с помощью которого он строится. Фрактальная структура наглядно проявляется при
использовании цвета. При этом алгоритм управления цветом чрезвычайно прост (см.
гл.3, а также [39]).
Одним из первых описал фракталы французский математик Гастон Жюлиа в 1918
году в своем подробном мемуаре в несколько сотен страниц. Но в нем отсутствовали
какие-либо изображения, и оно игнорировалось почти полвека. Компьютеры сделали
видимым то, что не могло быть изображено во времена Жюлиа. Визуальные компьютерные результаты превзошли все ожидания.
Понятие «фрактал» уже доказало свою пользу во многих прикладных областях. В
частности, оно используется для расширения концепции подобия с помощью введения
малых возмущений в ряды преобразований подобия. Если мы вводим случайные возмущения в математически регулярный древовидный фрактал, то результат может быть
похожим на настоящее дерево, коралл или губку.
Поражает пример с медузой, которая обладает правильной геометрической симметрией и является подобием живой фрактальной структуры! Согласно [11] «...едва появившись, медуза начинает пульсировать, колокол начинает "звучать". Почки — миниатюрные копии родительского организма — появляются на щупальцах, на стебле,
а иногда на кромке колокола». Установлено, например, что небольшие медузы Obelia
отпочковываются и принимают завершенную форму с необычайной быстротой, что и
наводит на мысль о фрактальной структуре.
Современные исследования фракталов ассоциируются с именами Пуанкаре, Жюлиа
и Мандельброта и связаны с понятием «динамическая система». Под динамической системой можно понимать модель материи, движущейся в силовом поле. Здесь имеются
в виду не только планеты и кометы Солнечной системы, но также, например, и взаимодействие частиц в ускорителе. В самом общем виде под динамической системой можно
понимать любой процесс или преобразование. Например, процесс сосуществования различных биологических сообществ «описывается» динамической системой Вольтерра.
С математической точки зрения динамическая система — это система дифференциальных уравнений или дискретных уравнений. Гамильтоновы системы — это динамические
системы. Фракталы Жюлиа и Мандельброта определяются двумерной системой дискретных уравнений, эквивалентных одному комплексному уравнению. Остановимся на
понятии динамической системы более подробно.
1.2 Динамические системы
1.2
16
Динамические системы
Все временные (и не только временные) процессы могут быть описаны (формально
или неформально) некоторыми уравнениями. Во многих случаях эти уравнения являются дифференциальными. Совокупность таких уравнений, описывающих данный
процесс или явление, будем называть динамической системой. Для того, чтобы дать
более строгое определение динамической системы, необходимо знать основы дифференциального и интегрального исчисления и дифференциальных уравнений. Далее в этом
разделе мы считаем, что имеем дело с таким читателем.
Рассмотрим систему обыкновенных дифференциальных уравнений
dx1
dt
dx2
dt
= f1 (x1 , x2 , ..., xn )
= f2 (x1 , x2 , ..., xn )
......................................
dxn
dt
(1.1)
= fn (x1 , x2 , ..., xn ),
которую можно записать в более компактной векторной форме
dx
= F (x),
dt
x = (x1 , ..., xn );
F = (f1 , ..., fn ).
(1.2)
Систему (1.1) или (1.2) называют динамической системой. Число n называют порядком
или размерностью системы.
Понятие динамической системы может быть расширено и на системы, правые части
которых явно зависят от времени:
dx
= F (x, t),
dt
x = (x1 , ..., xn );
F = (f1 , ..., fn ).
(1.3)
Такие системы называются неавтономными (в отличие от систем вида (1.2), которые
называют автономными). Мы будем рассматривать системы, для которых функция
F (x, t) периодическая по t. Исследование таких систем может быть сведено к исследованию автономных систем, с размерностью на единицу большей. Поэтому, далее будем
говорить о системах вида (1.2).
В математике существует более абстрактное, а следовательно и более общее, определение динамической системы, когда под динамической системой понимается преобразование некоторого пространcтва в себя (см., например, [6]).
Пространство с координатами x1 , ..., xn называют фазовым пространством динамической системы (1.2). Точки фазового пространства называются фазовыми точками.
Допустим, что пространство с координатами x1 , ..., xn – это вещественное метрическое
1.2 Динамические системы
17
пространство Rn размерности n. Теперь мы можем дать более точное определение «инвариантного множества динамической системы».
Множество M пространства Rn будем называть инвариантным множеством системы (1.2), если для любой точки x0 ∈ M выполняется x(t) ∈ M, −∞ < t < +∞, где
x(t) – решение системы (1.2) с начальным условием x0 .
В теории дифференциальных уравнений такие инвариантные множества называют
иногда интегральными множествами [26].
Решение x(t, x0 , t0 ) системы (1.2), удовлетворяющее начальному условию x(t0 ) = x0 ,
определяет в фазовом пространстве фазовую кривую, проходящую через точку x0 .
Фазовая кривая — это, по определению, инвариантная кривая. Совокупность фазовых кривых, получаемая при изменении x0 в области допустимых значений из Rn ,
определяет фазовый портрет системы (1.2).
Фундаментальным понятием для динамических систем является понятие «аттрактор».
1.2.1
Аттракторы
Фазовая кривая системы (1.2) может состоять из одной точки. Такие фазовые кривые
называют состояниями равновесия. Для состояния равновесия должно выполняться
условие dx/dt = 0. Поэтому координаты состояний равновесия являются вещественными корнями системы
F (x) = 0.
(1.4)
Пусть система (1.4) имеет простой корень x = x0 (определитель матрицы Якоби
(DF/Dx)x=x0 6= 0). В этом случае состояние равновесия x0 называют простым.
Состояние равновесия является устойчивым (аттрактором), когда Reλk < 0, k =
1, 2, ...n, λk — корни характеристического уравнения
det(A − λE) = 0,
A = (DF/Dx)x=x0 , E– единичная матрица.
(1.5)
Устойчивое состояние равновесия — это пример простейшего аттрактора.
Наряду с состояниями равновесия система (1.2) может иметь изолированные замкнутые фазовые кривые, называемые предельными циклами. Поэтому аттрактором может
быть устойчивый предельный цикл.
Наиболее полно изучена структура фазового пространства двумерных динамических
систем (n = 2). Для таких систем состояния равновесия и предельные циклы — это
основные аттракторы. В системах с n > 2 могут существовать и другие аттракторы.
Например, в трехмерных динамических системах аттрактором может быть двумерный
тор.
1.2 Динамические системы
18
Мы привели примеры регулярных аттракторов. Оказывается, в динамических системах могут существовать и нерегулярные аттракторы — так называемые странные
аттракторы.
Термин «странный аттрактор» был введен Рюэллем и Такенсом [28] в связи с описанием механизма возникновения турбулентности и был инициализирован работой Лоренца по изучению ячеистой конвекции [18]. Лоренц был первым, кто для конкретной
трехмерной динамической системы с квадратичной нелинейностью с помощью численного счета указал на существование устойчивого детерминированного непериодического
решения — странного аттрактора (подробнее см. в п.6.4).
В настоящее время известно несколько «сценариев» перехода от регулярных аттракторов к нерегулярным при изменении параметров системы. Это сценарии Ландау и
Рюэлля-Такенса , сценарий Фейгенбаума (удвоение), сценарий Помо-Манневиля (перемежаемость). Есть и другие сценарии. Слово «сценарий» подразумевает (по Экману [32]) «набор наиболее вероятных возможностей».
Мы не ввели в системах (1.1)-(1.3) параметры, но неявно подразумевали их присутствие. Поэтому вместо системы (1.2) будем рассматривать систему
dx
= F (x, γ),
dt
x = (x1 , ..., xn );
F = (f1 , ..., fn ),
(1.6)
где γ — параметр или совокупность параметров.
”Переходы” в сценариях означают прохождение при изменении параметра γ через
критические значения, называемые бифуркационными значениями. А саму ситуацию,
которая возникает в системе (1.6) при бифуркационном значении параметра γ = γ∗ ,
называют бифуркацией. До сих пор мы не дали точного определения странного аттрактора. Чтобы исправить положение, приведем одно из возможных определений, следуя,
например, Афраймовичу [6]:
Аттрактор будем называть странным, если он отличен от конечного объединения
гладких многообразий.
Можно пойти дальше и дать другое определение «аттрактора».
Множество A называется аттрактором, если существует такая поглощающая
область в фазовом пространстве, максимальным аттрактором в которой оно является.
Максимальным аттрактором в поглощающей области V называется пересечение
всех сдвигов области V под действием фазового потока x(t).
Открытая область V ⊂ Rn называется поглощающей, если образ замыкания V
принадлежит V .
1.2 Динамические системы
19
Наряду с аттракторами в системах вида (1.6) могут существовать и другие (неустойчивые) состояния равновесия. Классификации состояний равновесия и их бифуркациям
посвящена обширная литература (см, например, [25], [1],[2], [5], [7]). Особую роль играют
состояния равновесия седлового типа. Это такие состояния равновесия системы (1.2),
для которых часть (пусть m) корней характеристического уравнения (1.5) имеют отрицательные действительные части, а часть (n − m) корней — положительные действительные части. У таких состояний равновесия существуют устойчивые и неустойчивые
инвариантные множества, размерность которых равна m и n − m соответственно. Эти
множества называются сепаратрисами, ибо они могут разделять фазовое пространство
на области с разным поведением фазовых кривых. В случае n = 2 имеем две сепаратрисы, которые асимптотически приближаются к седлу при t → ∞ и две сепаратрисы,
которые асимптотически удаляются от седла. Все остальные фазовые кривые проходят
мимо седла. Сепаратрисы разделяют фазовую плоскость на подобласти. В случае n = 3
имеются две одномерных сепаратрисы, и одна — двумерная. Очевидно, одномерные сепаратрисы не делят трехмерное пространство, а двумерная — делит.
Устойчивые и неустойчивые сепаратрисы седла могут пересекаться или совпадать
друг с другом. Тогда у динамической системы существуют двоякоасимптотические решения, т.е. решения, которые как при t → +∞ так и при t → −∞ стремятся к седлу.
Такие решения Пуанкаре назвал гомоклинными. Могут существовать также двоякоасимптотические решения, стремящиеся при t → +∞ и при t → −∞ к разным седлам.
Пуанкаре назвал их гетероклинными.
Нетривиальная ситуация возникает, когда n > 2 и устойчивые и неустойчивые сепаратрисы пересекаются трансверсально. Как известно (см, например, [30]), в этом случае
в некоторой окрестности двоякоасимптотической фазовой кривой существует счетное
множество седловых периодических решений и сложная структура поведения решений.
Под «сложной структурой» понимается существование «нетривиального гиперболического множества». Шильников [30] назвал эту структуру гомоклинической структурой
Пуанкаре. В частности, он показал [31], что если в исходной системе (1.6) при n > 2 существует «петля сепаратрисы седло-фокуса», то в некоторой окрестности петли может
существовать сложная структура. Для того, чтобы точно сказать, что такая структура
существует, необходимо проверить некоторые условия.
В последнее время все чаще используют термин «хаос» или «детерминированный хаос» вместо термина «сложная структура». Поэтому можно сказать, что этот результат
Шильникова является еше одним сценарием перехода к хаосу: чтобы найти параметры,
при которых в системе (1.6) существует хаос — ищи петлю сепаратрисы седло-фокуса.
1.2 Динамические системы
1.2.2
20
Инвариантные торы
Аттракторы существуют в неконсервативных системах. Если же мы обратимся к
консервативным системам, например, к гамильтоновым системам
dq
∂H(p, q)
=
q = (q1 , ..., qm ), p = (p1 , ..., pm )
dt
∂p
dp
∂H(p, q)
=−
,
dt
∂q
(1.7)
то увидим, что в них могут существовать состояния равновесия «нейтрального» типа.
Например, при m = 1 это состояния равновесия, для которых корни характеристического уравнения (1.5) чисто мнимые. Отличительной особенностью системы (1.7) является
наличие первого интеграла (интеграла «энергии»)
H(p, q) = h = const.
(1.8)
Функция H(p, q) называется гамильтонианом системы (1.7), а координаты q и p — обобщенными координатами и импульсами.
Как мы уже говорили, системы Гамильтона возникли в небесной механике. Наиболее
известные результаты в их исследовании после Пуанкаре - это результаты Колмогорова,
Арнольда, Мозера (теория КАМ) [16], [3], [4], [19], [20]. Суть их в следующем.
Рассмотрим интегрируемую гамильтонову систему. В новых переменных действие
I = (I1 , ..., Im ) и угол θ = (θ1 , ..., θm ) функция гамильтона принимает вид H = H0 (I).
Нетрудно видеть, что гамильтонова система с такой функцией Гамильтона немедленно
интегрируется. Фазовое пространство этой системы при весьма общих условиях расслаивается на m-мерные инвариантные торы T m = {(θ1 , ..., θm )mod(2π)} с условнопериодическим движением на них. Рассмотрим теперь возмущенную систему с функцией Гамильтона H(I, θ) = H0 (I) + εH1 (I, θ). Здесь ε — малый параметр. Согласно
КАМ-теории «большинство» инвариантных торов сохраняется при возмущении, лишь
немного деформируясь.
КАМ-теория решила бы проблему устойчивости Солнечной системы, если бы m = 2.
Действительно, в случае двух степеней свободы (m = 2) двумерные инвариантные торы
T 2 делят трехмерное множество уровня H(I, θ) = const и фазовая кривая, находящаяся
в начальный момент между какими-то двумя инвариантными торами, вечно остается
запертой между ними (переменные действия остаются близкими к своим начальным
значениям).
Поскольку при m > 2 ситуация иная, то эта теория не дала ответа на вопрос об устойчивости Солнечной системы на бесконечных временных промежутках. Здесь имеется и
другой аспект проблемы, связанный с малостью параметра ε [13].
1.3 Отображения
1.3
21
Дискретные динамические системы – отображения
Если в динамической системе независимая переменная (время) t изменяется дискретно, то приходим к дискретной динамической системе. Такие системы называют
обычно отображениями, а иногда каскадами.
По своему построению отображения разделяются на:
а) дискретные системы, получающиеся в результате аппроксимации дифференциальных уравнений разностными;
б) отображения Пуанкаре некоторой секущей в себя, построенные в результате интегрирования системы дифференциальных уравнений;
в) рекуррентные соотношения.
Исследованием отображений типа а) занимается специальный раздел математики,
называемый «численными методами». Нас же интересуют, прежде всего, отображения
Пуанкаре и рекуррентные соотношения. Те и другие формально можно записать в виде
Xj+1 = f (Xj ), j = 0, 1, 2, ....; X = (x1 , ..., xn ); f = (f1 , ..., fn ).
(1.9)
Отображение (1.9) для краткости будем обозначать буквой T . Остановимся на взаимно однозначных отображениях (гомеоморфизмах или диффеоморфизмах). К таким,
обычно, относятся отображения Пуанкаре, индуцированные гладкими системами дифференциальных уравнений. Задавая начальную точку X0 , мы получаем последовательность
...X−n , X−(n−1) , ..., X−1 , X0 , X1 , ..., Xn , Xn+1 , ...,
которую называют траекторией отображения T . Эту траекторию можно также представить в виде
...T −n X0 , T −(n−1) X0 , ..., T −1 X0 , X0 , T 1 X0 , ..., T n X0 , ..., .
У отображения T могут существовать неподвижные или периодические точки.
Отображения, для которых обратное отображение не существует или существует,
но неоднозначно, требуют специального рассмотрения. Такие отображения называются
необратимыми отображениями или эндоморфизмами, соответственно. Их исследованию
(при n = 2), основанному на компьютерном счете, посвящена книга Мира и др. [36].
Заметим, что иногда эндоморфизмы приводят к фракталам.
Точку M называют периодической периода p, если T p M = M и для всех n < p имеем
T n M 6= M . Если p = 1, то точку M называют неподвижной. В случае p > 1 имеем
цикл из p периодических точек.
1.3 Отображения
22
Также, как и для состояния равновесия, можно определить тип неподвижной (периодической) точки. Для этого необходимо линеаризовать отображение T (T p ) в окрестности неподвижной точки и найти собственные значения (мультипликаторы) матрицы
Якоби линеаризованной системы. Пусть X∗ – неподвижная точка отображения T , а
A = (Df /DX)X=X∗ – матрица Якоби, E – единичная матрица. Тогда мультипликаторы
находятся как корни характеристического уравнения
Det(A − µE) = 0.
(1.10)
Точка X∗ будет устойчивой, если |µj | < 1, j = 1, .., n. Если же среди корней характеристического уравнения (1.10) существует хотя бы один µk , для которого |µk | > 1,
то точка X∗ будет неустойчивой. Важную роль в исследовании отображения T играют седловые (гиперболические) периодические точки. К ним относятся такие точки,
для которых часть мультипликаторов по модулю больше единицы, а часть — меньше
единицы. Также, как и для состояний равновесия, можно определить сепаратрисы седловых неподвижных (периодических) точек. Наряду с регулярными аттракторами у
отображений могут существовать странные аттракторы.
Исследованию отображений вида (1.9) посвящено большое число работ. В основном
это работы, в которых n = 1 или n = 2.
ГЛАВА 2. ОПИСАНИЕ РАБОТЫ С ПРОГРАММОЙ WINSET
Программа WInSet предназначена для графического построения (визуализации) инвариантных множеств динамических систем: отображений и дифференциальных уравнений.
Тех, кто знаком с дифференциальными уравнениями и отображениями, несомненно заинтересует возможность легко и быстро получать для них на экране компьютера
фазовые траектории систем и последовательные итерации отображений. Вы сможете задавать произвольные параметры для целого ряда известных систем. Кроме того,
WInSet позволяет вводить Ваши собственные формулы для уравнений.
И, конечно, все читатели этой книги смогут оценить привлекательность фракталов —
этих удивительных по красоте объектов, при построении которых используются свойства двумерных отображений.
2.1
Установка программы WInSet
Запустите программу установки WInSet_Setup.exe и следуйте ее указаниям. От Вас
потребуется ввести путь к папке на диске, в которую будет установлена программа.
Дополнительная информация о последних изменениях в программе содержится в файле
ReadMe.txt. После завершения установки, для запуска программы используйте пункт
меню «Программы» | «WInSet3» в главном меню «Пуск».
Чтобы удалить программу WInSet с компьютера, воспользуйтесь Панелью управления Windows и удалите программу с помощью функции «Установка и удаление программ».
2.2
2.2.1
Основы WInSet
Начало работы
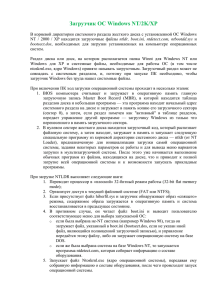
Главное окно программы имеет вид, показанный на рис. 2.1. Оно состоит из
нескольких компонентов: главное меню, панель инструментов, рабочая область,
панель координат, строка состояния.
Под заголовком окна располагается строка главного меню. Его пункты подробно
описаны в разделе 2.2.4. Основное пространство окна занято рабочей областью, внутри которой выполняются построения. Когда указатель мыши находится внутри рабочей
области, нажатием правой кнопки мыши вызывается контекстное меню. Его пункты
частично повторяют пункты главного меню программы.
Панель инструментов — это ряд кнопок с пиктограммами, дублирующих часто
23
2.2 Основы WInSet
24
Рис. 2.1. Главное окно программы WInSet
используемые пункты меню. Если на некоторое время задержать указатель мыши над
одной из кнопок, то рядом с ним появится всплывающая подсказка, поясняющая назначение кнопки. Для того, чтобы скрыть панель инструментов, нужно снять отметку
с пункта меню «Вид» | «Панель инструментов» (View | Toolbar).
Панель координат точки находится справа от рабочей области. В нижней части панели отображаются значения координат точки на плоскости, соответствующей
текущему положению указателя мыши. В верхней части панели отображаются координаты последней вычисленной точки (либо начальной точки, заданной по умолчанию).
Эти значения используются в качестве начальных условий для построения, если оно
запущено без указания начальной точки. Во время выполнения вычислений на панели
координат отображается полоска индикатора, показывающая степень завершения процесса. Для того, чтобы скрыть панель координат точки, нужно снять отметку с пункта
меню «Вид» | «Координаты точки» (View | Point Coordinates).
Над нижней кромкой окна расположена строка состояния, в которой отображается
информация о работе программы. Когда программа выполняет какую-либо длительную
операцию, в левой части строки состояния появляется текст пояснения.
На рисунке 2.1 показано окно программы с русскими названиями пунктов меню и
текстом сообщений. Если в текущих настройках Windows установлен русский язык,
программа при запуске устанавливает русский вариант интерфейса пользователя. Ес-
2.2 Основы WInSet
25
ли текущий язык Windows какой-либо другой, то программа переключается на английские варианты меню и сообщений. Чтобы переключить язык WInSet, используйте меню
«Установки» | «Язык» (Options | Language).
2.2.2
Использование устройств ввода
При работе с программой, для того, чтобы указать начальную точку для вычислений, удобно пользоваться мышью. Над рабочей областью окна WInSet указатель мыши
принимает форму перекрестия. Щелчок левой кнопкой мыши в рабочей области задает
начальную точку и начинает процесс построения. Кроме того, с помощью мыши можно
выделить часть изображения и растянуть фрагмент до размеров рабочей области. Для
этого нажмите левую кнопку мыши и, удерживая ее нажатой, переместите указатель
мыши вправо и вниз так, чтобы появился прямоугольник, обрамляющий интересующую Вас область. После того, как Вы отпустите кнопку мыши, выделенный фрагмент
будет перерисован в увеличенном масштабе. Он займет все пространство рабочей области. Такое выделение можно повторить много раз. Для того, чтобы отменить последнее
изменение масштаба, нажмите клавиши Ctrl+BackSpace
Все действия, выполняемые с помощью мыши, можно выполнить с помощью клавиатуры. Доступ к пунктам главного меню осуществляется с помощью комбинации
клавиш Alt+<подчеркнутая буква пункта меню>. Переход между элементами диалоговых окон происходит с помощью клавиши табуляции Tab (Shift+Tab – в обратном
направлении). В диалоговых окнах встречаются поля ввода, содержащие выпадающий
список для выбора значений. В таком поле для перемещения по списку используйте
клавиши со стрелками вверх и вниз.
Часто используемые пункты меню можно вызывать с помошью функциональных
клавиш, а также сочетаний управляющих клавиш. Их обозначения отображаются справа от названий пунктов меню.
2.2.3
Сценарий работы
Продемонстрируем типичный сценарий работы с программой.
Непосредственно после запуска программы рабочая область пуста, а некоторые пункты меню неактивны. Для начала работы необходимо выбрать объект исследования —
динамическую систему. Выберите пункт главного меню «Система» | «Выбор систем...»
(System | Select...). Перед Вами откроется диалоговое окно выбора системы, показанное
на на рис. 2.2. В списке категорий выберите Fractal, а из списка систем этой категории выберите строчку Newton. Нажмите кнопку «OK». После этого текущая система
2.2 Основы WInSet
26
выбрана: в заголовке окна программы появляется название системы, а в рабочей области отображаются оси координат.
Рис. 2.2. Окно выбора системы
После выбора системы автоматически вызывается диалоговое окно «Параметры системы» (System Parameters), показанное на рис. 2.3. В нем отображается запись уравнений системы, и предоставляется возможность ввести значения изменяемых параметров.
Оставьте их без изменения и нажмите «ОК».
Рис. 2.3. Окно редактирования параметров системы
Для того, чтобы запустить построение фрактала Ньютона, выберите пункт главного меню «Запуск» (Draw) или нажмите на клавиатуре клавишу Enter. Начнется процесс построения, указатель мыши примет форму песочных часов, а в строке состояния
2.2 Основы WInSet
27
появится надпись «Вычисление...» (Drawing...). Когда построение закончится, у Вас
должно получиться изображение фрактала, подобное рис. 3.19.
Что же можно сделать с полученным построением? Измените значение параметра
системы и сравните построения при различных значениях параметра. Выберите пункт
меню «Правка» | «Параметры системы» (Edit | System Parameters) или нажмите правую кнопку мыши и в контекстном меню выберите пункт с таким же названием. Вы
снова увидите окно «Параметры системы» (рис. 2.3). Введите новое значение параметра, например, p1 = 7 и нажмите «OK». После этого запустите построение фрактала.
Для того, чтобы увеличить фрагмент построения, воспользуйтесь мышью и выделите прямоугольную область рисунка. После того, как Вы отпустите кнопку мыши,
изображение будет перерисовано в новом масштабе.
Для систем из других категорий сценарий работы с программой WInSet несколько
сложнее. Для начала построения необходимо, как правило, задать начальные условия. Запуск вычислений приводит к выполнению лишь одного этапа построения, длительность которого определяется установками вычислений. Например, для того, чтобы
построить на экране отрезок траектории двумерного отображения, необходимо задать
начальную точку и число итераций отображения (длину отрезка траектории). После того, как один этап построения выполнен, программа ожидает запуска следующего этапа
построения или изменения установок.
Рис. 2.4. Диалоговое окно открытия файла слайда
Все последовательно выполненные этапы построения можно сохранить в виде файла, чтобы потом воспроизвести построение в пакетном режиме. Пакетный режим
построения реализован с помощью слайдов. Слайды WInSet — это текстовые файлы
(рис. 2.4, 2.5), в которых содержатся данные, необходимые для выполнения построения:
2.2 Основы WInSet
28
• название системы,
• значения параметров уравнений,
• характеристики окна построения: свойства осей координат, цвет фона, осей и построения,
• упорядоченный набор данных для выполнения этапов построения. Каждый элемент этого набора содержит начальные условия и установки вычислений (различные для каждого типа построения).
Загрузка слайда — это повторение программой ранее выполненных шагов построения.
После загрузки слайда можно продолжить построение, отменить его часть, изменить
характеристики окна построения и т.д. Вместе с программой Вы получили целый набор
файлов слайдов.
Рис. 2.5. Окно «Сохранить слайд»
Далее мы рассмотрим приемы работы с различными категориями систем более подробно (п. 2.3, 2.4).
2.2.4
Меню WInSet
Файл (File)
Открыть слайд...
(Open Slide...)
открыть файл слайда и выполнить сохраненное в этом
файле построение. Вызывается стандартное диалоговое
окно открытия файла (рис. 2.4).
Сохранить слайд...
(Save as Slide...)
сохранить текущее построение в файле слайда WInSet.
Вызывается стандартное диалоговое окно сохранения
файла (рис. 2.5).
2.2 Основы WInSet
29
Рис. 2.6. Окно «Сохранить в графическом формате»
Сохранить в графиче- сохранить содержимое рабочей области в файле графиском формате...
ческого формата. Вызывается диалог сохранения фай-
(Save Picture...)
ла, позволяющий просматривать растровые графические файлы (рис. 2.6).
Загрузить палитру...
(Load Palette...)
открыть файл с описанием цветов палитры и установить текущую палитру для построения фракталов в соответствии с данными из файла. Вызывается стандартное диалоговое окно открытия файла.
Рис. 2.7. Диалоговое окно вывода на печать
2.2 Основы WInSet
Печать...
(Print...)
30
вызов стандартного диалога печати на принтере
(рис. 2.7). Изображение печатается в натуральную величину. Если это невозможно (не позволяют размеры
бумаги при текущих установках принтера), то изображение масштабируется так, чтобы оно поместилось на
листе выбранного формата.
Выход
выход из программы.
(Exit)
Правка (Edit)
Отмена построения
(Undo Draw)
Начальная точка...
отмена последнего запуска построения, т.е. возврат на
один этап назад.
вызов диалога ввода начальной точки.
(Initial Point...)
Рис. 2.8. Окно выбора цвета
Параметры системы...
(System Parameters...)
вызов диалогового окна просмотра записи системы и
ввода значений параметров, если такие имеются.
Цвет
этот пункт показывает подменю для изменения цветов
(Color)
построения: текущего цвета, цвета фона и цвета осей координат (рис. 2.8). Цвет фона и цвет осей изменяются
немедленно, а цвет построения применяется к последующим запускам.
2.2 Основы WInSet
31
Перерисовать
обновить содержимое области построения.
(Refresh)
Перерисовать оси
перерисовать оси координат поверх имеющегося постро-
(Refresh Axes)
ения.
Очистить
очистить рабочую область и отменить все выполненные
(Clear)
ранее шаги построения.
Вид (View)
Панель инструментов
показывать панель инструментов под строкой меню.
(Toolbar)
Координаты точки
показывать панель координат текущей точки.
(Point Coordinates)
Оси рамкой
переключить режим отображения осей координат: либо
(Boxed Axes)
прямоугольник, ограничивающий область построения,
либо пересечение прямых, соответствующее положению
осей координат.
Окно 3-мерного просмот-
отобразить дополнительное окно просмотра 3-мерного
ра
построения, в котором построение можно вращать с по-
(3D Window)
мощью клавиш со стрелками, а также устанавливать
дополнительные режимы вывода на экран: туман, перспектива, сглаживание линий.
Система (System)
Выбор систем...
вызов диалогового окна выбора системы.
(Select...)
Добавить новую...
(New
User-Defined
вызов диалога ввода новой пользовательской системы
Sys- (см. п. 2.5).
tem...)
Свойства систем пользо- вызов диалогового окна «Свойства систем пользоватевателя...
ля».
(User System Properties...)
Запуск (Draw)
запуск построения (из текущей точки).
2.2 Основы WInSet
32
Установки (Options)
Счет...
(Computation...)
Построение...
(Plot...)
вызов диалогового окна для редактирования установок,
используемых при вычислениях.
вызов диалогового окна для изменения типа построения
и граничных значений по осям координат.
Различные типы построений могут содержать дополнительные режимы вычислений.
В этом случае в меню Установки появляются дополнительные пункты, отвечающие за
включение и выключение этих режимов.
Язык
(Language)
выбор языка для меню и текстовых сообщений.
Некоторые сообщения будут всегда выдаваться поанглийски, например сообщения компилятора выражений, вызываемого при вводе систем пользователя
(см. п. 2.5).
? (Help)
Содержание
вызов файла справки.
(Contents)
О программе...
(About...)
вызов диалогового окна со сведениями о версии программы WInSet.
Некоторым часто используемым пунктам меню соответствуют комбинации клавиш.
2.3 Построения для отображений и систем ОДУ
33
Список функциональных клавиш WInSet
Открыть файл слайда
<Ctrl+O>
Сохранить построение в файле слайда WInSet
<Ctrl+L>
Сохранить построение в графическом формате
<Ctrl+S>
Загрузить графическую палитру из файла
<Ctrl+T>
Распечатать построение
<Ctrl+P>
Отменить последний запуск построения
<Alt+BkSp>
Отменить последнее изменение масштаба
<Ctrl+BkSp>
Отобразить окно 3-мерного просмотра построения
<Ctrl+G>
Задать начальные условия
<F4>
Редактировать параметры системы
<F7>
Изменить текущий цвет построения
<F6>
Перерисовать изображение
<F5>
Перерисовать оси координат
<Shift+F5>
Очистить построение
<F8>
Выбрать систему
<F3>
Добавить новую систему
<Shift+F3>
Запустить вычисление
<Enter>
Прервать построение
<Esc>
Редактировать установки построения
<F9>
Редактировать установки вычислений
<F11>
2.3
Приемы работы с графическими построениями для отображений и систем обыкновенных дифференциальных уравнений (ОДУ)
Для того, чтобы установить тип построения для текущей системы, нужно вызвать
окно редактирования установок построения (рис. 2.9). Выпадающий список «Тип построения» содержит все доступные типы построений для текущей системы. Если выбрано построение на плоскости, то для редактирования доступны свойства двух осей
координат.
С помощью выпадающих списков для каждой из осей координат назначается переменная системы. Граничные значения по осям задаются с помощью полей ввода максимального и минмального значений. Расстановка отметок по каждой из осей координат
управляется комбинированным выпадающим списком «Отметки». Возможны следующие варианты: Auto — автоматическая расстановка, None — не делать отметок по осям,
2.3 Построения для отображений и систем ОДУ
34
числовое значение — установить интервал между соседними отметками.
Рис. 2.9. Окно редактирования установок построения
Для построений, допускающих визуализацию в трехмерном пространстве, активен
переключатель режима трехмерной графики (рис. 2.10). Когда этот переключатель
включен, появляются поля ввода для редактирования свойств третьей оси координат.
Рис. 2.10. Окно «Установки построения» для трехмерных графиков
Оси координат могут представлять собой пересечение прямых или рамку, ограничивающую область построения. Вид расположения осей координат в окне задается с
помощью пункта меню «Вид» | «Оси рамкой» (View | Boxed Axes). Цвет фона рабочей
области, цвет осей координат и цвет основных элементов построения (цвет «переднего
плана») задаются с помощью меню «Правка» | «Цвет» (Edit | Color).
В режиме просмотра 3-мерного построения нажмите сочетание клавиш Ctrl+G. При
этом появится отдельное окно «3D» (Рис. 2.11), в котором построение можно вращать
с помощью клавиш со стрелками, а также включать или выключать дополнительные
режимы просмотра: туман, перспектива, сглаживание линий. Прежде, чем изменять
режим просмотра построения в главном окне, закройте окно «3D».
Для всех систем ОДУ определен тип построения Traject — фазовые траектории и
2.3 Построения для отображений и систем ОДУ
35
Рис. 2.11. Окно для вращения трехмерных построений
графики решений. Для некоторых типов систем ОДУ возможно построение отображения Пуанкаре. Для этих систем определен тип построения Map. Для итеративных
отображений — только Map.
Для начала вычислений, как правило, требуется задать начальную точку. Если установлен режим построения на плоскости, начальную точку можно задать с помощью мыши, нажав левую кнопку. При этом координаты точки, соответствующей положению
указателя мыши, будут зафиксированы как начальная точка, и выполнится один этап
построения. Следует обратить внимание на то, что при выборе начальной точки с помощью мыши не изменятся переменные, которые не отображаются по осям координат. Например, в режиме построения проекций фазовых траекторий для трехмерной системы
с помощью мыши можно задать только две координаты, соответствующие переменным,
назначенным по оси абсцисс и оси ординат. Для того, чтобы задать начальные значения
всех переменных системы, следует использовать диалоговое окно «Начальная точка»
(рис. 2.12). Оно позволяет задать начальную точку при помощи ввода с клавиатуры.
Рис. 2.12. Окно редактирования начальной точки
2.3 Построения для отображений и систем ОДУ
36
Если построение представляет собой трехмерный график, то задать начальную точку
можно только с помощью этого диалогового окна. Обратите внимание, что указатель
мыши в этом случае будет принимать форму стрелки над рабочей областью главного
окна WInSet. Это означает, что нетт возможности задать начальную точку щелчком
мыши в рабочей области. Кроме этого, Вы не можете использовать мышь для выделения фрагментов изображения и увеличения масштаба. Для этого Вам необходимо
задать новые максимальные и минимальные значения по осям координат в диалоговом
окне «Установки построения».
Для запуска построения из текущей точки можно использовать клавишу Enter или
пункт меню «Запуск» (Draw). Это приводет к выполнению одного этапа построения.
После окончания вычислений в качестве начальной точки фиксируется последняя вычисленная точка. Если после завершения одного этапа построения снова нажать пункт
меню «Запуск» или клавишу Enter, не меняя начальную точку, то второй этап построения будет продолжением первого. Это важно, например, при построении сепаратрис
или траекторий отображений.
Настройка параметров вычислений, определяющих продолжительность выполнения
одного этапа, метод вычисления, максимальную допустимую погрешность и др., производится с помощью окна «Установки счета» (рис. 2.13).
Рис. 2.13. Окно редактирования установок вычисления
Для каждого типа построения и каждого класса систем имеется свой набор установок
вычисления.
1. Многомерные отображения
(a) Дискретные траектории (Map)
2.3 Построения для отображений и систем ОДУ
37
• Число точек — число итераций отображения, выполняемых за один запуск.
2. Отображения с ветвлением (типа обратного отображения Жюлиа)
(a) Дискретные траектории (Map)
• Число шагов — число итераций отображения, выполняемых за один запуск. На каждом шаге отображения вычисляется несколько точек, и их
количество с каждым шагом увеличивается экспоненциально.
3. Двумерные отображения
(a) Дискретные траектории (Map)
• Число точек — число итераций отображения, выполняемых за один запуск.
(b) Неустойчивые сепаратрисы неподвижных и периодических точек (Map, Построение сепаратрис)
• Число элементов разбиения отрезка — разбиение начального отрезка.
• Число итераций отрезка — число итераций начального отрезка, выполняемых за один запуск.
• Номер субгармоники — для построения сепаратрис неподвижной точки
следует задать 1, для периодической точки — период точки.
(c) Области притяжения аттракторов (Map, Построение областей притяжения)
• Число шагов — число итераций отображения, которое выполняется для
проверки попадания траектории в круг, содержащий аттрактор отображения.
• Радиус круга — радиус круга, в который входят все траектории, притягивающиеся к аттрактору.
4. Фракталы: неконсервативные двумерные отображения
(a) Дискретные траектории отображения (Map)
• Число точек — число итераций отображения, выполняемых за один запуск.
(b) Цветовое выделение убегания траектории на бесконечность (Fractal )
2.3 Построения для отображений и систем ОДУ
38
• Число шагов — число итераций отображения, которое выполняется для
проверки выхода траектории из круга, соответствующего уходу на бесконечность.
• Радиус круга — радиус круга, соответствующего уходу на бесконечность.
5. Системы обыкновенных дифференциальных уравнений
(a) Фазовые траектории или проекции решения (Traject)
• Метод интегрирования — метод численного решения задачи Коши.
• Макс. погрешность — величина, оценивающая максимальную погрешность метода. Если на каком-либо шаге метода оценка погрешности превышает эту величину, выдается сообщение об ошибке точности метода.
• Отрезок времени — длина отрезка времени, на котором численно решается задача Коши.
• Начальный шаг — шаг интегрирования, параметр метода численного решения задачи Коши. Методы с коррекцией шага могут изменять величину шага интегрирования в процессе вычислений. Метод, не изменяющий
шаг при выполнении вычислений, может, тем не менее, уменьшить величину последнего шага, чтобы достичь заданной длины отрезка времени.
6. Системы с 3/2 степенями свободы
(a) Фазовые траектории или проекции решения (Traject)
• Метод интегрирования и Макс. погрешность.
• Отрезок времени и Начальный шаг.
(b) Дискретные траектории отображения Пуанкаре (Map)
• Метод интегрирования, Макс. погрешность, Начальный шаг.
• Число точек, аналогично случаю двумерных отображений.
(c) Неустойчивые сепаратрисы неподвижных и периодических точек отображения Пуанкаре (Map, Построение сепаратрис)
• Метод интегрирования, Макс. погрешность, Начальный шаг.
• Число элементов разбиения отрезка, Число итераций отрезка и Номер
субгармоники, аналогично случаю двумерных отображений.
(d) Области притяжения аттракторов отображения Пуанкаре (Map, Построение
областей притяжения)
2.3 Построения для отображений и систем ОДУ
39
• Метод интегрирования, Макс. погрешность, Начальный шаг.
• Число шагов отображения и Радиус круга, аналогично случаю двумерных отображений.
7. Для систем с двумя и тремя степенями свободы, для которых возможно построение двумерных отображений Пуанкаре, задаются также значения интегралов,
используемых при построении отображения Пуанкаре.
Каждый этап построения может использовать свои собственные установки счета, а
также текущий цвет.
Для того, чтобы отменить последний выполненный этап построения, нужно использовать пункт меню «Правка» | «Отмена построения» (Edit | Undo Draw) или нажать
комбинацию клавиш <Alt>+<BackSpace>. Построение будет перерисовано без последнего этапа.
Кроме случая отмены предыдущего запуска, активное построение перерисовывается
в следующих ситуациях:
• При изменении размеров окна программы, например, при развертывании на весь
экран.
• При переназначении переменных системы по осям координат с помощью окна
«Установки построения» (рис. 2.10).
• При изменении граничных значений по осям координат.
Для того, чтобы сохранить построение в файле слайда WInSet, нужно выбрать пункт
меню «Файл» | «Сохранить слайд...» (File | Save as Slide...) и в появившемся окне сохранения файла ввести имя файла слайда. Файлы слайдов WInSet имею тип .ini. Чтобы
сохранить образ рабочей области в файле графического формата, нужно выбрать пункт
меню «Файл» | «Сохранить в графическом формате...» (File | Save Picture...). Появится окно сохранения графического файла (рис. 2.6), в котором требуется выбрать тип
файла: растровый формат BMP или векторный формат EPS, и ввести имя файла.
Иногда необходимо выполнить несколько последовательных увеличений фрагментов построения и сохранить получившийся ряд изображений в графических файлах.
При этом, на каждом изображении обычно требуется выделить в виде прямоугольника
область, которая будет увеличена на следующем изображении. Если при увеличении
фрагмента с помощью мыши удерживать нажатой клавишу <Shift>, то непосредственно перед перерисовкой изображения в новом масштабе будет выведено окно сохранения построения в графическом файле. Это дает возможность указать имя и тип
2.4 Построения для диффузионных систем
40
Рис. 2.14. Сохранение изображения с отмеченной областью выделения.
файла, в котором будет сохранен образ рабочей области с отмеченным для увеличения
фрагментом (рис. 2.14).
2.4
Построения для диффузионных систем
В категорию PDE (Diffusion) включены системы в частных производных с постоянными коэффициентами, моделирующие процессы реакции-диффузии, в том числе
системы на плоскости и системы на прямой.
При решении начально-краевой задачи для таких систем исходная система в частных производных на плоскости аппроксимируется на однородной сетке ωij , i, j = 1 . . . N .
Решение системы из m уравнений сводится к решению системы из m(N −2)2 обыкновенных дифференциальных уравнений. Программа WInSet реализует следующие режимы
построения для диффузионных систем:
• Пространственное распределение (Spatial Plot). Для систем на прямой можно построить его для нескольких моментов времени, получив пространственновременную диаграмму.
• График по времени (Time Plot) — график решения в одном или нескольких узлах
сетки.
2.4 Построения для диффузионных систем
41
• Цветовой рельеф (Color Plane) — для систем на плоскости значения переменной
системы отображаются с помощью цветовых оттенков.
Для выполнения этих построений требуются дополнительные настройки, поэтому для
диффузионных систем диалоговые окна WInSet имеют существенные отличия.
Рис. 2.15. Окно ввода начальных условий, страница «Один узел».
Вместо диалогового окна «Начальная точка» (рис. 2.12) появляется окно «Начальные условия» (рис. 2.15, 2.16), состоящее из нескольких страниц. На первой странице «Один узел» можно ввести значения переменных системы в одном узле сетки.
Остальные страницы используются для того, чтобы полностью задать распределение
по каждой из компонент системы. С помощью этих страниц задается постоянное или
квазислучайное распределение в заданном интервале значений.
Рис. 2.16. Окно ввода начальных условий, страница выбора распределения.
2.4 Построения для диффузионных систем
42
Окно «Установки счета» содержит переключатель «Периодические граничные условия» (рис. 2.17). Если он отмечен, краевые условия считаются периодическими, т.е.
u0j = uN j , ui0 = uiN . В противном случае краевые условия считаются постоянными и
равными начальному распределению на границе. Список «Параметры счета» содержит
строки для дополнительных параметров:
• Размер пространственной области — ширина W квадратной области, в которой
ищется решение.
• Число узлов сетки — число N узлов сетки ωij по каждой пространственной переменной. При этом шаг сетки h по пространственным переменным равен
h=
W
.
N −1
• В режиме построения пространственного распределения или цветового рельефа
изображение в графическом окне может обновляться довольно медленно из-за
большого объема вычислений, а также вследствие того, что много вычислительных ресурсов тратится на его перерисовку. С помощью параметра Прорисовывать
каждый M шаг по времени можно увеличить количество шагов интегрирования,
выполняемых без обновления картинки. Это позволит сделать процесс построения
более динамичным.
Рис. 2.17. Окно установок вычисления.
Окно «Установки построения» (рис. 2.18, 2.18) для диффузионных моделей состоит
из двух страниц. Страница «Общее» предназначена для выбора режима построения,
2.5 Ввод пользовательских систем
43
назначения переменных по осям координат и установки отметок по осям. Кроме того,
при построении графика решения (Time Plot) необходимо указать узел сетки, для которого выполняется построение. Это можно сделать, указав его номер в поле для фиксированных индексов. Если для системы на плоскости необходимо построить график
пространственного распределения вдоль одной из координат, поле для фиксированного
индекса используется для выбора сечения.
Рис. 2.18. Окно установок построения, страница выбора режима и осей координат.
В режиме построения цветового рельефа третья ось координат перпендикулярна
плоскости рисунка, а значения в узлах сетки отображаются с помощью цветовой шкалы.
Для того, чтобы задать такую шкалу оттенков, необходимо выбрать цвета для минимального и максимального значений, а также количество оттенков для промежуточных
значений (не более 256).
На странице «История» (рис. 2.20) расположены поля для выбора тех узлов сетки, для которых в памяти компьютера сохраняется полная история построения, т.е.
значения, вычисленные на всех шагах интегрирования. Для этих узлов можно будет
просмотреть график решения для всего интервала по времени. Такая настройка необходима для того, чтобы ограничить объем данных, сохраняемых в оперативной памяти
компьютера. Если в момент запуска построения объем доступной оперативной памяти будет недостаточным для выполнения всех шагов по времени, программа выдаст
предупреждение.
2.5
Вы можете ввести свои уравнения
Программа WInSet позволяет не только изучать встроенные примеры систем дифференциальных уравнений и отображений, но и вводить свои собственные. Выбрав в меню
2.5 Ввод пользовательских систем
44
Рис. 2.19. Окно установок построения, установка шкалы оттенков для цветового рельефа.
Рис. 2.20. Окно установок построения, страница выбора узлов сетки, для которых доступно построение графика решения.
«Система» (System) пункт «Добавить новую...» (New User-Defined System...), Вы увидите диалоговое окно «Ввод новой системы» (рис. 2.21). Оно состоит из двух страниц:
«Общее» и «Текст».
В поле «Название» на первой странице введите имя для новой системы. Это имя не
должно совпадать ни с одним именем встроенной или пользовательской системы. Далее,
из выпадающего списка «Тип системы» выберите тип системы. Тип системы определяет
доступные типы построений, ограничения на размерность системы и другие настройки.
Программа позволяет работать со следующими типами пользовательских систем:
• Map (Отображение),
2.5 Ввод пользовательских систем
45
Рис. 2.21. Окно ввода пользовательской системы, первая страница.
• Map on cylinder(2pi) (Отображение цилиндра),
• Map on torus(2pi) (Отображение тора),
• Diff.eq. (Система дифференциальных уравнений),
• Diff.eq. with 3/2 deg. of freedom (Система дифференциальных уравнений с
3/2 степенями свободы).
• Diff.eq. with 3/2 deg. on cyl.(2pi) (Система дифференциальных уравнений
с 3/2 степенями свободы на цилиндре).
• Diff.eq. with 3/2 deg. on torus(2pi) (Система дифференциальных уравнений с 3/2 степенями свободы на торе).
• Diffusion 1D (Диффузионная система на прямой).
• Diffusion 2D (Диффузионная система на плоскости).
После этого в поле «Размерность» задайте размерность системы, если это поле не заполнится автоматически. В поле «Построение по умолчанию» задается тип построения,
которое будет выбрано для системы по умолчанию. В поле «Категория» введите название для категории, в которую должна входить новая система. Можно выбрать одну из
уже существующих категорий. После заполнения всех полей первой страницы необходимо перейти к странице «Текст».
2.5 Ввод пользовательских систем
46
Рис. 2.22. Окно ввода пользовательской системы, страница ввода уравнений.
Поля ввода на этой странице предназначены для ввода уравнений системы. Левые части уравнений считаются фиксированными — они определяются типом системы. Необходимо ввести лишь выражения для правых частей. При вводе выражений используйте
следующие обозначения:
• Переменные системы:
для систем ОДУ и отображений: x1, x2, ...
для диффузионных систем: U1, U2, ...
время: t
• Изменяемые параметры: p1, p2, ...
• Арифметические операции: "+", "−", "∗", "/",
«^» — возведение в степень
• Дифференциальные операторы в диффузионных системах:
∂U1
1
, dy(U1) для ∂U
,
∂x
∂y
2
2
∂ U1
для ∂x2 , d2y(U1) для ∂∂yU21 ,
dx(U1) для
d2x(U1)
delta(U1) для ∆U1 .
• Константы:
pi – число π,
e – основание натурального логарифма.
Перечислим допустимые имена элементарных функций.
Тригонометрические функции:
2.5 Ввод пользовательских систем
sin
- синус,
cos
- косинус,
tan
- тангенс,
asin
- арксинус,
acos
- арккосинус,
atan
- арктангенс.
47
Гиперболическая тригонометрия:
sinh
- синус,
cosh
- косинус,
tanh
- тангенс,
asinh
- арксинус,
acosh
- арккосинус,
atanh
- арктангенс.
Другие функции:
abs
- модуль числа,
int
- целая часть числа,
sqrt
- корень квадратный,
exp
- экспонента,
log
- натуральный логарифм,
log10 - десятичный логарифм,
В записи правых частей строчные и прописные буквы не различаются. Для установки
порядка действий используйте скобки «()». В записи системы должно быть не более
двадцати изменяемых параметров с номерами от 1 до 20.
После ввода правых частей системы нажмите кнопку «Компилировать текст» для
выявления ошибок записи выражений. Если Вы выбрали для ввода систему с 3/2 степенями свободы, то WInSet потребует от Вас ввести сведения о частоте возмущения —
параметра, необходимого при построении отображения Пуанкаре. Если Вы использовали параметры при задании правых частей, то в поле «Частота определяется» можете
выбрать способ, каким определяется частота возмущения: одним из параметров системы или числовым значением. В поле «Частота равна» выберите параметр или введите
числовое значение частоты. Нажмите на кнопку «OK», чтобы подтвердить ввод системы и закрыть окно. После этого Вы сможете найти свою систему в диалоговом окне
«Выбор системы» в списке систем той категории, которая была указана при создании
системы.
2.5 Ввод пользовательских систем
48
Посмотреть и изменить свойства систем пользователя можно с помощью диалогового окна «Выбор пользовательской системы» (рис. 2.23), которое вызывается с помощью
пункта меню «Система» | «Свойства систем пользователя» (System | User System Properties). В частности, Вы можете удалить любую пользовательскую систему из списка
систем любой категории, выбрав ее и нажав кнопку «Удалить». Выбрав систему и нажав
кнопку «OK», вы вызываете на экране диалоговое окно, подобное окну на рис. 2.21, 2.22,
в котором можно отредактировать свойства и текст системы.
Рис. 2.23. Окно выбора пользовательской системы для редактирования или удаления.
Замечание. Работая с программой WInSet, Вы можете запустить несколько экземпляров программы одновременно. Если Вы добавляете или удаляете системы в одном
из экземпляров программы, эти изменения не будут видны в других запущенных экземплярах. Рекомендуется проводить добавление и редактирование пользовательских
систем только в одном из запущенных экземпляров программы.
ГЛАВА 3. ПРИМЕРЫ ПОСТРОЕНИЯ ИНВАРИАНТНЫХ
МНОЖЕСТВ ДИНАМИЧЕСКИХ СИСТЕМ
Здесь приведен набор задач, в которых построены инвариантные множества. Более
подробно об этих задачах см., например, в [23, 24].
3.1
Отображения
3.1.1
Отображение Чирикова
Имя в WInSet: Chirikov
Формула:
(
xn+1 = xn + yn+1
(3.1)
yn+1 = yn + p1 sin xn
Параметры: p1 = 0.7 (по умолчанию)
Слайды: Chirikov.ini
4
3
2
1
y
0
-1
-2
-3
-4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.1. Отображение Чирикова (3.1) при p1 = 0.7 (слайд Chirikov.ini)
3.1.2
Немонотонное кручение
Имя в WInSet: NonMonoton
Формула:
(
2
xn+1 = xn + p1 yn+1
+ p3 yn+1
yn+1 = yn + p1 p2 sin xn
Параметры: p1 = 0.4, p2 = 1, p3 = 0 (по умолчанию)
Слайды: Nonmonot1.ini, Nonmonot2.ini, Nonmonot3.ini, Nonmonot4.ini
49
(3.2)
3.1 Отображения
50
3.2
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-3.2
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.2. Отображение цилиндра (3.2) с немонотонным числом вращения при p1 = 0.4,
p2 = 1, p3 = 0 (слайд Nonmonot1.ini)
3.1.3
Отображение Заславского
Имя в WInSet: Zaslavsky
Формула:
(
xn+1 = (xn + p1 sin(yn )) cos(2π/p2 ) + yn sin(2π/p2 )
yn+1 = −(xn + p1 sin(yn )) sin(2π/p2 ) + yn cos(2π/p2 )
(3.3)
Параметры: p1 = 0.8, p2 = 3 (по умолчанию)
Слайды: Zasl_4.ini, Zasl_5.ini, Zasl_6.ini, Zasl_7.ini, Zasl_8.ini, Zasl9_1.ini
40
30
20
10
y
0
-10
-20
-30
-40
-40
-30
-20
-10
0
10
20
30
40
x
Рис. 3.3. Отображение Заславского (3.3) при p1 = 1, p2 = 4 (слайд Zasl_4.ini).
3.1 Отображения
3.1.4
51
Отображения Хенона (Эно)
Отображение Хенона с тригонометрической нелинейностью
Имя в WInSet: Henon1
Формула:
(
xn+1 = −(yn − x2n ) sin(2π/p1 ) + xn cos(2π/p1 )
yn+1 = (yn − x2n ) cos(2π/p1 ) + xn sin(2π/p1 )
(3.4)
Параметры: p1 = 5.6 (по умолчанию).
Слайды: Henon1_1.ini, Henon1_2.ini
0.8
0.6
0.4
0.2
y
0.0
-0.2
-0.4
-0.6
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
x
Рис. 3.4. Отображение Хенона (3.4) при p1 = 5.6 (слайд Henon1_1.ini)
Квадратичное отображение Хенона
Имя в WInSet: Henon2
Формула:
(
xn+1 = yn + 1 + p1 x2n ,
yn+1 = p2 xn .
(3.5)
Параметры: p1 = 1, p2 = 1 (по умолчанию).
Слайды: Henon2.ini.
3.1.5
Отображения Мира-Гумовского
Отображение Мира_1
Имя в WInSet: Mira1
Формула:
(
xn+1 = (1 − p1 )xn + yn
yn+1 = p1 p2 xn + p3 yn − p1 x3n
(3.6)
3.1 Отображения
52
0.4
0.2
y
0.0
-0.2
-0.4
-1.2
-0.8
-0.4
0.0
0.4
0.8
1.2
x
Рис. 3.5. Отображение Хенона (3.5) при p1 = −1.4, p2 = 0.3 (слайд Henon2.ini)
Параметры: p1 = 2.68, p2 = −0.1, p3 = 0.9 (по умолчанию)
Слайды: Mira1_1.ini, Mira1_2.ini
0.8
0.4
y
0.0
-0.4
-0.8
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
x
Рис. 3.6. Отображение Мира_1 (3.6) при p1 = 2.68, p2 = −0.1, p3 = 1.15 (слайд
Mira1_2.ini)
Отображение Мира_2
Имя в WInSet: Mira2
Формула:
(
xn+1 = p1 xn + yn
yn+1 = p2 + x2n
Параметры: p1 = 1, p2 = −0.5952 (по умолчанию)
(3.7)
3.1 Отображения
53
Слайды: Mira2_1.ini, Mira2_2.ini
1.2
0.8
0.4
y
0.0
-0.4
-1.2
-0.8
-0.4
0.0
0.4
0.8
x
Рис. 3.7. Отображение Мира_2 (3.7) при p1 = 0.99, p2 = −0.5952 (слайд Mira2_2.ini).
Отображение Мира_3
Имя в WInSet: Mira3
Формула:
(
xn+1 = x2n − yn2 + p1 xn + p2
(3.8)
yn+1 = 2xn yn − 25 p1 yn
Параметры: p1 = −0.95126, p2 = −0.8788 (по умолчанию)
Слайды: Mira3.ini
1.2
0.8
0.4
y
0.0
-0.4
-0.8
-1.2
-1.2
-0.8
-0.4
0.0
0.4
0.8
1.2
x
Рис. 3.8. Аттракторы отображения Мира_3 (3.8) при p1 = −0.95126, p2 = −0.8788
(слайд Mira3.ini).
3.1 Отображения
54
Отображение Мира-Гумовского
Имя в WInSet: Mira & Gumowski
Формула:
xn+1 = p2 yn − F (xn )
yn+1 = −xn + F (xn+1 )
2x2
F (x) = p1 x + (1 − p1 ) 1+x
2
(3.9)
Параметры: p1 = −0.5, p2 = 1 (по умолчанию)
Слайды: Mira&Gum1.ini, Mira&Gum2.ini, Mira&Gum3.ini, Mira&Gum4.ini
6
4
2
0
y
-2
-4
-6
-8
-6
-4
-2
0
2
4
6
8
x
Рис. 3.9. Аттрактор отображения Мира-Гумовского (3.9) при p1 = −0.45, p2 = 0.94
(слайд Mir&Gum4.ini).
3.1.6
Отображение Катала
Имя в WInSet: Cathala
Формула:
(
xn+1 = p1 xn + yn
yn+1 = p2 + x2n
(3.10)
Параметры: p1 = 0.7, p2 = −0.82 (по умолчанию)
Слайды: Cathala.ini
3.1.7
Отображение Жюлиа
Имя в WInSet: Julia inverse
Формула:
xn+1
q
√
xn −p1 + (xn −p1 )2 +(yn −p2 )2
= ±
2
yn+1 =
yn −p2
2xn+1
Параметры: p1 = 0, p2 = 1 (по умолчанию)
Слайды: Julia_inv.ini
(3.11)
3.1 Отображения
55
1.2
0.8
0.4
y
0.0
-0.4
-0.8
-1.2
-0.8
-0.4
0.0
0.4
0.8
x
Рис. 3.10. Аттрактор отображения Катала (3.10) при p1 = 0.7, p2 = −0.82 (слайд
Cathala.ini)
1.0
0.5
y
0.0
-0.5
-1.0
-1.0
-0.5
0.0
0.5
1.0
x
Рис. 3.11. Дендрит — аттрактор обратного отображения Жюлиа (3.11) при p1 = 0,
p2 = 1 (слайд Julia_inv.ini).
3.1 Отображения
3.1.8
56
Отображение Жюлиа 3D
Имя в WInSet: Julia 3D inverse
Формула:
q
√
xn −p1 + (xn −p1 )2 +(yn −p2 )2 +(rn −p3 )2
xn+1 = ±
2
yn+1 =
rn+1 =
yn −p2
2xn+1
rn −p3
2xn+1
(3.12)
Параметры: p1 = −0.2, p2 = −0.8, p3 = 0.2 (по умолчанию)
Слайды: Julia3D.ini
r
0.8
0.4
0.8
-1.2
-0.8
-0.4
0
-0.8
-0.4
0.4
y
0.8
1.2
x
-0.8
Рис. 3.12. Аттрактор обратного отображения Жюлиа 3D (3.12) при p1 = −0.2, p2 = −0.8,
p3 = 0.2 (слайд Julia3D-5.ini).
3.1.9
Сохраняющее объем отображение
Имя в WInSet: Meiss-Gomez
Формула:
xn+1 = −yn + 2xn zn
yn+1 = zn
rn+1 = −xn − 2yn zn + 4xn zn2
Параметры: отсутствуют
Слайды: Meiss1.ini
(3.13)
3.2 Фракталы
57
Z
0.8
0.4
0.8
Y
-0.8
-0.4
0
0.4
0.8
X
-0.8
-0.4
-0.8
Рис. 3.13. Траектории отображения (3.13) (слайд Meiss1.ini).
3.2
3.2.1
Фракталы
Использование цвета для построения фракталов
Оценить красоту и привлекательность фракталов помогает использование цвета.
Картины описанных ниже фракталов многоцветны. При построении каждого из них
используется условие приближения траектории точки к аттрактору — бесконечно удаленному, как для фрактала Жюлиа, или конечному, как для фрактала Ньютона. Так
как для приближения к аттрактору траектории может потребоваться бесконечное количество итераций, программа WInSet использует некоторое предельное значение числа
итераций (параметр «число шагов»), после которого предполагается, что условие притяжения к аттрактору не выполнено. Цвет каждой точки на экране определяется числом итераций, которое потребовалось траектории отображения, чтобы приблизиться
к аттрактору. Программа WInSet использует для изображения фракталов 256 цветов,
определяя номер цвета в данном наборе по формуле n mod 256, где n — число совершенных итераций. Этот алгоритм используется также для определения границы бассейнов
притяжения аттракторов. Эти границы могут быть как фрактальными множествами,
так и регулярными (например, гладкими кривыми).
3.2.2
Фракталы Жюлиа
Стандартный фрактал Жюлиа
Имя в WInSet: Julia
3.2 Фракталы
58
Формула:
(
xn+1 = x2n − yn2 + p1
yn+1 = 2xn yn + p2
(3.14)
Параметры: p1 = −0.22, p2 = −0.74 (по умолчанию)
Рис. 3.14. Стандартный фрактал Жюлиа (3.14).
Фрактал Жюлиа_2
Имя в WInSet: Julia2
Формула:
(
xn+1 =
yn+1 =
1
(xn + x3n − 3xn yn2 )
2
1
(y − yn3 + 3x2n yn )
2 n
Рис. 3.15. Фрактал Жюлиа_2 (3.15).
(3.15)
3.2 Фракталы
59
Фрактал Жюлиа_3
Имя в WInSet: Julia3
Формула:
zn+1 =
2 +1)2
(zn
2 −1)
4zn (zn
(3.16)
Рис. 3.16. Фрактал Жюлиа_3 (3.16).
Фрактал Жюлиа_4
Имя в WInSet: Julia4
Формула:
(
xn+1 = (5xn − 2x3n + 6xn yn2 )/3
yn+1 = (5yn + 2yn3 − 6x2n yn )/3
Рис. 3.17. Фрактал Жюлиа_4 (3.17).
(3.17)
3.2 Фракталы
3.2.3
60
Фрактал Мандельброта
Имя в WInSet: Mandelbrot
Формула:
(
xn+1 = x2n − yn2 + p1
yn+1 = 2xn yn + p2
(3.18)
Рис. 3.18. Фрактал Мандельброта (3.15).
3.2.4
Фрактал Ньютона
Имя в WInSet: Newton
Формула:
zn+1
(p1 − 1)znp1 + 1
=
p1 znp1 −1
Параметры: p1 = 3 (по умолчанию)
Рис. 3.19. Фрактал Ньютона (3.19) при p1 = 3.
(3.19)
3.2 Фракталы
3.2.5
61
Фракталы Мира
Фрактал Мира_1
Имя в WInSet: Mira1 fractal
Формула:
(
xn+1 = (1 − p1 )xn + yn
yn+1 = p1 p2 xn + p3 yn − p1 x3n
(3.20)
Параметры: p1 = 3.1, p2 = −0.3, p3 = 1.2 (по умолчанию)
Рис. 3.20. Фрактал Мира_1 (3.20).
Фрактал Мира_4
Имя в WInSet: Mira4 fractal
Формула:
(
xn+1 = x2n − yn2 + p1 xn + p2
yn+1 = 2xn yn − 25 p1 yn + p3
Параметры: p1 = 1, p2 = −0.22, p3 = −0.74 (по умолчанию)
Рис. 3.21. Фрактал Мира_4 (3.21).
(3.21)
3.3 Системы ОДУ
3.2.6
62
Гиперфракталы
Имя в WInSet: Julia 3D
Формула:
2
2
+a
− rm
xm+1 = x2m − ym
(3.22)
ym+1 = 2xm ym + b
rm+1 = 2xm rm + c,
m = 0, 1, 2, . . .
Параметры: a = 0.1, b = 0.5, c = 0.2 (по умолчанию)
Слайды: Julia3D.ini.
Рис. 3.22. Гиперфрактал отображения (3.22) при a = 0.1, b = 0.5, c = 0.2.
3.3
3.3.1
Системы обыкновенных дифференциальных уравнений
Системы типа Дюффинга
Уравнение c кубической нелинейностью
Имя в WInSet: Duffing
Система:
(
dx
dt
dy
dt
=y
= −p1 x − p2 x3 + p3 sin (p4 t)
(3.23)
Параметры: p1 = 1, p2 = −1, p3 = 0.1, p4 = 1 (по умолчанию)
Слайды: Duff_ph.ini, Duff_ph2.ini, Duff_ph3.ini, Duff_ph4.ini, Duff_res.ini
3.3 Системы ОДУ
63
y
1.0
0.5
-1.5
-1.0
-0.5
0.5
1.0
1.5
x
-0.5
-1.0
Рис. 3.23. Фазовая плоскость системы (3.23) при p1 = −1, p2 = 1, p3 = 0, p4 = 4 (слайд
Duff_ph.ini).
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-1.6
-0.8
0.0
0.8
1.6
x
Рис. 3.24. Структура резонансов системы (3.23) при p1 = −1, p2 = 1, p3 = 0.3, p4 = 4
(слайд Duff_res.ini).
3.3 Системы ОДУ
64
Уравнение с нелинейностью пятой степени
Имя в WInSet: Duffing Type
Система:
(
dx
dt
dy
dt
=y
= −p1 x − p2 x3 − p3 x5 + p4 sin(p5 t)
(3.24)
Параметры: p1 = 1, p2 = −3, p3 = 1, p4 = 0, p5 = 1 (по умолчанию).
Слайды:
Duff5_ph.ini,
Duff5_ph2.ini,
Duff5_ph3.ini,
Duff5_ph4.ini,
Duff5_res.ini
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-1.6
-0.8
0.0
0.8
1.6
x
Рис. 3.25. Фазовая плоскость системы (3.24) при p1 = 1, p2 = −3, p3 = 1, p4 = 0, p5 = 1
(слайд Duff5_ph.ini).
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-1.6
-0.8
0.0
0.8
1.6
x
Рис. 3.26. Структура резонансов системы (3.24) при p1 = 1, p2 = −3, p3 = 1, p4 = 0.3,
p5 = 1 (слайд Duff5_res.ini).
3.3 Системы ОДУ
65
Уравнение Дюффинга-Ван дер Поля
Имя в WInSet: DuffingVanDerPole
Система:
(
dx
dt
dy
dt
=y
= −p1 x − p2 x3 + (p3 + p4 x2 )y + p5 sin(p6 t)
(3.25)
Параметры: p1 = 1, p2 = 1, p3 = −0.1, p4 = 0.1, p5 = 0.1, p6 = 1 (по умолчанию)
Слайды:
Duf_VP_attr.ini,
Duf_VP_1.ini,
Duf_VP_2.ini,
Duf_VP_3.ini,
Duf_VP_4.ini, Duf_VP_5.ini, Duf_VP_sep1.ini, Duf_VP_sep2.ini, Duf_VP_sep3.ini,
Duf_VP_sep4.ini,
Duf_VP_sep5.ini,
Duf_VP_sep6.ini,
Duf_VP_sep7.ini,
Duf_VP_sep8.ini, Duf_VP_sep9.ini
0.8
0.4
0.0
y
-0.4
-0.8
-1.2
-0.8
-0.4
0.0
0.4
0.8
1.2
x
Рис. 3.27. Квазиаттрактор системы (3.25) при p1 = −1, p2 = 1, p3 = −0.8, p4 = 1,
p5 = 0.3, p6 = 4 (слайд Duf_VP_attr.ini).
Уравнение с полигармонической правой частью
Имя в WInSet: DuffingPolyHarm
Система:
(
dx
dt
dy
dt
=y
= −p1 x − p2 x3 + (p3 sin(p5 t) + p4 sin(p6 t))
(3.26)
Параметры: p1 = −1, p2 = 1, p3 = 0.06, p4 = 0.2, p5 = 1, p6 = 3 (по умолчанию)
Слайды: Duff_poly.ini, Deg3.ini
3.3 Системы ОДУ
66
1.6
0.8
y 0.0
-0.8
-1.6
-1.6
-0.8
0.0
0.8
1.6
x
Рис. 3.28. Структура резонансов системы (3.26) при p1 = −1, p2 = 1, p3 = 0.06, p4 = 0.2,
p5 = 1, p6 = 3 (слайд Duff_poly.ini).
8
6
4
2
y
0
-2
-4
-6
-8
-3.2
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
3.2
x
Рис. 3.29. Вырожденный резонанс (петельки) в резонансной зоне основного резонанса
(3.26) при p1 = 1, p2 = 1, p3 = 5, p4 = 19, p5 = 2.701, p6 = 8.103 (слайд Deg3.ini).
3.3 Системы ОДУ
67
Уравнение параметрического типа
Имя в WInSet: DuffingParam
Система:
(
dx
dt
dy
dt
=y
= −x − x3 + (p1 + p2 x2 + p3 x sin(p5 t))y + p4 sin(p5 t))
(3.27)
Параметры: p1 = 0.0472, p2 = −0.008, p3 = 0.0487, p4 = 2, p5 = 4 (по умолчанию)
Слайды: Duf_par1.ini, Duf_par2.ini, Duf_par3.ini, Duf_par4.ini, Duf_par5.ini
16
8
y
0
-8
-16
-4
-2
0
2
4
x
Рис. 3.30. Инвариантные кривые отображения Пуанкаре для системы (3.27) при p1 =
0.0472, p2 = −0.008, p3 = 0.0487, p4 = 2, p5 = 4 (слайд Duf_par1.ini).
Модель Гудвина
Имя в WInSet: Goodwin
Система:
(
dx
dt
dy
dt
=y
2
3
= p1 x(1 − x2 ) + p2 xx2−p
y + p4 sin(p5 t)
+1
(3.28)
Параметры: p1 = 0.5, p2 = 1, p3 = 0.6, p4 = 0, p5 = 4 (по умолчанию)
Слайды: Goodwin1.ini, Goodwin2.ini.
0.8
0.6
0.4
0.2
y
0.0
-0.2
-0.4
-0.6
-0.8
-1.2
-0.8
-0.4
0.0
0.4
0.8
1.2
x
Рис. 3.31. Инвариантные кривые отображения Пуанкаре для системы (3.28) при p1 =
0.5, p2 = 1, p3 = 0.652, p4 = 0.13, p5 = 1 (слайд Goodwin2.ini).
3.3 Системы ОДУ
3.3.2
68
Системы, содержащие квадратичную нелинейность
Имя в WInSet: Quadratical
Система:
(
dx
dt
dy
dt
=y
= −p1 x − p2 x2 + (p3 + p4 x2 )y + p5 sin(p6 t)
(3.29)
Параметры: p1 = 1, p2 = −1, p3 = 0, p4 = 0, p5 = −0.1, p6 = 2 (по умолчанию)
Слайды: Quad_ph.ini, Quad_res.ini
0.6
0.3
y
0.0
-0.3
-0.6
-0.4
0.0
0.4
0.8
1.2
1.6
x
Рис. 3.32. Фазовая плоскость системы (3.29) при p1 = −1, p2 = 1, p3 = 0, p4 = 0, p5 = 0,
p6 = 2 (слайд Quad_ph.ini).
0.6
0.4
0.2
y
0.0
-0.2
-0.4
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
x
Рис. 3.33. Структура резонансов системы (3.29) при p1 = 1, p2 = −1, p3 = 0, p4 = 0,
p5 = −0.05, p6 = 2 (слайд Quad_res.ini).
Уравнение Релея
Имя в WInSet: Rayleigh
Система:
(
dx
dt
dy
dt
=y
= x − p1 x2 + p2 (1 − y 2 /3)y + p3 x sin(p4 t)
(3.30)
3.3 Системы ОДУ
69
Параметры: p1 = 0.2, p2 = 0.1, p3 = 0, p4 = 3 (по умолчанию)
Слайды: Rayleigh1.ini, Rayleigh2.ini, Rayleigh3.ini
0.8
0.0
-0.8
y
-1.6
-2.4
-3.2
0.0
0.8
1.6
2.4
3.2
4.0
4.8
5.6
x
Рис. 3.34. Отображение Пуанкаре для системы (3.30) при p1 = 0.25, p2 = 0.2, p3 = 0.8,
p4 = 3 (слайд Rayleigh3.ini).
3.3.3
Маятниковые системы
Обыкновенный маятник
Имя в WInSet: Pendulum
Система:
(
dx
dt
dy
dt
= y
= − sin(x) + p1 sin(p2 t)
(3.31)
Параметры: p1 = 0.5, p2 = 1 (по умолчанию)
Слайды: Pend_ph.ini, Pend_res.ini
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.35. Фазовая плоскость системы (3.31) при p1 = 0, p2 = 1 (слайд Pend_ph.ini).
3.3 Системы ОДУ
70
2.4
1.6
0.8
0.0
y
-0.8
-1.6
-2.4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.36. Отображение Пуанкаре для системы (3.31) при p1 = 0.3, p2 = 1 (слайд
Pend_res.ini).
Параметрический маятник
Имя в WInSet: PendulumParam
Система:
(
dx
dt
dy
dt
= y
= − sin(x) + p1 cos(p4 t) sin(x) + (p2 + p3 cos x)y
(3.32)
Параметры: p1 = 0.1, p2 = 0, p3 = 0, p4 = 2 (по умолчанию)
Слайды: Pend_par_1.ini, Pend_par1.ini, Pend_par2.ini, Pend_par3.ini
2.4
1.6
0.8
y 0.0
-0.8
-1.6
-2.4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.37. Отображение Пуанкаре для системы (3.32) при p1 = 0.1, p2 = 0, p3 = 0, p4 = 2
(слайд Pend_par_1.ini).
3.3 Системы ОДУ
71
Маятник – генератор циклов
Имя в WInSet: PendulumMorozov
Система:
(
dx
dt
dy
dt
= y
= − sin(x) + (p1 + cos(p3 x))(1 + p4 sin(p5 t)
(3.33)
Параметры: p1 = −0.0285, p2 = 1, p3 = 3, p4 = 0, p5 = 1
Слайды: Pend_M1.ini, Pend_M2.ini, Pend_M3.ini
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.38. Фазовый портрет системы (3.33) при p1 = −0.0285, p2 = 1, p3 = 3, p4 = 0,
p5 = 1 (слайд Pend_M3.ini).
Полигармонический маятник
Имя в WInSet: PendulumPoly
Система:
(
dx
dt
dy
dt
= y
= −p1 sin(x) − p2 sin(3x) + p3 sin(p4 t)
(3.34)
Параметры: p1 = 0.2, p2 = −1, p3 = 0.1, p4 = 1 (по умолчанию)
Слайды: Pend_poly1.ini, Pend_poly2.ini, Pend_poly3.ini, Pend_poly4.ini,
Pend_poly_1.ini
3.3 Системы ОДУ
72
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.39. Фазовый портрет системы (3.34) при p1 = 0.5, p2 = −1, p3 = 0, p4 = 1 (слайд
Pend_poly1.ini).
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.40. Структура резонансов системы (3.34) при p1 = 0.2, p2 = −1, p3 = 0.1, p4 = 1
(слайд Pend_poly_1.ini).
3.3 Системы ОДУ
3.3.4
73
Гамильтонова система на торе
Имя в WInSet: Hamilton Torus
Система:
(
dx
dt
dy
dt
= − sin y(1 − p1 cos(p2 t))
= sin x(1 + p1 cos(p2 t))
(3.35)
Параметры: p1 = 0.5, p2 = 3.142 (по умолчанию)
Слайды: Hamilton.ini, Hamilton_ph.ini
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.41. Фазовая плоскость системы (3.35) при p1 = 0, p2 = 3.142 (слайд
Hamilton_ph.ini).
2.4
1.6
0.8
y
0.0
-0.8
-1.6
-2.4
-2.4
-1.6
-0.8
0.0
0.8
1.6
2.4
x
Рис. 3.42. Структура резонансов системы (3.35) при p1 = 0.5, p2 = 3.142 (слайд
Hamilton.ini).
3.3 Системы ОДУ
3.3.5
74
Система типа Хенона-Хейлеса
Имя в WInSet: Henon-Heiles
Система:
dx
dt
dy
dt
dz
dt
dw
dt
=z
=w
(3.36)
= −p1 x − 2p4 xy
= −p2 y + p3 y 2 + p4 (−x2 + p5 w + p6 yw)
Параметры: p1 = 1, p2 = 1, p3 = 1, p4 = 1, p5 = 0, p6 = 0 (по умолчанию)
Слайды: H&H.ini
0.4
0.2
x4
0.0
-0.2
-0.4
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
x2
Рис. 3.43. Отображение Пуанкаре системы (3.36) при p1 = 1, p2 = 1, p3 = 1, p4 = 0.5,
p5 = 0, p6 = 0 и значении интеграла энергии h = 1/6 (слайд H&H.ini).
3.3.6
Модель системы Хенона-Хейлеса
Имя в WInSet: Model for Henon-Heiles
Система:
(
dx
dt
dy
dt
=y
= −p1 x − p2 x2 + p3 (sin(p4 t))2
Параметры: p1 = 1, p2 = −1, p3 = −0.1, p4 = 1 (по умолчанию)
Слайды: Model_H&H.ini
(3.37)
3.3 Системы ОДУ
75
0.6
0.4
0.2
y
0.0
-0.2
-0.4
-0.6
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
x
Рис. 3.44. Отображение Пуанкаре системы (3.37) при p1 = 1, p2 = −1, p3 = −0.1, p4 = 1
(слайд Model_H&H.ini).
3.3.7
Система Вольтерра
Имя в WInSet: Volterra
Система:
(
dx
dt
dy
dt
x
−1 y
= ey − 1 + p2 pe2 +e
2x e
x
−1 x
= p1 (1 − ex ) − p1 p2 pe2 +e
2x e
(3.38)
Параметры: p1 = 1, p2 = 0.001 (по умолчанию)
Слайды: Volterra.ini
1.2
0.8
0.4
0.0
y
-0.4
-0.8
-1.2
-1.6
-1.2
-0.8
-0.4
0.0
0.4
0.8
x
Рис. 3.45. Фазовая плоскость системы (3.38) при p1 = 2, p2 = 0 (слайд Volterra.ini).
3.3.8
Система Колмогорова-Вольтерра
Имя в WInSet: Kolmogorov-Volterra
3.3 Системы ОДУ
76
Система:
(
dx
dt
dy
dt
=
=
p3 −x2
x−
1+x2
p2 x2 −1
y
x2 +1
x
p1 1+x
2y
(3.39)
Параметры: p1 = 2, p2 = 2, p3 = 4 (по умолчанию)
Слайды: KV_1.ini, KV_2.ini, KV_3.ini
3.6
3.2
2.8
2.4
y
2.0
1.6
1.2
0.8
0.4
0.0
0.4
0.8
1.2
1.6
2.0
x
Рис. 3.46. Фазовая плоскость системы (3.39) при p1 = 2, p2 = 2, p3 = 4 (слайд KV_1.ini).
3.3.9
Брюсселятор
Имя в WInSet: Brusselator
Система:
(
dx
dt
dy
dt
= p1 − p2 x + x2 y − x,
= p2 x − x2 y
(3.40)
Параметры: p1 = 0.5, p2 = 0 (по умолчанию)
Слайды: Brus_1.ini, Brus_2.ini, Brus_3.ini
3.6
3.2
2.8
2.4
y
2.0
1.6
1.2
0.8
0.4
0.2
0.4
0.6
0.8
1.0
1.2
1.4
x
Рис. 3.47. Фазовая плоскость системы (3.40) при p1 = 0.5, p2 = 1.5 (слайд Brus_3.ini).
3.3 Системы ОДУ
3.3.10
77
Система Кеплера
Имя в WInSet: Kepler
Система:
(
dx
dt
dy
dt
=y
= − xp12 +
p2
x3
+ p3 sin(p4 t)
(3.41)
Параметры: p1 = 1, p2 = 1, p3 = 0, p4 = 1 (по умолчанию)
Слайды: Kepler_ph.ini, Kepler_res.ini
3
2
1
y
0
-1
-2
-3
0.5
1.0
1.5
2.0
2.5
3.0
3.5
x
Рис. 3.48. Фазовая плоскость системы (3.41) при p1 = 1, p2 = 1, p3 = 0, p4 = 1 (слайд
Kepler_ph.ini).
0.8
0.6
0.4
0.2
y
0.0
-0.2
-0.4
-0.6
-0.8
1
2
3
4
x
Рис. 3.49. Структура резонансов системы (3.41) при p1 = 1, p2 = 1, p3 = −0.01, p4 = 1
(слайд Kepler_res.ini).
3.3 Системы ОДУ
3.3.11
78
Движение частицы в поле тяготения
Имя в WInSet: Kepler1
Система:
dx
dt
dy
dt
dz
dt
=y
=
z2
x3
−
p1
x2
− p2 yFkepl
= −p2 yFkepl
F
1
kepl = p3 − x (p4 + sin(p5 t))
(3.42)
Параметры: p1 = 1, p2 = 0, p3 = 0, p4 = 0, p5 = 1 (по умолчанию)
Слайды: Kepler1_res.ini
Рис. 3.50. Отображение Пуанкаре для системы (3.42) в проекции на плоскость (x, y)
при p1 = 1, p2 = 0.001, p3 = 0, p4 = 0, p5 = 1 (слайд Kepler1_res.ini).
3.3.12
Система Реслера
Имя в WInSet: Roessler
Система:
dx
dt
dy
dt
dz
dt
= −(y + z)
= x + y/5
= 1/5 + z(x − p1 )
Параметры: p1 = 5.7 (по умолчанию)
Слайды: Roessler.ini
(3.43)
3.3 Системы ОДУ
79
x3
20
10
x2
10
-10
-10
0
x1
10
Рис. 3.51. Фазовая кривая системы (3.43) при p1 = 5.7 (странный аттрактор, слайд
Roessler.ini).
3.3.13
Система Лоренца
Имя в WInSet: Lorenz
Система:
dx
dt
dy
dt
dz
dt
= −p1 (x − y)
= −xz − y + p2 x
(3.44)
= −p3 z + yx
Параметры: p1 = 10, p2 = 28, p3 = 2.6 (по умолчанию)
Слайды: Lorenz.ini
x3
40
30
20
10
x2
15
-20
-10
-15
0
10
20
x1
Рис. 3.52. Траектория системы (3.44) при p1 = 10, p2 = 28, p3 = 2.6 (странный аттрактор, слайд Lorenz.ini).
3.4 Диффузионные уравнения
3.3.14
80
Система Чуа
Имя в WInSet: Chua
Система:
dx
dt
dy
dt
dz
dt
= p1 (y − p4 x − (p3 − p4 )[|x + 1| − |x − 1|])
= x−y+z
(3.45)
= −p2 y
Параметры: p1 = 9.85, p2 = 14.3, p3 = −0.14, p4 = 0.28 (по умолчанию)
Слайды: Chua1.ini, Chua2.ini, Chua3.ini, Chua4.ini, Chua5.ini
x3
2.4
1.6
0.8
-2.4
-1.6
-0.8
-1.6
-0.8
1.6
0
0.8
x2
1.6
2.4 x1
-1.6
-2.4
Рис. 3.53. Траектория системы (3.45) при p1 = 9, p2 = 14, p3 = −0.14, p4 = 0.28 (странный аттрактор, слайд Chua1.ini).
3.4
3.4.1
Диффузионные уравнения
Брюсселятор в построянном потоке
Имя в WInSet: Brusselator PDE
Уравнения:
∂u
∂t
∂v
∂t
2
+ p3 ∂u
= p1 − p2 u − u + u2 v + p4 ∂∂xu2 ,
∂x
∂v
+ p3 ∂x
= p 2 u − u2 v +
∂2v
.
∂x2
Параметры: p1 = 1, p2 = 3, p3 = 1, p4 = 0.25 (по умолчанию)
(3.46)
3.4 Диффузионные уравнения
81
Рис. 3.54. Решение системы (3.46) при p1 = 1, p2 = 3, p3 = 1.5, p4 = 0.25.
3.4.2
Система Фитц Хью-Нагумо
Имя в WInSet: Fitz Hugh-Nagumo
Уравнения:
∂u
∂t
∂v
∂t
= p1 ∆u +
1
(u
p4
− 13 u3 − v),
= p4 (u − p3 v + p2 ).
(3.47)
Параметры: p1 = 1, p2 = 0.2, p3 = 0.5, p4 = 0.2 (по умолчанию)
Рис. 3.55. Образование паттернов в системе ФитцХью-Нагумо при p1 = 1, p2 = 0.2,
p3 = 0.5, p4 = 0.2 в различные моменты времени t.
3.4.3
Модель Лингейла-Эпштейна (CIMA)
Имя в WInSet: Lengyel-Epstein
Уравнения:
∂u
∂t
∂v
∂t
4uv
1+u2
+ ∇2 u,
uv
= p2 p3 u − 1+u
+ p 4 ∇2 v .
2
= p1− u −
(3.48)
3.5 Используемые численные формулы
82
Параметры: p1 = 12, p2 = 11, p3 = 0.5, p4 = 1.5 (по умолчанию)
Рис. 3.56. Паттерны в системе (3.48) при p1 = 12, p2 = 11, p3 = 0.5, p4 = 1.5.
3.4.4
Полудискретная модель нейронной решетки
Имя в WInSet: Neuron Model 2
Уравнения:
uij
dt
vij
dt
zij
dt
= vij + 3u2ij − u3ij − zij + p1 + p2 ∇2 u,
= 1 − 5u2ij − vij ,
(3.49)
= p3 (−zij + p4 (uij + 1.6)).
Параметры: p1 = 3.281, p2 = 1.5, p3 = 0.0021, p4 = 4 (по умолчанию)
Рис. 3.57. Паттерны в системе (3.49) при p2 = 1.5 в различние моменты времени t.
3.5
Используемые численные формулы
Для численного интегрирования систем дифференциальных уравнений мы используем одношаговые формулы Рунге-Кутта. Приведем эти формулы для двумерных систем:
3.5 Используемые численные формулы
(
dx
dt
dy
dt
83
= f1 (t, x, y)
= f2 (t, x, y)
(3.50)
Для систем большей размерности легко понять, как написать соответствующие формулы.
3.5.1
Метод Рунге-Кутта первого порядка. Формула Эйлера.
Разностная формула:
(
x2 = x1 + τ f1 (t, x1 , y1 )
y2 = y1 + τ f2 (t, x1 , y1 )
(3.51)
где f1 , f2 - правые части системы, τ - шаг интегрирования.
Принцип построения формул более высокого порядка.
Методы Рунге-Кутта основаны на разложении решений уравнения (3.50) в ряд Тейлора на разностной сетке ωτ = {tn = nτ } в окрестности точки tn
x(tn+1 ) = x(tn ) + τ x0 (tn ) +
y(tn+1 ) = y(tn ) + τ y 0 (tn ) +
3
τ 2 00
x (tn ) + τ6 x000 (tn ) + ...
2
3
τ 2 00
y (tn ) + τ6 y 000 (tn ) + ...
2
и отбрасывании членов соответствующего порядка (подробности см., например, в [8]).
Так, чтобы получить метод Рунге-Кутта первого порядка, или формулу Эйлера, надо
отбросить в разложении члены второго порядка. При построении формул более высокого порядка, поступают аналогично описанной выше схеме, отбрасывая члены соответственно третьего, четвертого, пятого порядков и т.д.
3.5.2
Метод Рунге-Кутта четвертого порядка.
Разностная формула:
(
x2 = x1 + τ6 (k1x + 4k3x + k4x )
y2 = y1 + τ6 (k1y + 4k3y + k4y )
(3.52)
3.5 Используемые численные формулы
84
k1x = f1 (t, x1 , y1 )
k1y = f2 (t, x1 , y1 )
k2x = f1 (t + τ2 , x1 + τ2 k1x , y1 + τ2 k1y )
k2y = f2 (t + τ2 , x1 + τ2 k1x , y1 + τ2 k1y )
k3x = f1 (t + τ2 , x1 + τ4 (k1x + k2x ), y1 + τ4 (k1y + k2y ))
k3y = f2 (t + τ2 , x1 + τ4 (k1x + k2x ), y1 + τ4 (k1y + k2y ))
k4x = f1 (t + τ, x1 − τ k2x + 2τ k3x , y1 − τ k2y + 2τ k3y )
k4y = f2 (t + τ, x1 − τ k2x + 2τ k3x , y1 − τ k2y + 2τ k3y )
k5x = f1 (t + 32 τ, x1 +
τ
(7k1x
27
+ 10k2x + k4x ), y1 +
τ
+ 27
(7k1y + 10k2y + k4y ))
k5y = f2 (t + 23 τ, x1 +
τ
(7k1x
27
+ 10k2x + k4x ), y1 +
τ
+ 27
(7k1y + 10k2y + k4y ))
k6x = f1 (t + τ5 , x1 +
τ
(28k1x − 125k2x + 546k3x + 54k4x −
625
τ
−378k5x ), y1 + 625
(28k1y − 125k2y + 546k3y +
+54k4y − 378k5y ))
τ
(28k1x − 125k2x + 546k3x + 54k4x −
625
τ
−378k5x ), y1 + 625
(28k1y − 125k2y + 546k3y +
k6y = f2 (t + τ5 , x1 +
+54k4y − 378k5y ))
Погрешность метода:
rx =
ry =
3.5.3
τ
(42k1x
336
τ
(42k1y
336
+ 224k3x + 21k4x − 162k5x − 125k6x )
+ 224k3y + 21k4y − 162k5y − 125k6y )
Метод Мерсона четвертого порядка.
Разностная формула:
(
x2 = x1 + τ2 (k1x + 4k4x + k5x )
y2 = y1 + τ2 (k1y + 4k4y + k5y )
(3.53)
3.5 Используемые численные формулы
85
k1x = f1 (t, x1 , y1 )/3
k1y = f2 (t, x1 , y1 )/3
k2x = f1 (t + τ3 , x1 + τ k1x , y1 + τ k1y )/3
k2y = f2 (t + τ3 , x1 + τ k1x , y1 + τ k1y )/3
k3x = f1 (t + τ3 , x1 + τ2 (k1x + k2x ), y1 + τ2 (k1y + k2y ))/3
k3y = f2 (t + τ3 , x1 + τ2 (k1x + k2x ), y1 + τ2 (k1y + k2y ))/3
k4x = f1 (t + τ2 , x1 + τ ( 3k81x +
k4y = f2 (t + τ2 , x1 + τ ( 3k81x +
k5x = f1 (t + τ, x1 + τ ( 3k21x −
9k3x
), y1 + τ ( 3k81y + 9k83y ))/3
8
9k3x
), y1 + τ ( 3k81y + 9k83y ))/3
8
9k3x
+ 6k4x ), y1 + τ ( 3k21y −
2
− 9k23y + 6k4y )/3
k5y = f2 (t + τ, x1 + τ ( 3k21x −
9k3x
2
+ 6k4x ), y1 + τ ( 3k21y −
− 9k23y + 6k4y )/3
Погрешность метода:
rx = τ5 (k1x −
ry = τ5 (k1y −
9k3x
2
9k3y
2
+ 4k4x −
+ 4k4y −
k5x
)
2
k5y
)
2
ЛИТЕРАТУРА
[1] Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Качественная теория
динамических систем второго порядка. – М.: Наука, 1966.
[2] Андронов А.А., Леонтович Е.А., Гордон И.И., Майер А.Г. Теория бифуркаций
динамических систем на плоскости. – М.: Наука, 1967.
[3] Арнольд В.И. Доказательство теоеремы Колмогорова о сохранении условно периодических движений при малом изменении функции Гамильтона // УМН, 1963,
Т. 18, вып. 5 (113). С. 13–40.
[4] Арнольд В.И. Малые знаменатели и проблема устойчивости движения в классической и небесной механике // УМН, 1963, Т. 18, вып. 6(114). С. 81–192.
[5] Арнольд В.И. Дополнительные главы теории обыкновенных дифференциальных
уравнений. – М.: Наука, 1978.
[6] Афраймович В.С. Внутренние бифуркации и кризисы аттракторов // В сб. Нелинейные волны. Под ред. А.В.Гапонова-Грехова и М.И.Рабиновича. – М.: Наука,
1987. С. 189–213.
[7] Афраймович В.С., Гаврилов Н.К., Лукьянов В.И., Шильников Л.П. Основные
бифуркации динамических систем. – Горький: Изд-во ГГУ (ННГУ), 1985.
[8] Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы.– М.: Наука,
1987.
[9] Берже П. Конвекция Релея-Бенара в жидкостях с высоким числом Прандтля. –
В сб. Синергетика. Под ред. Кадомцева Б.Б., – М.: Мир, 1984, С. 220–233.
[10] Бондаренко Н.Ф., Гак М.З., Должанский Ф.В. Лабораторная и теоретическая модели плоского периодического движения // Изв. АН СССР. Физика атмосферы и
океана, 1979, Т. 15, № 10. С. 1017–1026.
[11] Вейль Г. Симметрия. – М.: Мир, 1968, 191 с.
[12] Гледзер Е.Б., Должанский Ф.В., Обухов А.М. Системы гидродинамического типа
и их применение. – М.: Наука. 1981. 366 с.
86
Литература
87
[13] Гребенников Е.А., Рябов Ю.А. Резонансы и малые знаменатели в небесной
механике.-М.: Наука, 1976.
[14] Довженко В.А., Должанский Ф.В. Генерация вихрей в сдвиговых течениях. Теория и эксперимент // В сб. Нелинейные волны. Под ред. А.В. Гапонова-Грехова
и М.И. Рабиновича. – М.: Наука. 1987. С. 132–147.
[15] Заславский Г.М., Сагдеев Р.З., Усиков Д.А., Черников А.А. Минимальный хаос,
стохастическая паутина и структуры с симметрией типа «квазикристалл». – Препринт. ИКИ АН СССР. – М., 1987.– № 1289.
[16] Колмогоров А.Н. О сохранении условно периодических движений при малом изменении функции Гамильтона // ДАН СССР, 1954, Т. 98. С. 527-530.
[17] Лихтенберг А., Либерман М. Регулярная и стохастическая динамика. – М.: Мир,
1984.
[18] Лоренц Э.Н. Детерминированное непериодическое течение // В книге «Странные
аттракторы». – М.: Мир, 1981. – С. 88–116.
[19] Мозер Ю. Об инвариантных кривых сохраняющего площадь отображения кольца
в себя // Сб. переводов Математика. 1963. – 6:5. С. 51–67.
[20] Мозер Ю. Быстро сходящийся метод итераций и нелинейные дифференциальные
уравнения // УМН. 1968. Т. 23, № 4. С. 179-238.
[21] Морозов А.Д., Драгунов Т.Н., Бойкова С.А., Малышева О.В. Инвариантные множества динамических систем в Windows. – М.: Изд-во «УРСС», 1998.
[22] Морозов А.Д. Введение в теорию фракталов. – Москва-Ижевск: Институт компьютерных исследований, Сер. Современная математика, 2002.
[23] Морозов А.Д., Драгунов Т.Н. Визуализация и анализ инвариантных множеств
динамических систем. – Москва-Ижевск: Институт компьютерых исследований,
2003, 304 стр.
[24] Морозов А.Д. Резонансы, циклы и хаос в квазиконсервативных системах.-МоскваИжевск: РХД, 2005, 422 стр.
[25] Немыцкий В.В., Степанов В.В. Качественная теория дифференциальных уравнений. – М.-Л.: Гостехиздат, 1947.
Литература
88
[26] Плисс В.А. Интегральные множества периодических систем дифференциальных
уравнений. – М.: Наука, 1977.
[27] Рабинович М.И., Езерский А.Б. Динамическая теория формообразования. – М.:
изд-во «Янус-К», 1998.
[28] Рюэль Д., Такенс Ф. О природе турбулентности // В книге «Странные аттракторы». – М.: Мир, 1981. С. 117–151.
[29] Симо К., Брур Х., Джервер Дж., Джиорджилли А., Лазуткин В.Ф., Монтгомери Р., Смейл С., Стучи Т., Шенсине А. Современные проблемы хаоса и
нелинейности.-Москва-Ижевск: ИКИ, 2002, 304 c.
[30] Шильников Л.П. Об одной задаче Пуанкаре-Биркгофа // Матем. сб. 1967, Т. 74,
№ 3. С. 378–397.
[31] Шильников Л.П. К вопросу о структуре расширенной окрестности грубого состояния равновесия типа седло-фокус // Матем. сб. 1970, Т. 81, № 1. С. 92–103.
[32] Экман Ж.-П. Переход к турбулентности в диссипативных системах // В кн. Синергетика. – М.: Мир, 1984. С. 190–219.
[33] Falconer K.J. Fractal Geometry: Mathematical Foundations and Applications.-New
York: John Wiley,1990.
[34] Lauwerier H. Fractals – images of chaos. – Princeton Univ. Press. Princeton. New
Jersey. 1991.
[35] Mandelbrot B.B. The Fractal Geometry of Nature. Freeman & Co. 1983 (Бенуа Мандельброт. Фрактальная геометрия природы.- Москва: Институт компьютерных
исследований, 2002, 656 с. Перевод с англ. под ред. А.Д.Морозова)
[36] Mira C., Gardini L., Barugola A., Chatala J.-C. Chaotic dynamics in two-dimensional
noninvertible maps. – World Sci., Series A. 1995.
[37] Morozov A.D., Dragunov T.N., Boykova S.A. and Malysheva O.V. Invariant Sets for
Windows: Resonance Structures, Attractors, Fractals and Patterns. – World Sci., 1999.
Ser. on Nonlinear Sci., Series A, V. 37.
[38] Smith B. et al. Reports Voyager 2 Encounter with the Saturnian System // J. Science,
1982, V. 215, No. 4532, P. 499–537.
Литература
89
[39] Wegner T., Peterson M., Tyler B., Branderhorst P. Fractals for Windows. – Weit Group
Press, 1992.