*** 539
реклама

УДК 539.3
ЗАДАЧА МНОЖЕСТВЕННОГО КОНТАКТА ДЛЯ ТЕЛ
С ПОВЕРХНОСТНО-НЕОДНОРОДНЫМИ ПОКРЫТИЯМИ
С.П. Курдина
Московский государственный университет приборостроения и информатики
Одним из наиболее эффективных способов увеличения износо-контактной прочности тел и вместе с ней увеличения ресурса работы реальных узлов механизмов и деталей машин является использование различного рода
покрытий. Вследствие особенностей нанесения покрытий на основной слой, а также при поверхностной обработке уже нанесенных покрытий (лазерная обработка, ионная имплантация и т.д.) может образоваться неоднородность этого покрытия. Неоднородность может быть вызвана также использованием различных материалов
при изготовлении покрытий. В работе исследуется плоское контактное взаимодействие системы жестких
штампов и вязкоупругого основания с тонким упругим поверхностно неоднородным покрытием, то есть покрытием, свойства которого меняются от точки к точке его поверхности, но постоянны по глубине. Для указанной задачи выведена разрешающая система смешанных интегральных уравнений, которая в функциональном
векторном пространстве приведена к единому операторному уравнению с тензорным ядром и к векторным дополнительным условиям.
Ключевые слова: контактная задача, неоднородное покрытие, смешанные интегральные уравнения.
Вязкоупругое стареющее основание с
тонким упругим покрытием, свойства которого меняются от точки к точке его поверхности, но постоянны по глубине (поверхностно неоднородное покрытие), лежит на
жестком недеформируемом подстилающем
основании. Жесткость нижнего слоя не
меньше жесткости покрытия. Между слоями,
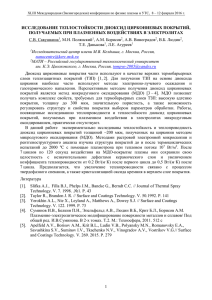
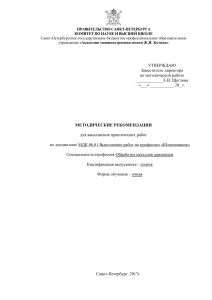
а также между нижним слоем и подстилающим основанием может осуществляться либо идеальный, либо гладкий контакт (рис. 1).
В некоторый момент времени в такое
слоистое основание начинают вдавливаться
жесткие штампы одинаковой ширины различными силами и эксцентриситетами их
приложения. Области контакта со временем
не изменяются и равны ширинам штампов.
Также считается, что жесткости под штампами описываются одинаковыми функциями.
Можно показать, что безразмерная математическая модель описанного процесса
представляет из себя систему смешанных
интегральных уравнений с дополнительными условиями
Рис. 1. Множественный контакт.
где n — количество штампов, q i ( x, t ) , P i (t ) ,
n
c(t )m( x)q i ( x, t ) (I V ) F ij q j ( x, t )
j 1
i (t ) i (t ) x g i ( x),
1
1
1
1
M i (t ) , i (t ) , i (t ) , g i (x) — безразмерные
функции контактных давлений, сил приложения, моментов приложения сил, осадок,
углов поворотов и форм оснований штампов;
c (t ) — функция времени, связанная с модулем упругомгновенной деформации нижнего
слоя, m(x) — функция координаты, связан-
(1)
x [1,1],
q i ( , t ) d P i (t ),
q i ( , t ) d M i (t ), i 1, n,
(2)
69
c(t )Q( x, t ) (I V)FQ ( x, t )
ная с функцией жесткости покрытия; I —
тождественный оператор, V — интегральный оператор Вольтерра, Fij — интегральные операторы Фредгольма, ядра которых
k ij ( x, ) связаны с известным ядром плоской
контактной задачи.
На каждом штампе можно задач один
из 4 типов условий: осадку и угол поворота,
вдавливающую силу и момент, осадку и момент, силу и угол поворота (в силу задачи
невозможно задать вдавливающую силу и
осадку, либо момент и угол поворота). Разумеется, на каждом штампе возможен различный набор условий. Можно показать, что тогда существует всего 15 возможных вариантов постановки задачи: 4 варианта при одной
группе штампов, 6 вариантов при двух группах штампов, 4 варианта для 3 групп и 1 вариант для 4 групп штампов. В данной работе
рассмотрим лишь решение для 1 группы
штампов, когда на всех штампах заданы сила
и момент. Решения для остальных 14 вариантов будут строится аналогично.
Приведем систему уравнений (1) с дополнительными условиями (2) к одному операторному уравнению с двумя дополнительными векторными условиями. Примем, что
(5)
[δ(t ) α(t ) x g( x)] m( x) Δ( x, t ),
1 q( , t )
1 q( , t )
1 m( ) d P(t ), 1 m( ) d M(t ). (6)
Решение полученного разрешающего
операторного уравнения (5) с векторными
дополнительными условиями (6) будем
строить в классе вектор–функций из гильбертова пространства L2 ([1,1], V ) . Так как в
операторное уравнение и дополнительные
условия входит функция m(x) , связанная с
поверхностной неоднородностью покрытия,
то при построении решения следует учитывать, что эта функция может быть быстроосциллирующей и даже разрывной. Поэтому в
структуру функционального базиса должна
входить функция m(x) . Система ортонормированных базисных вектор–функций, удовлетворяющая вышеописанным условиям,
сможет быть построена по следующему правилу
p ik* ( x)
i
p k ( x)
, p ik* ( x) pk* ( x)i i ,
m( x )
q( x, t ) q i ( x, t )i i , δ(t ) i (t )i i , α(t ) i (t )i i ,
pk* ( x)
g( x) g ( x)i i , P(t ) P i (t )i i , M(t ) M i (t )i i ,
1
k ( x, ) k ij ( x, ), Gf ( x) k ( x, ) f ( )d .
dk
Здесь и далее по верхним повторяющимся
индексам производится суммирование от 1
до n , если левая часть формулы не зависит
от этого индекса. Тогда уравнения (1), (2)
можно записать в виде
c(t )m( x)q( x, t ) (I V )Gq ( x, t )
(3)
δ(t ) α (t ) x g( x), x [1,1],
1
1
Jk
J 2 k 1
x
d k 1d k J k 1
1
Jk
, d 1 1,
,
xk
k d
.
1 m( )
1
Jk
являются функции {p i0 ( x), p1i ( x)} , и ортогонального ему гильбертова пространства
i
L(21) ([1,1], V ) с базисом {p k ( x)} , i 1, n ,
Тогда неизвестная вектор–
k 2,3,
функция Q( x, t ) и правая часть уравнения (5)
представимы в виде суммы функций, определенных в пространствах L(20) ([ 1,1], V ) и
Q Q 0 Q1 ,
Δ Δ 0 Δ1 .
L(21) ([ 1,1], V ) :
Причем из дополнительных условий (6) сразу можно определить Q 0 ( x, t ) L(20) ([ 1,1], V ) ,
q( , t ) d P(t ), q( , t ) d M(t ). (4)
1
Q( x, t ) m( x)q( x, t ), K ( x, t )
Jk
J k J 2k
Следуя обобщенному проекционному
методу [3], пространство L2 ([1,1], V ) представим в виде прямой суммы евклидова пространства L(20) ([ 1,1], V ) , базисом которого
1
Введя (3), (4) обозначения
J1
1
J0
1
J0
k ( x, )
,
m( x)m( )
1
Ff ( x) K ( x, ) f ( )d ,
1
получим ( x [1,1] )
70
то есть в нем отдельным сомножителем выделена функция m(x ) , что позволяет производить вычисления в случаях, когда неоднородность покрытия описывается быстроосциллирующими и даже разрывными функциями.
Определив функцию Q1 ( x, t ) можно
найти и осадки и углы поворотов штаммпов,
щдля чего необходимо подействовать оператором P0 на уравнение (5).
Автор благодарен А.В. Манжирову за
постановку задачи, полезные обсуждения и
ценные советы. Работа выполнена при финансовой поддержке Российского фонда
фундаментальных исследований (проект
№ 12-01-00991).
а Δ1 ( x, t ) содержит только известную информацию о формах оснований щтампов.
P0 : L2 L(20 ) ,
Введя
ортопроекторы
P1 I P0 : L2 L(21) и подействовав P1 на
(5), получим уравнение с известной правой
частью
c(t )Q1 ( x, t ) (I V)P1FQ 1 ( x, t )
~ ( x, t ),
Δ1 ( x, t ) (I V)P1FQ 0 ( x, t ) Δ
1
решение которого строится в виде ряда по
собственным функциям оператора P1F :
P1Fφ k ( x) k φ k ( x), φ k ( x) kli p il ( x).
l 2
Тогда функция Q1 ( x, t ) принимает вид
Q1 ( x, t ) z k (t )φ k ( x) ,
k 2
Список литературы
где функции разложения определяются из
соотношений
k (t )
z k (t ) (I Wk )
,
c(t ) k
k (t ) — функции разложения правой части
~
по Δ
1 ( x, t ) по базису φ k (x) , Wk — операторы Вольтерра с ядром, являющиеся резольвентами ядер k K (t , ) [c(t ) k ] .
Отметим, что решение имеет вид
1
qi ( x, t )
[ p0i* ( x) z0i (t ) p1i* ( x) z1i (t )] ,
m( x)
1. Арутюнян Н. Х., Манжиров А. В. Контактные задачи теории ползучести. – Ереван: Изд-во НАН РА, 1999. 318 с.
2. Александров В. М., Мхитарян С. М. Контактные задачи для тел с тонкими покрытиями и прослойками. – М.: Наука, 1983.
488 с.
3. Polyanin A. D., Manzhirov A.V. Handbook of
Integral Equations, 2nd edition. – Boca Raton: Chapman & Hall/ CRC, 2008. 1144 p.
PROBLEM OF MULTIPLE CONTACT FOR BODIES
WITH INHOMOGENEOUS COATINGS
S.P. Kurdina
Moscow State University of Instrument Engineering and Computer Science
Using various kinds of coatings is one of the most effective ways to increase the wear resistance of the contact bodies
and the service life of real mechanism units and machine parts. Due to the nature of laying of coatings on the base layer
and a surface treatment of existing coatings (laser treatment, ion implantation, etc.) the coating inhomogeneity can be
formed. The inhomogeneity can also be caused by using different materials in the manufacture of coatings.
We study plane contact interaction between system of rigid punches and viscoelastic foundations with thin elastic surface inhomogeneous coatings (coating properties vary from point to point of its surface, but constant over the depth).We
derive basic mixed system of integral equations. It is reduced to an operator equation with a tensor kernel and vector
additional conditions in a functional vector space.
Keywords: contact problem, inhomogeneous coating, mixed integral equations.
71