Вимоги щодо оформлення статей
реклама

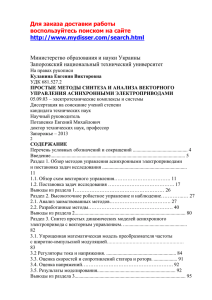
УДК 681.513.5 РОБАСТНОЕ УПРАВЛЕНИЕ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С МИНИМИЗАЦИЕЙ ПОТРЕБЛЯЕМОЙ МОЩНОСТИ Д.т.н. Е.М. Потапенко, А.А.Шийка Запорожский национальный технический университет ул. Жуковского, 64, г. Запорожье, 69063, Украина. Е-mail: AndreyShiyka@gmail.com Разработан метод минимизации потребляемой мощности в реальном времени асинхронным электроприводом (АЭП) с векторным управлением при скоростях, не вызывающих проявление ограничений тока и (или) напряжения. В потребляемую мощность включены потери на нагрев в обмотках статора и ротора двигателя (потери в меди), потери в стали (за счет вихревых токов), а также механическая мощность. Предложенный метод позволяет значительно снизить энергопотребление АЭП по сравнению с известными методами. В качестве примера приведены результаты моделирования работы АЭП поворота антенны радиолокатора с управлением по предлагаемому методу, подтверждающие его ожидаемые характеристики. Ключевые слова: асинхронный двигатель, векторное управление, оптимальное управление, робастное управление, минимизация потерь мощности, управление скоростью. РОБАСТНЕ КЕРУВАННЯ АСИНХРОННИМ ЕЛЕКТРОПРИВОДОМ З МІНІМІЗАЦІЄЮ СПОЖИВАНОЇ ПОТУЖНОСТІ Д.т.н. Є.М. Потапенко, А.А.Шийка Запорізький національний технічний університет вул. Жуковського, 64, м. Запоріжжя, 69063, Україна. Е-mail: AndreyShiyka@gmail.com Розроблено метод мінімізації споживаної потужності у реальному часі асинхронним електроприводом (АЕП) з векторним керуванням при швидкостях, що не викликають проявлення обмежень струму та (або) напруги. В споживану потужність включені втрати на нагрів в обмотках статора і ротора двигуна (втрати у міді), втрати в сталі (за рахунок вихрових струмів), а також механічна потужність. Запропонований метод дозволяє суттєво зменшити енергоспоживання АЕП у порівнянні з відомими методами. У якості прикладу наведені результати моделювання роботи АЕП обертання антени радіолокатора з керуванням по запропонованому методу, які підтверджують його очікувані характеристики. Ключові слова: асинхронний двигун, векторне керування, оптимальне керування, робастне керування, мінімізація втрат потужності, керування швидкістю АКТУАЛЬНОСТЬ РАБОТЫ. В настоящее время все большую остроту приобретает глобальная проблема энергосбережения. Около 80% вырабатываемой электроэнергии в мире потребляется электроприводом. Среди регулируемых электроприводов доминирующее положение занимают частотнорегулируемые асинхронные электроприводы. Наиболее перспективным способом управления АЭП в настоящее время является принцип векторного управления (ВУ). Применение оптимального векторного управления позволяет существенно расширить области использования АЭП, улучшить их эксплуатационные характеристики. Помимо общепромышленного применения, АЭП с ВУ в последнее время все больше используется в системах специального назначения, а именно, в качестве тягового привода в железнодорожном, городском и автомобильном транспорте, для вращения антенн радиолокаторов и в других областях. Такие системы чаще всего работают от автономных источников питания, мощность которых ограничена. Кроме этого, для таких систем характерны частые изменения скорости, нагрузки, инерционных характеристик. Поэтому актуальной является разработка робастных методов управления АЭП, минимизирующих потребляемую мощность при широком изменении скоростей и нагрузок. В большинстве публикаций, посвященных минимизации потребляемой мощности, учитываются потери на нагрев обмоток статора и ротора АД, а потери в стали АД, связанные с образованием вихревых токов и потерь на гистерезис, обычно не рассматриваются. Важность учета потерь в стали определяется существенным вкладом этих потерь в суммарные потери АД при больших скоростях. Так, для АД серии 4А они составляют 20% от суммарных потерь АД в номинальных режимах [1]. При работе со скоростями выше номинальной, потери в стали становятся доминирующими, т.к. они зависят от синхронной скорости [2]. Данная работа посвящена синтезу оптимального робастного управления АЭП, минимизирующего потребляемую мощность, в диапазоне скоростей от малых до скоростей, определяемых ограничениями тока и (или) напряжения. Примечание. Вопросы синтеза и анализа управления АД, максимизирующего модуль электромагнитного момента в диапазоне скоростей выше скорости, определяемой ограничениями тока и (или) напряжения, решались в работе [3]. МАТЕРИАЛ И РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ. 1. Постановка задачи. Уравнения электромагнитных процессов АД, записанные относительно токов статора и потокосцепления ротора в синхронном базисе (d,q), ориентированном по вектору потокосцепления ротора, можно привести к виду [4,5]: di u Ls ( Rs Rr L2mr ) i 0 Ls Ji dt (1) 1 T Lmr ( E Tr n J )[ d 0] Vm , Моделювання та методи оптимізації Tr p d d Lmid , (2) m nLmr d iq , (3) I m ml m f , (4) 0 n sl n Lm iq , (5) Tr r где , i, u – векторы потокосцепления ротора, тока и напряжения статора; m – электромагнитный момент; ml , m f , I – неизвестные моменты нагрузки, трения, инерции; n – количество пар полюсов; RS , Rr – активные сопротивления фаз статора и ротора; Ls ,Lr ,Lm – индуктивности фаз статора, ротора и взаимная индуктивность; 1 L2m / Ls Lr – коэффици- ент рассеивания; Tr Lr Rr – постоянная времени роторной цепи; 0 – скорость вращения вектора потокосцепления ротора (синхронная скорость); , Sl – скорости ротора и скольжения; p – оператор дифференцирования; Vm – вектор напряжения цепи 1 0 0 1 ; J намагничивания; E . 0 1 1 0 Примечания. 1. В нашем случае сопротивление Rs представляет собой полное сопротивление контура тока, включающее в себя суммарное сопротивление статора двигателя, кабеля и эквивалентное сопротивление преобразователя частоты. 2. Уравнения (1)–(5) получены при условии равенства мощностей трехфазной и эквивалентной двухфазной моделей АД. В этом случае токи и напряжения двухфазной синхронной модели в 3 2 раз больше амплитудных значений фазных токов и напряжений трехфазной модели. 3. Проекции вектора напряжения цепи намагничивания Vm , определяющего потери в стали, имеют вид [2] L Vdm 0 Lm lr iq , Vqm 0 Lm id , (6) Lr где Llr Lr Lm – индуктивность рассеивания ротора [6]. 4. В дальнейшем р в индексах токов и напряжений указывает на их программные значения. Полные уравнения АД являются нелинейными, неопределенными, нестационарными. В публикациях [4, 5] по уравнениям (2)–(4) разработан регулятор, формирующий желаемый электромагнитный момент m p , обеспечивающий заданное вращение idp k mp nL , iqp 1 k mp nL sign (m p ), (7) где L L2m 0 Lr 10 ; k 0 – коэффициент связи токов статора. Такая замена позволяет при заданном электромагнитном моменте проводить минимизацию потребляемой мощности, варьируя не двумя переменными idp , iqp , а одной переменной k . Для уравнений (1)–(4) в работе [5] получено следующее выражение потребляемой мощности АД: 1 d 2 2 2 2 P Ls (idp iqp ) Rs (idp iqp ) 2 dt (8) 2 Rr L2mr iqp mp Lmr idp d PS , где первое слагаемое представляет собой потери рассеяния, второе и третье – потери мощности на нагрев соответственно в обмотках статора и ротора (потери в меди), четвертое слагаемое является полезной механической мощностью, пятое слагаемое – мощность магнитных полей машины, шестое – потери в стали АД. Потери в стали АД состоят из потерь от вихревых токов и гистерезиса. При этом потери в стали статора АД прямо пропорционально зависят от синхронной скорости 0 , тогда как потери в роторе АД пропорциональны скорости скольжения sl [2]. Таким образом, потери в стали ротора АД много меньше потерь стали в статоре АД, и ими можно пренебречь для решения поставленной задачи. Потери в стали статора АД имеют вид [2] 2 V2 1 2 2 Llr 2 0 Lm iqp 02 L2m idp2 , PS m (9) Rm Rm Lr где Rm – сопротивление цепи намагничивания АД. В установившемся режиме потребляемая мощность АД определится выражением 2 2 2 P Rs (idp iqp ) Rr L2mr iqp mp 2 (10) 1 2 2 Llr 2 0 Lm iqp 02 L2m idp2 . Rm Lr Окончательно, потери мощности АД примут вид 1 2 2 P idp2 Rs 0 Lm Rm (11) 2 1 2 2 Llr iqp2 Rs Rr L2mr 0 Lm . Rm Lr Анализ выражения (11) свидетельствует о том, что в зоне низких скоростей доминирующими будут потери в меди АД. С ростом скорости потери в стали будут увеличиваться пропорционально 02 , следовательно при больших скоростях, эти потери будут определяющими. Подстановка токов статора (7), в выражение (10) дает ротора АД, вне зависимости от неопределенности параметров системы (2)–(4). Компенсация влияния разбросов параметров и перекрестных связей, входящих в уравнения (1)–(2), осуществляется робастным регулятор тока, описанным в этих же работах mp [4, 5]. Эти регуляторы используются в данной рабоP Rs (k 2 k 2 ) Rr L2mr k 2 nL sign(m p ) nL те. 2 2. Минимизация потребляемой мощности при 1 2 2 Llr 2 0 Lm k 02 L2m k 2 . заданном электромагнитном моменте. По анало Rm Lr гии с работой [3] вводится замена переменных Моделювання та методи оптимізації (12) Задача состоит в следующем: при заданном электромагнитном моменте m p выбрать такое значение k , при котором потребляемая мощность будет минимальной. Минимум функции (12) достигается при равенстве нулю первой производной данной функции по k. Минимум имеет место при Rs Rr L2mr k 4 Rs 02 L2m L2lr L2r Rm 02 L2m (13) Rm Подстановка k из (13) в (7) дает выражение программных статорных токов, минимизирующих потребляемую мощность, а также мощность потерь. На рис. 1 показана рассчитанная по (13) зависимость оптимального коэффициента связи токов статора k от синхронной скорости АД. Расчет проводится для трехфазного АД 4А100L2У3. (Параметры двигателя приведены в таблице 1). Момент нагрузки принят равным номинальному (18 Нм). На рис. 2 даны статорные токи id , iq , сформированные по (7), Рисунок 1 - Графики зависимостей k (0 ) мощность потерь, вычисленная по выражению (11), показана на рис. 3. Для сравнения на рис. 1–3 построены аналогичные графики, полученные по методу, предлагаемому в работе [7]. Отметим, что при скоростях ниже номинальной, k 1 , id iq , что обеспечивает низкий уровень потерь в меди. При росте скорости значение k уменьшается, вследствие чего становится id iq , следовательно, обеспечива- Рисунок 2 – Токи статора ется автоматическое уменьшение уровня магнитного потока, и уменьшение потерь в стали. 3. Функциональная схема электропривода с предлагаемым оптимизатором представлена на рис. 4. Принципы действия и алгоритмы работы блоков «Регулятор момента» и «Регулятор токов» описаны в монографии [5]. Совокупность выражений (7) и (13) формирует блок «Оптимизатор». Для управления измеряются скорость ротора и две из трех фазы тока, по которым вычисляются токи id , iq . Приведенный момент инерции ротора, внешние воздействия и трение, действующие на него, а также погрешности формирования электромагнитного момента, обусловленные неточностью знания индуктивностей, входящих в выражения (2)–(4), не известны. Регулятор момента формирует желаемый (программный) электромагнитный момент m p , осуществляющий компенсацию влияния неопределенностей и формирование заданного вида движения ротора. Блок «Оптимизатор» по моменту m p и синхронной скорости 0 формирует программные токи idp , iqp . Вычисленные по измерениям фазных токов токи id , iq вычитаются из своих программных токов idp , iqp . Полученные разности подаются в робастные комбинированные регуляторы токов [5], которые компенсируют влияние перекрестных связей между контурами токов, неточностей знания сопротивлений и индуктивностей и формируют программные Рисунок 3- Потери мощности напряжения udp , uqp . Эти напряжения преобразуются в трехфазную форму, которая используется для управления преобразователем частоты, подающим напряжение на АД. 4. Результаты моделирования. На рисунках 5–8 приведены результаты моделирования работы АЭП поворота антенны радиолокатора с управлением по предлагаемому методу. Особенностью данного электропривода является то, что при работе в режиме вращения на антенну действует переменный аэродинамический момент (нагрузка), который можно представить зависимостью. M C M C1 M C 2 sin t, (14) Моделювання та методи оптимізації Рисунок 4 – Функциональная схема системы управления АЭП где M C – суммарный аэродинамический момент, приведенный к валу двигателя; M C1 const , M C 2 – амплитуда приведенного аэродинамического момента; – угловая частота нагрузки. Момент нагрузки, приведенный к валу двигателя, показан на рисунке 5. Как следует из рис. 5, при постоянстве знака скорости ротора нагрузка формирует как двигательный, так и генераторный режимы работы, что вызвано переменностью аэродинамического момента. Передаточное число редуктора привода i 500, заданная программная скорость вращения двигателя p 314 рад / c , приведенный момент инерции Рисунок 7 – Токи статора J 0,0515кг м2 . На рис. 7 даны токи статора, на рис. 8 – потребляемая мощность и мощность потерь АД. Рисунок 5 – Момент нагрузки Рисунок 8 – Потребляемая мощность P и мощность потерь P Таблица 1 Основные параметры двигателя 4А100L2У3 Rs 1, 05Ом Lm 0, 25 Гн Pn 5,5КВт nn 3000об / мин Rr 0, 77Ом Ls 0, 254 Гн n 1 Rm 1000Ом Lr 0, 254 Гн Рисунок 6 –Разгон и стабилизация программой скорости p ВЫВОДЫ. 1. Решается проблема робастного оптимального управления АЭП в текущем (реальном) времени в диапазоне от нулевой скорости до скоростей, определяемых ограничениями тока и (или) напряжения. 2. Показано, что разработанные с участием одного из авторов данной статьи методы робастного формирования электромагнитного момента и регу- Моделювання та методи оптимізації лирования токов, предназначавшиеся для первой зоны управления, работоспособны и во второй зоне, оговоренной в п.1 выводов. 3. Предложенный метод формирования статорных токов по критерию минимума потребляемой мощности (блок «Оптимизатор») обеспечивает значительное уменьшение энергопотребления АЭП по сравнению с известными критериями оптимизации. 4. Благодаря использованию соотношений между статорными токами (7), блок «Оптимизатор» вычисляет программные токи статора, обеспечивающие формирование заданного электромагнитного момента. Этот факт совместно с робастностью регуляторов момента и токов формируют требуемый электромагнитный момент и заданное движение, т.е., вся система является робастной. 5. Неопределенность параметров, входящих в блок «Оптимизатор», приводит только к нарушению оптимальности. Для гарантированного обеспечения оптимальности необходимо идентифицировать упомянутые параметры. Методы идентификации сопротивлений ротора и статора известны. 6. Работоспособность предложенного метода управления проверена моделированием АЭП вращения антенны радиолокатора со сложным характером нагрузки. Следует отметить, что метод обеспечивает работоспособность системы как в двигательном, так и генераторном режимах. ЛИТЕРАТУРА 1. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО Ивановский государственный энергетический универ- ситет имени В.И. Ленина».– Иваново, 2008. 298 с. ISBN 2. S.Lim and K.Nam, Loss-minimising control scheme for induction motors – IEE Proc.-Electr. Power Appl., Vol. 151, No.4, July 2004 3. Потапенко Е.М., Шийка А.А. Оптимальное робастное широкодиапазонное управление скоростью асинхронного двигателя // Радіоелектроніка, інформатика, управління – Запоріжжя: ЗНТУ, 2012.– Вип. 2’2012 – С. 156-162. 4. Потапенко Е.Е. Синтез экстремального робастного управления асинхронным приводом // Е.Е. Потапенко, Е.М. Потапенко. – Технічна електродинаміка. Тематичний випуск. – 2000. – Ч. 6. – С. 34-37. 5. Потапенко Е.М. Робастные алгоритмы векторного управления асинхронным приводом // Е.М. Потапенко, Е.Е. Потапенко. – Запорожье: ЗНТУ. – 2009. – С. 352 6. Novotny, D.W., and Lipo, T.A, Vector control and dynamics of AC drives, (Clarendon Press, Oxford, UK, 1996) 7. Овсянников Е.М., Нгуен Куанг Тхиеу, Нгуен Хак Туан. Управление тяговым асинхронным электроприводом гибридных автомобилей по минимуму потерь и максимуму перегрузочной способности // Сб. научн. тр. 65-ой межд.научн.-техн. конф. Ассоциации автомобильных инженеров (ААИ) «Приоритеты развития отечественного автотракторостроения и подготовки инженерных и научных кадров». – М.: МАМИ, 2009. ROBUST LOSS-MINIMIMISING CONTROL OF INDUCTION MOTOR DRIVE E.M.Potapenko, A.A.Shiyka Zaporizhzhya National Technical University 69063, Ukraine, Zaporizhzhya, Zhukovsky street, 64. Е-mail: AndreyShiyka@gmail.com This paper presents loss-minimizing real-time method of vector control of induction motor drive. Considered power losses in induction motor consist of copper loss and iron loss (hysteresis and eddy current loss). Proposed method determined optimal combination of stator currents, which provided loss minimization in a wide range of rotor speed, limited by current and voltage constraints. The block diagram of robust optimal control system is represented. The validity of proposed method is demonstrated by simulations results of induction motor drive of radar’s antenna in different modes. Кey words: induction motor drive, vector control, optimal control, robust control, loss minimization, speed control REFERENCES 1. Vinogradov A.B. (2008), Vectornoe upravlenie electroprivodami peremennogo toka [Vector control of AC drive] / GOUVPO Ivanovsky State Power University im. V.I. Lenina, Ivanovo, Russia. 2. S.Lim and K.Nam (2004), “Loss-minimising control scheme for induction motors”, IEE Proc.-Electr. Power Appl., Vol. 151, No.4, pp. 385-397. 3. Potapenko E.M. and Shiyka A.A. (2009) “Optimal robust wide speed control of induction machine”, Radioelectronika, informatika, upravlenie, ZNTU, Zaporizhzhya, Vol. 2’2012, pp. 156-162. 4. Potapenko E.E. and Potapenko E.M.(2000) “Synthesis of extreme robust control of induction drive”, Technichna electrodunamica. Tematuchniy sbirnuk Vol.6, pp. 34-37. 5. Potapenko E.M. and Potapenko E.E. (2009), Robustnie algoritmi upravleniya asinhronnim privodom [Robust algorithms of vector control of induction machine], ZNTU, Zaporizhzhya, Ukraine. 6. Novotny, D.W., and Lipo, T.A (1996) Vector control and dynamics of AC drives, Clarendon Press, Oxford, UK. 7. Ovsyannikov E.M., Nguen Kuang Thiey and Nguen Hak Tuan (2009), “Loss-minimising and maximum torque capability control of traction induction drive”, Sb. nauchn. tr. 65-y mezhd. nauchn.-techn. konf. Assotsiatsii automobil’mich inzhenerow (AAI) «Prioritety rasvitiya otechestvennogo avtotractorosroeniya i podgotovki ingenernich i nauchnich kadrow», Moskow, Russia. Моделювання та методи оптимізації