KUKA
Статус: 20.09.2012
версия: P1КSS8 Roboterprogl'8J1'll1\ierU' 1 v2 N (POF-COL)
KUKA
n
r амми
ование
оБQта 1
© Авторское право 2012
KUКA Roboter GmbH
Zugspitzstra~ 140
О-86165 Augsburg
Германия
Копирование данной документации , полностью ИЛИ частично , равно как и предоставление ее
третьим лицам разрешается только с однозначного разрешения компании KUКA Roboter
GmbH .
в системе управления могут работать другие, не описанные вданной документации функции.
Несмотря на это , при новой поставке или при сервисном обслужмвании право на данные ФУН­
КЦИИ отсутствует .
МЫ проверили содержание печатного документа на соответствие описанному аппаратному и
программному обеспечению . Однако , так как отклонения исключить невозможно, полное СООТ­
ветствие нами не гарантируется . Содержащиеся в данном печатном документе сведения ре­
ryлярно проверяются , и необходимые исправления включаются в следующее издание.
Возможны технические изменения , не оказывающие влияния на работу .
Перевод оригинальной документации
KIM-PS5-DOC
РuЫiсаtiоп:
Pub COLLEGE P1KSS8 RоЬоtегргogгаmm iеruпg 1 (PDF-COL) ru
Bookstructure:
Р1 KSS8 RоЬоtеrpгоgгаmmiеruпg 1 V6.1
Верс и я :
Р1 KSS8 RоЬоtеrpгogгаmmiе гuпg 1 V2 ru (PDF-COL)
соде
KUKA
жан",е
Содержание
1
Структура и функции системы робота KU КA ... ......
7
1.1
1.2
Обзор
7
1.3
Механика робота KUКA ...... ... ....
1.4
Система управления роботом (V)KR С4 ...
1.5
1.6
Пульт управления KUКA smartPAD ... .... ...... ...... .. ... .... ........ ...
1.7
1.8
Программирование робота
Система безопасности робота .................. ..
7
8
10
12
13
14
16
2
П еремещение робота
19
2.1
2.2
2.3
2.4
Обзор
2.5
Системы координат относительно робота
.... ..... .... .... ... .... .... ...
Запуск робота ......... ...... ... ....... ...... ..... ...... ....... ..... ..... ....
Обзор smartPAD
.. ....... ...... .... .....
..... ...... ............ .
.. .......... .. ..
.......................... .. .
Чтение и интерпретация сообщений системы управления роботом ............. ... ..
Выбор и установка режима работы ..............
Перемещение осей робота по отдельности
.. ............... ..
..
19
19
21
23
27
28
33
35
38
40
45
2.6
Перемещение робота в универсальной системе координат ....
2.7
2.8
2.9
2.10
Упражнение: управление и перемещение вручную ......
2.11
Упражнение: перемещение вручную в системе координат заготовки ... ...... ...
2.12
Перемещение вручную со стационарным инструментом .... ..... ..
2.13
Упражнение : перемещение вручную со стационарным инструментом .
47
48
3
Ввод робота в эксплуатацию ........................................................ .. ...... ..
49
3.1
3.2
3.3
Обзор
49
49
Юстировка робота ..... . ........................... .
52
3.4
Упражнение: юстировка робота ... ...
3.5
Нагрузки на роботе
3.6
Данные нагрузtU1 инструмента .... ..... .......................... ................................ ..
3.7
Дополнительные нагрузки на робот ........... .
3.8
Калибровка инструмента .............................. ..
3.9
Упражнение: калибровка инструмента со L1Пифтом
3.10
Упражнение: калибровка инструмента с захватом , метод 2 точек ....
3.11
Калибровка базы ................. .... ................... ... .. ................... ..
3.12
3апрос текущего попожения робота ......... ..
3.13
Упражнение: калибровка базы стола , метод 3 точек.
3.14
Калибровка стационарного инструмента ...
56
58
58
59
61
70
73
75
79
81
84
3.15
Калибровка управляемой роботом заготовки
86
3.16
Упражнение : калибровка внешнего инструмента и ведомой роботом заготовки
3.17
Отсоединение пульта smartPAD ........ .. ...................................... ..
87
91
4
Выполнение программы робота .... ... .................... .... .. .... ..
95
4.1
Обзор
4.2
Выполнение перемещения инициализации .
95
95
Перемещение робота в системе координат инстру мента .
Упражнение: перемещение вручную в системе координат инструмента
Перемещение робота в основной системе координат .. ... .. ... .... ... .. ....... .
........... ............ .
Принцип юстировки ..... . ............. .... .
..
...................................... ..................... ..
KUKA
п ог
a"''''1< овамие
обота 1
4.3
Выбор и запуск программ робота ... ....... ...
4.4
У пражнение : выполнение прогрэмм робота ........ .............. ... .
96
102
5
Обращение с файлами программы
103
5.1
5.2
5.3
Обзор
...... ...... ... ... ... .. ..... ... ... ....... -
5.4
5.5
Воспроизведение изменений программ и СОСТОЯНИЙ с ПОМОЩЬЮ протокола .....
107
6
Создание и и зменение запрограммированныx перемещений ..... .....
111
6.1
Обзор
6.2
Создание новой команды перемещения
6.3
6.4
6.5
6.6
Создание перемещений с оптимизацией времени такта (осевое перемещение)
6.7
Упражнение: перемещение по траектории и сглаживание
6.8
6.9
Программирование перемещений с внешней точкой ТСР ...... .. .. ... .. ... ...... ........ ..
Упражнение: программирование перемещения с внешней точкой ТСР .
111
111
113
119
122
130
133
136
136
7
Использование логических функций в программе робота
139
7.1
7.2
7.3
7.4
Обзор
7.5
Программирование функций переключения траектории
7.6
Упражнение: логические команды и функции переключения
139
140
144
147
153
8
Обращение с переменныии
157
8.1
Обзор
8.2
Индикация и изменение значений переменных
8.3
Запрос состояний робота .. .............. .... ..
8.4
Упражнение: индикация системных переменных
157
157
159
160
9
Использование технологических пакетов
161
9.1
Обзор ... .. .............. ........................ ........................... ..... ..
161
9.2
Управление захватом с KUКA.GripperTech
9.3
9.4
9.5
9.6
Программирование захвата с помощью KUКA.GгipperTech
Упражнение: программирование захвата со штифтом
161
162
154
166
168
10
Успешное программирование в KRL ... ......... ........ ..... ...... ........ ........ ...... .
171
10.1
102
10.3
10.4
10.5
Обзор
Структура программ робота
171
171
Создание структуры программы робота
176
11
Работа с системой управления верхнего уровня .. .... .. ........... .... .... .. ..
Создание программных модулей
.... ...... ...... ...... ..... ........ .. ......... ..... .... ............
Обработка программных модулей
.... .. ....... ... ..... ............ ........ .. ... .. ... ....... .... .....
103
103
104
Архивирование и восстановление программ робота ....... ..... ...... ...... ... ..... .. .........
105
.. .. ......................... ... .... ..... .......... ............. ..
.... ... ... .... ..
Упражнение: программа Air - обращение с программой и перемещения РТР .
Создание перемещений по траекториям .
Изменение команд перемещения
................. .. ... .. ... .... . ..
. ........ .. .. .
139
........... .. .... ... .... .... ... ... ..
Введение в программирование логики ... ........ .. .. .. ...................... .. .......... .. ............
Программирование функций ожидания ... .. ....... ... .. .......... .....................................
Программирование лростых функций переключения ......................
............... ..
......... .... ..
Конфигурация KUКA.GгipperTech .. ... ................ .. ..................... ...................... ..
Упражнение: программирование захвата с табличкой ... .... ... ... .... ..
Связывание программ робота
..... .... ... ..
Упражнение : программирование в KRL
.. ...... ... ... ..
................. ... ... ...... ... ... ..
180
182
185
Соде Ж;lние
11 .1
11 .2
11 .3
Обзор
............... .... ....................................... ........... ..
Подготовка к запуску программы от ПЛК ..........
Настройка соединения с ПЛК (Cell . sгc) ........ .
индекс
........................................................................................................ ..
185
185
187
189
KUKA
KUKA
1С
а ~
HO(Ц~III ~cтe .... ы
1
Структура и функции системы робота KUКA
1.1
Обзор
оf>oта KUКA
в этом учебном разделе рассматриваются следующие элементы:
1.2
•
•
запуск робота ;
•
система управления роботом KR С4;
•
•
пульт KUКA smartPad;
•
безопасность на роботе .
механика робота KUКA;
программирование робота;
Запуск робота
Что такое робот?
Термин робот образован от славянского слова работа, который означает
тяжелый труд.
Официальное определение промышленного робота звучит следующим
образом: «робот - свободно программируемый , управляемый програм­
мой манипулятор» .
К роботу таюке относятся система управления и пульт управления , а так­
же их соединительные кабели и ПО .
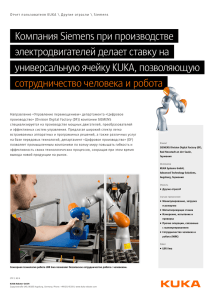
Рис. 1-1: Промышленный робот
1
Система управления (шкаф управления (V)KR С4)
2
3
Манипулятор (механика робота)
Пульт управления и программирования (KUКA smartPAD)
KUKA
KUKA
п
rpaMMIi оввние
обота 1
Все эа пределами системы промышлеННQГQ робота обозначается в ка
честве nер uферuйного оборудованuя:
1.3
•
инструменты (рабочие органы);
•
предохранительное приспособление;
•
ленты транспортеров ;
•
ДЭ1'-lики ;
•
машины ;
•
и Т. Д.
Механика робота KUКA
Что такое
Манипулятор - собственная механика робота. Он состоит из определен­
манипулятор?
ного количества ПОДВИЖНЫХ соединенных друг с дРУГОМ звеньев (осей) .
Речь идет кинематической цепочке.
АЗ
o
А1
(2)
-, /ft~, %y/ ''//. ''·
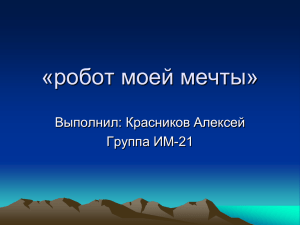
Рис. 1-2: Манипулятор
1
2
Манипулятор (механика робота)
3
СвобоДНЫЙ конец кинематической цепочки: фланец (FLANGE)
А1
Запуск кинематической цепочки : основание робота (ROBROOr)
Оси робота 1-6
А6
Перемещение отдельных осей выполняется посредством направленно­
го регулирования сервоДвигателеЙ . Они соединены через редукторы с
отдельными компонентами манипулятора.
8/191
KUKA
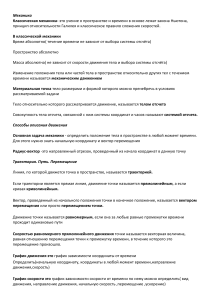
Рис. 1.з: Обзор компонентов механики робота
1
2
Станина
3
4
Балансир
Карусель
5
Манипулятор
Компенсатор веса
6
Рука
Компоненты механики робота преи мущественно изготовлены из алюми­
ниевого и стального литья , В отдельных случаях Т8юке применяются КОМ­
поненты из углеродного волокна .
Отдельные ОСИ пронумерованы сни зу (опора робота) вверх (фланец ро­
бота) :
Рис . 1-4: Степени свободы робота KUКA
KUKA
n
оrрамми
OB3H>le otioTa 1
Выдержка из технических данных манипуляторов И3 ассортимента про
дукции KUКA :
•
количество осей: от 4 (SCARA и роботы с параллелогра мм ным ме­
ханизмом) ДО 6 (стандартные вертикальные роботы с шарнирной ру­
кой) ;
•
радиус действия : от 0,35 м (KR 5 зсага) ДО 3,9 м (KR 120 RЗ900 ultra
К) ;
•
•
собственный вес: от 20 кг до 4700 кr;
точность: точность повторяемости 0,015--0,2 мм.
ЗОНЫ основных осей ОТ А1 до АЗ и Р~НОИ оси робота А5 ограничены ме­
ханическими концевыми упора м и с амортизаторами
На дополнительных осях можно установить отдельные концевые упоры
" ОПАСНО
При столкновении робота ИЛИ ОДНОЙ из ДОПОЛНИ
тельных осеи с каким-либо препятствием ИЛИ ИХ
столкновении с а м ортизаторо м робота на механическом концевом упо­
ре устроиства ограничения зоны оси существует риск повреждения ро­
бототехническои системы Перед повторным вводом
робототехнической с и стемы в эксплуатацию следует проконсультиро­
ваться со специалиста м и ко м пании KUКA Roboteг GmbH
Поврежден­
ный амортизатор необходимо нем едленно заменить новым
чем возобновлять эксплуатацию робота
прежде
При столкновении робота (до­
полнительной оси) с амортизатором СО скоростью . превышающеи 250
м м/с . робот (допол нительную ОСЬ) следует заменить. или же должен
быть выполнен их по вторный ваод а эксплуатацию специалистами ком­
пании KUКA Roboter GmbH
1.4
Система управления роботом (V)KR С4
Кто обеспе­
Механика робота приводится в движение серводаигателями , которыми
чивает переме­
управляет система управления (V)KR С4 .
щение?
1С
(1 и
кuии системы
f8 I(UКA
Рис. 1-5: Шкаф управления (V)KR С4
Свойства системы управления (V)KR С4
•
Система управления роботом (планирование траектории) : управле­
ние шестью осями робота , а также дополнительными внешними ося~
ми числом до двух .
Рис. 1-6: Регулирование осей (V)KR С4
•
Управление процессом ; встроенный программируемый ПЛК согласно
IEC61131.
•
Управление безопасностью.
•
Управление перемещением .
•
Возможности связи через системы шин (напр. , ProfiNet, Ethernet IP,
Iпtеrbus) :
программируемые системы управления (ПЛК) ;
дополнительные системы управления ;
датчики и исполнительные злементы .
•
ВО3МОЖJ-Iости связи по сети :
управляющий компьютер ;
дополнительные системы управления .
KUKA
KUKA
п ОГ амм\\
OeaHlle
обота 1
Рис. 1-7: Возможности связи (V)KR С4
1.5
Пульт управления KUКA smartPAD
Как управлять
Управление роботом КUКАосуществляется посредством ручного пульта
роботом KUКA?
управления - KUКA smartPAD.
Рис. 1-8
Отличительные особенности пульта KUКA smartPAD:
•
сенсорный экран (чувствительная к касаниям панель управления)
дnя ручного управления или управления с помощью встроенного сти
луса;
•
большой крупноформатный экран ;
•
•
восемь клавиш перемещения ;
кнопка вызова меню KUКA:
\ С
1.6
а 1'1
НЩI'II'I систем!;>
Обота KUКA
•
клавиши для управления технологическими пакетами;
•
клавиши для выполнения программы (останов/назад/вперед);
•
•
клавиша для вывода на экран клавиатуры ;
•
кнопка аварийного останова ;
•
пространственная мышь
•
(съемная);
•
разъем USB.
замочный выключатель для смены режима работы ;
Обзор smartPAD
Рис. 1-9
Поз .
Описа ние
1
Кнопка для отсоединения п ул ьта управления smartPAD.
2
Замок-выключатель ДЛЯ вызова менеджера соединений . Перекnючатель можно установить в другое положение только
при вставленном ключе.
С помощью менеджера соединений можно изменить режим
работы.
KUKA
KUKA
n or !lMMVI ОЭ(l"'1е робота'
Поз.
Описание
Устройство аварийного останова . Служит ДЛЯ останова робо-
3
та в опасных ситуациях. Устройство аварийного останова при
нажатии блокируется.
Пространственная мышь: Служит ДЛЯ перемещения робота
4
вручную.
Клавиши перемещения : служат ДЛЯ перемещения робота
5
вручную.
6
Кнопка ДЛЯ установки программной коррекции.
7
Кнопка ДnA установки ручной коррекции .
Кнопка вызова главного меню: ВЫВОДИТ пункты меню на экран
8
smartHMI.
Клавиши состояния. Клавиши состояния в ОСНОВНОМ служат
9
ДЛЯ настройки параметров из пакетав технологий . ИХ ФУНКЦИЯ
эависит от установленных пакетов технологий.
10
Клавиша пуска: клавишей пуска запускается программа .
11
Клавиша обратного пуска : Клавишей обратного пуска запускают программу в обратном направлении. Программа обрабатывается поэтапно.
Кnавиша СТОП: клавиша СТОП останавливает работающую
12
программу.
Кnавиша клавиатуры :
13
Эта клавиша ВblВОДИТ на экран клавиатуру . ОБЫЧНО клавиату-
ру не нужно вызывать отдельно: интерфейс smartHMI опреде ляет, когда требуется ввод данных с помощью клавиатуры , и
она автоматически появляется на экране.
1.7
Программирование робота
Посредством программирования робота обеспечивается возможность
автоматической и всегда регулярной обработки процедур и процессов
перемещениЙ . Для этого системе управления требуется большое коли­
чество информации :
=положение инструмента в пространстве ;
•
положение робота
•
вид перемещения;
•
скоростtJускорение;
•
сигнальная информация для условий ожидания , переходов, зависи­
мостей и т. д.
На каком языке
Язык программирования -
«говорит»
Пример программы:
KRL (KUКA Robot Language).
система управ­
ления?
РТР
Рl
РТ Р
Р 2 СОНТ
wлrr
РТР
Yel~ 1 00 '
PDAT l
Ve l - l00 , РОАТ2
FOR ХН 10
Р)
'Ражt
Уе l _ 100 % РОЛТ)
10 PoB1t1oo'
1С
а 1"
I1ЩI<I< ~C'Тe",ы
та KUКA
Как программи
Для программирования робота KUКA можно использовать различные
ровать робот
методы программирования:
KUКA?
•
интерактивное программирование С помощью метода обучения ;
Рис. 1·10: Программированме робота (; помощью пульта KUКA
smartPAD
•
автономное программмрование:
графическое интерактивное программмрование: моделирова­
ние процессов робота ;
Рис. 1-11: Моделирование с KUКA $im
текстовое програММИРОВ8ние: программирование с помощью
представления поверхности пульта smartPAD на управляющем
ПК верхнего уровня (также для диагностики , интерактивной на­
ладки запущенной программы) .
Рис. 1-12: Программирование робота с помощью KUКA OfficeLite
..
KUKA
KUKA
n ог эмми овамие
1.8
обота'
Система безопасности робота
Система робота всегда должна быть оснащена соответствующими пре­
дохранительными устройствами. К НИМ ОТНОСЯТСЯ , например, разъединя­
ющие защитные устройства (ограждения , дверцы и т . д.), КНОПКИ
аварийного останова, переключатели безопасности, ограничители об­
ласти ос ей и т. Д.
Пример: учебная
ячейка
Рис. 1-13: Учебная ячейка
1
Защитное ограждение
2
Механические концевые упоры или ограничители области осей 1,
2и3
3
Защитная дверца с дверным контактом ДЛЯ контроля функции за­
крывания
4
5
Кнопка аварийного останова (внешняя)
Кнопка аварийного останова , клавиша подтверждения, замочный
выключатель ДЛЯ вызова менеджера соединений
6
Встроенная система управления безопасностью (V)KR С4
" ОПАено
Использование системы робота без функциони
рующих предохранительных и защитных уст
ройств может привести к получению травм или материальному ущербу .
При демонтированных или дезактивированных предохранительных и за
щитных устройствах эксплуатировать систему робота запрещено .
Промышлен ный робот осна щен кнопкой аварийного останова на кер
Устроиство
Данную кно пку необходимо нажи мать в опасной или аварийной ситуа
а варииного
ции
останова
1 СТ
д И
НКЩ11о1 ClolcтeMbI
060Т8 KUКA
Реакция про мышленного робота при нажатии кнопки аварииного остано
ва
•
манипулятор и Дополнитепьные оси ( опция ) перекnючаются в режим
безопасного оста нова 1
Для продолжения работы следует деблокировать кнопку аварии наго ос­
танова посредством вращения и КВИП1ровать появившееся после этого
сообщение
1& ОСТОРОЖНО IЕсли от инструментов или других устроиств . соединенных с манипулятором , может исходить
опасность . необходимо интегрировать их в контур аварииного останова
на установке
Несоблюдение данного предупреждения может привести к гибели лю­
деи . тяжелым травмам или значительному материальному ущербу
Следует установить не менее одного внешнего устроиства аварииного
останова В этом случае устроиство аварииного останова доступно даже
при отключенном устро истве КСР
На каждои станции управления . которая может выполнить перемещение
Внешним
а варииныи
оста нов
робота или создать другую опасную ситуацию, должны быть у становле­
ны устроиства авариинога останова За это несет ответственность си с­
темныи интегратор
Следует установить не менее одного внешнего устроиствэ аварии наго
останова . В этом случае устроиство аварииного останова доступно даже
при отключенном устроистве КСР
Внешние устроиства авариинаго останова подключаются через интер ­
феис пользователя Внешние устройства аварииного останова не входят
в комплект поставки промышленного робота
С игнал защиты о ператора служит для блокировки разделитеЛЬНblХ за­
С истема з ащиты
о ператора
ЩИТНblХ приспособлениИ . таких как защитные двери Без этого сигнала
невозможен автоматическии режим работы
При потере сигнала во вре­
мя работы в автоматическом режиме ( например . при ОТКРblТИИ защитных
дверей ) манипулятор переключается в режим безопасного останова 1
В режимах тестирования « Вручную . пониженная скорость » ( Т1 ) и « Вруч ­
ную . высокая с корость » (Т2 ) система защиты оператора не деиствует
1
&
·
I
ОСТОРОЖНО После потери сигнала запрещается продолжать
. работу в автоматическом режиме только посредс
Т80М закрытия защитного приспособления: помимо этого требуется кви­
тирование Об зтом должен позаботиться системныи интегратор . Это
предотвращает возобновление работы в авто матическом режиме по
неосторожности . когда в опасной зоне находятся люди . например , при
закрытии защитнои двери
•
Квитирование должно быть организовано таким образом . чтобы
предварительно проводилась фактическая проверка опасной зоны
Квитирование , которое не позволяет этого (например . из-за того .
что оно автоматически следует за закрытием защитного устройс
тва ), является недопустимым
•
Несоблюдение данного предупреждения может привести к гибели
людеи . тяжелым травмам или значительному материальному у щер­
бу
KUKA
KUKA
п
rра ...... \IIрotlэ .... е РО6оп!. 1
Безопасным рабочим остан ов также МОЖНО выполнить с помощью входа
Безопасным
рабоч им останов
в пользовательс ком интерфеисе Это состояние будет поддерживаться
ДО тех пор . пока внешнии сигнал будет находиться в состоя нии FALSE
Как только внешним сигнал переключится в состояние TRUE. можно бу­
дет снова перемещать манипулятор Квитирование не требуется
Внешний безопасны и останов 1 и внешнии безопасным останов 2 MOryт
Внешнии
безо пасным
останов 1 и
внешнии
без опасным
останов 2
181191
быть выпол нены с ПОМОЩЬЮ входа в интерфеисе пользователя Это СО­
стояние будет поддерживатъся до те х п ор , пока внешним с игtiал будет
находиться в состоянии FALSE , Как ТОЛЬКО внешн ии СиГнал переключит­
ся в состояние ТRUE . МОЖНО будет с нова пере мещать манип улятор Квм ·
тирован ие не требуется
KUKA
2
Перемещение робота
2.1
Обзор
в ЭТОМ учебном разделе рассматриваются следующие элементы:
2.2
•
чтение и интерпретация сообщений ;
•
в ы бор и настройка режимов работы ;
•
переме щение осей робота по отдельности ;
•
перемещение робота 8 универсальной системе координат ;
•
перемещение робота в системе координат инструмента ;
•
перемещение робота в основной системе координат :
•
перемещение вручную со стационарным инструментом .
Чтение и интерпретация сообщений системы управления роботом
- --R - -
Обзор
•
сообщен""
.
о
И~ЦIIOI<ttаое ~ЮI
СООбщеция об OЖI',llaI1ИМ
:z
@ О
Рис. 2-1: Окно сообщений и счетчик сообщений
1
2
Окно Сообщений : показана текущее сообщение.
Счетчик сообщений : kоличество сообщений ДЛЯ каждorо ти п а со­
общениЙ .
с помощью окна сообщений система управления взаимодействует с опе­
ратором . Она поддерживает пять различных видов сообщений :
Обзор типов сообщений:
СИМ-
Тип
оол
Квитируемое сообщение
а •
Предназначены дnя представления состояний , при кото-
рых для дальнейшей обработки программы робота требуется подтверждение оператора (напр ., квитирование
аварийного останова) .
•
&
Квитируемые сообщения всегда приводят к тому , что робот останавливается или не запускается .
Сообщение о состоянии
•
Сообщения о состоянии показывают текущее состояние
системы управления (напр . , аварийный останов) .
• Сообщения о состоянии невозможно квитировать , пока
это состояние сохраняется .
KUKA
п
r амми OBiJHl1e
060ТЗ 1
СИМ-
Тип
вол
Информационное сообщение
Ф •
Информационные сообщения предоставляют информацию ДЛЯ надлежащего управления роботом (напр ., «Тре-
буется нажатие КНОПКИ запуска»).
• Информационные сообщения можно квитироваТЬ. Однако их квитирование необязательно, поскольку они не ос-
танавливают работу системы управления .
(
Сообщение об ожидании
• Сообщения об ожидании указывают на событие (состоя-
ние, сигнал или время) , которое ожидает система управ-
ления .
•
Сообщения об ожидании можно вручную прервать нажатием на экранную кнопку «Выполнить моделирование» .
1& осторожно IКоманду «Выполнить моделирование» можно ис
пользовать только в том случае , если столкнове-
ния или другие опасности исключены!
Диалоговое сообщение
. •
•
Диалоговые сообщения используются для прямой связи с
пользователем/запроса действия пользователя .
Показывается окно сообщений с экранными кнопками, которые содержат различные варианты ответа.
Ш Нажатием на кнопку ОК можно квитировать квитируемое сооб-
1. щение. Нажатием на кнопку Все ОК можно сразу квитировать
все квитируемые сообщения .
Влияние
Сообщения оказывают влияние на функциональность робота. Квитируе­
сообщений
мые сообщения всегда при водят к тому , что робот останавливается или
не запускается . Чтобы робот начал выполнять перемещения , сначала
следует квитировать сообщение.
Команда ОК (квитирование) требует от пользователя ознакомиться с
текстом сообщения .
гj'l Советы по обращению с сообщениями:
~ .внимательно прочитать;
. сначала прочитать старые сообщения . Новое сообщение мо­
жет быть следствием старого ;
•
не нажимать просто на кнопку «Все ОК» ;
•
особенно после запуска: просмотреть сообщения. Дпя этого вывес­
ти на экран все сообщения. Нажатие на окно сообщений раскроет
список сообщений.
Обращение с
Сообщения всегда показываются сдатой и временем, чтобы можно было
сообщениями
воспроизвести точное время события .
2 Пе
s
11.
мещеМl<е
оОота
т1
Рис. 2-2: Квитирование сообщений
Порядок действий для просмотра и квитирования сообщений:
1.
Коснуться окна сообщений , чтобы раскрыть список сообщений.
2.
Квитирование:
квитировать отдельные сообщения нажатием на кнопку ОК ;
альтернатива : квитировать все сообщения нажатием на кнопку
Все ок.
з.
Повторное касание верхнего сообщения или касание значка «Х» В ле­
вой части экрана снова закроет список сообщений.
2.3
Выбор и установка режима работы
Режимы работы
•
Т1 (вручную, пониженная скорость):
робота KUКA
ДЛЯ режима тестирования , программирования и обучения;
скорость в программ нам режиме: макс. 250 мм/с;
скорость в ручном режиме: макс. 250 мм/с.
•
Т2 (вручную , высокая скорость) :
ДЛЯ режи ма тестирования ;
скорость в программнам режиме соответственно запрограммиро­
ванной скорости;
ручной режим : невозможен .
•
AUT (автоматика):
ДЛЯ промышленны х роботов без системы управления верхнего
уровня;
скорость в программном режиме соответственно запрограммиро­
ванной скорости;
ручной режим : невозможен .
•
AUT ЕХТ (внешняя автоматика) :
для промышленны х роботов с системой у правления верхнего
уровня ( ПЛК);
скорость в программном режиме соответственно запрограммиро­
ванной скорости;
руч ной режим : невозможен .
Ручные режимы работы т1 и Т2
У казания по
Ручнои режим работы предназначен дnя работ по наладке Работы по
технике б езопас­
наладке - это все работы . которые должны быть проведены в робототех­
ности ДЛЯ
режимов работы
ническои системе. чтобы стала возможнои ее эксплуатация в автомати­
ческом режиме К н им относятся
•
обуч ение/програм мирование :
•
выполнение программ в пошаговам режиме (тестированиelпровер­
,а)
Новые или изме ненные программы сначала всегда должны быть испыта­
ны в режиме работы Вручную , пониженная с корость ( Т1) .
KUKA
KUKA
Режмм работы - Вруч ную , "онижен ная скорость (Т1)
•
система защиты оператора ( защитная дверца) неактивна
•
внутри пространства . ограниченного заЩИТНЫМИ приспособлениями
по ВОЗМОЖНОСТИ ДОЛЖНЫ отсутствовать ЛЮДИ
Если все же необходимо . чтобы внутри пространства . ограниченного
3ЭЩИТНЫМИ ПРИСПОСоблениями . находилось несКОЛЬКО человек , учи­
тывать следующие положения
все ЛЮДИ ДОЛЖНЫ иметь открытым ВИД на робототехническую сис­
тему :
все люди ДОЛЖНЫ ПОСТОЯННО пода.ерживать между собои визуanЬ­
ныи контакт :
•
оператор должен занять положение которое поэволяет просматривэn. опасные ЗОНЫ и тем самым предотвратить опасность
Режим работы - Вручную, высокая скорость (Т2 )
•
система защиты оператора (защитная дверца) неактивнэ .
•
данный режим работы разрешается использовать только в случае
если это требуется для проведения проверки с большем скоростью
чем в режиме «Вручную . пониженная скорость»
•
обучение в этом режиме работы не допускается
•
перед началом проверки оператор должен убедиться что устроиства
подтверждения функционируют
•
оператор должен занять положение вне опасном зоны :
внутри пространстеа. ограниченного защитными приспособлениями
•
должны отсутствовать люди
Режимы работы Автоматика и Внешняя автоматика
предохранительные ycтpo~cтвa и :)аЩИПiые приспособпения должны
•
иметься в наличии и полностью функционировать
•
все люди ДОЛJЮlы находиться вне пространства
ограниченнorо за·
Щктными приспособлениями .
Порядок
действий
Ш
I
1.
При переключении режима работы 80 время эксплуатации проис
ходит незамедлительное отключение приводов . Промышленный
роБОт останавливается при безопасном останове 2.
На пульте кер установить переключатель для вызова менеджера со·
единений в другое положение. На экране появится менеджер соеди ·
нениЙ .
2 Пе еl.!ещеНloIе
2.
обота
Выбрать режим работы.
1&1 liiJ liiI
11
з.
лиг
Установить переключатель для вызова менеджера соединений в ис­
ходное положение.
Выбранный режим работы появится в строке состояния пульта
smartPAD.
•
2.4
•
т1
Перемещение осей робота по отдельности
Описание:
перемещение по
осям
Рис. 2-3: Степени свободы робота KUКA
Перемещение осей робота
•
Переместить каждую ось по отдельности в положительном или отри­
•
Для этого используются клавиши перемещения или пространствен-
цательном направлении.
ная мышь KUКA smartPAD.
•
Скорость можно изменить (ручная коррекция : HOV).
•
•
Перемещение вручную возможно только в режиме работы Т1.
Кнопка подтверждения должна быть нажата.
KUKA
KUKA
Проrрз"'u"
11<1......
ПI
1
Приводы активир у ют нажатием на клавишу подтверждения . При нажатии
ПРИНЦ"П
кла виши п ерем еще НИА или пространственн о й мыши запускается систе­
ма реryлироваНИА осей робота и выполняется нужное перемещение .
Возможно как постоянное перемещение, так и инкрементальное переме­
щенив . Для этого выбрать инкрементальный размер в строке состояния .
На ручной режим работы оказывают действие следующие сообще­
ния:
Сообщение
Причина
С пособ устраненИЯ
« Активные
Возникло сообщение или состояние
Деблокировать кнопку аварийного
команды
(останова) , которое привело к 6по-
останова и/ или квитировать сооб-
зэблокиро-
кированию активных команД ( напр. ,
щения в окне сообщений. После
ваны»
нажата кнопка аварийнorо останова
нажатИЯ клавиши подтверждения
или ПрИ8QДЫ еще не ГОТОВЫ) .
приводы HeMeдneHHO станут
ДОСТУПНЫ .
«Програм-
Программный конечНЫЙ выключа-
Переместить указанную ось в прати-
мный конеч-
тель показанной оси (напр . , А5) был
воположном направлении .
ный
подведен в указанном направnении
выключа-
(. +. или «-. ).
тель А5 »
Режим работы
Указания по
технике безопас·
ности для
Ручное управлен ие робото м разрешено только в режиме рабоТbl Т 1
(вручну ю . по ниженная скорость). Скорость пере мещения вручную в ре­
жиме Т1 составляет макс . 250 м м/с_ Режим работы устанавливается с по­
мощью менеджера соединении
пе ремещения по
осям вруч ную
К нопка подтверждения
Чтобы п еремещать робот . кнопка подтверждения ДОЛЖl-lа быть нажата .
На пул ьте smartPAD размещено три кнопки подтверждения Каждая из
кнопок подтверждения и меет три положения
•
•
•
не н ажата .
среднее положение
нажата до отказа (экстре нное п оложение)
Программныи концевом выключатель
Перемещение робота при перемещении по осям вручную также ограни ­
чено положительным и отрицательным максимальными значениями про­
гра ммного концевorо выключателя
ILt ВНИМАНИЕ I Если в окне сообщении появится сообщение
I.'='-="-"-'=::"::"::C::::..J. • Выпол нить юстировку» . возможно пере меще­
ние за эти пределы Это может пр ивести к повреждению системы робо­
та
Порядок
действий:
выполнение
осевого переме­
щения
1.
Выбрать В качестве опции для клавиш перемещения Оси .
2 Пе емешение
2.
KUKA
та
Установить ручную коррекцию .
~
5
п
100 %
10 %
З.
Установить переключатель подтверждения в среднее положение и
удерживать перек.пючатель в нем .
Рядом с кпавишами перемещения показаны оси от А1 до А6 .
4.
Нажать клавишу перемещения «плюс» или «минус» для перемеще­
ния по оси в положительном или отрицательном направлении.
''I-,I'{.~~
Перемещение
""
робота в
Рис. 2-4: Устроиство свободного вращения
.~.
j
I1
,
ситуации без
ления
--.. -
.,....
аварии нои
системы управ­
~""·l_·.
.
KUKA
...
п ог амми ован е
060та
1
О писание
В аварийной ситуации или в сл у чае возникновения неисправности пере­
меще ние робота может быть осуществлено механически при помощи ус­
тройства свободного вращения Устройство свободного вращения также
может быть использовано для ПРИ80ДНЫХ двигателей ОСНОВНОЙ оси и ДnЯ
ПРИВDДНЫХ двигателем ручной ОСИ в зависимости от исполнения робота
Данное устроиство разрешается применять только 8 исключительных
случаях и в аварииных ситуациях. например , ДЛЯ освобожде ния люден
После использования устройства свобоДНОГО вращения при необходи ­
мости следует заменить соответствующие двигатели
1&
ОСТОРОЖНО
I
Во время эксплуата ции двигатели достигают вы
. соких температур . в связ и с чем возникает опас­
НОСТЬ пол~ен ия ожогов кожи Не касаться дв игателей l П ринять соот·
ветствующие меры безопасности . например . надеть защитные
перчатки
Порядок деиствии
1
8ыкnючить систему управления роботом и предохранить ее от несан·
кционированного вкnюче ния ( например . с помощью висячего замка ) .
2
С нять с двигателя защ итную крышку
з.
Установить устройство свободного вращения на соответствующии
дв игатель и пере местить ось в требуе мом направлени и
8 качестве опции можно заказать маркировку направлении со стрел ·
ка ми на двигателях . Следует преодолеть сопротивление механичес·
ко го тормоза двигателя . а также дополни тельные осевые нагрузки
Рис. 2-5: Порядок действий с устройством свободного вращения
Поз
Описан ие
1
Двигатель А2 с закрытои защитной крышкой
2
3
Дв игатель А2 со снятои защитной крышкои
Открыва ние защ итнои крышки на двигателе А2
2 Пе емещен\о\е OCiOT3
I ;',~
.\ ~ HMe
Установка устройства свободного вращения на двигатель
4
А2
5
Устройство свободного вращения
6
Табличка (опция) с описанием направления вращения
I.&.. ОСТОРОЖНО I Преду
п реждениеl
При перемещении оси посредством устроиства
свободного вращен ия существует риск повреждения тормоза двигате-
ля Это может привести к травмам персонала и материальному ущербу
по окончан и и использования устроиства свободного вращения необход и мо заменить соответствующии двигатель
Ш Дополнительные сведения приведены в инструкции по зксплуа
1. тации и монтажу робота
2.5
Системы координат относительно робота
При управлении, программировании и вводе промышленны х роботов в
экспл уатацию си стемы координат имеют большое значение . В системе
управления роботом заданы следующие системы координат:
•
WORLD: у ниверсальная систе м а координат ;
•
ROBROOT: система коорди нат основа ния робота ;
•
ВА$Е: основная система координат;
•
FLANGE: система координат фланца;
•
TOOL: система координат инструмента .
HOOl
Рис. 2-6: Системы координат на роботе KUКA
KUKA
KUKA
п
ОГ эмм.., OElaHl-\е
оБОТ8 1
Имя
Место
ИСПОЛЬЗОВание
Особенность
WORLD
СвобоДНО
Начало каордм-
В большинстве случаев
оп ределя-
н ат ДЛЯ
н аходится в основа н ии
емая
RQВRООТи
робота
BASE
ROBROO
Всегда в
Начало коорди -
т
осн ова-
нат робота
робота по отношению к
системе координат
нии
робота
BASE
Оп исы вает п ол ожение
WORLD
Свободно
Заготовки , п ри-
Описывает пол ожение
о п ределя-
сп особnения
базы п о отн оше н ию к
системе координат
емая
WORLD
FLANGE
TOQL
Всегда на
Начало каорди -
Начало координат -
флан це
нат ДЛЯ системы
середи н а флан ца
робота
координат TQQL
робота
СвоБОДНО
Инструме нты
Начало системы каор -
оп ределя-
динат TOOL обоз н ача-
емая
ется какТСР
( тер", центральная
точка инструмента)
2.6
Перемещение робота в ун и версальной системе координат
Перемещение в
универсальной
системе
координат
z
t4
$WORLD
Рис . 2-7: Принцип перемещения вручную в универсальной системе
координат
•
Инструмент робота может перемещаться соглас но направлениям ко­
ординат у н и версаль н ой системы координат.
П ри этом п еремещаются все оси робота .
•
Для этого ис п ол ьзуются клавиши п еремещения и л и пространствен ­
ная м ышь KUКA smar1PAD.
28/ 191
Ста
с
20 09 2012 Ве сия
Р1 KSS8 ROboter го< ralll' 1(; .I~
2 -IJ POF ·COL
'2 Пере ... ещен;\е ро6ота
• в стандартной установке универсальная система координат находится в основании робота .
•
Скорость можно изменить ( ручная коррекция : HOV).
•
Перемещение вручную возможно только в режиме работы Т1 .
•
Кнопка подтверждения должна быть нажата.
Пространственная мышь
•
Пространственная мышь обеспечивает интуиntвное перемещение
робота и является идеальным решением для перемещения вручну ю
в универсальной системе координат.
•
Принцип
перемещения
вручную в
Робот может перемещаться в системе координат двуМI' различны­
ми способами:
•
линейно (прямолинейно) вдоль направлений ориентации системы ко­
ординат: Х . У, Z;
универсальной
системе
Положение мыши и степени свободы можно изменять.
•
вращательно (поворачиваясь/наклоняясь) вокруг направлений ори­
ентации системы координат: угол д , В и С .
координат
Z+
У +
~_ x
Рис . 2-8: Система прямоугольных координат
При команде перемещения (напр ., нажатии на клавишу перемещения)
система управления сначала рассчитывает отрезок. Исходной точкой от­
резка является отсчетная точка инструмента (ТСР) . Направление отрез­
ка устанавливает универсальная система координат. Система
управления управляет всеми осями таким образом , что инстру мент про­
водится по зтому отрезку (перенос) или вращается вокруг него (поворот).
Преимущества использования универсальной системы координат:
•
перемещение робота всегда является предсказуемым ;
•
перемещения всегда однозначны, поскольку начало и направления
координат всегда известны ;
•
универсальная система координат всегда доступна для применения
на юстмрованном роботе ;
•
пространственная мышь обеспечивает интуитивное управление .
Использование пространственной мыши
•
С помощью пространственной мыши возможны все виды перемеще­
ний :
линейно : посредством нажатия и вытягивания пространственной
мыши;
KUKA
KUKA
n
rpa~t.,jt\
08a.. \4t' робота 1
•
уРис. 2-9: Пример: перемещение влево
вращательн о : посредством поворота и наклон а пространствен­
ной мыши ;
Рис. 2-10: Пример : вращательное перемещенив вокруг оси Z: угол А
•
соответственно положению человека и робота можно отрегупиро­
вать положение пространственной мыши .
.. .....
О·
РИ с. 2-11 :
Простра н стве нная MbIWb: 00 и 270·
~
270·
2 Пе
Выполнение
1.
меЩе+<ие
Установить положение кер посредством перемещения п олзунка (1).
линейных
перемещений
(унив.)
-...
2.
О '
..
ПcIIopoт
270 ·
Вы брать в качестве опции ДЛЯ пространственной мыши Унив ..
з.
тз
Установить ручную коррекцию .
•
100 %
10%
п
KUKA
KUKA
n
r~."'MlllpOBaHl<e роОота 1
4.
Установить переключатель подтверждения в среднее положение и
удерживать п ереключатель в н е м .
5. Переместить робот с помощью пространственной мыши в соответс­
твующем направлении.
6.
Также в качестве альтернативы м ожно использовать клавиши пере­
мещения .
2 Пе
2.7
... ещен~е
ООТЗ
Упра ж нение : управл е ние и перемеще ни е вручную
Цел ь упр аж­
После успешного завершения этого упражнения вы будете в состоянии
н е ни я
выполнить следующие операции :
•
включение и выключение системы управления роботом ,
•
•
основное управление роботом с ломощью пульта smartPad;
перемещение робота вручную по осям и в универсальной системе ко­
ординат с помощью клавиш перемещения и пространственной мыши ;
•
интерпретация и устранение причин первых простых системных со­
общениЙ .
Н еобходим ые
у словия
Чтобы успешно завершить это упражнение , требуется следующее:
•
участие в инструктаже по технике безопасности :
Ш
~
Ука зание l
Перед н ачалом упражнения следует принять участие в инструк
таже по технике безопасности и задокументи ровать зто !
•
теоретически е знания об общем управлении системой промышлен ­
•
теоретические знания об осевом перемещении вручную и перемеще­
нога робота KUКA ;
нии в универсальной системе координат .
П оста новка
з ада ч
Выполнить следующие задачи :
1.
Включить шкаф управления и дождаться фазы запуска .
2. Деблокировать и квитировать аварийный останов .
з.
Убедиться , что установлен режим работы Т 1 .
4.
Активировать осевое перемещение вручную .
5. Выполнить осевое перемещение робота с различными установками
ручной коррекци и (HOV) с помощью клавиш ручного перемещения и
пространствен ной м ыши .
6.
Определить область перемещения отдельных осей ; при этом учиты ­
вать имеющи еся п репятствия , напр ., стол или магазин с кубика м и , со
стационар н ым и н струментом ( проверка доступности ) .
7.
При достижении программного концевого выключателя следить за
окном сообщений .
8.
Подеести инструмент (захват) к базовому инструменту (черная металлическая головка ) из различных направлений .
9.
Повторить этот процесс в универсальной системе координат .
10. Вруч н ую положить кубик на стол .
11. Подвести захват к кубику . Выбрать нужную по мнению оператора сис­
тему координат.
12. Закрыть захват . Кубик не должен переместиться при закрывании за ­
хвата .
Что сл еду ет з нать с е йчас :
1. Как квитировать сообщения ?
2. Какая пиктограмма обозначает универсальную систему координат?
а)
Ь)
Ш
с)
d)
UJ
KUKA
KUKA
n
rpaM",~posa~~
ОТ8 1
З. Как назыеэется настройка скорости дnя перемещения вручную?
4. Какие режимы работы существуют?
2 Пе
2.8
мещение
бота
Перемещение робота в системе координат инструмента
Перемещение
вручную в
системе
координат
инструмента
.
$TOOL[1]
Рис. 2-12: Система координат Tool робота
•
При перемещении вручную в системе координат инструмента можно
перемещать робот соответственно направлениям координат заранее
откалиброванного инструмента .
Таким образом , система координат не яеляется неподвижной (ср . с
униеерсальной/основной системой координат) , а ведется роботом .
При этом перемещаются все требуемые оси робота . Выбор осей оп­
ределяется системой и зависит от перемещения .
Начало системы коо рдинат инструмента назыеается ТСР и соответс­
твует рабочей точке инструмента .
•
Для этого используются клавиши перемещения или пространственная мышь пульта KUКA smaгtPAD .
•
•
Для выбора доступны 16 различных систем координат инструмента.
•
Перемещение вручную возможно только в режиме работы п .
•
Кнопка подтверждения должна быть нажата .
Скорость можно изменить (ручная коррекция : HOV).
J.•
системы координат инструмента при пере
мещении вручную всегда соответствуют системе координат
фланца.
KUKA
KUKA
n
r амми оваКl'lе
обота 1
ПРИНЦ"П
перемещения
вручную в
системе
координат
инструмента
х
_....",1(:....._ _
Рис. 2-13: Система прЯМОУГQЛЬНЫХ координат
Робот может перемещаться в системе координат двумя различны­
ми способами:
•
линейно (прямолинейно) ВДОЛЬ направлений ориентации системы ко­
ординат: Х , У, Z:
•
вращательно (поворачиваясЬ/наклоняясь) вокруг направлений ори­
ентации системы координат: угол А , В и С.
Преимущества использования системы координат инструмента:
•
перемещение робота всегда является предсказуемым, пока известна
система координат инструмента;
•
возможно перемещение в направлении удара инструмента или дпя
ориентирования точки тер .
Под направлением удара инструмента понимают направление работы
или действия инструмента: направление выпуска клея из сопла для
нанесения клея, направление захвата при захвате детали и т. д.
Порядок
действий
361191
1.
8ьtбратъ Инструмент в качестве используемой системы координат .
2 Пе емещеНllе
2.
обота
инструмента.
R
тl
ВЬ.'6о:> мнструмеюа
[ЗJ
[ GrilJper
l
J
ВЬ:бор базы
[
Tab~
[2]
J
.k
lon... J
ВНewH. ",нстр.
З.
Уста н ови ть руч н ую коррекцию.
•
•
н
КоDPelЩМj' ~
100%
Pyo.;- ~
l -Л +
4.
10%
Уста новить переключатель п одтве ржде ния в среднее п оложение и
удерживать переключатель в не м.
KUKA
KUKA
п Q
aM"'~ ован.,е
060та 1
5.
Переместить робот с помощью клавиш перемещения.
/- --.
~""--
6.
Альтернатива: переместить робот с ПОМОЩЬЮ пространственной
мыши в соответствующем направлении.
2.9
Упражнени е: перемещение вручную в систе м е координат инструмента
Цель упра ж­
После успешного заверwения ЭТОГО упражнения вы будете в СОСТОЯНИИ
нения
выполнить следующие операци и :
•
перемещение робота вручную в системе координат инструмента с
помощью клавиш пере м ещения и пространственной мыши ;
•
перемещение робота вручную в направлении удара инструмента .
Н еобходимы е
Чтобы успешно завершить это упражнение , требуется следующее :
у сл ов ия
•
участие в инструктаже по технике безопасности ;
[IJ
~
•
Указани е!
Перед началом упражнен и я следует ПРИНЯТЬ участие в инструк
таже по технике безопасности и задокументировать зто !
теоретические знания о перемещении в системе координат инстру­
мента .
П оста но вка
Выполнить следующие задачи :
з ада ч
1. Деблокировать и квитировать аварийный останов .
2 Пе
2.
Убедиться . что установлен режим работы Т1 .
3.
Активировать систему координат инструмента.
4.
мещение
ота
Переместить робот в системе координат инструмента с различными
установками РY\lнои коррекции (HOV) с помощью клавиш ручного пе·
ремещения и пространственнои мыши . Проверить перемещение в
направлении удара и переориентацию вокруг точки тер .
5.
с помощью инструмента «3ахват» достать штифт из держателя .
KUKA
KUKA
п
(раМ ..... Оlil" .. е
2.10
18 '
Перемещение робота в основной системе координат
Перемещение 8
ОСНОВНОЙ
системе
координат
Рис. 2-14: Перемещение вручную в основной системе координат
Описание базы
•
Инструмент робота может перемещаться согласно направлениям ко­
ординат ОСНОВНОЙ системы координат. Основные системы координат
можно откалибровать индивидуально ; зачастую ОНИ ориектированы
ВДОЛЬ кромок ЭЭГОТОВОК, захватов ДЛЯ заготовок или палет. Благода­
ря этому возможно удобное перемещение вручную .
При этом переме ща ются все требуемые оси робота . Выбор осей оп­
ределяется системой и зависит от перемещения .
•
Для ЭТОГО используются клавиши перемещения или пространственная МЫШЬ KUКA smartPAD.
•
Для выбора доступны 32 основные системы координат.
•
Скорость можно изменить (ручная коррекция : HOV) .
•
Перемещение вручную возможно только в режиме работы Т1.
•
Кнопка подтверждения должна быть нажата .
Принц"п
перемещения
вручную в
основной
системе
координат
х
Рис. 2-15: Система прямоугольных координат
2 Пе емеше.,ие
ЬОlll
Робот может перемещаться в системе координат двумя различны
ми способами:
линейно (прямолинейно) ВДОЛЬ направлений ориентации системы ко­
•
ординат: Х , У , Z:
вращательно (поворачиваясь/наклоняясь) вокруг направлений ори-
•
ентации системы координат: угол А, В и С.
При команде перемещения (напр. , нажатии на клавишу перемещения)
система управления сначала рассчитывает отрезок. Исходной точкой от­
резка является отсчетная точка инструмента (ТСР). Направление отрез­
ка устанавливает универсальная система координат . Система
управления управляет всеми осями таким образом, что инструмент про­
водится по этому отрезку (перенос) или вращается вокруг него (поворот).
Преимущества использования основной системы координат:
•
перемещение робота всегда является предсказуемым , пока известна
•
таюке с помощью пространственной мыши возможно интуитивное уп­
основная система координат;
равление . Условием является правильное положение оператора по
отношению к роботу или основной системе координат.
УВЕДОМЛЕНИЕ
Если таюке установлена верная система коорди
нат инструмента, в основной системе координат
можно выполнить переориентацию вокруг точки ТСР.
Порядок
действий
1.
Выбрать в качестве опции для клавиш перемещения База.
KUKA
KUKA
n
ог 8ММ..,
ОIl3НИt' робот!! 1
2.
Выбрать ин струм ент и
5
R
D
ВЬ'бo:I базы
I Toble
(2)
~
Вb:top lpo'4ode
внешн. имcrp.
3.
Устан о вить ручную коррекцию .
•
п
100%
10%
4.
Установить переключатель подтверждения в среднее положение и
удерживать перекnючатель в нем .
42 I 191
2 Перемещен~е
5.
оота
Выполнить перемещение с ПОМОЩЬЮ клавиш перемещения в нужном
направлении .
6 . В качестве альтернативы можно выполнить перемещение С ПОМОЩЬЮ
пространственной мыши .
Реак ц ии
останова
Реакции останова промышленного робота происходят вследствие деИс·
твии Oflератора или в качестве реакции на процедуры контроля и сооб·
щения об ошибках Ниже в таблицах перечислены реакции останова в
эависимостм от установленнorо режима работы
KUKA
KUKA
n
р8 ...... "раез><>lО рОООТ8 1
Термин
Описание
Безопасный рабо-
Безопасный рабочий останов - контроль ПРОСТОЯ Он не останавли-
чии останов
вает перемещение самого робота а контролирует бездействие
осеи робота Если они перемещаются при безопасном рабочем
останове , срабатывает безопасныи останов STOP О
Безопасныи рабочии останов также можно выполнить сторонними
средствами
При срабатывании безопасного рабочего останова система управ-
ления роботом устанавливает выход IC магистральной wине Выход
также vстанавливается в ТОМ случае если к моменту срабатывания
остановлены не все ОСИ ЧТО приводит к срабатыванию безопасного
останова STOP О
Безопасныи оста-
ОстаНОВ . которым выполняется по команде системы управления
ное STOP О
безопасностью Система управления безопасностью мгновенно
отключает приводы и подачу питания к тормозам
Указание: этот останов обозначается е настоящеи документации в
качестве безопасного останова О
Безопасный оста-
Останов , который выполняет и контролирует система управления
нов STOP 1
безопасностью Процесс торможения выполняется компонентом
системы управления роботом, который не относится к безопас-
ности, и контролируется системой управления безопасностью Ka~
только манипулятор останавливается система управления безопасностью 011U1ючает приводы и подачу питания к тормозам
При срабатывании безопасного останова STOP 1 система управления робатом устанавливает выход к магистральнои шине
Беэопасный останов STOP 1 также можно выполнить сторонними
средствами
Указание: этот останов обозначается в настоящеи документации 8
качестве безопасного останова 1
Безопасным оста-
Останов , каторый выполняет и контролирует система управления
нов STOP 2
безопасностью Процесс торможения выполняется компонентом
системы управления роботом которыи не относится к безопасности. и контролируется системой управления безопасностью ПриВОДЫ остаются вкnюченными, а тормоза - разомкнутыми . Сразу
после остановки манипулятора срабатывает безопасны и рабочии
останов
При срабатывании безопасного останова STOP 2 система управления роботом устанавливает еыход к магистральнои шине
Безопасныи останов STOP 2 также можно выполнить сторонними
средствами
Указание: этот останов обозначается в настоящеи документации в
качестве безопасного останова 2
Категория оста-
Приводы незамeдnительно отключаются . после чего срабатывают
нова О
тормоза Манипvлятор и дополнительные оси (опция) останавлива-
ются вблизи траектории перемещения
Указание : данная категория останова обозначается в документа-
ции как STOP О
441191
Ста
с
200920128('
,L'~
P1KSS8Robo1er r
гаГ!'
'<',
1V2ru PDF·COl
,.
-. ,,'"
Категор .... я останова
2 Пере ... ещеl<l'Iе
ооота
Манипулятор и ДОГlOлнительные оси (опция ) останавл .... ваются
I
точно на траектории перемещения Через 1 секунду отключаются
ПРИ8ОДы и срабатывают тормоза
Указан ие : данная кзтerория останова обозначается в документац ........ Каl<: 5ТОР 1
Категор .... я оста-
ПРИ8ОДы не отключаются а тормоза не срабатывают Манипулятор
нова 2
и допanнительные ос .... (опция ) останавливаются со временем торможения согласно траектори
.... перемещения
Указа ние : данная категория останова обозначается в документации как STOP 2
-' .... ,
r
,<
А'-
Отпускание клавиши
STOP2
-
I
запуска
Нажатие клавиши оста-
SТOP2
нова
Выключение ПРИ8ОДов
SТOP'
Отмена входного сиг-
STOP2
нала деблокировки
перемещения
Отключение системы
SТOPO
управления роботом
t исчезновение напряжения)
Внутренняя ошибка в
STOP О или STOP 1
компоненте системы
управления
(зависит от причины ошибки)
не относя-
щемся к безопасности
Смена режима работы
Безопасныи останов 2
во время эксплуатации
Безопасныи оста-
Открытие защитнои
двери (защиты опера-
нов 1
тора)
Отпускание кнопки под-
Безопасныи оста·
нов 2
тверждения
Нажатие кнопки под-
Безопасныи оста·
тверждения до отказа
нов 1
-
или ошибка
ЗадеИСТВО8Зние аварии-
Безопасныи останов'
ного останова
Ошибка в системе
Безопасныи останов О
управления безопасностью или 8 периферии-
ном оборудовании
с
.... стемы управления
безопасностью
2.11
Упра ж нение : пере м е щение вручную в систе м е ко о рдинат з агото вки
Цел ь у праж­
После успешного завершения этого упражнения в ы будете в состоян .... и
нения
выполнить следующ
•
.... е операции :
перемещение робота вручную в системе координат заготовки с помо­
щью клавиш перемещения и пространственной мы ши ;
KUKA
KUKA
n ог эмми ование
обота
•
1
перемещение вручную вдоль предварительно оп ределенных кромок
заготовок
Необходимы е
у сл о ви я
Чтобы успешно завершить это упражнение , требуется следующее :
•
~астие в инструктаже п о технике безопасности ;
Ука за ни е!
1. П еред началом упражнения следует принять участи е в инструк
[IJ
таже по технике безопасности и задокументировать это !
•
теоретические знания о перемещении в системе координат заГQтое ·
ки .
П о ста н о в ка
Выполнить следующие задачи :
задач
1. Деблоки ровать и I<витировать аварийный останов .
2. Убедиться , что установлен режим работы Т1 .
З.
Активировать систему координат заготовки «Си н яя » .
4.
Зажать штифт в захвате и выбрать систему координат инструмента
« Штифт » .
5. П еремеСП1ТЬ робот в системе координат заготовки с различными yc~
тановками руч н ой коррекции (HOV) с помощью клавиш ручного пере~
ме щения и пространственной мыши .
6.
П ереместить штифт вдоль внешнего контура на рабочем столе .
2 Пе
2.12
мещенке
бота
Перемещение вручную со стационарным инструментом
Преимущества м
области приме­
нения
Некоторые производственные и обрабатывающие процессы требуют ,
чтобы робот обращался с заготовкой , а не с инструментом , Преиму­
щества заключается в том , что не требуется сначала укладывать деталь
для обработ ки : таким образом можно отказаться от зажимных п риспо­
соблениЙ . Это действительно для :
•
применения в области нанесения клея;
•
применения в области сварки ;
•
и т. д.
Рис. 2-16: Пример стационарного инструмента
УВЕдОМЛЕНИЕ
Чтобы успешно за п рограммировать такое прило
жение , следует откалибровать как внешнюю точ­
ку ТСР стационарного инструмента , так и заготовку .
Изменение
последователь­
ности переме­
щений при
стационарном
инструменте
Хотя в случае с инструментом речь идет о стационарном ( неподвижном )
предмете , у инструмента все же есть точка начала отсчета с соответс­
твующей системой координат. Точку начала отсчета называют внешней
точкой тер . Однако поскольку речь идет о неподвижной системе коор­
динат , данные управляются в качестве основной системы координат и
соответственно сохраняются в памяти в качестве базы .
В свою очередь (подвижная) заготовка сохраняется в памяти в качестве
инструмента . Таким образом возможно перемещение относительно
точки тер вдоль кромки заготовки .
УВЕдОМЛЕНИЕ
Следует учитывать , что при перемещении вруч ­
ную со стационарным инструментом п еремеще
ния выполняются относительно внешней точки ТСР .
KUKA
KUKA
п ограмми овакие
обота'
Порядок
.
•
действий ДЛЯ
" .... I ..
----
перемещенмя
,.
11
w " tIfj
' f .1
[.___ _ '~"i~
вручную со
стационарным
инструментом
[-
-- -~шl
--
J
b:J
Рис. 2·17: Выбор внеwней ТОЧКИ тер в меню опций
1. 8 окне выбора инструмента выбрать ведомую роботом заготовку.
2. Выбрать стационарный инструмент в окне выбора базы .
З.
4.
Выбрать значение Внеwний инструмент ДЛЯ режима IpoMode.
Установить в качестве опции ДЛЯ кпавиш перемещения/пространственной мыши значение «Инструмент»:
установить инструмент ДЛЯ перемещения в системе координат
заготовки;
установить базу ДЛЯ перемещения в системе координат внешнего
инструмента .
5.
6.
Установить ручную коррекцию.
Установить перекпючатель подтверждения в среднее положение и
удерживать перекnючатеЛl:. в нем.
7.
Выполнить перемещение с помощью кnавиш перемещения/пространственной мыши в нужном направлении.
Посредством выбора значения Виеши. ииетр. в окне опций Опции пере­
мещения вручную система управления перекnючится: теперь все пере­
мещения выполняются относительно внешней точки тер , а не ведомого
роботом инструмента .
2.13
У пра ж н е ни е: пере меще н ие вручную с о стационарным инст ру м енто м
Ц ель у праж­
После успешного завершения этого упражнения вы будете в состоянии
н е ния
выполнить следующие операции :
•
ручное перемещение ведомой роботом детали по отношению к ста­
ционарному инструменту .
Н еобходимы е
Чтобы успешно завершить это упражнение . требуется следующее :
усло в и я
•
теоретические знания об общем управлении системой промышлен­
нога работа KUКA ;
•
теоретические знания о перемещени и с внешним инструментом .
П оста н овка
1.
Установить систему координат инструмента « Табличка » .
задач
2.
Установить основную систему координат « Вне шний штифт » .
3.
Установить в меню опций перемещения вруч ную значение «Внешн .
инстр . » .
4.
Переместить табл и чку к внешнему штифту .
5.
Переместить и ориеНП1ровать табличку на внешнем штифте . Прове­
рить при этом различия между системами координат Tool и Base.
48/ 191
6.
Установить в меню опци й перемещения вручную значение «Фланец» .
7.
Переместить и ориентировать табличку на внешнем штифте .
Ста
с
200920 1 2Ве сия
P1KSS8Roboler r
ran mlcrlI'
1 ,'2ru PDF·COL
з Ввод
3
Ввод робота в эксплуатацию
3.1
Обзор
O~OTa в ЭКСГU1 атаulolЮ
в этом учебном разделе рассматриваются следующие элементы:
3.2
•
•
юстировка робота;
•
калибровка базы ;
•
•
отсоединение пульта smartPAD.
калибровка инструмента ;
калибровка стационарного инструмента ;
Принцип юстировки
Зачем нужна
Промышленный робот можно оптимально использовать только в том
юстировка?
случае, если он полностью и верно отъюстирован. Только в этом случае
обеспечивается полная точность прохождения точек и траектории и во­
обще возможны запрограммированные перемещения .
гjl При юстировке каждой оси робота присваивается отсчетное зна
L..ЖJ чение.
Полный процесс юстировки включает в себя юстировку каждой отде­
льной оси. С помощью технического вспомогательного средства (ЕМD
=
электронное наладочное устройство) каждой ОСИ в механическом нуле­
вом положении присваивается отсчетное значение (напр., 00). ПОСКОЛЬ­
ку таким образом механические и электрические положения осей
приводятся в соответствие, каждая ось получает однозначное значение
угла.
Положение юстировки является сходным для всех роботов. но все же не
одинаковым. Даже отдельные роботы одного типа могут иметь некото­
рые различия в точности положения .
KUKA
KUKA
n
r 8.м ... "роаа .. ,,!
та 1
Рис. 3-1: Положение юстмровочных патронов
Угловые значения механических нулевых положе ний (= отсчетные значе­
ния)
осъ
Поколение роботов
Дpyrмe типы роботов
Quantec
(нэпр .• серия 2000, KR 16
ИТ. д.)
А1
_20·
О'
А2
АЗ
_1200
+1100
_90·
+900
А4
О'
О'
А5
О'
О'
А6
О'
О'
Когда выпол­
в целом , робот всегда должен быть отъюстирован . Юстировку следует
няется
вы полнить в следующи х случаях:
юстировка?
•
при вводе в эксплуатацию ;
•
после проведения профилактическм х мероприятий на компонентах ,
которые задействованы в определении значения положения (напр. ,
двигатель с синус. -косинус . преобраэоеателем или RDC);
•
если оси робота перемещались без системы управления , напр ., с по­
МОЩЬЮ устройства свобоДНОГО вращения ;
•
после механических рем онтных работ/неисправностей снач ала сле­
дует деюстировать робот перед тем , ка к можно будет провести юсти­
ровку:
после за ме ны редуктора ;
после перем ещения до концевого упора со скоростью более 250
мм/с ;
после столкновения .
з 8804 робота 8 ЭКCnn 8тац ... ю
УВЕдОМЛЕНИЕ
Перед проведением проф илактических меропри
ятий целесообразно проверить текущую IQCтиров
Указания по
При неотъюстированны х осях робота ФУНКЦИИ робота значительно агра -
технике безопас-
ничены :
НОСТИ ДЛЯ
•
программный режим невозможен : невозможно обработать запрог-
юстировки
раммированные точки ;
•
линейное перемещени е вручную невозможно: перемещения в систе­
мах координат невозможны ;
•
программные концевые выключатели дезактивированы .
1&
I Предупрежден.е'
ВНИМАНИЕ При деюстированном роботе программные кон
цевые выключатели дезактивированы . Робот может ДОЙТИ до амортиза­
торов на концевых упорах , что может вызвать его п овреждение , а амор­
тизаторы придется заменить . Деюстироеанный робот по возможности
не перемещать или в максимально возможной степени уменьшить руч
ную коррекцию .
Выполнение
юстировки
Рис. 3-2: Использование EMD
в процессе юстировки определяется механическая нулевая точка оси .
При этом ось перемвщается до тех пор , п ока не будет достигн ута меха­
ническая нулевая точка. Это верно , когда измерительный штифт достиг
самой нижней точки в измерительн ой насечке . П ОЭТОМУ каждая ос ь осна­
щена юстировочным патроном и юстировочной меткой .
KUKA
KUKA
п
r
81.11.1 .. О!ЦIние rюooТ8 1
00 ' ''
0
llI1I
,. ,
r
0
~
,
:r=<!)
'~~"
~,
:<-
-
f-<;>
....
,1
. \
.:с.,
Рис. 3-3: Процесс юстировки ЕМО
1
Электронное наладочное
4
Измерительная насечка
5
Предварительное обозначе­
устройство (ЕМО)
2
Измерительный патрон
з
Измерительный uпифт
ние ЮСТИРОВки
3.3
Юстировка робота
Возможности
ДЛЯ юстировки
рОбота
Расчетный случай
нагрузки
..
мnlt НИ3Кi!Я ТОЧНОСТЬ
fH '( IIII),ne
Мr8I -..со.. тpe6088tIМ K'rO'OtOC'nI
~
~"'PГt lj1 ()&, ~ 1>
. "".. lТ.'.ц.'~_'
СТЭ IЩВp-rnый
Н8CI<OIIЫЮ расч8ТltЫХ . .'...
~
cnyчаев нагрузки
'-Пffll· tI. JL "' ~ ,
Стандартный
Устан овка
Пр~ерка
юстировки
юстировки
Юстировка с
Юстироека с
коррекцм." нагрузки
КОРР8ICЦиеio'! нагруэк и
Пер8ИЧН8"
IOСТИРОВК8
НаСЧЮЙК8
смещения
Юстировка
н аrpуз ки
"
с м еще ние",
Рис. 3-4: ВоЗМОЖНОСТИ юстировки
Для чего нужна
ИЗ-3а веса закрепленного на фланце инструмента на рОбот действует
настройка
постоянная нагрузка . Из-за обусловленной материалом эластичности
смещения?
компонентов и редукторов могут воэникнуть различия меж.цу положени-
3 8вод
06<)ТI;I 1;1 ЭКCn
аnЩIII()
ем ненагруженного и нагруженного робота . Эти различия в нескол ько ма­
лы х инкрементов влияют на точность работы робота .
Ав
А5
м
АЗ
А2
'1
рис. 3-5: Настройка смеЩения
Настрой ка смещения выполняется с нагрузкой . Разность по отношению
к первичной юстировке (без нагрузки) сохраняется в памяти .
Если робот работает с различными нагрузками , функция настройки сме­
щения должна быть выполненадля каждой нагрузки . Дл я захватов , рабо­
тающи х с тяжелыми деталями , настройка см ещения должна быть
выполнена для захвата без детали и ДЛЯ захвата с деталью .
УВЕДОМЛЕНИЕ
Маstеry.10gМаstеry.logФаЙл с данныии
смвщения юстировки
Определенные смещения сохраня ются в файле Mastery.10g . Этот
файл находится на жестком диске в папке С:\КRС\RОВОТЕR\LОG и со­
держит особые данные юстировки :
•
штамп времени (дата , вре мя);
•
•
ось ;
•
номер инструмента ;
•
значение см ещения (EпcoderDifference) в градусах .
•
При мер файла Mastery.log:
серийный номер робота ;
Dat e ; 22.03 . 11 Tirne; 10;07 ; 10
Axi. 1 Seria1no.; 86333 4 То01 Teaching for
(Encod er Di f fer ence ; -0 .001209)
Da te: 22. 03 . 11 Time; 10:08 :4 4
Axi.:1
SеrЦo.lnо.: 863334
То01 Te4ching f o r
Encoder Di ff erence; 0 . 00595 4 )
То01
Но
То01
No 5
5
с требуемой высокой точностью может работать только робот, отъюсти­
рованный с коррекцией нагрузки. Поэтому АЛя каждой нагрузки следует
настроить соответствующее смещение. Условие заlU1ючается в том , что
должна быть выполнена геометрическая калибровка инструмента и та­
ким образом присвоен номер и нструме нта .
Порядок
Первичную юстировку разрешается проводитъ
действий дпя
УВЕДОМЛЕНИЕ
перви'lНОЙ
сутствует. Не разрешается монтировать никаких инструментов и допол­
юстировки
нительных нагрузок.
1.
только в том случае , если нагрузка на робот от­
Прив ести робот в предъюстировочное положение .
KUKA
KUKA
п
r al.<l,I1' овзн",е
бота 1
Рис. 3-6: Примеры предъюстироеочного положения
2.
В главном меню выбрать ПУНКТ Ввод в эксплуатацию > Юстировка
> ЕМD > С корреkцией нагрузки> Первичная юстировка .
Откроется окно. Будут показаны все юстируемые оси . Выделена ось
с самым НИЗКИМ номером .
З.
Снять с ОСИ , выделенной в окне , защитную крышку измерительного
патрона. Повернутое УСТРОйСТВО ЕМD может СЛУЖИТЬ в качестве ОТ­
вертки . Навинтить устройство ЕМО на измерительный патрон .
Рис. 3-7: Прмвмнченное 1( измерительному патрону устройство ЕМО
4.
После этого подсоединить измерительный ПРОВОД к устройству ЕМD
и подключитъ его 1( разъему ХЗ2 на коробке выводов робота .
Рис. 3-8: Провод EMD. подключенный
3 В80.l1
ота 8 эк
атаuию
I.&. ВНИМАНИЕ I Всегда привинчивать устройство ЕМО к измери­
I'·'-"'-'="-'~"""'-~",,-J· тельному патрону без измерительного провода.
Только после этого подключить измерительный провод к устройству
ЕМD . Иначе возможно повреждение измерительного провода .
Точно так же при демонтаже устройства ЕМО сначала следует снять из­
мерительный провод с устройства ЕМО . Толы<о после этого снять УСТ­
ройство ЕМD с измерительного патрона .
после выполнения юстировки отсоединить измерительны й провод от
разъема ХЗ2 . В противном случае это может привести к помехам или
материальному ущербу.
5.
Нажать кнопку Юстировка .
6.
Нажать и удерживать нажатым переключатель подтверждения в
среднем п оложении ; нажать и удерживать нажатой клавишу запуска .
,"
,
"
L
•
II I
I
l
.~,
Рис. 3-9: Клавиша подтверждения и запуска
Когда устройство ЕМD пройдет самую нижнюю точку измерительной
насечки, положение юстировки будет достигнуто . Робот автомати­
чески остановится . Значения сохранятся в памяти . Ось в окне будет
затемнена .
7.
Отсоединить измерительный провод от устройства ЕМО. Затем снять
устройство ЕМО с измерительно го патрона и сн о ва установить за­
щитную крышку.
8.
Повторить шаги 2-5 для всех юстируемых осей .
9.
Закрыть окно .
10. Отсоединить измерительный провод от разъема ХЗ2.
Порядок
Настройка смещения выполняется с нагрузкой . Разность по отношению
действий для
к первичной юстировке сохраняется в памяти.
настройки
1.
Привести робот в предъюстировочное положение .
смещения
2.
В главном меню выбрать ПУНКТ Ввод в экспл. > Юстировка > EMD
> С коррекцией наrрузки > Настройка смещения.
З.
Ввести номер инструмента . Подтвердить клавишей Инстр. Ок.
Откроется окно . Показываются все оси , для которых инструмент еще
не был запрограммирован . Выделена ось с самым низким номером .
4.
Снять с оси , выделенной в окне , защитную крышку измерительного
патрона. Навинтить устройство ЕМD на измерительный патрон . Пос­
ле этого подсоединить измерительный провод к устройству ЕМО и
подключить его к разъему ХЗ2 на коробке выводов станины .
5.
Нажать кнопку Настройка .
6.
Нажать переключатель подтверждения и клавишу запуска .
Когда устройство ЕМD обнаружит самую нижнюю точку измеритель­
НОй насечки , положение юстировки достиrнуто . Робот автоматически
остановится . Отхроется окно . Отображается ОТI(J10нение для этой ОСИ
от первичной юстировки 8 градусах и инкрементах.
KUKA
KUKA
п
ра
......" 08a .. ~€'
та 1
7. Нажать ДЛЯ подтверждения КНОПКУ ОК . ОСЬ в окне будет затемнена .
8. Отсоединить измерительный ПРОВОД ОТ устройства ЕМО . Затем СНЯТЬ
устройство ЕМD с измерительного патрона и снова установить за­
щитную КРЫШКУ .
9 . Повторить шаги 3 - 7 ДЛЯ всех юстируемых осей .
10. Отсоединить измерительный ПРОВОД от разъема ХЗ2 .
11. Покинуть окно, нажав КНОПКУ Закрыть.
Порядок
Юстировка нагрузки СО смещением выполняется с нагрузкой. Рассчиты ­
действий
вается первичная юстировка .
проверки/
1. Привести робот в предъюстировочное положение.
устаНQВI(И
2.
В главном меню выбрать ПУНКТ Ввод в эксплуатацию> Юстировка
юстировки
> ЕМО > С коррекцией нагрузки> Юстировка нагрузки> Со сме­
нагрузки со
щением.
смещением
3. Ввести номер инструмента. Подтвердить клавишей Инстр. ок.
4.
Снять крышку с разъема ХЗ2 и подключить измерительный провод.
5.
Снять с оси , выделенной в окне , защитную крышку измерительного
патрона. (Повернутое устройство ЕМD может служить в качестве от­
вертки) .
6.
Навинтить ЕМО на измерительный патрон.
7.
Подключить измерительный провод к ЕМD. При этом выровнять
красную точку uпекера ОТliосительно паза в ЕМD .
8.
9.
Нажать кнопку Проверить .
Удерживать нажатым переключатель подтверждения и нажать кла­
вишу запуска .
10. При необходимости сохранить значения , нажав кнопку Сохранить .
Прежние значения юстировки при зтом будут удалены . Для восста­
новления утерянной первичной юстировки всегда сохранять значе­
ния.
11 . Отсоединить измерительный провод от устройства ЕМО . Затем снять
устройство ЕМD с измерительного патрона и снова установить за­
щитную крышку .
12. Повторить шаги 4-10 ДЛЯ всех юстируемых осей .
13. Закрыть окно .
14. Отсоединить измерительный провод от разъема Х32 .
3.4
Упражнение : юстиров ка роб ота
Цель упраж­
После успешного завершения этого упражнения вы будете в состоянии
нени я
выполнить следующие операции :
Н еобходим ые
у слови я
•
подвод к предъюстировочному положению ;
•
•
выбор нужного способа юстировки ;
•
юстировка всех осей с помощью устройства ЕМD .
обращение с электронным наладочным устройством ( ЕМО) ;
Чтобы успешно завершить зто упражнение , требуется следующее:
•
теоретические знания об общем ходе юстировки ;
з Ваод
•
та!l Э1<Cf1
атаuиlO
теоретическое знание предъюстировочного положения ;
1
Ось не в предъюстировочном положении
2
Ось в предъюстировочном положении
•
верное подключение устройства ЕМО к роботу ;
•
юстировка в меню ввода в эксплуатацию.
Постан о вка
Выполнить следующие задачи :
задач
1. Деюстировать все ОСИ робота .
2.
Переместить все оси робота по осям в предыостровочноеe положе­
ние .
З.
Выполнить на всех осях стандартную юстиров ку с по м ощью УСТрОЙС4
таа ЕМО .
4.
Вывести на экран фактическое положение по осям .
Что сл едует з нать с ей ч а с :
1. Для чего выполняется юстировка?
2. Указать угол механического нулевого положения для всех шести осей .
А1 :
А2 :
АЗ :
д4 :
А5 :
А6 :
З . Что следует учитывать в случае с деюстированным роботом?
4. Какое средство ДЛЯ юстировки предпочтительно использовать?
5. Какие опасности существуют при перемещении робота с ввинченным
устройством ЕМО (стрелочным индикатором)?
KUKA
KUKA
п
cr
aMM~ DВ(lние
3.5
обота 1
Нагрузки на роботе
РИС. 3-10: Нагрузки на роботе
1
Грузоподъемность
2
Дополнительная нагрузка на
3
Дополнительная негрузка на
ОСЬ 2
4
ОСЬ 3
3.6
Дополнительная нагрузка на
ОСЬ 1
Данные нагрузки инструмента
Что
Под данными нагрузки инструмента понимают все установленные на
представляют
фланец робота нагрузки. Они образуют дополнительно установленную
собой данные
на робот массу , которая должна перемещаться вместе с роботом .
нагрузки инстру-
К ВВОДИМЫМ значениям ОТНОСЯТСЯ масса, положение центра тяжести
мента?
(точка , в которой масса оказ ывает действие) и моменты инерции масс с
относящимися К НИ М главным осям инерции.
Данные полезной на грузки следует ввести в систему управления робо­
ТОМ и присвоить соответствующему инструменту_
Исключение: если данные полезной нагрузки уже были введены про­
грам м ой KUКA.LoadDataDetermination в систему управления роботом, то
вводить их вр учную больше не нужно.
Данные нагрузки инструмента можно взять из слеАУЮЩИХ источни­
ков:
•
опция программноro обес печ е ния KUКA . Load Detect (только п ол ез ные нагрузки );
•
сведения изготовителя;
•
расчет вручную ;
•
программы САD .
з BII(IJI
оБОТlI, Э~
(lТIlUИЮ
Действие
Введенные данные нагрузки оказывают воздействие на большое коли-
AaHHblX нагрузки
чество процессов системы управления . К ним относятся:
•
алгоритмы системы управления (расчет ускорения) ;
•
контроль скорости и ускорения;
•
контроль моментов ;
•
контроль возможности столкновения ;
•
контроль энергии;
•
и многое другое .
Поэтому крайне важно ввести верные данные нагрузки . Если робот вы­
полняет перемещения с верно установленными данными нагрузки , то :
Порядок
•
робот работает с высокой точностью и эффективностью ;
•
возможны операции перемещения с оптимальным временем такта;
•
повышавтся срок службы робота (благодаря малому износу) .
1.
В главн ом меню выбрать пункт Ввод 8 эксплуатацию > Калибровка
> Инструмент> Данные нагрузки инструмента.
действий
2.
В поле Nt инструмента ввести номер инструмента. Нажать кнопку
Продолжить для подтверждения .
З.
Ввести данные полезной нагрузки :
поле М : масса ;
поля Х , У , Z: положение центра тяжести по отношению к фланцу ;
поля д , В, С : ориентация главных осей инерции по отношению к
фланцу ;
поля JX, JY, JZ: моменты инерции масс.
(JX - инерция вокруг оси Х системы координат , которая посредс­
твом А , В и С повернута по отношению к фланцу . JY и JZ - соот­
ветственно , инерции вокруг осей У и Z).
4.
5.
3.7
Нажать кнопку Продолжить для подтверждения .
Нажать кнопку Сохранить .
Дополнительные наrрузки на робот
Дополни­
Дополнительные нагрузки - дополнительно установленные на станину.
тельные
балансир или манипулятор компоненты , например :
нагрузки на
робот
•
система энергоснабжения ;
•
•
кnапаны ;
•
запас материала .
система подачи материала ;
KUKA
KUKA
Рис . 3-11: Дополнительные нагрузки на робот
Данные дополнительной нагрузки ДОЛЖНЫ быть введены в систему уп­
равления роботом . К НУЖНЫМ даННЫМ относятся :
•
масса (т) в кг;
•
расстояние до центра тяжести массы относительно базовой системы
(Х, у и Z) в мм ;
•
орие нтация главных осей инерции относительно базовой системы (А.
В и С) в градусах ( О ) ;
•
2
моменты инерции массы вокруг осей инерции (Jx, Jy и Jz) в кrM .
Базовые системы значений Х , У , Z дI1Я каждой дополнительной нагрузки :
Базовая система
Нагрузка
Дополнительная нзгрузка А1
Дополнительная нагрузка А2
Дополнительная нзгрузка АЗ
Система координат ROBROOT
А1 = О·
Система координат ROBROOT
Ю. = -90·
Система координат F LANGE
А4 = 00 , А5
=0 0,
Ав = 0 0
Данные нагрузки можно взять из следующих источников :
•
опция програ ммного обеспече н ия KUКA . LoadDetect (только полез·
ные нагрузки) ;
•
сведения изготовителя;
•
расчет вручную ;
•
программы САО .
Воздействие
Указание данных н агрузки воздействует на перемещение робота раэлич·
ДОПОЛНИ­
ным образом:
rельныx
•
проектирование траекторий перемещения;
•
ускорения ;
•
время такта ;
нагрузок на
перемещение
робота
з Ввод
•
ofiOTa", зкспn апlЦШО
износ .
1&
ОСТОРОЖНО I ЭКl~плуатация робота с неправильными или не
=''=::':'=:-'''''':'':':''-J.
~.
деиствительными данными нагрузки представля­
ет опасность для физического здоровья и жизни персонала и/или может
привести к значительному материальному ущербу .
Порядок
действий
1. В главном меню выбрать пункr Ввод в эксплуатацию > Калибровка
> Данные дополнительной загрузки .
2.
Ввести номер оси , на КОТОРОЙ закреплена дополнительная нагрузка .
Нажать кнопку Продолжить для подтверждения.
3.
Ввести данные нагрузки. Нажать кнопку Продолжить для п одтверж­
дения .
4.
3.8
Нажать кнопку Сохранить.
Калибровка инструмента
Описание
Калибровка инструмента означает, что создается система координат , на­
чало которой находится в точке начала отсчета инструмента . Эту точку
начала отсчета называют ТСР (Тоо! Center Point), системой координат
является система координат TOOL.
Калибровка инструмента также включает в себя калибровку :
•
точки тер (начало системы координат):
•
ориентации системы координат .
Рис. 3-12: Примеры откалиброванных инструментов
Может быть сохранено до 16 систем координат
УВЕДОМЛЕНИЕ TOOL. (Переменная : TOOL_DATA[1-16}).
KUKA
KUKA
п
or aMM~ мание
обота 1
При калибровке сохраняется расстояние от системы координат TOOL (по
ос и Х , у и Z) ДО с истемы координ ат фл а нца , а также их п оворот QТНQCИ *
тельно друг друга (угол А. в и С) .
Рис. 3-13: ПРИНЦИП калибровки тер
Преимущества
Если была выполнена точная калибровка какого-либо инструмента, об­
СЛУЖИIiIЗЮЩИЙ И программирующий персонал нз прзктике получает еле
дующие преимущества :
•
улучшенное перемещение вручную :
возможность переориентации тер (напр. , головки инструмента) ;
+ ZwOR LD
~
• ..
••
•••
•••••••
+XWORLD
Рис. 3-14: Переориентация вокруг точки тер
перемещение в направлении удара инструмента;
621191
....
+УW ORLO
3 В80tl
оБОf8 8 3_
аrаuию
..
· ZwORLD
••
•
••
·
...
.
.....
•
••••
+~ RLD
+YWORLD
Рис. 3·15: Направление удара тер
•
использование при программировании перемещения ;
запрограммированная скорость перемещения сохраняется вдоль
трае ктории пере мещения у ТСР ;
Рис. 3·16: Программный режим с ТСР
кроме того, возможн а заданная ориентация вдоль трае ктори и пе·
ремещения .
Возможности
калибровки
инструмента
Калибровка инструмента состоит из 2 шагов :
KUKA
KUKA
п
ог
aM"'~ ОВдние робота 1
Шаг
Описание
Определение начала системы координат TOQL
На выбор предлагаются следующие метОДЫ:
1
• XYZ, 4
•
точки;
база отсчета XYZ.
Определение ориентации системы координат TOOL
На выбор предлагаются следующие методы:
2
•
•
Альтернатива
Аве, УНИ8. ;
Аве, 2 точкu.
Прямой ВВОД значений ДЛЯ расстояния до центра фланца
(Х , У, Z) и поворота (А, В , С) :
•
цuфровой ввод.
Калибровка тер
Точку тер калибруемого инструмента можно подвести к отсчетной точке
с П ОМОЩЬЮ
из 4 различных направлений . Точку начала отсчета можно выбрать про­
метода «XYZ, 4
ТОЧКИ»
извольно. Система управления рОботом рассчитывает точку тер , ИСХОДЯ
из различных положений фланца .
Гjl4 положения фланца , из которых выполняется ПОДВОД к отсчет­
~ ной точке , ДОЛЖНЫ находиться на достаточном расстоянии друг
от друга .
Порядок действий при методе «XYZ. 4 точки»:
1.
Выбрать последовательность меню Ввод в ЭkСПЛ. > Калибровка>
Инструмент> XVz, 4 точки.
2.
Присвоить номер и имя калибруемому инструменту. Нажать для под­
тверждения кнопку ОК.
IДля выбора доступны номера 1-16.
З.
Подвести точку ТСР к отсчетной точке. Нажать для подтверждения
кнопку ОК.
4.
Подвести точку ТСР котсчетной точкесдругого направления . Нажать
для подтверждения кнопку ОК .
з ВIЮД
о6оrn I:ЖCn
атаЦИIQ
Рис. 3·17: Метод XYZ 4 точки
5. Дважды повторить шаг 4.
6.
Нажать кнопку Сохранить .
Калибровка тср
При использовании базы отсчета XYZ калибровка нового инструмента
с помощью базы
выполняется с использованием уже откалиброванного инструмента .
отсчета XYZ
Система управления роБОТОМ сравнивает положения фланца и рассчи­
тывает ТСР нового инструмента .
Рис. 3-18
Порядок действий
1.
Условие: на установочном фланце установлен уже откаЛИброванный
инструмент и известны данные точки ТСР .
2.
В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Инструмент> База отсчета XYZ.
З.
Присвоить номер и имя н овому инструменту. Нажать кнопку Далее
ДЛЯ подтверждения.
4.
Ввести данные ТСР уже откалиброванного инструмента . Нажать
КНОпку Далее для п одтверждения .
KUKA
KUKA
n ог амми овамие
обота'
5. Подвести точку тер к отсчетной точке. Нажать кнопку Калибровка .
Нажать кнопку Далее длЯ подтверждения .
6. Отвести и СНЯТЬ инструмент. Установить новый инструмент.
7. Посредством тер нового инструмента ВЫПОЛНИТЬ ПОДВОД котечетной
точке. Нажать КНОПКУ Калибровка . Нажать КНОПКУ Далее для под­
тверждения.
8. Нажать КНОПКУ Сохранить. Данные сохранятся, и окно 3дкроется .
Или же нажать кнопку Данные нагрузки. Данные сохранятся, и откроет­
ся ОКНО, в котором можно ввести данные полезной нагрузки.
Метод ориен­
ОСИ системы координат TOOL устанавливаются параллеЛЬНQ осям сис­
тации и калиб­
темы координат WORLD. Посредством этого системе управления робо­
ровки Аве World
ТОМ сообщается ориентация системы координат TOOL.
Метод имеет 2 варианта:
•
50: системе управления роботом сообщается только направление
удара инструмента . Направлением удара является по умолчанию ось
х. Направление других осей задается системой , и оператор не может
определить их без дополнительных мер .
Область применения: например, дуговая сварка в инертном/актив­
ном газе, лазерная или гидравлическая резка .
•
6О: системе управления роботом сообщается направление всех 3
осей.
Область применения: например , для сварочных клещей , захвата или
сопел для нанесения клея .
Р ис . 3-19: Метод Аве у"ив.
Порядок действий для метода Аве World 5О
а.
Выбрать последовательность меню Ввод в экспл. > Калибровка
> Инструмент> АВС Worfd.
з В80Д
Ь.
обоrl 8 3КС"
aTalМlO
Ввести номер инструмента . Нажать дnя подтверждения кнопку
ОК .
с.
В поле 50/60 выбрать один 143 вариантов . Нажать дnя подтверж­
дения кнопку ОК .
d.
Если выбрано 50:
устан о вить +X TOOl параллельно -ZWORLD (+ХТСЮl = направление
удара инструмента) .
е.
Нажать для подтверждения кнопку ОК .
f.
Нажать Сохранить .
Калибровка
Системе управления роботом сообщаются оси системы КООрДинат TOOL
ориентации,
путем подвода инструмента к одной точке на оси Х и к одной точке в
метод (<дВС,2
точки»
плоскости ХУ .
Этот метод используется , если направления осей должны быть опреде­
лены особенно точно.
[IJ
Соблюдать следующий порядок действий , если направление
удара инструмента является направлением по умолчанию (= на­
правление Х) . Если направление удара изменено на У или Z, не­
обходимо соответственно изменить порядок действий .
Рис. 3-20: Метод АВС 2 точки
KUKA
KUKA
п
a"'M~ оа'''l'Iе
та 1
1. Условие заключается в том , чтобы точка тер уже была откалибровэ­
на методо м XYZ.
2. В главном меню выбрать ПУНКТ Ввод в эксплуатацию > Калибровка
> Инструмент> Аве, 2 ТОЧКИ .
З.
Ввести номер установленного инструмента . Нажать кнопку Далее
ДЛЯ подтверждения .
4 . Посредством тер подвести робот к любой отсчетной точке. Нажать
кнопку Калибровка . Нажать кнопку Далее ДЛЯ подтверждения .
5.
Переместить инструмент таким образом, чтобы атсчетная точка на
оси Х совпала с ТОЧКОЙ с отрицательным значением Х (Т. е . ПРОТИВ на­
правления удара инструмента). Нажать кнопку Калибровка. Нажать
кнопку Далее ДЛЯ подтверждения .
6.
Переместить инструмент таким образом , чтобы отсчетная точка на
плоскости ХУ совпала с точкой с положительным значением У. На­
жать кнопку Калибровка . Нажать кнопку Далее для подтверждения .
7. Нажать кнопку Сохранить . Данные сохранятся , и окно закроется .
Или же нажать кнопку Данные нагрузки . Данные сохраняются , и от­
крывается окно, в котором можно ввести данные полезной нагрузки .
УJ(азанмя по
технике безопас·
насти при
работе с
захватом в
учеб ном реж име
Рис. 3-21: Оласность защемле ния пальцев в учеб ном захвате
I.&. ОСТОРОЖНО I Преду преждение!
При обращен ии с системои захвата существует
опасность заще мления и отреза ния Лицо . у п равляющее захватом
должно убедиться ч то захват не может заще мить какую-либо часть те ­
ла
При зажиман ии деталеи ( куБ ИК . штифт) деиствовэть с особои осторож­
ностью
KUKA
Рис . 3-22: Зажать предметы в у чебном з ахвате
,
Зажи мание кубика
2
3
Зажатыи кубик
4
Зажатыи штифт
Зажимание штифта
в слу чае столкновения сработает предохранитель от ключения.
Отвод робота выполняется после срабатывания предохранителя откnю­
чения при столкновении Один участник зэдеиствует переключатель , 11
и достает любые части тела из робота . предохранителя отключения и за­
хвата Второи участник убеждается перед отводо м робота . что переме­
щение робота не представляет опасности для какого-либо лица
KUKA
п
r аМ"'1< ова><ие
обота'
Рис . 3-23: Переключатель ДЛЯ свободного перемещения предохра ­
нителя отключения
3.9
Упражнение : калибровка инструмента со штифтом
Цел ь уп раж­
После успе шного завершения этого упражнения вы будете е СОСТОЯНИИ
нения
ВЫПОЛНИТЬ спедующие операции :
•
калибровка инструмента методом «XYZ, 4 ТОЧКИ » и « две , уни в . » ;
•
активация откалиброванного инстру м ента :
•
перемещение в системе координат инструмента :
•
перемещение в направлен и и удара инструмента ;
•
переориентация инструмента ВQКРУГТQ4КИ те р .
Н еобходи мые
Чтобы успешно завершить это уп ражнение , требуется следующее :
усл о вия
•
теоретичес кие знания о различных методах калибровки рабочей точ­
ки инстру м ента , а именно метод «XYZ. 4 точк и ,, :
•
теоретические знания о различных методах калибровки рабочей точ·
ки инструмента . а именно метод «Аве , у нив . ,, :
з Ввод
обота в ЭКCnll аТ8ц:.но
теоретические знани я о да н ных нагрузки робота и их вводе .
•
1
Грузоподъемность
3
Дополн ительная нагрузка на
2
Дополнительная нагрузка на
4
Допол н итель н ая нагрузка на
ОСЬ 2
ось 3
ось 1
Постанов ка
Выполнить следующие задачи : калибровка штифта .
задач
1.
Откалибровать точку ТСР штифта с помощью метода "XYZ. 4 точки » .
В качестве головки н ачала отсчета использовать чер ную металли­
ческую головку . Достать верх ни й штифт и з магазина со штифтами и
зажать его в захвате . Использовать н о мер инструмента 2 и присвcr
ить ему имя Штифт1 . Допуски не должны прев ыwать 0,95 мм .
2.
Сохранить данные инструмента.
З.
Откалибровать ориентацию ин струме нта с помощью м етода « А ВС .
ун ив .• 50».
4.
Ввести данные нагрузки .
Да н ные нагрузки ДЛЯ захвата со штифто м в качестве инструмента
1'1122:
Масса :
М = 4 ,5 кr
Центр тяжести :
Х = 42 ,5 мм
у
=12.5 мм
Z=125MM
в
=О"
С
Ориентация :
А = О"
=00
Моменты инерции :
J x = 0 ,018 кгм 2
5.
J y = 0.025 кгм 2
Jz = 0,016 кгм 2
Сохр а нить да н ные инструмента и проверить переме щение со штиф­
том в системе коорд инат и нструмента .
Что следу ет зн ать по сле выполнения этого упражн е ния :
KUKA
KUKA
п
ОГ
!lMM~
08a .. ~e Ol'>oTa 1
1. Зачем нужна калибровка ведомого роботом инструмента ?
2. Что определяется методом «XYZ, 4 точки »?
3. Какие сп особы калибровки инстр у мента существуют?
з 880Д
З . 10
оБОТ8 8 Э~
8ТilUИЮ
Упражнение : калибровка инструмента с захватом , метод 2 To~eK
Цель упраж:·
После успешного завершен и я этого упражнения вы будете в состоянии
н е ния
выполнить следующие операции ;
калибровка инструмента с помощью метода . XYZ, 4 точки » и «Аве ,
•
2 точки » ;
Н еоб ходимы е
усло в ия
•
активация откалиброванно го инструмента ;
•
перемещение в системе координат инструмента ;
•
перемещение в направлении удара инструмента ;
•
переориентация инструмента sокруГТОчки тер .
Чтобы успешно завершить это упражнение, требуется следующее :
теоретические знания о различных методах калибровки рабочей точ·
•
ки инструмента , а именно метод 2 точек :
теоретические знания о данных нагрузки робота и их вводе .
•
Постан о в ка
з адач
Выпопнить следующие задач и : кал и бровка захвата с номером
1.
Откалибровать точ ку тер захвата с помощью метода . XYZ, 4 точки . ,
как показано на рисунке:
2.
Откалибровать ориентацию системы координат захвата с помощью
метода «Аве , 2 точки • .
3. Ввести данные нагрузки .
Данные нагрузки ДЛЯ захвата :
Захват KR16
Ма с с а:
М
=4 ,2 кг
Ц е нт р тяжести :
Х
=39,5 мм
У=10 , 5мм
Z= 120MM
Ори ента ция :
А
=00
в
=00
с = О·
М оме нты ин е рции :
J x = 0,01 кгм 2
J y = 0 ,02 кгм 2
Jz = 0,01 Kгr.i
Захват KR5 SIXX
Ма сса:
М = 2,0 кr
Ц е нтр тяжести :
Х
=23,0 мм
У
=..0,02 мм
Z
=61 мм
О р и е нтация :
А
=О·
в = О·
с = О·
J y =0,004 кrM 2
Jz = 0,003 кrм 2
Мом е нты инерции :
J x =0,002 кгм 2
4 . Сохранить данные инструмента и проеерить перемещение вручную с
захватом в системе координат инструмента .
Захват также можно откалибровать посредством цифрового ввода :
Захват KR16
Х
у
132,05
171 .30
Z
173,00
мм
мм
мм
А
В
С
45·
О·
180·
KUKA
KUKA
n
.~ ...... оВа ..... е
ОТ3 1
Захват KR5 sixx
Х
У
Z
А
В
С
12,0 мм
О""
77,0 мм
О·
О·
О·
,
r-c
t
"
. _о!
, :'.,- - f:
z
Рис _ 3-24: Учебный захват : положение ТОЧКИ тер
Что следует знать сейчас :
1. Ка кая пиктограмма обоэначает систему коорди н ат и нстру мента?
а)
Ь)
с)
d)
~
~
~
са
2. С кол ькими ин стру мента ми м ожет у пра вля ть си стема уп равления ( ма к­
с имальное кол ичество )?
З . Что озн ачает значение «-1. в данных нагрузки ин струме нта?
KUKA
3.11
Калибровка базы
Описание
КалuбровК8 базы означает создание системы координат в определен ном
месте окружения робота , исходя из универсальной системы координат .
цель ээкnючается в том , чтобы перемещения и запрограммированные
положения робота QТНОСИЛись к этой системе координат. Поэтом у опре­
деленные кромки захватов для заготовок, секций, палет или машин обра­
зуют целесообразные отсчетные точки ДЛЯ основной системы координат.
Калибровка базы выполняется в два этапа :
1. определение начала координат ;
2.
определение направлений координат .
РИС . 3-25: Калибровка базы
Преимущества
Выполнение калибровки базы предоставляет следующие преимущества:
•
перемещвние ВДОЛЬ кромки заготовки :
точка тер может перемещаться вдоль кромок рабочей поверхности
или заготовки вручн ую ;
KUKA
п
r
IJMM~ ОВдн.,е
060Т8 1
....
Рис. 3-26: Преимущества калибровки базы: направление перемеще­
ния
•
система относительных координат:
заученные точки ОТНОСЯТСЯ к выбранной системе координат;
Ва. .
Рис. 3-27: Преимущества калибровки базы: отношение к нужной
системе координат
•
коррекция/смещение системы координат:
возможно заучивание точек относительно базы. Если необходимо
сместИТЬ базу, например , из-за перемещения рабочей поверхности ,
точки смещаются вместе с ней , и новое обучение не требуется ;
з Ввод
OflOTB В экcnл аТilЩ1Ю
Рис . 3-28: Преимущества калибровки базы: смещение основной
системы координат
•
использование нескольких основных систем координат :
можно создать и использовать в зависимости от этапа выполнения
програм мы до 32 разных систем координат .
.. ,
а.
Рис. 3-29: Преимущества калибровки базы : использование несколь­
ких основных систем координат
Возможности
калибровки
базы
Для выбора доступны следующие методы калибровки базы :
Метод
Метод 3
точек
Описание
1.
2.
Определение начала координат.
3.
О п ределение положительного на п равления У (плос-
Определение положительного направления Х.
кость ХУ) .
KUKA
KUKA
п
rpa"'M~ ова>1ие
060та 1
Описание
Метод
Косвенный метод используется в случае, если подвод к
начальной точке базы неВQ3МQжен , например , так как она
расположена внутри заготовки или вне рабочего проКосвенНЫЙ меТОА
странства робота .
Выполняется подвод к 4 точкам базы, координаты которых ДОЛЖНЫ быть известны (данные САD). Система
управления роботом рассчитывает базу на основании
этих точек.
Цифра-
Прямой ВВОД значений ДЛЯ расстояния относительно ун и-
вой
версальной системы КООРДИНат (Х, У, Z) и поворота (А, В ,
ВВОД
С) .
Порядок
Калибровку базы можно выполнить лишь с зара
действий для
УВЕДОМЛЕНИЕ нее откалиброванным инструментом (точка тер
метода 3 точек
должна быть известна).
1.
В главном меню выбрать ПУНКТ ВВОД в эксплуатацию> Калибровка
> База> 3 точки .
2.
Присвоить номер и имя базе. Нажать кнопку Далее дпя подтвержде·
ния .
з.
Ввести номер инструмента, точка тер которого будет использовать·
ся дпя калибровки базы. Нажать кнопку Далее ДЛЯ подтверждения.
4.
Посредством тер выполнить подвод к началу системы координат но·
вой базы. Нажать программируемую клавишу Калибровка и кнопку
Да для подтверждения положения.
Рис. 3-30: Первый пункт: начало системы координат.
5.
е помощью тер выполнить подвод к точке на положительной оси Х
новой базы . Нажать кнопку Калибровка и кнопку Да дпя подтвержде­
ния положения .
Рис. 3-31: Вторая точка: направление Х
6.
е помощью тер на плоскости ХУ выполнить подвод к точке с поло­
жительным значением У. Нажать КНОЛКУ Калибровка и кнопку Да для
подтверждения положения.
з 8аод
те 11 экcn
8Т'8l1ИlO
Рис. 3·32 : Третья точка : плоскость ху
7,
8.
Нажать кнопку Сохранить.
Закрыть меню .
Ш
Три точки калибровки не должны лежать на одной прямой . Меж·
J. ду точками должен лежать минимальный угол (стандартная на·
3.12
стройка -
2,50).
Запрос текущего положения робота
Возможности
Текущее положение робота можно представить двумя различными спо­
индикации
собами :
положений
•
робота
По осям:
KUKA
KUKA
n
О' а~ми О'iI><ие
обота 1
SдХIS_АСТ={А1 ... ,А2 ... ,АЗ ... ,А4 ... ,А5 ... ,А6 ..• ,Е1 ... ,... ,Е6 ...}
Рис . 3-33: Осевое положение робота
Для каждой оси показывается текущий угол оси: ОН соответствует аб­
солютному з начению угла , ИСХОДА из положения юстировки .
•
Декартовый :
$POS_ACT=(X ... ,Y... ,Z ... ,A ... ,B ... ,C ... ,S ... ,T... ,E1 ... ,... }
Рис. 3-34: Положение в прямоугольныx координатах
Покззывается текущее положение текущей точки тер (системы коор­
динат инструмента) по отношению к выбранной в настоящий момент
ОСНОВНОЙ системе координат .
Если не выбрана никакая система координат инструмента, действует
система координат фланца .
Если не в ыбра на никакая основная система координат, действует
универсальная система координат .
З Ввод
оСоте 8 ЭКCn
IтаЦI1Ю
Положение в
П ри рассмотрении приведенного ниже рисунка сразу заметно , что робот
прямоуrольных
трижды принимает одинаковое положение . Однако индикация положе­
координатах с
ния в каждом из трех СЛY'"lаев указывает различные значения :
различныии
основными
систе мами
координат
.~ $B~SE[1]
•
••
··
TOOl
Рис. 3-35: Три положения робота -
одно положение робота!
Показывается положение системы координат ТооVточки ТСР в те куще й
основной системе координат:
•
для базы 1;
•
•
для базы 2;
для базы О : это соответствует системе координат основания робота
(в большинстве случаев также универсальной системе координат).
после выбора верной базы и верного инструмента индикация факти­
ческого положения в прямоугольны х координатах укажет разумные зна­
чения.
Порядок действий:
Запрос
положения
•
робота
В меню выбрать пункт Индикация > Фактическое положение . На ЭК­
ране появится фактическое положение в прямоугольной системе ко­
ординат .
•
Чтобы вывести на экран фактическое положение согласно осям , на­
жать кноп ку Соотв. ОСЯМ.
•
чтоБы вывести на экран фактическое положение в прямоугольной
системе координат, нажать кнопку В прямоугольных координатах.
3.13
Упражнение : калибровка базы стола , метод 3 точек
цель упраж­
После успешного завершения этого упражнения вы будете в состоянии
нения
выпол н ить следующие операции :
•
определение любой базы ;
•
•
кал и бровка б а зы ;
а ктива ция откал и брован ной базы для перем еще ния вручну ю ;
•
пере мещен и е в ос н ов ной си сте м е коорди нат.
KUKA
KUKA
п
or амми
ОSЗНl-1е робота 1
НеоБХОДИМЬlе
Чтобы успешно завершить это упражнение , требуется следующее :
условия
•
теоретические знания о способах калибровки базы . в частности , ме­
тода 3 точе к .
Постановка
Вы полнить следующие задачи :
задач
1.
Измерить СИ НЮЮ базу на столе с ПОМОЩЬЮ метода 3 точе к . Присвоить
б а зе N!!1 название С И НЯЯ . Использовать откалиброванный штифт 1
( номер и нструмента 2) в качестве калибровочного и нструмента .
2. Сохранить данные откалиброванной базы .
З.
Откалиброеать красную базу на столе с ПОМОЩЬЮ метода Зточек.
Присвоить б а зе N22 название К рас н ая . Использовать откалиброван ­
ный штифт 1 ( номер инстру мента 2) в качестве калибровочного инс­
трумента .
4 . Сохранить данные откалиброванной базы .
5. Переместить инструмент к начал у синей основной системы коорди ­
н ат и вывести на экран фактическое положение в прямоугольных ко
ординатах .
х
z
у
А
в
с
, •,
,,
,,,
•
~ :
""-""":.1'
,
,
Ри с . 3-37 : И з м е р ен и е базы на стол е
Чт о сл едует знать посл е вып олнения это го у п раж н ения:
1. Зачем нужна калибровка базы ?
2. Какая пиктограмма обозначает основную систем у координат ?
а)
Ь)
с)
d)
~
з . Какие способы калибровки базы существуют?
4 . С колькими основными системами может управлять система управле­
ния ( максимальное количество )?
з Ввод
5. Описать калибровку методом 3 точек
обота в ЭК
aтawlO
KUKA
киКА
Пporра.......
3.14
!I(lние
,а
1
Калибровка стационарного инструмента
Обзор
Калибровка стационарного инструмента состоит 1013 двух шагов :
1.
Определение расстояния между внешней ТОЧКОЙ тер стационарного
инструмента и началом универсальной системы координат.
2. Ориентация системы координат на внешней точке тер .
Рис. 3-38: Калибровка стационарного инструмента
Как показана на
(»> Р ис . 3-38 ) (1), выполняется управление внешней
точкой тер относительно $WORLD ( или $ROBROOT), т. е . как основная
система координат.
Описание калиб~
•
роеки
Для определения точки тер требуется уже откалиброванный управляемый роботом инструмент.
Рис. 3-39: Подвод 1( внешней тер
•
Для определения ориентации система координат фланца устанавли­
вается парanлельно новой системе координат. Имеется 2 варианта :
з Ввод
оБОТD 11 '~СПI'l атаЦl11О
50: системе управления роботом сообщается только направле­
ние удара стационарного инструмента , Направлением удара ЯВ­
ляется по умолчанию ось Х , Ориентация других осей задается
системой . и оператор не может определить ее без дополнитель­
ных мер .
60: системе управления роботом сообщается ориентация всех 3
осей .
Рис. 340: Параллельная ориентация систем координат
Порядок
1.
В главном меню выбрать пункт Ввод в эксплуатацию > Калибровка
> Стационарный инструмент > Инструмент.
действий
2.
Присвоить номер и имя стационарному инструменту , Нажать кнопку
Далее для подтверждения .
3.
Ввести номер используемого базового инструмента . Нажать кнопку
Далее для подтверждения .
4.
В поле 50f60 выбрать один из вариантов . Нажать кнопку Далве для
подтверждения .
5.
Посредством тер уже откалиброванного инструмента выполнить
подвод к тер стационарнorо инструмента . Нажать кнопку Калибров­
ка . Подтвердить положение , ответив Да на запрос.
6,
Если выбрано 50:
установить +X ВдSE параллельно -ZFLANGE.
(Т . е. выставить установочный фланец вертикально относительно на­
правления удара стационарного инструмента) .
Если выбрано 60 :
выставить установочный фланец таким образом , чтобы его оси были
параллельны осям стационарноro инструмента:
+XВдSE парanлельно -ZFLANGE;
(Т , в . выставить установочный фланец вертикально относительно
направления удара инструмента).
+YВдSE параллельна +Y FLANGE;
+ZВдSE п а раллельно +XFLANGE·
KUKA
KUKA
п
r эмми 08011«1('
оботг 1
7. Нажать кнопку Калибровка. Подтвердить положение , ответив Да на
запрос .
8.
3.15
Нажать КНОПКУ Сохранить.
Калибровка управляемой роботом заготовки
Обзор: непос·
редственная
калибровка
УВЕДОМЛЕНИЕ
Ниже речь пойдет лишь о непосредственной ка
либровке. Косвенная калибровка встречается
крайне редко и рассмотрена подробнее в Инструкции по эксплуатации и
программuрованuю системного программного обеспечения КИКА 8. 1.
Рис. 3-41: Калибровка заготовки посреДСТВОМ прямой калибровки
I Калибровка
Описание
Системе управления роботом сообщается начало координат и 2 другие
ТОЧКИ заготовки . Эти 3 точки однозначно определяют заготовку.
<D
Рис. 3-42
з Ввод
оБОПI е ЭIICn
aTa~1(I
Рис. 3-43: Калибровка заготовки: прямой метод
1.
Порядок
Выбрать последовательность меню Ввод в зксплуатацию > Калиб·
ров ка > Стационарный инструмент> Заготовка > Прямая калиб­
действий
ровка .
2.
При своить номер и имя заготовке . Нажать КНОПКУ Далее ДЛЯ под·
тверждвния .
з.
Ввести номер стационарного инструмента. Нажать кнопку Далее ДЛЯ
подтверждения.
4.
Переместить начало системы координат заготовки К тер стационар­
ного инструмента.
Нажать кнопку Калибровка и кнопку Да для подтверждения положе·
ния .
5.
Переместить точ ку на положительной оси Х системы координат заго·
товки к тер стационарного инструмента .
Нажать кнопку Калибровка и кнопку Да ДЛЯ подтверждения положе·
ния .
6.
Переместить точку . имеющую положительное значение на плоскости
ХУ системы координат заготовки , к тер стационарного инструмента .
Нажать кнопку Калибровка и кнопку Да ДЛЯ подтверждения положе­
ния .
7.
Ввести данные нагрузки заготовки и нажать кнопку Далее для под·
тверждения .
8.
3.16
Нажать !<Мопку Сохранить .
Упражнение : калибровка BHeWHero инструмента и ведомой роботом за·
готовки
Цель упраж­
после усп ешного завершения этого упражнения вы будете в состоянии
нения
выполнить следующие операции :
•
калибровка ста ц и он а рного инстру м ента ;
•
калибров ка подв ижных за готовок ;
KUKA
KUKA
•
перемещение вр~НУЮ с внешним инструментом .
Н е о бходимы е
Чтобы успешно завершить это упражнение , требуется следующее :
услов и я
•
теоретические знания о методах калибровки стационарных инстру­
ментов:
з ВIIОД
of'iОПI 11 Э~CnЛ 8Т8~Ю
теоретические знания о калибровке заготовки при стационарных инс­
•
трументах , в частности , прямой метод.
Z.OOL
П оста н о в ка
Выполнить следующие задачи : калибровка сопла и таблички .
з адач
1.
Для калибровки стационарного инструмента использовать откалиб­
рованный штифт 1 (номер инструмента 2) в качестве базового инс­
трумента . Задать ДЛЯ стационарного инструмента н о мер
ин стру м е нта 10 и имя С о пл о .
При каждой калибровке следить за сохранением данных.
2.
Откалибровать ведомую роботом заготовку . Задать н о ме р инстру­
ме нта 12 и имя Таблич ка .
Ввести данные нагрузки .
Данные нагрузки ДЛЯ захвата с табличкой :
Ма сса:
М=5 , 1кг
центр тя жести :
Х
=46 мм
у = 14 мм
Z=126MM
Ориентация :
А = О·
в
=О ·
Мом е нты инерции :
J x =0,019 кгм 2
J y = 0,026 кгм 2
Jz = 0,017 кгм 2
KUKA
KUKA
n or 3MMI-\ овзкие
обота 1
3.
После успешной калибровки активировать внешний инструмент дnя
перемещения вручную . Целесообразно использовать основную сие·
тему координат и систему координат инструмента и перемесп1ТЬ ра­
бот.
4. Подвести точку тер к началу ОСНОВНОЙ системы координат откалиб­
рованной заготовки и вывести на экран фактическое положение в
ПРЯМОУГQЛЬНЫХ координатах .
Фактическое положение :
х
у
z
А
в
с
Что следует знать сейчас :
1. Как 8ыполняется калибровка базы на заготовке , установленной на
фланце робота?
2. Как определяется точка тер внешнего ин струмента ?
З. Зачем требуется внешняя точка ТеР ?
4. Какие установки требуются , чтобы перемещать внешнюю ТОЧку тер в
направлении удара инструмента?
з Ввод
3.17
оБО'::I 11 3~СП
аТ::IШО!О
Отсоединение пульта smart.PAD
Описание
Пульт smartPAD можно откnючить при работающей системе управле­
•
ния роботом.
отсоединения
пульта smartPAD
Подключенный пульт smartPAD примет текущий режим работы систе­
•
мы управления.
Пульт smartPAD можно подсоединить в любой момент .
•
При подсоединении вариант (версия встроенного программного
•
обеспечения) пульта smartPAD не имеет значения , поскольку он об­
новляется автоматически.
Через 30 секунд после подсоединения пульта кнопка аварийного ос­
•
танова и перекnючатель подтверждения восстановят свою работос­
пособность.
Пользовательский интерфейс smartHMI автоматически снова появит­
•
ся на экране (это длится не более 15 секунд) .
Функция
отсоединения
пульта smartPAD
•
1.& ОСТОРОЖНО IЕсли пульт управления зтапРАО отсоединен , ус­
I '·='-="::'='-'='::":~· тановку невозможно отключить посредством кноп
ки аварийного останова на пульте smartPAD. Поэтому следует подклю­
чить внешнее устройство аварийного останова 1( системе у правления
роботом .
•
I
I
LЬ. ОСТОРОЖНО Пользователь должен позаботиться о том , чтобы
I '·='-=:.::.:..::.:....:=:::.:~· отсоединенные пульты управления зтапРАО
были незамедлительно удалены из установки и уложены на хра нение
вне поля зрения и досягаемости персонала , обслуживающего промыш­
ленный робот. Это необходимо для того, чтобы не перепутать действу­
ющие и недействующие устройства аварийного останова .
•
I&.
ОСТОРОЖНО
I
Если эт~ меры не будут приняты , возможен смер-
1·'= '-===-'-'=="'-'· тельныи исход, тяжелые телесные повреждения
или значительный материальный ущерб .
•
I.&. ОСТОРОЖНО IПри подключении пульта smartPAD к системе уп­
IL.=c::=.:c::c:....:O::"-':::.J. раеления роботом пользователь должен оста
ваться рядом с пультом не менее ЗА с , т . е . до восстановления работос­
пособности кнопки аварийного останова и перекnючателя подтвержде
ния. Та к можно избежать того, что дРу гой пользователь попытается вос­
пользоваться недействующим аварийным остановом в опасной ситуа
ции.
Порядок
действий дпя
отсоединения
пульта smar1PAD
Отсоединение:
1.
Для отсоединения нажать кнопку на пульте smartPAD.
В интерфейсе smartHMI появится сообщение и счетчик. Счетчик за­
пустится на 25 с. В течение этого времени можно отключить пульт
smartPAD от системы управления роботом .
KUKA
KUKA
п
or аММИРОВiI",,,е
Обота 1
Рис. 344: Кнопка отсоединения пульта smartPAD
При отключении пульта smaгtPAD без запуска
УВЕДОМЛЕНИЕ счеNика срабатывает аварийный останов. Ава­
рийный останов можно отменить только с помощью повторного подсо­
единения пульта smartPAD.
2.
Открыть двери распределительного шкафа (V)KR С4 .
З.
ОтсоеДИНИТЬ пульт smaгtPAO от системы управления роботом.
Рис. 3-45: Отсоединение smartPAD
1
2
Штекер во вставленном состоянии
Повернуть верхнюю черную деталь прибл . на 250 в направлении стрелки
3
4.
Потянуть штекер вниз
Закрыть двери распределительного шкафа (V)KR С4.
УВЕДОМЛЕНИЕ
По истечении времени счеNика в ТОМ случае,
если пулы smartPAD не был отсоединен, ничего
не проиэоЙдет. Можно нажимать КНОПКУ дNЯ отсоединения как УГОДНО
часто , чтобы снова вывести на экран счетчик .
Подсоединение:
1. Убедиться , что используется тот же вариант пульта smartPAD.
3 ВIIОП
ОТ8 iI :жcn
8ТЗUl1 Ю
2. Открыть двери распределительного шкафа {V)KR С4 .
3.
Подсоединить штекер пульта smar1PAD.
Соблюдать маркироеку на разъеме и штекере
УВЕдОМЛЕНИЕ пульта smartPAD!
Рис. 3-46: Подсоединение пульта smartPAD
Штекер в отсоединенном состоянии (соблюдать марки-
1
ровку)
2
Потянуть uпекер вверх. П ри смещении вверх верхняя черная деталь самостоятельно поеернется прибл. на 250.
Штекер самостоятельно защелкнется , т. е . маркировки
3
находятся друг над другом
1& ОСТОРОЖНО I При подключении пульта smar1PAD к системе уп­
I ',-'='-"~'-"'--'~"'''-'· равления роботом пользователь должен оста
ваться рядом с пультом не менее 30 с , т . е . до восстановления работос­
п особности кнопки аварийного остан ова и переключателя подтвержде
ния . Так можно избежать того , что другой пользователь попытается вос­
пользоваться недействующим аварийным останово м в опасной ситуа
ции .
4.
Закрыть двери распределительного шкафа (V)KR С4 .
KUKA
KUKA
941191
n ос амми ова>jие
бота 1
" Вwnoлнен~е n
4
Выполнение программы робота
4.1
Обзор
РЭIA ... ы
а
в этом учебном разделе рассматриваются следующие элементы:
4.2
•
выполнение перемещения инициализации ;
•
выбор и запуск програ мм робота.
Выполнение перемещения инициализации
Перемещение
Перемещение инициализации робота KUКA называется перемещением
SAK
SДк.
n
SAK означает точное совпадение эаписиМissiпg inline element
'emphasis'.Missing inline element 'emphasis' .. Совпадение означает «со­
ответствие», а таюке «совпадение вpeMeHHblxlnpocтpaHcтвeHHblx собы­
тий».
Перемещение SAK выполняется в следующих случаях:
•
выбор программы;
•
•
сброс программы ;
•
изменение в программе ;
•
выбор записи .
перемещение вручную во время работы программного режима ;
Q) .....~........
P1~......
.
Р2
0р.
____ -----..
; ....
..............
",_~,,,,,;
,,~_"";I"--,,,!!~~
?
.... -..........
РЗ
"
"
Р З " r.:;:-..
...,' ~
Рис. 4-1: Примеры причин для перемещения SAK
Примеры выполнения перемещения SAK:
1
Перемещение SAK в положение Home после выбора или сброса
программы .
2
Перемещение SAK после изменения команды перемещения :
удаление, обучение точки и т. д.
3
Перемещение $АК после выбора записи .
Причины для
Пе ремещение $АК требуется дnя обеспечения согласования текущего
перемещения
положения робота с координатами текущей точки в программе робота.
SAK
Планирование траектории возможно только после того, как текущее по­
ложение рОбота будет равно запрограммироеанному положению . Снача­
ла всегда следует привести точку тер на траекторию .
KUKA
KUKA
n
г
ёlMM.,
0831<I<e робота 1
•
Рис. 4-2: При мер перемещения SAK
1
Перемещение SAK в положение Home после выбора или сброса
программы.
4.3
Выбор и запуск программ робота
Выбор и запуск
Чтобы обработать прогрзмму робота , ее следУет выбрать . Программы
проrpамм
робота доступны в пользовательском интерфейсе в навигаторе . оБынаa
робота
программы перемещения хранятся в папках . Программа Cell (управляю­
щая программа ДЛЯ управления роботом со стороны ПЛК) всегда нахо­
ДИТСЯ в папке R1.
4 BblOOf1>!eHl'e про
•
а",мьо робота
ТI
IIВtNO (КRC; \J
RI
,.""""
..............'0-
~ '--.....
~
=-.........---" '--.........---" "--.. . .
Рис. 4-3: Навигатор
1
2
Навигатор : структура каталогов/накопителей
3
4
Выбранная програ мма
Навигатор: списки каталогов/файлов
Кнопка ДЛЯ выбора программы
Для запуска программы доступны как кн опки запуска в прямом направле~
нии ( t> ), так и запуска в обратном направлении ( .. ).
KUKA
KUKA
n or эмми о~амие-
обота 1
Рис. 4-4: Направления выполнения программы: вперед/назад
При обработке программы ДЛЯ управляемого программой перемещения
робота доступно несколько режимов выполнения программы:
Q]
GO
•
•
G1
св
Программа последовательно выполняется ДО ее конца.
В тестовом режиме кнопка запуска должна удерживаться нажатой.
Перемещение
•
•
В режиме выполнения Motion Step каждая команда перемещения обрабатывается отдельно .
После завершения перемещения следует повторно нажать КНОПКУ запуска.
Отдельный шаг
I Доступен только в группе пользователей
«Эксперты»!
•
•
В режиме Incremental Step обрабатывается строка за
строкой (вне зависимости от содержания строки).
После каждой строки следует повторно нажимать КНОПКУ
запуска .
4 Выпоп><е><ие n
Как выглядит
программа
робота?
аммы
ооота
,........................................................... ..,
~
1
DEF kuka rocks( )
................. .......... -._------------------------------ 1 -.'•
~
r-i --- iН-j ------··------·-------------------------·-·-------12\-1
._----... -.. __ ._---------------------------_. __ ... _--------- ~ -,
~._-------------------- - - -- -- - --------------------._.-----------~
РТР НОНЕ
: 3
,
> 'о{> ТР
0 :
Uel - 100 t DEFAUlT
Р1
Uel - 100 t
РDАТ1
Тоо1(1 )
5
РТР Р2
Ue l =< 100 t
РDАТ2
1001(1) 8ase[ О)
6
РТР
РЗ
Ue l -100 t
РDА 1 З
1001(1) Base[ О)
7
О"Т
1"
State - TRUE
Base[ О)
СОН1
•
•
.--_._._---_._--------------------------...........
llH
p~
РТР
НОНЕ
Ue l =2
~/ s
СРDА 1 1
Ue l - 100 \
1 001[1] Base[ О)
DE FAUlT
_------------~
~-ё---E ;a; --------------------------····----·---------------~-1
._----------------------...__ ._------------------------- ____ ~_'
Рис . 4--5: Структура программы робота
Видно только ДЛЯ группы пользователей «Эксперты»:
• «DEF названuв_программы()'1I всегда находится в начале про-
1
граммы;
• «END» указывает на конец программы .
«INI »
•
«INI»
•
• собственный текст программы с командами перемещения ,
•
строка
содержит вызовы стандартных параметров , ко-
торые требуются АЛя верного выполнения программы ;
2
строку
всегда следует выполнять первой.
командами ожидания/логическими командами и т. Д . ;
3
команда перемещения « ?ТР Ноте» часто п рименяется в на-
чале или в конце программы , поскольку она является одно-
значным и известным положением .
Состояние
СИМ8ОЛ
Цвет
Описание
программы
-
Серый
Ни одна из программ не выбрана .
Желтый
Указатель записи стоит в первой строке
I
R
1-;;-
выбранной программы .
Зеленый
R
Программа выбрана и отрабатывается.
KUKA
KUKA
п
r a",,,,~ oвa"~e РСЮQта 1
СИМВОЛ
Цвет
Описание
Красный
Выбранная и запущенная пporрЭММ8 ос­
тан овлена .
Черн ого
Указатель записи находится в кон це вы­
цвета
бранной программы .
Запуск
Порядок действий ДЛЯ запуска программ робота:
программы
1.
Выбрать про грам му .
Рис. 4-6: Выбор программы
2.
Устан овить скорость программы (коррекция программы , РОVЭ .
КоРРeIЩИl! програ~ы
сг
100%
100%
Рис. 4-7: Настройка POV
3.
Задействовать клавишу подтверждения .
Рис. 4-8: Кнопка подтверждения
4.
Нажать и удерживать кнопку запуска (+):
4 ВoInoлнение n
r а",,,,,,,
та
обрабатывается строка INI;
робот выполняет перемещение SAK.
Рис. 4-9: Направления выполнения программы: вперед/назад
I..&. ОСТОРОЖНО IПеремещение SAK выпол няется в качестве пере-
1'_-"''':::':::'::=-:--=::::::'::=-.1· мещения РТР от фактического положения к целе·
вому положению , если выбранная запись перемещений содержит
команду перемещения РТР . Если выбранная запись перемещений со·
держит LIN или CIRC, то п еремещение SAK выполняется в качестве пе­
ремещения LIN. Необходимо следить за перемещением , чтобы
избежать столкновений . При перемещении SAK ско рость авто м атичес­
ки снижается .
5.
после достижения целевого положения перемещение останавлива-
5
тl
ется .
Показывается инфор м ационное сообщение $АК досmuгнуm.
6.
Дальней ший порядок выполнения ( в зависимости от установленного
режима работы) :
т1 и Т2: продолжить выполнение программы нажатием на кнопку
запуска ;
AUT:
KUKA
KUKA
п ОГ эмми ование
060та 1
Затем запустить программу с импульсом нажатием на кнопку
Запуск.
В программе Се1l переключмть режим работы на ЕХТ и передать
ком анду перемещения от плк.
4.4
Упражнение : выполн е ни е про грамм роб ота
Цель упраж­
После успешного завершения этого упражнения вы будете в состоянии
не ни я
выполнить следующие операции :
•
выбор и отмена выбора программ ;
•
вы п олнен и е , останов и сброс програ м м в требуемых режимах работы
(тестирование выполнения программы ) ;
•
выпол н е ни е и п онимание выбора записи ;
•
вы п олнение перемещен и я SAK
Н ео бходимы е
Чтобы успешно завершить это упражнение , требуется следующее :
услов и я
•
теоретические знания об обращении с навигатором ;
•
знание выбора и отмены выбора программ ,
Постан о вка
з ада ч
1. Выбрать модуль A ir.
1&. ОСТОРОЖНО I Опасно !
Об я зател ьно соблюдать пра вила техники безо
пасности , предписанные инструктажем l
2. П ротести ров ать программу в различ н ых режи мах работы , как указано ниже :
Т1с100 % ;
Т2 с 10 % , 30 % , 50 %, 75 %, 100 %;
«Автоматика » с 100 %.
3. Протестировать п рограмму в режимах выполнения Go и « П еремеще­
ние » .
..
5 ()(jращенШ!! с
5
Обращение с файлами программы
5.1
Обзор
аиnами n
or аммы
в этом учебном разделе рассматриваются следующие элементы:
5.2
•
создание и обработка программных модулей :
•
архивирование и восстановление программ робота ;
•
обращение с протоколом .
Создание программных модулей
Программные
Программные модули всегда следует помещать в папку «Program • . Так·
модули в
же можно создать новую папку и сохранять программные модули В ней .
навигаторе
Модули обозначены символом с буквой «М» . Модуль можно дополнить
комментарием . Такой комментарий может содержать , например , краткое
описание функции программы .
- -
содерJQИllе: Prooram
..ЩС~
8ЕЯНD (КRC\)
ri
L
L
" ,,
.:J (ARCНlVE:\)
®
р,
\i)
PfJ·.
""' ...,
w 8octy_31S
0
Рис. 5·1: Модули в навигаторе
Свойства
программных
модулей
1
Главная папка для программ : «Program» .
2
Подпа пка для дру гих программ .
3
Программный модулЬ/модуль .
4
Комментарий к программному модулю .
Модуль всегда состоит из двух частей :
'"
KUKA
KUKA
n
ог амми Оllаliие
оБОт;) 1
ои МAINPROGRAМ О
'"
РТР НОМЕ VI!I- 1.()(ж OEfAIJLT
SRC
Рис. 5-2
исходный код: файл SRC содержит программный КОД.
•
DEF
НAINPROGRAМ
'"
НОНЕ
РТР
РТР
РТР
()
Vel - 100\ DEFADLT
POINTl Vel-lОО\ РОАТl TQOL[lJ BASE[2j
Р2 vel - l00 \ РDАТ2 ТOOL[l] 8АЗЕ[2]
'"'
СПИСОk данны:: файл DАТ содержит постоянные данные и коорди­
•
наты ТОЧКИ.
OEFDAT
МAINPROGRAН
()
DECL E6POS XPOINTl - (Х 900,
у
О,
Е6
Е2
О,
Е3
О,
Е4
DECL FDAT FPOINTl
О,
о
Е5
О,
О,
Z 800,
А
О,
В
О,
С
О,
S 6,
Т
27, El
О}
••
ENDDAT
Порядок
1.
Выделить папку в структуре папок, в которой следует создать новую
программу, например, папку Program.
действий для
создания
2.
Нажать програ ммируемую клавишу Новая .
программных
з.
Ввести имя новой програм мы и комментарий при необходимости,
после чего нажать кнопку ОК дЛЯ подтвер)!Щения .
модулей
5.3
Обработка программных модулей
Возможности
Как и в случае с распространенными файловыми системами, програм­
обработки
мные модули также можно обрабатывать в навигаторе KUКA smar1Pad.
К обработке относятся :
Порядок
•
дублирование/копирование;
•
удаление;
•
переименование.
1.
В структуре каталогов выделить пап ку, в которой находится нужный
файл.
действий для
удаления
2.
Выделить файл в списке .
программы
З.
Нажать программируемую клавишу Стереть.
5О
4.
ашение с
аилами n
аммь!
Подтвердить операцию , ответив Да на контрольный запрос . Модуль
будет удален.
1. робно » В навигаторе для каждого модуля п оказано по два файла
Ш
в группе пользователей « Эксперты » и настройке фильтра « Под
(файл SRC и DАТ) . В таком случае следует удалить оба файла .
Удале нны е файлы восстановить невозможно .
Порядок
1.
переименования
программ
...
В структуре каталогов выделить папку , в которой находится нужный
файл .
действий АЛЯ
2.
Выделить файл в списке .
з.
Выбрать программируему ю клавишу Обработать > Переименовать .
4.
Поверх имени файла написать новое имя файла и нажать кн оп ку ОК
ДЛЯ подтверждения.
Ш
в группе пользователей « Эксперты» и настройке фильтра «Под
1. рабно» В навигаторе для каждого модуля показано по два файла
(файл SRC и ОАТ) . В таком случае следует переименовать оба
файла .
Порядок
1.
действий АЛЯ
дублирования
программы
В структуре каталогов выделить папку , в которой находится нужный
файл .
2.
Выделить файл в списке .
з.
Нажать программируемую клавишу Дублировать .
4.
Ввести новое имя файла для модуля и подтвердить его нажатием на
кно п ку ОК .
Ш
~
в группе пользователей «Эксперты» и настройке фильтра «Под
рабно» в навигаторе ДЛЯ каждого модуля показано по два файла
(файл SRC и DАТ). В таком случае следует дублировать оба
файла .
5.4
Архивирование и восстановление программ робота
Возможности
архивирования
Каждый процесс архивирования создает ZI Р-файл на соответствующем
целевом носителе , который имеет то же имя , что и робот . В окнеДанные
о роботе можно изменить имя файла на Hy>КJ-toe .
Места хранения: доступно три различных места хранения :
•
USB (кер): USВ-накопитель на кер (smartPAD);
•
USB (шкаф) : USВ-накопитель на шкафу управления робота :
•
сеть : архивирование по сетевому пути .
Нужный сетевой путь следует задать в окне Данные о роботе .
1.
Ш
При каждом п роцессе архивирования помимо созданного на вы
бранном носителе ZIР-файла таюке сохраняется дополнитель­
ный архивный файл (INTERN.ZIP) на диске 0:\
Данные: для архивирован ия можно выбрать следующие файлы :
•
Все :
архивируются данные, необходимые для восстановления имеющей­
ся с и стемы .
•
ПРИkЛадные программы:
архивируются все КRL-модули (программы) пользователя и соот­
ветствующие системные файлы.
KUKA
KUKA
n
ог
!lММИ О!l<lние
обоrа 1
Системные данные:
•
арх ивируются технические данные.
данные журнала:
•
архивируются файлы журналов .
Диагностика KRC:
•
архивирование данных, которые передаются ДЛЯ анализа ошибок в
компанию KUКA RoboterGmbH. Создается папка с именем KRCDiag,
в которую МОЖНО записать ДО десяти ZIP-фаЙлов. Кроме этого , архи­
вирование выполняется в системе управления в папке
C:\KUКA\KRCDiag.
Восстановление
данных
& ОСТОРОЖНО I Обычно раЭ"решаетс_я загружать только архивы с
11'.'-=""""'-'-':':''':::'':::''::::.1· подходящем версиеи программногообеспечения .
При загрузке других архивов возможны перечисленные ниже последс­
твия :
сообщения об ошибках;
•
•
неработоспособность системы управления роботом ;
•
травмирование персонала и материальный ущерб.
При восстановлении для выбора доступны следующие пункты меню:
•
•
Все;
•
Системные данные.
Прикладные программы;
I.; I
В следующих случаях система выведет на экран сообщение об
...
•
ошибке :
если версия архивированных данных отличается от версии находя­
щихся в системе;
•
если версия технологического пакета несовместима с установлен­
ной версией.
Порядок
Разрешается использовать исключительно нако
действий ДЛЯ
УВЕДОМЛЕНИЕ
архивирования
rмx U5В-накопителей возможна потеря или изменение данных.
1.
питепь KUKAUSBData. При испопьзовании дру­
Выбрать последовательность меню Файл> Архивировать> use
(КСР) или use (шкаф) и выбрать нужный подпункт.
2 . Подтвердить операцию, ответив да на контрольный запрос.
После окончания архивирования появится окно сообщений.
Порядок
З.
Если на накопителе погас светодиод , накопитель можно отключить.
1.
Выбрать последовательность меню Файл> Восстановить и вы­
брать нужный подпункт меню.
действий ДЛЯ
восстановления
2.
Подтвердить операцию , ответив да на контрольный запрос. Файлы
будут восстановлены в системе управления роботом из архива. ПОС­
файла
ле окончания восстановления появляется соответствующее сообще­
ние.
З.
Если восстановление было вып олнено с носителя USB: отключить
U S В - н ос итель .
УВЕДОМЛЕНИЕ
При восстановлении с USВ-носителя : только
после того, как погаснет светодиод на U5В-носи­
теле , можно удалить носитель . Иначе возможно повреждение носите­
ля.
5
4.
5.5
ott ВЩ@НИ(' С фа~лв",i'I"
aMM~
Перезапустить систему управления роботом .
Воспроизведение изменений программ и состояний с помощью прото­
кола
Возмож.ности
Действия пользователя по управлению на пульте smartPAD а втомати ­
протоколиро­
чески протоколируются. Команда Протокол ВЫВОДит на экран протокол.
вания
2013~+24
2969 07:06:10'078
2013·07·2<1
.1968 07:06: 10'078 ФaКn IOМtНeIl {lU/SWoOiINE.DAT
2013-07-24
2967 07:06; 10'078
Ф..trl КI*tttМ /Rl/SR08COA..OAT
2OIH7-24
2966 07:06: 10'018 ~ IOМtI4fIl IlSМAOIINE.DAT
2013007-24
206 5 07:06:10'078
Ф,,"'ю
2964 ~~~;~:O
ф*, ~ 1'$CUSТDМ.OдT
2013007-23
2.963 11 : 2~: 20'Э94
~ с системсМО pu~ . . . . . .
......Н jJ$ОРТION.DAТ
~
2013-07-23
2t62 11 :2S:S0'317
Фa."I1I КRC;\IU\l8GN\t..dX yr..antll.
2(J1r67-23
2961 lI :2S:SO'286
ФаИn кя.С: \Rl\18GN\t.5I"С У./WМIи.
2960 201)-07-23
11 :2S:S0"286
""
dМt8 aImII ....
Фa.'v!КRС :\R!U6GN\t.1I(( ~.
....
Вpeмtl : 20IН.,-зо 10:41 :"'224
МОДуIl" : 5ylttm НOfOItP соо6щеНilA : 5001
Рис. 5-3: Протокол, вкладка Журнал
Поэ.
1
Описание
Вид события журнала
Отдельные типы и классы фильтров приведены на вкладке
Фильтр .
2
3
4
5
6
Номер события журнала
Дата и время соБыияя жур н ала
Краткое описание события журнала
Подробное описание выделенн ого события журнала
Индикация активного фильтра
KUKA
KUKA
n
r 8ММИ OBaKl<e
обота 1
Фильтр событи й
журнала
,,,
В О
8--0 ТИПЫ фи.лЬТРII
---8 ~
Boot
Ввод AIlHHbIX ПОIlЪ30ВlIтеле н
-El" Процесс
--- -8 ;EI "" Ввод в зкcnлyатilЦИIO
00
i -
СиcrеНII
В--[!]
КnilCCЫ фКnЬТРil
Уl03llн ие
Предупреждени е
--08 0ШИбе
LOQ
ФиsJ.тр 1
Рис. 54: Протокол, вкладка Фильтр
П ользование
ВЫВОД на экран и конфи гурирование может выполняться в любой группе
функцией
пользователей.
протокола
Вызов протокола:
•
В главном меню выбрать пункт Диагностика> Протокол> Индика­
ЦИЯ.
Конфиryрирование п ротокола:
1. В главно м меню выбрать пункт Диагностика> Протокол> Конфмry­
рация.
2.
Нажать кнопку ОК, чтобы сохранить конфигурацию и за крыть окно ,
5 Об ащен .. е с
а .. па ..... л
О'
8"''''*''
I VlI1!I~.w
:I"_ _
M
I п,р,~ 6rФtРI
!Г сoo6щt_
nocnt
ne~_ ~
Рис. 5-5: Окно Конфиryрация протокола
1
П ринять настройки фильтра дпя вывода и н форма ц ии . Если флажок не установлен , то при выводе информации фильтрация не
вып олняется .
2
3
Пусть к текстовом у файлу .
Данные протокола , которые были удалены из-за переполнения
буфера , в текстовом файле показываются с серым фоном .
KUKA
KUKA
n
3"''''1<
а .. »(О рооота 1
б Со~данИое и и~"'енение ~a
6
"'ми
r
аанных пе
меwеН>lИ
Создание и изменение запрограммированных переме­
щений
6.1
Обзор
в этом учебном разделе рассматриваются следующие эле м е нты :
•
создание перемещения с оптимизацией времени такта ;
•
создание перемещения по траектории ;
•
изменение команд перемещения ;
•
программирование перемещений с внешней точкой тер .
Создание новой команды перемещения
6.2
Программкро­
ванке переме­
щений робота
~•
•
" ,,
,,
,,
', Р9
рис. 6-1: Перемещение робота
Если требуется запрограммировать перемещение робота , возникает
много вопросов:
Вопрос
Решение
Кnючевое
слово
Как робот отмечает дnя себя
Текущее положение инструмента в про-
свои положения ?
странстве сохраняется в памяти ( положение
робота согласно установленному инстру-
POS
E6POS
менту и базе) .
Откуда робот знает, l<aK он
Посредством Уl<азания вида перемещения :
должен перемещаться ?
от точки к точке , линейно или по KPYry.
Насколько быстро переме-
Скорость между двумя точками и ускорение
щается робот?
указываются при программировании .
Должен ли робот останавл и-
Чтобы сэкономить тактовое время , можно
ваться в каждой точке ?
также выполнить сглаживание точек; в этом
РТР
LIN
CIRC
случае точный останов не выполняется .
Ста
с ~
)92012
0'[
Vel.
Асс .
CONT
KUKA
KUKA
n
r амм", ОВ8liие
Обота 1
Решение
Ключевое
Какую ориентацию примет
Для каждого пере мещения можно отдельно
ORUVPE
инструмент при достижении
установить контроль ориентации.
Вопрос
слово
какой-либо точки?
Контроль
Определяет ли робот пре-
Нет, робот ТОЧНО следует п о запрограммиро-
пятетВИЯ?
ваННОЙ траектории. Ответственность за
возможное-
отсутствие столкновений лежит на програм -
ти СТQЛКНQаения
мисте .
Однако падцерживается контроль возможности столкновения ДЛЯ защиты м ашины.
Эту информацию следует передать при программировании перемеще­
ний робота в режиме обучения . Для этого применяются встроенные фор­
муляры , в которые можно удобно ввести эту информацию .
4
Р ТР Р1
Ir----l.
•
Р ТР Р2
6
7
РТР РЗ
Uel - 100 % РОАТ1 Тооl[1] Base[O]
Uel - 100 2: РDАТ2 Тоо1[11 BasefOl
","' !. . ~ ~J ~ ! (о';! vel-G% I pOAТ4 I ~J j
OUT 1"
Ue1=100 \ РDАТЗ Тоо1[1] 8ase[O]
State"'TRUE СОНТ
Ри с. 6-2: Встроенный формуляр для программирован ия п еремеще­
ния
ВИДЫ переме­
Для проrpам мирования команд перемещения доступны различные виды
щений
перемещениЙ . В зависимости от требований к рабочему процессу робота
можно запрограммировать следующие перемещения :
•
осевые перем ещения (РТР : от точки k точке) ;
•
перем ещения по траектории: LIN (линейное) и CIRC (круговое) ;
•
SPLINE: Spline -
это перемещение , особенно пригодное для слож­
ных , изогнутых траекторий . Такие траектории можно также создать с
помощью перемещений LIN и CIRC . однако по сравнению с ними пе­
рем ещение Spline обладает определенными преимуществам и.
Ш
1.
Перемещения Spline не рассматриваются в настоящей учебной
докум ентации. Более подробная информ ация приведена в
Инструкции по эксnnуатации и nрограммированию системного
nрограммного обеспе чения КИКА 8.2.
KUKA
Создание перемещений с оптимизацией времени такта (осевое переме­
6.3
щение)
Вид переме·
щения РТР
Вид перемещения
РI
•
"'"
Значение
Пример использования
Point-To-Point: ОТ ТОЧКИ к
Точечные приложения ,
точке
напр. :
о
•
Перемещение по осям :
о
точечная сварка ;
робот про ВОДИТ точку
о
транспортировка ;
о
измерение , ко нтроль .
тер ВДОЛЬ самом быст-
р2
рой траектории к целеВОЙ точке . Самой
Вс помогательные положе-
быстрой траекторией,
ния :
как п равило , не является
кратчайшая траектория ,
т. е . не прямая . Так как
оси робота совершают
о
промежуточные точки ;
о
свободные ТОЧКИ в ПРОстранстве .
вращательное переме-
щение , криволинейные
траектории могут выпол-
няться быстрее , чем п рямые .
о
ТочнЫЙ ход перемещения непредсказуем .
о
Ведущей ОСЬЮ обознача-
ется ОСЬ , которой требу-
ется больше всего
времени для достижения
целевой точки .
о
SYNCHRO РТР : все оси
запускаются одновременно и также синхронно
подходят к останову.
о
П ервым перемещением
в программе должно
быть перемещение Р Т Р ,
поскольку толь ко в нем
оцениваются состояние
и поворот.
Synchro РТР
Ведущей осью обозначается ось, которой требуется бол ьше всего вре­
мени ДЛЯ достижения целевой точки. При этом учитывается заданная во
встроенном формуляре скорость .
KUKA
n
ог aMM~ OBaH~e
бота 1
Скорость ОДИНОЧНОЙ СХ;И V
Напр . ось 2: ведущая ось
V MaK . . _-------------- ".
- ---.
СОlЛэсова н а
согласована
P1.•~______~____~____~ ~ ~P~
2 __
~
Ускорен и е
,
~
Время!
П остояннаяТормажение
Рис . 6-3: Synchro РТР
Состояние и
поворот
Состояние и поворот служат дпя тorо , чтобы задать однозначное осевое
положение из нескольки х возможных осевых положений ДЛЯ того же по
пожения точки тер .
Рис. 6-4: Различные положения осей из-за рэзличны1x значений
StatU$ " Turn
Система управления учитывает прorраммируем ые значения СОСТОЯНИЯ и
п оворота ТОЛЬКО ДЛЯ перемещений РТР. Пе ремещения ер ИГНОРИРУЮТ­
ся . Поэтому первая команда перемещения в программе KRL должна
быть полной командой РТР типа POS или E6POS , чтобы было определе­
но однозначное положение ВЫХОДОВ (или полной командой РТР типа
AXIS или E6AXIS).
tI СО3l1зние и изменеиие JЗП о
мм""
ванных пе емеЩ('нии
DEFDAT МA INfROGRAМ О
DEC L РОЭ XPOINTI - IX 900. у О . Z 800. А О. В О . с О,
DECL FDAT FPO INTl ._
s 6. Т 21 }
ENDDDAT
Сглаживание
Р1
z
г---
/
/ I
/
I
/
/
/
/
/
/
/
/
/
- - - - - - - -(
/
I
I
I
----------г----- )
/
/
/
/
/
Р3
/
/
х
Рис. 6-5: Сглаживание точки
Для ускорения перемещения система управления способна выполнить
сглаживание с помощью команд с обозначением CONT. Сглаживание оз­
начает , что подвод к координатам точки выполняется неточно . Траекто­
рия контура точ ного останова покидается заранее . Точка ТСР
проводится вдоль контура сгnаживания , который переходит в контур точ­
ного останова следующей команды перемещения .
Преимущества сглаживания :
•
меньший износ ;
•
меньшее время такта
Q)• . ,
.,
.
.,
.2,
•
(3)
.,
5
р2
..,
20
.,
25
Рис. 6-6 : Сгnаживание точного остано ва в сравнении
30
KUKA
KUKA
п
or амми ование
обота 1
Чтобы МОЖНО было выполнить перемещение со сглаживанием, система
управления должна считать следующие за пи си п еремещен ия . Это вы ­
полняется посредством предварительного запуска ком пьютера .
Сглаживание в виде перемещения РТР
Вид перемещения
Особенность
Расстояние сглаживания
РI
"'" ,
•
•
Р3
Контур сглажива-
Заданное процент-
ния непредскаэу-
ное значение
ем!
•
Р2 СОНТ
Порядок
дейст ви й ДJlЯ
создания
перемещений
РТР
Необходимые условия
•
Установлен режим работы Т1 .
•
Выбрана програм ма робота.
1.
Переместить точку тер в п оложение , которое ДОЛЖНО быть запрог­
раммировано в качестве целевой точки .
BASE
TOOl
Рис. 6-7: Команда перемещеНИА
2. Установить курсор в строку , после которой должна быть вставлена
команда пере м ещения .
З.
Выбрать последовательность меню Команды> Перемещение >
РТР.
В качестве альтернативы в соответствующей строке можно нажать
на програ мми руемую клавишу Перемещение.
Появится встроенный формуляр:
встроенный формуляр РТР.
ср ср
ер
т ер
Рl ~ fCOO] y~· B~ ~
EI
Рис . 6-8: Встроенный формуляр движения РТР
4.
Установить пара м етры во встроенном формуляре .
KUKA
По
Описание
з.
Вид перемещения РТР, LIN или CIRC.
1
2
Имя целевой точ ки указывается автоматически , одна ко е го
можн о переэаписать вруч ную .
Для обработки да нны х ТОЧ КИ коснуться стрел ки ; откроется ОКНО
опций Фреймы .
ДNЯ CIRC помимо целевой точки следует запрограммировать
вспо могательн у ю точ ку: выполнить п одвод к положени ю ве п о-
м оraтельной точки и нажать кноп ку Touchup НР.
3
CONT: сглаживание целевой точк и ;
[пусто] : точны й подвод в целевую точку.
Скорость :
4
перемещения РТР : 1-100 % ;
переме щения по траектории :
0,001-2 м/с .
Набор данных перемещения :
5
ускорение ;
расстояние сглаживания (при вводе CONT 8 поле (3»;
контроль ориентации (ТОЛЬКО ДПЯ перемещений по траектории ).
5. В о кне оп ций « Фрей м ы » ввести верные данные дnя системы КООРДИ­
нат ин струмента и ОСНОВН ОЙ системы координат , а также дан н ые О ре­
жиме интерполяции (внешняя точка ТеР : вкл .lвыкл . ) и контроле
возможности столкновения .
I T~г----------г--, ~г----------г--,
0----i--.,,~')
1· / '''''-'''T~') \ l------w
~ ТСР
0-+--1L
F~_ _
1>XnO:IНaIa_ (Т~
-----.J---,j Е...
Рис. 6-9: Окно опций фреймы
Поз .
1
~ . 1-0
-
Описание
Выбрать инстру мент.
Если установлено True в поле 8неwний ТСР : выбрать заготовку.
Диапазон значений : [1Н16].
2
Выбрать базу .
Есл и установлено True в поле 8неwний ТСР : выбрать стационарный инструмент .
Диапазон значений : (1)-[З2} .
KUKA
n or aMM~ ован..,е
ОТ3 1
Поз.
Описание
Режим интерполяции:
3
False: инструмент смонтирован на установочном
фланце;
True: инструмент является стационарным .
True: ДЛЯ этого перемещения система управления ро-
4
ботом определяет осевые моменты . Это необходимо
для распознавания столкновения;
False: ДЛЯ этого перемещения система управления роботом не определяет осевые моменты. Поэтому распознавание столкновения ДЛЯ этого перемещения
невозможно.
В окне опций «Параметры перемещения» можно уменьшить ускоре­
6.
ние с максимального значения. При активации сглаживания можно
изменить расстояние crлаживания. В зависимости от конфиryрации
расстояние устанавливается в мм или %.
[~]
0-D I
~~
[пvn)
'''1
•••••••••• 111••••••••• 111.111
l
Рис. 6-10: Окно опций параметры перемещения (РТР)
Поз.
Описание
1
Ускорение
Относится к указанному в технических данных максимальному значению . Максимальное значение зависит от типа
робота и YCTaHoвneHHoгo режима работы. Ускорение действует ДЛЯ ведущей оси этой записи перемещений:
1-100 %.
2
ЭТО поле отображается только при условии , что во встроен-
ном формуляре было выбрано CONT.
Расстояние до целевой точки , на которой сглаживание начинается раньше всего.
Максимальное расстояние : половина расстояния между
начальной и целевой точкой по отношению к контуру перемещения РТР без сглаживания:
1-100 %;
1-1000 мм.
7.
Сохранить команду . нажав кнопку Команда ОК. Текущее положение
тер принимается в качестве целевой точки .
6 Саща .. ие и и]мене .. ие 1<.1
аг <.Iмми
.,<.I.... ых пе
et.oещ ........
Рис. 6-11: Сохранение координат ТОЧКИ при «Команда ОК» и
«Touchup»
6.4
Упраж нение : программа Air - обращение с программой и п е ремещения
РТР
цел ь упраж­
После успешного завершения этого упражнения вы будете в состоянии
нения
выполнить следующие операции :
•
в ы бор и отмена выбора п рогра м м ;
•
выполнение , останов и сброс программ втребуемых режимах работы
(тестирование выполнения программы ) ;
•
исправлен и е им еющихся точек програм м ы ;
•
•
удален и е записей перемещения и вставка н о вых переме щений РТР ;
изменение вида в ыполнения программы и поэтапный подвод к за­
прorpаммированным точкам ;
•
выполнение и понимание выбора записи ;
•
выполнение пере м ещения SAK
Н ео бходимы е
Чтобы успешно завершить это упражнение , требуется следующее :
условия
•
теоретические знания об обращении с навигатором ;
KUKA
KUKA
n or эмми ование
обота 1
теоретические знания о виде перемещения РТР .
•
Р2
Пост ан овка
задач , часть А
Выполнить следующие задачи : созда н ие и тестирование программы .
1.
Создать новый модуль с именем Air_PROG.
1&. ОСТОРОЖНО I Опасно!
Обязательно соблюдать правила техники безо
паСНQСТИ , предписанные инструктажем!
2. Создать последовательность из прибл . пяти записей перемещения
РТР .
З.
в случае с перемещением без столкновений удалить соответствую­
щую (-ие) точку(- и ) и создать новую точку .
4 . Протестировать программу в режиме работы Т1 с различными скоро­
стями выполнения программы (POV).
5.
Протестировать программу в режиме работы Т2 с различными скоро­
стями выполнения программы (POV).
6.
Постановка
задач. част ь В
Протестировать программу в режиме работы «Автоматика » .
Выполнить следующие задачи : коррекция программы .
1.
2.
Установить различные скорости для точек в пространстве .
з.
Удалить записи перемещения и повторно добавить новые в другом
Вызвать одну и ту же точку в программе несколько раз .
месте программы .
4.
Выбрать запись .
5.
Остановить программу в режиме тестирования и использовать функцию За п уск про гра м м ы в обр атно м н ап равл ен ии .
6. Проверить программу в режимах Т1 , Т2 и «Автоматика » .
Ч то сл едует з н ать посл е вы п олн е ни я этого у п ражн ени я :
1. В чем заключается различие между выбором и открыванием програм ­
мы ?
6 СО1ll.а><ие .. "ЭМf!нен .. е Э8П Of 81011011'1
88Ю'ЫJl'
_
..
2. Какие существуют виды выполнения программы и для чего они исполь­
зуются ?
з . Что предстаеляет собой перемещение SAK?
4. Как можно повлиять на с корость выполнения программы ?
5. Чем характеризуется перемещение РТР ?
KUKA
KUKA
п
r aMMI1 OaaHl1e
Оl)oта 1
Создание перемещен и й ПО траекториям
6.5
Виды переме­
щения LIN м CIRC
Вид перемещения
Значение
Пример ИСПОЛЬ30В8НИЯ
иnеаг. линейное:
Области применения , свя-
Р1
~
о
прямолинейное перемещение по траектории ;
о
р2
занные с определенной траекторией, напр . :
точка тер инструмента
о
перемещается от на-
о
скnеивание;
о
лазерная сварКа/резка.
чальнои до заданной
ТОЧКИ с постоянной ско-
контурная сварка ;
ростью и заданной ориентацией ;
о
СКОРОСТЬ и ориентация
относятся к точке тер .
Ciгcu/ar. круговое :
Р1
CIRC
О
Р3
круговая траектория перемещения задается на-
чanЬНОЙ ,
вспомогательной и цеnе-
Р2
вой точками ;
о
Области при менения, связанные с определенной траекторией , как в случае с
перемещением LIN:
о
круги , радиусы , закругления.
точка тер инструмента
пере ме щается от нз-
чальной до задзнной
точки С ПОСТОЯННОЙ скоростью и заданной ориентацией ;
о
скорость и ориентация
относятся к инструменту
(системе координат инструмента).
Роботы KUКA с 6 степенями свободы имеют Зразличных сингулярных
С ИНГУЛЯРНЬlе
положения
положен ия
Сингулярное положение характеризуется тем . что однозначная обратная
трансформация ( пересчет прямоугольных координат в осевые значе­
ния ), несмотря на то . что заданы состояние и поворот , невозможна В
зтом случае . а также если малейшее изменение прямоугольных коорди ­
нат приводит к очень большим изменениям осевых углов . говорят о син ­
гулярных положениях . Это не механическое . а математическое своИство .
которое существует по этой причине только в области перемещении по
траектории . а не осевых перемещений
При сингулярности перевернутых положении точка запястья (= цент­
С ингулярность
ральная точка оси А5 ) лежит вертикально на оси А1 робота
перевернутых
Положение оси А1 не возможно однозначно определить путем обратной
положений 01
трансформации , ПОЭТОМу она может принимать любые значения
ь Создание и изменение заn о
амми
l'Iанных nе емещеН III И
Рис. 6-12: С ингулярность перевернутых положений (положение 01)
При сингулярности развернутых положении точка запястья (= централь­
С ингулярность
ная точка оси А5 ) лежит на продолжении осеи А2 и АЗ робота
р азвернутых
Робот находится на краю своей рабочеи зоны
положе нии 02
Обратнои трансфор мацией можно однозначно определить осевои угол ,
однако следствием малых скоростеи в прямоугольных координатах яв­
ляются большие осевые скорости осей А2 и АЗ
Рис . 6-13: Раз вернутое положение ( положение 0 2)
При сингулярности ручных осей оси А4 и А6 расположены паралпельно
С ингулярность
друг другу . ось А5 в диапазоне ±О . О1812
ручных осе .. 05
Положение обеих осей невозможно однозначно определить путем об­
ратнои трансформации Но существует сколько угодно положении дnя
осей А4 и А6 с одинаковой су ммой осевых углов
KUKA
KUKA
n
<ра
..."",,, она",,!!
ora ,
Рис . 6-14: Сингулярность ручных осей (положение а5)
Контроль ориен­
При перемещениях ПО траектории можно точно определить контроль
тации при
ориентации . Инструмент может иметь различные ориентации в началь­
перемещенмях
по траектории
ной и в целевой точке перемещения.
Контроль ориентации ДЛЯ вида перемещения LIN:
•
Стандартный или Ручной РТР ;
Ориентация инструмента ВО время перемещения постоянно меняет­
ся .
Использовать значение «Ручной РТР» в ТОМ случае, если робот попа­
дает в сингулярность ручных осей со значением "Стандартный», пос­
кольку ориентирование осуществляется посредством линейного
перевода углов ручной ОСИ (осевое перемещение).
Рис. 6-15: Стандартный
•
ПОСТОЯННЫЙ.
Ориентация инструмента во время перемещения остается постоян ·
ной, как было запрограммировано в начальной точке. Запрограмми­
рованная в конечНОй точке ориентация игнорируется.
6 СОJза .... е .... J... e .. e .... e JIIП
Тра ........ рОIli)ииыJ
еМеще ......
Рис. 6~16: Постоянная ориентация
Ко нтроль орие нтации ДЛЯ вида перемещения CIRC :
•
Стандартный или Ручной РТР ;
Ориентация инструмента во время перемещения постоянно меняет ~
со .
использовать значение « Руч ной РТР » в том случае, если робот попа­
дает в си нгулярность руч ны х осей со значением . СтандартныЙ » , пос­
кольку ориентирование осуществляется посредством линейного
перевода угло в ручной оси (осевое перемещение).
-- ---
Рис . 6-17: Стандарт + относительно базы
•
Постоянный .
Ориентация инструмента во время перемещения остается постоян­
ной , как было запрограммировано в начально й ТОЧkе. Запрограмми­
рованная в конечной точке ориентация игнорируется .
KUKA
KUKA
- -- -- -...-----J,.I
Рис. 6-18: Постоянная ори е нтация + относительно базы
Последователь­
Здесь атсчетная точка инструмента или заготовки перемещается по дуге
ность "ереме­
окружности к целевой точке . Траектория описывается начальной , вепо-­
щений при CIRC
могательнои и конечной точками . При этом начальной ТОЧКОЙ является
цел евая точка предыдущей команды п времещения.
Ориентация инструмента во вспомогательной точке не играет никакой
роли .
Рис. 6-19: Два круговых сегмента с CIRC
Сглаживание
перемещений по
траектории
Функция сглаживания не предназначена для создания круговых
[jJ
~
перемещениЙ . Речь идет исключительно о предотвращении точ ­
ного останова в точке .
Сглаживание в видах перемещений РТР . LIN и CIRC
Вид перемещения
Особенность
Расстояние сглаживания
~P3
•
Ход траектории
Указание значений в
соответствует
мм
двум параболическим нагрузкам
Р2 СONТ
Р1
CIRC
~
Р2
•
Ход траектории
Указание значений в
соответствует
мм
двум па рабол ическим н агрузка м
tI Созда .. \'If! и iUr.leне .. ие 33
Порядок
действий дnя
создания
перемещений
LIN иСIRС
а ... ',ш
1I(I.... ыж пе е ... еще"~~
Необходимые условия
•
Установлен pe~M работы Т1.
•
1.
Выбрана программа робота.
Переместить точку ТСР в положение, которое должно быть запрог раммировано в качестве целевой точки .
Рис. 6-20: Команда перемещения с LIN и CIRC
2.
Установить курсор в строку , после которой должна быть вставлена
команда перемещения .
з.
Выбрать последовательность меню Команды:> Перемещение :> LIN
или CIRC.
В качестве альтернативы в соответствующей строке можно нажать
на программируемую клавишу Перемещенме .
Появится встроенный формуляр:
встроенный формуляр UN;
Рис. 6-21: Встроенный формуляр движения LIN
встроенный формуляр CIRC.
Рис. 6-22: Встроенный формуляр перемещения CIRC
4.
Установить параметры во встроенном формуляре .
KUKA
KUKA
п
f
аl,1МYI ООЭНYlе робота 1
ПО
Описание
3.
1
Вид перемещения РТР, LIN или CIRC.
2
Имя целевой точки указывается автоматически, однако его
можно перезаписать вручную.
Для обработки данных точки коснуться стрелки; откроется окно
опций Фреймы .
Для CIRC помимо целевой точки следует запрограммироватъ
вспомогательную точку: выполнить подвод к положению вспо-
могательной точки и нажать КНОПКУ Touchup НР. Ориентация
инструмента во вспомогательной точке не играет никакой роли .
CQNT: сглаживание целевой точки ;
3
[пусто]: точный ПОДВОД в целевую ТОчку .
Скорость:
4
перемещения РТР : 1-100 %;
перемещения ПО траектории : 0,001-2 м/с.
Набор данных перемещения :
5
ускорение;
расстояние сглаживания (при вводе CONT в поле (3));
КОНТРОЛЬ ориентации (ТОЛЬКО ДЛЯ перемещений по траектории).
В окне опций «Фреймы» ввести верные данные для системы коорди­
5.
нат инструмента и основной системы координат, а также данные о ре­
жиме интерполяции (внешняя точка ТеР : вкп.lвыкп . ) и контроле
возможности столкновения .
~---т---,
~ тoo....DATA{1]
-'"
@
~ОАТАЩ
-"i---,l 1,-,,~__-,-------,j------0
!,"R
-_ _
Рис. 6-23: Окно опций Фреймы
Поз.
1
-
Описание
Выбрать инструмент.
Если установлено True в поле 8неwний ТСР: выбрать заготовку.
Диапазон значений : [1Н16].
2
Выбрать базу .
Если установлено True в поле Внеwний ТСР: выбрать стаци-
онарный инструмент.
Диапазон значений : [1Н32] ,
6 Создан~е ~ И]менение 311П
Поз.
ОГ аММИРОlIlIННЫХ пе е ... ещен~~
Описание
Режим интерполяции:
3
False: инструмент смонтирован на установочном
фланце ;
True: инструмент является стационарным.
True: для этого перемещения система управл ения ро-
4
ботом определяет осевые моменты . Это необхОдимо
для распознавания столкновения ;
False: для этого перемещения система управления роботом не определяет осевые моменты . Поэтому распознавание столкновения дnя этого перемещения
невозможно.
6.
В окне опций «Параметры перемещения» можно уменьшить ускоре­
ние с максимального значения . При активации сглаживания можно
изменить расстояние сглаживания . В дальнейшем таюке можно изме­
нить контроль ориентации .
г--
['"
0- \.........................
-)
:~
---
Рис. 6-24: Окно опций параметры перемещения (LIN, CIRC)
Поз .
Описание
1
Ускорение
Относится к указанному в технических данных максимальному значению . Максимальное значение зависит от типа
робота и установленного режима работы.
2
Расстояние до целевой точки , на которой сглаживание начинается раньше всего .
ЭТО расстояние не должно превышать половину расстояния
между начальной и целевой точкой . Если здесь будет введено
большее значение , оно игнорируется , и используется максимальное значение .
Это поле отображается только при условии, что во встроенном формуляре было выбрано CONT
3
Выбрать контроль ориентации :
стандартный;
ручной РТР;
постоянный контроль ориентации.
(»> "Контроль ориентации при перемещениях по траектории" Страница 124)
KUKA
KUKA
п
8"',,"'" oea"",~
ra ,
7.
Сохранитъ команду . нажав КI"Iопку Команда ОК. Текущее положение
тер принимается в качестве целевой точ ки .
~Q~
-'TOOL
Рис . 6-25: Сохранение координат ТQ"4kИ при «Команда ОК» и
«Touchup»
6.6
Изменение команд перемещения
Изменение
Существуют различные ПРИЧИНЫ ДЛЯ изменения имеющихся команд пе­
команд переме­
ремещения :
Щ8НИЯ
Примеры причин
Выполняемое изменение
Изменяется положение захваты-
Изменение данны х положения
ваемой детали .
Изменяется положение ОДНОГО из
ПЯТИ отверстий при обработке .
Следует УКОРОТИТЬ сварной шов.
Изменяется положение палеты.
Изменение данных фрейма : база
и/или инструмент
Положение было ошибочно
Изменение данных фрейма: база
запрограммировано с неверной
и/или инструмент с обновлением
базой .
положения
Обработка выполняется слиш·
Изменение данных перемеще-
ком медленно: следует УЛ}"-lwить
ния : скорость , ускорение
время такта .
Эффекты при
изменении
команд "ереме­
щения
Изменение данных положени"
•
Изменяется пишь набор данных точки : точkЗ п олучает новые коорди­
наты , поскольку с помощью Touchup значения обновляются .
Старые координаты точки перезаписывэются и после этого более не­
доступны .
130 I 191
Изменение вида перемещения
б Создание и изменение запрог а ...... и ованных пе е ... ещеНI1I1
Рис. 6-26: Изменение положения робота с помощью Touchup
Изменение данных фреймов
•
При изменении данных фреймов (напр., инструмент, база) возникает
смещение положения (ср. с векторным смещением) .
•
Положение робота изменяется .
Старые координаты точки по-прежнему сохраняются и являются
действительныи •. Изменяется только точка отсчета (напр . , база).
•
Может возникнуть выход за пределы рабочей области! Поэтому оп­
ределенные положения робота являются недостижимыми .
•
Если положен и е робота должно остаться прежним , но требуется из­
менить параметры фрейма, то после изменения параметров (напр. ,
базы) в нужном положении следует обновить координату с помощью
Touchup.
I&.
I
ОСТОРОЖНО Диалоговое окно пользователя также предупреж
I ~·""~~~~~~=. дает: «Внимание! При изменении связанных с
точкой параметров фрейма существует опасность столкновения!» .
Рис. 6-27: Изменение данных фрейма (пример базы)
KUKA
KUKA
n ог эмм\\ оезние
обота 1
Изменение данных перемещения
При изменении скорости или ускорения изменяется профиль переме­
•
щения. Это может оказать влияние на процесс обработки , особенно
в областях применения, связанных с определенной траекторией:
толщина клеевого валика;
качество сварного шва .
Изменение вида перемещения
•
Изменение вида перемещения всегда ведет к изменению планирова­
ния траектории. Зто может привести в неблагоприятных случаях к
столкновениям, поскольку траектория может непредсказуеМQ изме­
НИТЬСЯ .
Рис. 6-28: Изменение вида перемещения
Указания по
технике безопас­
1.& ОСТОРОЖНО IПосле каждого изменения команд перемещения
1'.= '-=:.::.:..::.:....::::::::.:"'-1. следует протестировать программу робота при
ности для
пониженной скорости (режим работы Т1).
изменения
Немедленный заПУСК,программы робота при высокой скорости может
команд "ереме­
привести к повреждению системы робота и всей установки, так как воз­
можны непредсказуемые перемещения. Если в опасной зоне находится
щения
какое-либо лицо, возможны опасные для жизни травмы.
Изменение
1.
2.
параметров
перемещения
фреймы
-
Установить курсор в строку с командой, которую следует изменить.
Нажать кнопку Изменить . Откроется встроенный формуляр команды .
з.
Открыть окно опций «Фреймы».
4.
Установить новый инструмент или базу или внешнюю точку ТСР.
5.
Подтвердить пользовательское диалоговое окно «Внимание! При из­
менении параметров фрейма существует опасность столкновения!»
нажатием на кнопку ОК.
6.
Если требуется сохранить текущее положение робота с изменен­
ными настройками инструмента или базы, следует удерживать кноп­
ку Touch Up, чтобы повторно рассчитать и сохранить текущее
положение .
7.
Сохранить изменения , нажав кнопку Команда ОК.
б Создание и юменение за
'.&.
r 3ММИ ОIlЗННЫХ пе е",ещении
I
ОСТОРОЖНО При изменении парамвтрав фрейма следует пав
торно проверить программы на предмет отсутс­
твия столкновений.
Изменение
положения
Порядок действий для изменен ия положения робота :
1.
Выбрать режим работы Т1 и установить курсор в строку с командой ,
которую следует изменить .
2.
3.
Привести робот в нужное п оложе ние .
Нажать кнопку Изменить. Откроется встроенный формуляр коман­
ДЫ .
4.
Для перемещений РТР и LIN:
нажать кнопку Touchup, чтобы принять текущее положение ТСР
в качестве новой целевой точки .
Для перемещений CIRC:
нажать кнопку Touchup НР , чтобы принять текущее положение
ТСР в качестве новой вспомогательной точки ;
или нажать кнопку Touchup ZP, чтобы принять текущее положе­
ние ТСР в качестве новой целевой точки .
5.
Подтвердить операцию , ответив Да на контрольный запрос.
6.
Сохранить изменения , нажав кнопку Команда ОК.
Изменение
Этот порядок действий можно использовать для внесения следующих
парамеТРО8
изменений :
перемещения
•
вид перемещения ;
•
скорость ;
•
ускорение;
•
сглаживание ;
•
1.
расстояние сглаживания .
2.
Установить курсор в строку с командой , которую следует изменить.
Нажать кнопку Изменить . Откроется встроенный формуляр коман­
ДЫ .
з.
Изменить параметры.
4.
Сохранить изменения, нажав кнопку Команда ОК .
'.&.
"""-'
=':"::0:...===I
ОСТОРОЖНО При изменении параметров перемещения следу­
ет повторно проверить программы на предмет от­
сутствия столкновений и безопасности процесса .
6.7
Упраж нение : перемещение по трае кт ории и сглаж ивание
Цел ь у п раж­
После успешного завершения этого упражнения вы будете в состоянии
н е ния
выполнить следующие операции :
•
соэдание простых программ перемещения с видами перемещений
•
соэдание программ перемещения с точками точного останова и сгла­
РТР , LIN и CIRC;
живанием ;
•
обращение с программами в навигаторе ( копирование , дублирова­
ние , переименование , удаление ) .
Н еобходим ые
Чтобы успешно завершить это упражнение , требуется следующее :
усл ов и я
•
основы программирования перемещений с видами перемещений
РТР , LIN, CIRC ;
KUKA
KUKA
п
r емм\'! ое<lние робота 1
теоретич еское знание сглаживания пере м ещений ;
•
р2
РЗ
Р1
теоретическое знание положения НОМЕ .
•
П остановка
Выполнить следующие задачи : соэдание nporpaMMbl контура детал и 1.
зада ч , часть А
1. Создать нову ю программу с именем Контур.-детали 1 .
2.
Обучить ее на рабочем столе контуру детал и 1 с испол ьзованием си н ей базы и штифта 1 в качестве и н струмента :
с корость п еремеще ния на рабочем столе составляет 0,3 м/с ;
соблюдать постоянное вертикальное положение продольной ОСИ
инструмента к контуру траектории ( контроль орие н тации ) .
З.
Проверить п рограмм у в режи м ах Т1 , Т2 и « Автом ати ка » . Следует
соблюдать правил а техники безоп асноCПI в рамках инструктажа .
-
----~--------
®
•
,
Рис . 6-29: Пере мещение ПО траект ории и сглаживание : контур дета ­
ли 1 и 2
1
3
5
Начальные точки
2
Н а п равлен и е пере мещения
Отсчетная база
4
Контур детали 1
Контур детали 2
Выполнить следующие задачи : копирование програ м мы и сглаживание .
Поста нов ка
з адач , ч асть В
1.
Создать ко п ию про граммы « Контур....детали1 » с и менем
ДеТЭЛl:. 1
2.
CONT.
Добавить в ком анды перемеще ННR новой программы кома нду сгла­
живания таким образом , чтобы контур ПОЛ Н ОСТ Ь Ю оБВОДИЛСЯ .
З.
Углы контура ДОЛЖНЫ быть обведе н ы с р азл ичными пара метрами
сглажива н ия .
4.
Провер ить програм м у в режимах Т 1 , Т2 и « Автоматика » . Следует
соблюдать п равила техн ики безо п ас н ости в рамка х инструктажа .
Выпол нить следую щи е задач и : соэдание програ м м ы контура детал и 2.
Постановка
задач : дополни ­
тел ь ная з ада
... а .
1.
Создать вторую програм м у с именем КоНтур.....детали2 . И с п ольэо·
вать ту же базу и тот же и н струмент :
скорость перемещения н а рабочем столе составляет 0,3 м/с ;
1341191
Ста
6 Соэдэн\\е \\ ИJменение зап от амм\\ ованных пе емещен\\\\
соблюдать постоянное вертикальное положение продольной оси
инстру м ента к контуру траектории (контроль ориентации) .
2.
П роверить программу в режимах Т1 , Т2 и «Автоматика» . Следует
соблюдать правила техники безопасности в рамках инструктажа .
З.
Создать копию программы «Контур-детали2» с именем
Деталь 2_С ОNТ .
4. Добав ить в KOMaHAbl перемещения новой программы команду сгла­
живания таким образом , чтобы контур полностью обводился .
5.
Проверить программу в режимах Т1 , Т2 и «Автоматика» . Следует
соблюдать правила техники безопасности в рамках инструктажа .
ЧТО следу ет з нать се йч ас:
1. Чем характеризуются перемещения LIN и CIRC?
2. Как указывается скорость перемещения ДЛЯ перемещений РТР, LIN и
CIRC и к чему относится эта скорость?
З . Как указывается расстояние сглаживания для перемещений РТР , LIN
и CIRC?
4. На что следует обратить внимание при повторном программировании
команд CONT?
5. На что следует обратить внимание при изменении положения НОМЕ?
6. Что следует учитывать при исправлении или изменении запрограмми­
рованных точек?
KUKA
киКА
n
rрзо,оми
6.8
3Ние
ora 1
Программирование перемещений с внешней точкой тер
Программиро­
При программировании перемещений со стационарным инструментом
вание переме­
ПРОЯ8ЛЯЮТСЯ следующие отличия процесса перемещения от стандарт­
щемий с
ного перемещен ия :
внешнем точкой
•
обозначение во встроенном формуляре : в окне ОПЦИИ Фреймы за­
пись Внешний тер должна быть установлена на значение TRUE;
тер
..
т
SCHEIBE
[22[
[12[
-
...
_
Рис. 6-30: Окно опций ((Фреймы»: вившн. тер
•
скорость перемещенмя ОТНОСИТСЯ к внешней точке тер ;
•
ориентация ВДОЛЬ траектории также ОТНОСИТСЯ к енешнем у инстру­
менту ;
•
следует указать как подходящую основную систему координат (ста­
ционарный инструмент/внешняя точка тер) , так и подходящую сис­
тему координат инструмента (подвижной заготовки) .
Рис. 6-31: Системы координат при стационарном инструменте
6.9
Упражн е ние : программирование перемеще ния с внешн е й точкой тер
Цель упраж­
После успешного завершения этого упражнения вы будете в состоянии
не ни я
выполнить следующие операции:
•
программирование перемещений с перемещаемой роботом деталью
относительно стационарного инструмента .
KUKA
Н еобходимы е
усл о вия
Чтобы успешно завершить это упражнение, требуется следующее:
•
знания об активации внешнего инструмента при программировании
перемещениЙ .
Поста новка
Выпол н ить следу ю щие задачи : программирование ко нтура ДЛЯ нанесе·
задач
ння клея :
1. Вручную зажать табличку в захвате .
2. Выполнить обучение контуру таблички под именем программы
Н аклеива н ие_табл и ч ки :
дЛЯ ЭТОГО испол ьзовать откалиброва н н ый внешний инструмент
С о пло и заготов ку Таблич ка ;
соблюдать постоянное вертикальное положение ПРОДОЛЬНОЙ ОСИ
стационарного инстр умента к конту р у на н есения клея ;
СКОРОСТ Ь пе ремещения на табличке составл яет 0.2 м/с .
З.
Проверить программу согласно п редп и санию .
4.
Архивировать программу .
Что следует знать с ейч а с ;
1. К чему ОТНОСИТСЯ запрограммированная скорость нанесения кл ея?
2. Как актив и ров ат ь внешний инстру м ент в п р ограмме?
KUKA
n ог эмми оваНl'lе
обота 1
7 I<1CnОIlЬ308i1НИ!! III1n'1'feСКИХ
7
НlЩИи 11 11 of ilММ!!
о6ОТiI
Использование логических ФУНКЦИЙ в программе робо­
та
7.1
Обзор
в этом учебном разделе рассматриваются следующие элементы:
7.2
•
программирование ФУНКЦИЙ ожидания;
•
п рограммирование п ростых ФУНКЦИЙ переключения ;
•
программирование фУНКЦИЙ переключения траектории .
Введение в проrраммирование лоrики
Использование
входов и
выходов при
программиро­
вании логики
Рис . 7-1: Цифровые входы и выходы
Чтобы обеспечить связь системы УПР8влвния роботом с периферией ,
можно UCnOl!ьзовать цифровые и аналоговые входы и выходы .
Определение терминов
Термин
Опредenение
Пример
Связь
Обмен сигналами по
Запрос состояния
интерфейсу
(захват открыт'
закрыт)
Периферия
«О кружение,.
Инструмент ( напр .,
захват, сварочные
клещи и т. д .), датчи ки, системы транспортировки
м атериала и т. д.
Цифровой
Ц ифровая техника:
Сигнал датчика :
Дискретные по значе-
наличие детали : зна-
нию и времени сиг-
чение 1 (ТRUЕ1
налы
истинно) , отсутствие
детали : значение О
(FАLSЕJложно)
Аналоговый
Изображение физи-
Измерение темпера-
чесКОЙ величины
туры
KUKA
KUKA
n
r а~'МI\ ОIlЭliие
Обота 1
Термин
Входы
Опредenение
Пример
Поступающие к сие-
Сигнал да~ика :
теме управления
захват открыт/захват
через интерфейс
закрыт
магистральной шины
сигналы
ВЫХОДЫ
Отправпяемые ОТ сие-
Команда переключе-
темы управления
ния клапана , которая
через интерфейс
ведет к закрыванию
м агистральной ШИНЫ
крюка ДЛЯ захвата .
сигналы
При программировании роботов KUКA применяются еходные и выход­
ные сигналы ДЛЯ логических команд:
•
OUT: переключение выхода в определенном месте программы;
•
WAIT FOR: зависящая от сигнала функция ожидания: эдесь система
управления ожидает сигнал :
ВХОД IN;
BbIxoAOUT;
сигнал времени TIMER;
внутренний адрес памяти системы управления (маркер/однораз­
рядная память) FLAG или CYCFLAG (при ПОСТОЯННОЙ цикличес­
кой оценке) ;
WAIT: зависящая от времени функция ожидания: система управле­
•
ния ожидает в этом месте программы в течение введенного времени.
7.3
Программирование функций ожидания
Предвари­
При предварительном запуске компьютера считываются записи переме­
тельный запус к
щения (невидимые для оператора) во время предварительного выполне­
компьютера
ния , чтобы система управления могла планировать траекторию при
командах сглаживания . С предварительным выполнением обрабатыва­
ются не только данные перемещения , но и арифметические и управляе­
мые периферией команды .
1
DEF Depal_BOX1 ( )
2
э
IНI
~
РТР НОНЕ
U@l - 180 \ DEFAUlT
5 РТР Р1 U@1 - 180 \ РОАТ1 Tool[5]:CRP1 Base[18]:STAT1
6 " РТР Р2 Uel - 11O \ РОАТ2 TOol[5]:CRP1 Base[10]:STAT1
7 LIH РЗ Ue} - 1 .ts СРОАТ1 Tool[S]:CRP1 Base[10]:STAT1
8 llH P~ U@1-1 ~s СРОАТ2 TOOl[S]:CRP1 Base[10]:STAT1
9 РТР PS U@1-180 \ РDАТЗ TOOl[S]:CRP1 Base[10]:STAT1
10 DUY 26" State- YRUE
11 РТР НОНЕ U@1-108 \ POAT~
12
Рис. 7-2: Предварительный запуск компьютера
Строка
6
Положение указателя основного
выполнения (серая полоса)
1401191
7 ИCnOПЬЭОВ8><ие ПOl1<чески~
.. Кц ...... В" orpaMr.Ie
та
KUKA
Строка
9
Возможное положение указателя
предварительного выполнения
(не видно)
Набор команд, который при водит
10
к срабатыванию предваритель·
ного выполнения
Некоторые команды приводят к срабатыванию останова предваритель·
ного выполнения. К ним относятся команды , влияющие на периферию ,
напр ., кома нды OUT (закрыть захват, открыть сварочные клещи) . Если
указатель предварительного выполнения остановится , то сглаживание
невозможно .
Функции
Функции ожидания в программе перемвщения позволяют просто выпол­
ожидания
нить программирование с помощью встроенных формуляров . Различают
зависимую от времени функцию ожидания и зависимую от сигнала фун
кцию ожидания .
С помощью WAIT перемещение робота останавливается на запрограм·
мированное время . WAIT всегда приводит к останову предварител ьного
выполнения .
YIAlТ
рис. 7·3: Встроенный формуляр WAIT
I Поз. IОп.~"ие
Пример nporpaMMbl:
РТР
РТР
Pl v,l - lOO \ POATl
Р2 v,l - lOO \ PDAT2
МАХТ
РТР
Ti8e.2 .ее
Р3
Vel_ 100\
PDAT 3
Р3
Рис. 7~: При мер переМ8щения для логики
Пos.
Примечание
1
Перемещение прерывается на 2 секунды в точке Р2 .
WAIT FOR устанавливает зависимую от сигнала фун кцию ожидания .
П ри необходимости можно логически связать несколько сигналов (макси·
мум 12). Еслидобавляетс я соэдание связи , то ео встроенно м фор муляре
добавляются поля для доп олнительных сигналов и для други х сеязеЙ.
141 I 1"1
KUKA
п
or aMM~pOBaH"e
обота 1
ер
ер ер срср
~
Wд1ТF<ЖЕ] ([J00D) r~
Рис. 7-5: Встроенный формуляр WAITFOR
Поз.
1
Описание
Добавить внешнюю связь. Оператор находится между заключенными в скобки выражениями:
• AND;
• OR;
• EXQR.
Добавить NOT
• NOT;
•
[п усто].
Ввести нужный оператор с ПОМОЩЬЮ соответствующей экран-
НОЙ КНОПКИ .
2
добавить внутреннюю связь . Оператор находится внутри
звключенноro в скобки выражения:
• AND;
• OR;
• EXOR.
Добавить NOT
• NOT;
•
(пусто].
Ввести нужный оператор с помощью соответствующей экранной КНОПКИ .
3
Ожидаемый сигнал:
• IN;
• OUT;
• CYCFL.AG;
• TIMER;
• FLAG.
4
Номер сигнала:
• 1-4096.
5
Если У сигнала имеется имя , это имя отображается .
Только для группы пользователей «Эксперты»:
нажатием на КНОПКУ Описание можно ввести ИМЯ . ИМЯ эадается свободно.
6
•
СОНТ: обработка в предварительном выполнении ;
• [пусто]: обработка с остановом предварительного выполнения .
I Д:; ВНИМАНИЕ
I
При использовании записи CONT следует учиты-
вать , что сигнал будет опрошен в предваритель-
ном выполнении. Иэменение сигнала после времени предварительного
выполнения не определяется .
7 ИСnOnЬ30lан~ nОfИчеClCИХ
НКU"И I
n or амме
та
Логические
Логические связи также используются в зависящих от сигналов функциях
связи
ожидания . С помощью логических связей можно сочетать запрос различ·
ных сигналов или состояний : напр ., можно создать зависимости , а также
исключить о пределенные СОСТОЯНИЯ .
Результат функции с логическим оператором 8сегда содержит истинное
зн ачение, т. е . 8 конце все гда наход ится значе ни е TRUE (значение 1) или
значение FALSE (значение О).
Выражение
Операто
WAIТ FOR~ N3 AND IN4~rl_,.>
истинн
ЛОЖНО
Выражения
рис. 7-6: Пример и принцил логической связи
операторы для логических связей :
•
NOT: этот оператор используется для отри цания . т. е. значение изме­
няется на противоположное (TRUE прееращается в FALSE);
•
AND: результат этого выражения является истинным , если оба свя­
занных выражения являются истинными ;
•
OR: результат этого выражения является истинным . если по крайней
мере одно из связанных выражений является истинным ;
•
EXOR: результат этого выражения является истинным , если оба свя­
занных оператором выражения имеют разные значения истинности .
Обработка с
Зависящие от сигнала функции ожидания можно запрограммировать как
предвари·
с обработкой в предварительном выполнении , так и без нее. Без пред·
тельныM выпол·
нением и без
него (CONT)
варительного выполнения означает, что перемещение остановится в
точке в любом случае , а сигнал будет проеерен е ней : (>>> Рис. 7-7) (1).
Таким образом , сглаживание этой точки невозможно .
РЗ
р2
рис. 7-7: Пример перемещения для логики
Pl Vel - 1 00, PDATl
Р2 СОНТ Vel - 100\ РDАТ2
tIAIТ FOa DI 10 '400It_IigD&l '
ртр рз Vel =1 00\ РDЛТ3
РТ Р
ртр
УВЕДОМЛЕНИЕ
При обработке строки с WAIT FOR без CONT по­
явится информационное сообщение: «Gглажи ва-
ние невозможно» .
Зависящие от сигнала функции ожидания , запрограммированные с
предварительным выполнением , позволяют выполнить сглаживание
точки, созданной перед строкой команды . Однако текущее положение
указателя предварительного выполнения неоднозначно (стандартное
значение: три записи перемещений ), поэтом у точный момент времени
для проверки сигнала не определен
(»> Ри с . 7·8) (1). Кроме того , изме­
нения сигнала после проверки сигнала не определяются.
KUKA
KUKA
РЗ
г-<JJг<D
P2 ~~==~=I====I====~P1=_=
Рис . 7-8: При мер перемещения дnя логики с предварительным вы­
полнением
ртр Рl
Уеl- 100 \
ртр Р2
CONT Vel - l00 \
"ЛIТ
ртр
Порядок
1.
РОАТl
РDАТ2
FOR :1:11 10 ·c1oo~_. lgz1.8.1'
Р3 Vel _ lOO\ PDAT3
CORТ
Установить курсор в Cipoкy , после которой должна быть вставлена
логичес кая ком анда .
действий
2.
Выбрать последовательность меню Команды > Логика > WAIT FOR
илиWАIТ.
7.4
3.
Во встроенном формуляре установить параметры .
4.
Сохранить команду , нажав кнопку Команда ок.
Программирование простых функций переключения
Простая
с помощью функции переключения МОЖНО отправить цифровой сигнал к
фУНКЦИЯ
периферии . Для этого используется номер выхода , который следует за­
перекnючеНИR
ранее задать в интерфейсе соотвеТСТВУЮЩИМ образом .
ОUТ(5)
1
•
OUT 5 'rob_ready'
Sta~e.TRU E
РИС. 7-9: Статическое переключение
Сигнал устанавливается статично , т . е . он сохраняется до тех пор , по ка
для выхода не будет задано другое значение . Функция переключения ре­
ализуется в программе с помощью встроенного форм уляра :
CXJТ
ер ер
110
!t
ер
g,~,~ EJ
Рис. 7-10: Встроенным формуляр OUT
7 ИCnOI1Ь]QR8ние пorи ... ес~И~
Поз .
1
2
НКI.U'И 11 n
амме
та
Описа ние
Номер выхода :
• 1-4096.
Если У выхода есть имя . это имя отображается .
Только для группы пользователей . Эксперты » :
нажатием на кнопку Описание МОЖНО ввести имя . И м я зада-
ется свободно.
3
Состояние, в которое переключается выход :
• TRUE;
4
• FALSE.
• CONT:
•
обработка в предварительном выполнении ;
[пусто]: обработка с остановом предварительного выполнения .
1.& ВНИМАНИЕ I
При использовании записи CONT следует учитывать , что сигнал будет установлен в предвари-
тельном выполнении .
Импульсные
Как и в случае с простой функцией перекnючения , здесь изменяется зна­
функции
чение выхода . Конечно , в случае с импульсом сигнал принимается об­
пеРВМЮЧВНИА
ратно через определенное время .
OUfI7]
1
o~~~:r;m~=~~--..
PUlSE 7 'air_on' State_TRUE
Т;mе- З ' ~ J
Рис. 7-11: Импульсный уровень
Программирование осуществляется с помощью встроенного формуля­
ра, который устанавливает импульс с определенной длиной .
ер
ер
ер С?
ер
PU.SE[ 12 I tesLо.ФА I Stote- JТR~I I ~1 тme- Bsoc
Рис . 7-12: Встроенный формуляр PULSE
Поз .
1
2
Описание
Номер выхода :
• 1-4096.
Если У выхода есть имя , это имя отображается .
Только ДЛЯ группы пользователей « Эксперты» :
нажатием на кнопку Описание можно ввести имя . Имя задается свободно.
3
Состояние, в которое переключается выход:
• TRUE:
•
уровень «High» ;
FALSE: уровень «Low».
KUKA
KUKA
П03.
Оп иса н ие
•
•
4
СОНТ: обработка е предварител ь ном вы п олнении;
[пусто] : обработка с остановом предварительного ВЫПОЛ ~
нения .
Длина импулЬСа :
5
• 0,10-3,00
с.
Действие записи
П ри опускании записи CONT во встроенном формуляре OUT в процессе
CONTc
переключения принудитеПЬНQ осуществляется останов предваритель·
ФУНКЦИЯМИ
переlU1ючения
ного выполнения , а в точке перед командой переключения выполняет·
СА точный останов . После установки выхода перемещение
п родолжается.
L1 N Рl Vel- O.2 m/ s CPDATl
LIN Р2 СОНТ Vel - O. 2 m/ s СРDАТ2
LIN Р3 СОН Т Ve l - O.2 m/ s СРDАТ3
о'от
5 'rob_r••esy· St;.t;. .. ТRUВ
1.1.1'4 ve1 .. 0.2 .. / .
CFDAT4
2 -?,.-_~P3
P'.i
Р1
Р4
Рис. 7·13: Пример перемещения с перекnюченмем с остановом
предварительного 8ыолненияя
Установка записи CONT приводит к тому . что указатель предварительно­
го выпол нения не оста на вл ивается (не срабат ывает останов предвари­
тельного выполнения) . Так можно выполнить сглаживание перемещения
перед командой перекnючения . Установка сигнала осуществляется в
предвармтельном выолнении
•.
r LI N Рl Уе l - 0 . 2 m/ s СР ОАТl
LIN Р2 СОМТ Уе l- 0.2 ~ /8 CPDAT2
LIN Р3 СОМТ Ve l - O. 2 m/ ~ CPDAT3
5 'rob_r_ady' st.tо_ТR1ЛI: сом'!'
LrN Р4 Vel_0.2 а/. СРОАТ4
OtIТ
P:i2-?,,-_~P3
Р1
Р4
Рис. 7-14: При мер перемещения с переключением в предваритель­
ном выполнении
7 ИСПОПttзование погичес~их Ф НКЦ!IIИ В П or эмме
оботэ
I& ВНИМАНИЕ I
Стандартное значение для указателя предвари
тельного выполнения составляет три строки. Од-
нако предварительное выполнение может меняться от случая к случаю ,
т. е . следует учитывать, что момент переключения не всегда одинаков .
Порядо к
1.
действий
Устан ов ить ку рсор в строку, п осл е которо й долж н а быть вставле на
логическая команда .
2.
Выбрать последовательность меню Команды> Логи ка > OUT > OUT
или PULSE.
3. Во встроенном формуляре установить параметры .
4. Сохранить команду , нажав кнопку Команда ок.
7.5
П рограмми р ование функций переключения траектори и
Общие сведения
Функцию переключения траектории можно использовать для того , чтобы
установить выход в определенной точке на траектори и , не прерывая пе­
ремещение робота . Различают статическое (SYN ОUТ) и динамическое
(SYN Pulse) перекnючение. В случае с перекnючен и ем SYN OUT 5 речь
идет о том же сигнале, что и в случае с SYN PUlSE 5. Различаются лишь
вид и способ переключения.
Опция StarUEnd
Операция переключения может быть запущена относительно начальной
или целевой точки записи перемещения. Операция перекnючения может
быть с мещена во времени . Запись отсчетн о го перемещения может
представлять собой перемещение llN, CIRC или РТР .
20 ms
Рис. 7-15: Встроенный формуляр $YN OUT, опция START
Рис. 7-16: Встрое н ный формуляр SYN OUT, опция END
Поз .
О писание
1
Номер выхода:
Ди апазон значений
2
1-4096.
Если У выхода есть имя , это имя отобра-
Выбирается сво-
жается.
бодно
Только ДЛЯ группы пользователей «Эксперты» : нажатием на програ м мируемую
клавишу Описание можно ввести имя.
3
Состояние, в которое переключается
выход .
TRUE , FALSE
KUKA
KUKA
п ОГ
""'' ';1 OBa .. ~e обот!! 1
Поз.
Диапазон значе-
Описание
ний
Точка , в которой происходит переключе-
4
ние :
START, END
Опция РДТН:
•
START: переключение происходит ОТ-
•
END: переключение происходит отно-
носительно начальной точки записи
перемещения.
сительно целевой точки записи перемеще ния .
Временное смещение операции переклю-
5
-1000-+1000мс
чения .
Указание: заданное время является
абсолютным. Положение точки переключения изменяется в зависимости от ско-
рости робота.
Опция Path
с помощью опции Path МОЖНО запустить операцию переключения отно­
сительно целевой точки записи перемещения. Операция переключения
может быть смещена в пространстве и/или во времени . Запись отсчетно­
го перемещения может представлять собой пере мвщвние LIN или CIRC.
Пере мещение РТР недопустимо.
SYN
~ T
OUТ I
9 ! SIGNAl 9
State=
cr ~~~
~ , рдтн 1,., Г 20 тт
Рис. 7-17: Встроенный формуляр SYN OUT, опция Path
Поз.
Описание
Диапазон значений
1
2
Номер выхода:
1-4096.
Если У выхода есть имя, это имя отобра-
Выбирается сво-
жается .
бодно
Только для группы пользователей «Эксперты »: нажатием на программируемую
клавишу Описание можно ввести имя.
3
Состояние, в которое переключается
TRUE, FALSE
выход.
4
Точка, в которой происходит переключение:
•
STДRT, END
Опция РАТН:
РДТН: переключение происходит от-
носительно целевой точки записи перемещения.
148/ 191
стат с
20092012 ВеРСf'Я P1KSS8Roboter r
ramm lerurt
1V2ruIPDFCOL
7 ИCnОЛI>ЭОlIl!ние ЛОГ\ilческих
НЩИИ 11 n О' амме
обота
По. .
Описание
ДиаП830Н значе-
5
Простра нственное смещение операции
-2000
+2000 мм
-1000
+1000 мс
ний
пере ключ еНИА .
Указание: указание места прИВАзано к
целевой точке записи перемещения .
Положе ние точки переключения не меняется несмотря на изменение скорости
робота.
б
Временное смещение операции переключения .
Указание: временное смещение относится к пространственном у смещению .
Действие опций
При мер программы 1: опция Start
переlUlючения
StartlEnd
.. 20ms
Р2
:
~
~:"-_1P3
Р1
Р4
Рис . 7-18: 5YN OUT 5tart с положительной задержкой
LIN Pl VEL- О.Зm/s CPDATl
LIN Р2 VEL-O.3m/s CPDAT2
;ФУНКЦИ~ переключения по О~НОWеНИЮ к
Р2
8'Y1I ouт •
• SIcao.I. . ' 8t.t._ ТROII . t Start Del_y_201\8
LIN Р3 VEL-O .3m/s CPDAT3
LIN Р4 VEL-O.3m/s CPDAT4
Пример программы 2: опция Start с CONT и положительно й задержкой
KUKA
KUKA
l
.. 1 0т !!;
I
Рис. 7-19: SYN OUT Start с CONT м положительной задержкой
ЫН
Рl
ым
Р2 СОНТ VE L-O .3!D./~
VE L-O . 3m1s
С РDАТ l
; Фуикци я л ерекnючекия
СРОАТ 2
по
отноше нию к
SY» оот 8 'BXaмAL 8' Sta t o . ткu. a t
LIN Р3 СОНТ VEL- O.3m/ s С РОАТ3
LJ N Р 4 VE L-О . Зm/ s СРDАТ4
Р2
8ta rt оеl а у _ l0а8
При м ер программ ы 3: опция End с отр ицательно й задержкой
• 20ms .
~ P3
Р2
Р1
Р4
Р ис . 7-20: SYN OUT ЕНО с отрицательной задержко й
LIN Рl VEL_о. Зm·'/~.Сс~,о.О"А~Т"l---------------------------------------О
ын
Р2
VE Lo>O. 3т!!! СРDАТ2
; ФУНI<ЦИ" пе реК1lJ;l" е ",," ПО 0 '1' 110_ 11 1111 1< рз
п.- оот
9 'S:IQIIIU. 9'
8t_tuв _
ИН
Р3 VEL" О .ЗJII/ , СРОАТ 3
ЫН
Р4
VE L- О.Зm/ s
по.
a t bd. Dela y . -2o..
СРDАТ4
Пример программы 4: опция End с CONT и отрицательной задержкой
KUKA
•
Р2
м
_ - - -......
....,рз
\,
Р1
Р4
Рис. 7·21: SYN OUT с опцией End с отрицательной задержкой
ЫII 1'1 VE L-Q .ЗIII/ S СРDЛТl
LIN 1'2 VEL-O . 3m/s СРDЛТ2
;ФУНКЦИN
переклю~ення
по
отношенн~
8YW olТl' 51 'SIGIRAL 9' зе ае\ЦI_ Тll.tJIi
LIN 1') CONT VEL-О.Зm/s СРОАТ3
LIN 1'4 VEL-О.Зm/s СРDАТ4
к
.е
1'3
8n4 Delay.-10_
При мер программы 5: опция End с CONT и положительной задержкой
м
. . .,
~'Oт.
Р2
Р1
Р4
Рис. 7-22: SYN QUT с опцией End м положительной задержкой
LIN Р1 VЕL-О.ЗIII/З СРОАТl
LIN 1'2 VEL-О.зm/з СРОАТ2
IФУКkЦИR
лереКЛDчения по
отноwени~ к
SY1f оот !I ·S:IOIIAl. 9' Statu•• 1'RtJJ:
Ы!!
1'3 CONT VEL-O . Зm/ з СРОА1' 3
LIN 1'4 VEL·O. Эш/" СРОАТ4
Границы перек.nючения без CONT:
.е
1'3
Кnd
Delay_10IU
KUKA
n
огра ... ",!' ова .. и~ р060Т(I ,
:
S1ДR~~
~
Р2
' Р3
•
:~
Р4
Рис. 7-23: Границы перекnючения опции startlЕпd без CONT
Границы переключения с CONT:
STAR't
: + :
~
м
.... ·I,РЗ
~'
;~ND +t......... .
" "
Р4
Рис. 7-24: Границы перекпючения опции startlЕпd с CONT
Действие опции
Пример программы:
переключения
фрезер должен переключиться на траектории. Через 20 мм после точки
Path
Р2 следует на весу начать обработку детали . Чтобы фрезер через 20 мм
(ПУТЬ = 20) после точки Р2 ДОСТИГ полного числа оборотов, его следует
включить заранее за 5 МС (задержка = -5 МС).
Рис. 7-25
7 ИCnО/1ьзова>н.. е norмчеасих
нкции 11 n
iilмме
О!)ота
ЫН Рl VE L-О .ЗmJs СРОАТl
;Функци я
ВУН ООТ
переключ е ння
,
'axQМAL
СОНТ
"
по
отноwе нию
к
Р2
S~.tU8 . тrue P. ~.20
ЫН
Р2
VE L-O . 3!11/з
ын
Р3 СОНТ VE L-O . 3'111./5 СРDАТЗ
ЫН
Р4 VELooO. 311'1./15 СРОАТ4
Delay.-S. .
СРОАТ 2
Границы переключения
РЗ
- -- 8
••
Рис . 7-26
1.
Порядок
Уста новить курсор в строку , после которой должна быть вставле на
логическая команда.
действий
2.
Выбрать последовательность меню Команды> Логика> OUT > SYN
OUT или SYN PULSE.
7.6
3.
во встроенном формуляре установить пара метры .
4.
Сохранить команду . нажав кнопку Команда ОК .
Упражнение: логич еск ие команды и функции п е ре ключения
Цель упраж ­
После успешного завершения этого упражнения вы будете в СОСТОЯНИИ
нения
выполнить следующие операции :
•
программирование простых лorических команд;
•
выполнение простых функций переключения ;
•
•
выполнение определяемых траекторией функций п ереключения ;
программирование зависящих от сигналов функций ожидания .
НеоБХОДИ МЬl е
Чтобы успешно завершить это упражнение , требуется следующее :
у слови я
•
теоретические знания о программировании простых логических команд;
знания о простых функциях переключения ;
знания о простых импульсных функциях :
знания о зависящих от траектории функциях переключения ;
знания о зависящих от траектории импульсных функциях;
знания о функциях ожидания .
П о стан о в к а
Выполнить следующие задачи : программирование логмки контура дета­
задач
ли 1 с нанесением клея .
1.
Создать копию программы Деталь1_СОNТ с имен ем
Ко нтур_нанесен ия_кл ея .
KUKA
KUKA
п ограмми ование робота'
Расширить логическую функциональность программы следующим
2.
образом :
Перед покидэнием положения НОМЕ ПЛК должен передать сиг­
нал деблокировки (ВХОД 11 ).
За 0,5 секунды до достижения детали соплом ДЛЯ нанесения клея
последнее ДОЛЖНО быть активировано (ВЫХОД 13).
При переходе от ПЛОСКОСТИ в изгиб деталидолжнз переключиться
сигнальная лампа . которая повторно погаснет при переходе от
изгиба в плоскость (выход 12).
За 0,75 секунды ДО покидания детали сопло ДЛЯ нанесения клея
должно быть повторно дезактивировано ( ВЫХОА 13).
За 50 мм ДО конца обработки детали ПЛК должен ПОЛУЧИТЬ сооб­
щение о готовности . Сигнал ( выход 11) ДЛЯ ПЛК должен пода­
ваться в течение 2 секунд .
З.
Проверить программу согласно предписанию .
-
•
...
-.
®
•
Ри с . 7-27: Входы и выходы : нан есение кл ея
1
Контур детали 1
2
3
Отсчетная база
4
Направление перемещения
Начальная и конечная точки
детали
5
Переход плоскость - изгиб
7
Точка перед концом детали
6
Переход изгиб
плоскость
В опросы к у пражне ни ю
1. В чем закnючается различие между командами OUT и OUT CONT? ЧТО
следует учитывать 7
2. Чем отличаются друг от друга команды PULSE и OUT?
з . Когда следует использовать команды SYN
OUT?
4 . Существуют ли ограничения дnя команд маршрута SYN OUT в СВЯЗИ С
программированием перемещения?
7 Иcnoп .. ]Qeание П(N"М"еских
~I"'" 11 npor а ...... е робота
5. Какая оп асность существует при использова нии команды WAIT fOR с
командой CONT?
KUKA
KUKA
п
ClГ
aMMI1 Оlilдние
обота 1
806 аще .. ..е с пе е"'е .... ы"' ...
8
Обращение с переменными
8.1
Обзор
в этом учебном разделе рассматриваются следующие элементы:
8.2
•
индикация и изменение значений переменных ;
•
запрос состояний робота .
Индикация и изменение знач е ний переменных
Обзор
переменных
Переменные - подста новочные символы для расчетных величин (з наче­
ний) , которые воз н икают в ходе процесса расчетов. Переменные разли ­
чаются местом хра н ения , типом, названием и содержимым.
рис . 8-1: Обозначения переменных
Место хранения переменной крайне важно для ее действительности .
Гл об альная переменная хранится в системных файлах и действительна
во всех прorpаммах . Локальная переменная хр анится в приложении и ,
таким образом , действительна (и может считыват ься только в этом слу­
чае ) только в запущенной программе .
При меры используемых переменных :
Переменная
Место хранения
Тип
Имя
Значени.
Текущий инс-
Глобальная ; сис-
Целое
$АСТ_Т
трумент
темная п еременная
число
OOL
5
KUКA
Текущая база
Глобальная ; сис-
Целое
$АСТ_В
темная переменная
число
ASE
zaehler
3
$SoftNEnd[2[
-10.5
stoerung
!ru.
12
KUКA
СЧe-NИКИ про-
Локальная ; прило--
Целое
Д УКЦИИ в шту-
жение
число
Отрицатель-
Глобальная ;
Десяти -
ное значение
machine.dat
чное
ках
угла ДЛЯ про-
число
rpaMMHoro
конечного
выключателЯ
оси 2
Состояние
Глобальная ; напр .,
Значе-
ошибки
в файле config .dat
ни.
«истинн
О"
«ложно»
KUKA
KUKA
п
r 3 ...... '" ова""е
обо~а 1
ДОС1УПНОСТЬ И
Место хранения переменной крайне важно ДЛЯ ВОЗМОЖНОСТИ индикации
деЙствитеш.
переменной :
НОСТЬ
•
глобальная: если переменная является глобальной , ее можно вы­
переменных на
вести на экран в любой момент. В таком случае переменная должна
индикации
храниться в системном файле (напр . , config.dat, machine.dat) или в
локальном списке данных в качестве глобальной переменной ;
•
локальная: в сл~ае с локальными переменными различают локалЬ­
ные переменные в файле программы (.зге) или локальные перемен­
ные в списке данных ( •.dat). Если переменная обозначена в файле
.sre, то она существует только во время работы программы . В ЭТОМ
случае говорят о временной переменной . Если переменная указана
локально в файле .dat, то хотя она также известна только в соответс­
твующей прorрамме, ее значение сохраняется после отмены выбора
программы.
Индикация и
В главном меню выбрать пункт Индикация> Переменная > По отде­
1.
льности.
изменение
Откроется окно Индикация переменных по отдельности .
значения
переменной
2. 8 поле Имя ввести имя переменной.
З.
Если выбрана какая-либо программа, в поле Модуль будет автома­
тически указана эта программа.
Если требуется вывести на экран переменную из другой программы ,
указать программу следующим образом :
IR1/нэзвэнuе прогрэммы.
Не указывать папку между /R1/ и именем программы. В имени про­
граммы не указывать расширение файла.
Нажать клавишу ввода.
4.
В поле Текущее значение будет показано текущее значение пере­
менной. Если ничего не показано, то переменной еще не было при­
своено какое-либо значение .
5.
В поле Новое значение ввести нужное значение.
6.
Нажать клавишу ввода.
В поле Текущее значение будет "оказано новое значение .
. : , ,0 · ·1,,/
' 1
"
о
Н овое зн.JI~ ;
-
,,_ .. -
3
Рис. 8-2: Окно Индикация переменных по отдельности
Поз .
Описание
1
Имя переменной , КОТОРУЮ следует изменить.
2
Новое значение , которое следует присвоить переменной .
I
4
8 Of>ращение с пе е ... ениы",,,
•.
Описание
3
Программа , в которой выполняется поиск переменной .
па
В случае с системными переменными поле Модуль не имеет
значения .
Это поле имеет два состояния :
4
• И : показанное значение не обновляется автоматически;
"
•
tJ : показанное значение автоматически обновляется .
Переключение между состояниями :
•
•
8.3
нажать кнопку Обновить ;
альтернатива : Shift
+ Enter.
Запрос состояний робота
Внутренние
Посредством запроса внутренних системных значений можно получить
системные
большое количество информации о состоянии робота. Эти значения
значения
можно запросить в любое время .
Ш
I
В случае с внутренними системными перемеНН!:.IМИ
говорят о системных переменны •.
В качестве пврвмвнной понимают зарезервированную ячей ку па
мяти . Эта ячейка памяти (также « подстановочный симеол для значе­
ний») всегда имеет имя и определенный адрес в памяти компьютера .
Для запроса состояний робота доступны, помимо прочих , следующие
системные переменные :
•
счетчики времени (таймеры) ;
•
маркеры (п ризнаки) ;
•
счетчики ;
•
входные и выходные СИl11алы (IN/OUT) также управляются в качестве
системных переменны х.
Системная пере-
Пример ИСПОЛbЭOВSния дnя запроса
менная
$TIMER[1-64)
Проверка еремени ожида ния робота (охлаждение деталей , время ожидания из-за длитель-
ности процесса и т. д .) .
$FLAG[1-1024)
$CYCFLAG[1-256)
Признаки (маркеры), которые были установлены е определенном месте программы , также
можно опросить вне программы (глобал ьно ).
Кроме того , цикли ческие флаги также оцениваются в течение длительного времени .
1[1 20)
Счетчик, который считает шаги обработки .
$IN[1-4096)
Проверка открытого или закрытого состояния
захвата (датчики захвата сообщают о состоянии
посредством входного сигнала).
$OUTj1-4096)
Провер ка команды захвата ( выходной сигнал
передает команду исполнительным элементам
захвата).
Особенности
Системные переменные KUКA всегда начинаются с символа «$». Сис­
системных
темные переменные всегда можно опросить , так как они всегда дей ст ви­
переменных
тельны . Местом хра нения служат глобальные с писки данны х:
KUKA
KUKA
п ог аММI1 OBaH~e
Индикация
систе мной
обота 1
Порядок действий ДЛЯ индикации приэнаков, счеТ'-lИКОВ и таймеров :
•
информации
В главн ом меню вы брать ПУНКТ Индикация > Переменная .
Теперь ДЛЯ выбора ДОСТУПНЫ различные системные переменные:
циклические признаки;
признак и;
счеТЧИkИ;
таймеры.
ПОРЯДОК действий ДЛЯ индикации ВХОДОВ и ВЫХОДОВ:
•
В главном меню выбрать П УНКТ Индикация> Входы/выходы> циф­
ровые выходы или Цифровые ВХОДЫ .
8.4
Упражн е ни е: индикация системных переменных
Цел ь у п ра ж­
После успешного заверwения этого упражнения вы будете в состоянии
нени я
выполнит ь следующие операции :
Н еобходимы е
усл о вия
П остан о в ка
зада ч
•
открытие индикации переменных ;
•
индикация системных переменных .
Чтобы успешно завершить это упражнение , требуется следующее :
•
теоретические знания об и ндикации системных переменных ;
•
теоретические знания о системных перем енных .
Выполнить следующие задачи :
1.
2.
Открыть индикацию переменных.
Вывести н а экран текущее положение Home ( имя переменной :
ХНОМЕ ).
3. Вывести на экран текущее положение робота (имя п еременной :
$pos_act).
4.
Определить п оложение програм м ных ко н ечных выключателей для
осей 1-3 робота ( имя переменной : $softn_end[OCb] и $softp_end[ocb)).
5.
определить значение указател я предварительн ого выпол н ен и я ( имя
переменной : $advance).
160/191
..
9 ИCnОПЬ]ОВilНИI! Тl!хнолоrичес.:их Лlкетов
9
Использование технологических пакетов
9.1
Обзор
в этом учебном разделе рассматриваются следующие элементы:
9.2
•
управление KUКA . GripperTech ;
•
программирование с KUКA. GripperTech ;
•
конфигурирование KUКA.GripperTech .
Управление захватом с KUКA.GrlpperTech
Технологи-
KUКA . Gripper & SpotТech - это технологический пакет с возможн остью
ческии пакет
догрузки . Он у п ро щает испол ьзование захвата в отно шении:
KUКA.GripperTec
Для управления захватом требуются следующие клавиши состояния :
h
Клавиша cocroяния
I~
1
@:
Описание
Выбрать захват .
Будет показан н о мер захвата :
•
нажатие на верхнюю клавишу увеличит числа-
•
нажатие на нижнюю клавишу уменьшит число-
вое значение ;
вое значение .
Переключение между состояниями захвата (напр .,
открывание или закрывание).
1[5:
Текущее состояние не показывается . Возможные
состояния зависят от настроенного типа захвата.
Для сварочных клещей: возможные состояния зави-
сят от конфигурации ручного управления клещами .
Порядок
деиствий дпя
УВЕДОМЛЕНИЕ
управления
ния .
захватом
Перед у правл ением захватом с помощью клави ш
состояния следует активировать клавиши состоя
В главном меню выбрать пункт Конфиryрация > Клавиши статуса >
GripperTech .
I&.. ОСТОРОЖНО I Предулр.,...
•••• '
При обращении с системои захвата существует
опасность защемления и отрезания . Лицо , управляющее захватом ,
должно убедиться , что захват не может защемитъ какую-либо часть те­
па.
1.
Выбрать захват нажатием на клавишу состояния .
2.
Активировать режим работы Т 1 или Т2 .
з.
Задействовать клавишу подтверждения .
KUKA
KUKA
n ог aM"'~ o~aH"e
оБОТд 1
4.
9.3
Управлять захватом с помощью клавиши состояния .
Программирование захвата с помощью KUКA.GripperTech
Программиро­
с ПОМОЩЬЮ технологического пакета KUКA.GripperTech можно запрог­
ванне команд
раммировать команды захвата посредством предварительно ПОДГОТОВ­
захвата
ленных встроенных формуляров прямо в выбранной программе. Дпя
выбора доступны две команды :
SET Gripper: команда дnя открывания/закрывания захвата в про­
•
грамме ;
СНЕСК Gripper: команда ДЛЯ проверки состояния захвата .
•
Фун кции
программиро­
Команда захвата во время перемещения
Возможно запрограммировать команду захвата таким образом , что­
•
бы эта команда выполнялась относительно начальной или конечной
аания захвата
точки .
Для этого ВО встроенном формуляре привести в действие ТОЛЬКО за­
•
пись CONT и указать длительность задержки в мс (Задержка).
•
START
• "11-8_..
~
~
Dela~
. I
Del~(·-""••_... пе.1 ~'
oSltlve,
......
-----.
END
Рис. 9-1: Схема задержки
I&. ОСТОРОЖНО I Команду захвата с обработкой во время переме
1·'=:"':0.::.:..::..:...:::=:.:..::.J· щения следует выбирать с осторожностью , пос­
кольку при ее необдуманном применении возможно травмирование
персонала или материальный ущерб из-за летящих деталей или столк­
новений.
Настройки захвата при точном останове
•
+
Рис. 9-2: Настройка захвата
•
Использовать контроль захвата:
см
9 ИСnOЛЬ~08аНI4f! теXliОnOГИ'!еСХИХ I1IiIKI!T08
если КОНТРОЛЬ захвата активирован с помощью кнопки екл
.. вы­
полняется опрос заданных даNикое ;
при отсутствии обратного сообщения от даNИКОВ следует ошибка
истечения времени с возможностью моделирования даNика в
тестовом режиме;
если контроль захвата дезактивирован нажэтмем на кнопку OFF ,
то выполняется ожидание
8 теченив заданного времени перед
продолжением вы п олнения прогрэммы .
Порядок
действий дnя
программиро­
вания захвата
Порядок действий
1. Выбрать последовательность меню Команды > GripperTech >
Gripper.
2.
Во встроенном формуляре установить параметры.
3.
Сохранить данные , нажав кнопку Команда ОК .
~
срср
с?
1
SEТГ- ; SUte-8 EJ .В DNV- ~~
Рис. 9-3: Встроенный формуляр ((Захват со сглаживанием))
Рис . 9-4: Встроенный формуляр ((Захват без сглаживания))
1lo3.
1
2
Описанив
Выбрать захват :
•
для выбора доступны все настроенные захваты .
•
количество зависит от типа захвата ;
Выбрать состояние переключения захвата :
• обозначение таюке зависит от конфиryрации .
3
Обработка в предварительном выполнении :
• CONT: обработка во время перемещения ;
•
4
(пусто]: обработка с остановом предварительного ВЫПОЛнения .
Попе доступно только при выборе CONT.
• START
• END:
действие захвата выполняется в начальной точке
перемещения ;
действие захвата выполняется в целевой точке пе-
ремещения .
5
Поле ДОСТУПНО только при выборе CONT.
Установить время ожидания , с которым выполняется действие захвата относительно начальной или целевой точки перемещения :
в
• -200-200
МС .
Набор данных с параметрами захвата .
KUKA
KUKA
n
r
эмми
Olla~l<e
ооота
1
., +
--+G
1...
- - -.......
1
Рис. 9-5: Настройка захвата
Поз.
1
Описание
Время ожидания , после которого продолжается запрограммир ова нное перемещение:
2
• 0-10
с.
Контроль захва та :
• OFF ( п о умолчанию):
ожидание в течение установленн о го
выше времени;
•
9.4
ОН : ожидание датчиков .
Конфиryрация KUКA.GripperTech
Возможности
KUКA. GrippeгTech п озволяет самостоятельно конфиryрировать захват.
конфигуриро­
Дпя этого доступны пять предварительно о пределенных типов захвата .
вания и типы
Кроме того, можно устан овить о пределяем ые пользователем захваты.
захвата
УВЕДОМЛЕНИЕ
Можно установить ДО 16 различных захватов в
системе у правлен ия.
Типы захватов
Тип
OUТ
Тип 1
2
IN
4
СОСТОЯНИЯ
Пример
2
Простой захват с функциями открывания и
закрывания
Тип 2
2
2
3
Каретка с промежуточным положением
Тип 3
2
2
3
Вакуумный захват с
фУНКЦИЯМИ всасывания , выдувания и
выкпючения
Ти п 4
3
2
3
Анал о гичен типу 3, но
с тремя у правляющими выходами
Тип 5
2
4
2
Аналогичен типу 1, но
с импульсом в место
длительного си гнала
Свободный
С вободная установка
9 Испощ.зовзние теХНОГlог..,ческ",х na~eTOB
- - -- -+-0
Рис. 9-6: При мер: предопределенный захват
NOЗ.
1
Описание
Номер захвата :
1-16.
о
2
Имя захвата
Имя показывается во встроенном формуляре. Имя по умолчанию можно изменить :
1-24 символа .
о
3
Тип
о
Для предвари тельно о пределенных захватов: 1-5 (см . таблицу «Ти пы захватов»).
4
Обозначение типа захвата (обновляется только после сохранения).
Обозначение изменить невозможно .
5
Присвоение но меров выходам
Выходам . которые не задействованы , можно присвоить «О».
Таким образом можно сразу определить , что они не ис пользуются . Если им будет присвоен номер, то это не окажет никакого воздействия .
..
KUKA
киКА
Поз.
6
Описан ие
Присвоение номеров входам
Входам , которые не задействова н ы , можно ПРИСВОИТЬ «о
•. Та-
КИМ образом можно сразу оп ределить , что они не ИСП ОЛЬЗУЮТся. Если им будет присвое н номер . то ЭТО не окажет никакого
воздействия.
7
Состояния п ерекnючения
Имена по умолчанию можно изменить. Имена показываются
во встроенном формуляре , если в нем выбран соответствуюЩ ИЙ захват.
Свободно
Чтобы учесть все требования п ользователей, в программу б ыл встроен
программм·
свобоДНО п рограммируемый ти п захвата . ПосреДСТВОМ за п исей в фай л ах
руемыетипы
захваТО8
$CONFIG. DAT, U SERGRP.DAT и USER_GRP .SRC можн о создать СКОЛ Ь­
КО у годн о полн остью настраиваемых захватов.
УВЕдОМЛЕНИЕ
Дополнительная информация о конфигурирова
нии захватов приведена в Инструкции по обслу­
живанию KUКA System Тесhпоlogу KUКA. Gripper&Spotтech 3.0.
Порядок
Конфигурация с предварительно определенным ти п ом захвата
действий ДЛЯ
1.
КОНфигуриро­
вания захвата
В главном меню выбрать пункт Конфигурация > Входы/выходы >
Захват . Откроется окно.
2.
С помощью кнопо к Далее или ПреДl:olДYщ"" выбрать нужный номер
захвата .
9.5
3.
П ри необходимости изменить имя захвата по умолчанию .
4.
5.
Присвоить захват одному типу между 1 и 5.
6.
П ри необходимости изменить имена состояний по умолчанию.
7.
Сохранить конфигурацию нажатием на кнопку Изменить.
П рисвоить входы И выходы .
Упражнение : программирование захвата с табличкой
Цел ь упраж­
После успешного завершения зтого упражнения вы будете в состоянии
нени я
выполнить сл едующ ие операции :
•
программирование ком анд для управления и п роверки захвато в и
клещей ( KUКA. Gripper и SpotТech ) ;
•
Н еобходимые
условия
активация и работа с тех нол огическими кnавишами состояния .
Чтобы у спешно завершить это у пражнение , требуется следующее:
•
теоретические знания о техн ологичес ких па кетах KUКA. Grippe r и
SpotTech.
П ост анов ка
зада ч
Выполнить следующие задачи : П однять и уложить таблич ку .
1.
Создать новую прorрамму с именем Подним а ни е_таблич к и ; при
этом использовать инструмент . Захват» и синюю базу.
2. Обучить процесс поднятия таблич к и таким образом , чтобы были соб­
люден ы при веденные на рисунке (>>> Рис . 9-7 ) положения у клады­
ва ния и подн ятия .
3.
Проверить програм м у в режи м ах Т1 , Т2 и «двтоматика ,. . Следует
соблюдат ь п равила техни ки безопасности в р ам ках инструктажа .
4 . Создать вторую программу с и менем Укладывание_таблички . И с­
пользовать при этом нужную базу и соответствующий инструмент .
9 ИCnОПЬЭОВ3НI'е те~ .. опогИ'<еCkИХ ",,~eTOfl
5. Обучить процесс укладывания таблички .
6. Проверить программу в режимах П , т2 и «Автоматика » . Следует
соблюдать правила техники безопасности в рамках инструктажа .
7.
Архивировать про граммы .
Рис . 9-7: Табличка с положением укладки
1
Табличка
2
Положение укладывания
Что следует знать сейчас :
1. Когда следует ПРОВОДмть инструктаж по технике безопасностм ? (не ме­
нее 4 ответов)
2. Что представляет собой устройство свободного вращения на роботе
KUКA?
KUKA
KUKA
n or амми ование
9.6
060та 1
У праж н е ние : програ ммирование захвата со штифтом
Цел ь упраж­
После успешного заверше ния этого упражнения вы будете в СОСТОЯНИИ
н е ния
выполнить следующие операции :
•
программирование команд ДЛЯ управления и п роверки захватов и
клещей (KUКA . Gгipper и SpotТech) ;
активация и работа с технологическими клавишами СОСТОЯНИЯ .
•
Н еобходи мые
Чтобы успешно завершить это упражнение , требуется следующее :
усло в ия
•
теоретические знания о технологических пакетах KUКA. Gripper и
SpotТech .
П оста н овка
Выполнить следующие задачи : поднимание и опускание штифта 1.
з ада ч
1.
Создать две новые про гра м мы с именем Поднима н и в_wтифт а 1 и
Опу с ка н и е_штифта1 (дубл ирование) .
2.
При програ м мирое аНI1 И исп ол ьзовать преимущества направления
удара и н стру ме нта в п е ре ме щен ии вручную .
З.
Следить за тем , чтобы скорость перемещения при поднимании и
опускании 8 магазин со штифтами не превышала 0.3 м/с .
4.
Перед подн и ма ни ем штифта создать контроль н ый запрос относи­
тельно положения захвата .
Ри с. 9-8: Магаз ин со штифтами
1
Магаз и н со штифтами
2
Штифт 1
3
Штифт2
4
ШтифтЗ
Что сл еду ет з н ать се й ч ас :
1. В чем заключается различие между временем ожида н ия с вкnючение м
и выключ е ние м контроля захвата?
2. Н а экране показано информационное Сообщен ие с тексто м
Сглаживание невозможно. Н азвать возможные прич и ны для этого .
KUKA
з . Сколько стандартных типов захвата KUКA существует?
KUKA
1701191
n
r а ......,.. 08<1HYle РО150та 1
..
10 Ycnew"oe n ОГ а......
10
Успешное проrраммирование в KRL
10.1
Обзор
801""" 8 KRL
в этом учебном разделе рассматриваются следующие элементы:
10.2
•
•
структура прогрзмм робота ;
•
связывание программ робота .
создание структуры программы робота;
Структура программ робота
Контроль
выполнения
программы
Помимо простых команд перемещения и команд связи (функции пере­
ключения и ожидания) в программах робота находится большое количес­
тво процедур , которые служат для контроля выполнения программы . К
ним относятся:
•
циклы : циклы - контрольные структуры . Они повторяют блок ком анд
до тех пор, пока не будет выполнено у словие прерывания :
бесконечные циклы ;
циклы с подсчетом ;
отклоняемые и неотклоняемые циклы ;
•
переходы : с помощью переходов можно назначить вып ол нение раз­
делов программы только при определенном условии :
условные переходы ;
многократные переходы.
БесконеЧНЬIЙ
цикл
Бесконечный цикл повторяет блок команд бесконечно часто . Цикл можно
покинуть с помощью преждевременного прерывания (с помощью функ­
ции EXIT).
LOOP
РТРРI
РТРР2
ENOI.OOP
Рис. 10-1: План выполнения программы: бесконечный цикл
Примеры команды LQOP :
•
без EXIT:
команды перемещения в точки Р1 и Р2 выполняются в течение дли ­
тельного времени ;
KUKA
KUKA
п
r 8ММИ
ова><ие
обота 1
'"''''
РТР
Р1
РТР
Р2
v e l _ 100% PDATl
Vel.l00% РОАТ2
...,LOO.
•
с EXIT:
команды перемещения в точки Р1 и Р2 выполняются ДО того, пока
ВХОД 30 не перекnючится на значение TRUE.
LOO'
РТР
Р1
РТР Р2
П'
Vel _ 100% УОЛТl
Vel . l00'
РОАТ2
$IH[30] •• 'l'RtJZ 'l'IIIDf
ВХIТ
.,.,,.
КNDLOO'
Цикл с
с помощью цикла с подсчетом (цикла FOR) можно повторить команду оп­
подсчетом
ределенное число раз . Количество ПРОХОДОВ управляется числовой пе­
ременной.
ЮUТ(iJ
mt.JE
ENDFOR
Рис. 10-2: План выполнения программы: цИКN FOR
При мер цикла FOR: ВЫХОДЫ 1-5 переключаются друг за ДРУГОМ на значе­
ние TRUE. Для подсчета ПРОХОДОВ внутри цикла используется целочис­
ленная (целая) переменная «i».
INT i
J'OR i-1 ТО 5
$OIl T {i j - TRII E
...",,.
Отклоняемый
ЦИКЛ VVНILE - отклоняемый цшm или цикл с предварительной проверкой,
цикл
при котором проверяется услоаие прерывания до того, как будет выпол­
нена часть цикла с командами .
10 Успешное n
f
1IМUИ
111Iние 11 KRt
""ILE
Рис. 10-3: ПЛаН выполнения программы WHILE
При мер цикла WI-IILE: выход 17 принимает значение TRUE , выход 18 пе­
реключэется на значение FALSE, а робот перемещается в положение
Нomе только в том случае , если к началу цикла было в ыполнено условие
( вход 22 = TRUE).
~LZ
$IN[22J--TROE
$(ЮТ[17j -ТRОЕ:
$ООТ [18] - FALS,"
"""""'...
РТР
НеотклоняеМ"'IЙ
цикп
НОНЕ
ЦИКЛ REPEAT - нвоmклоняемый цикл или цикл с последующей проевркой,
при котором усло в ие прерывания проверяется только после того, как
была выполнена часть цикла с командами .
KUKA
KUKA
п
or амми ование
обота 1
АЕРЕАТ
$OUТ(171 .. TRUE
SOUТJ18)-FALSE
РТРНОМЕ
Рис. 10-4: ПЛан выполнения программы REPEAT
Пример цикла RЕРЕАТ: выход 17 принимает значение TRUE, ВЫХОД 18
переключзется на значение FALSE, а робот перемещается в положение
Ноте. Лишь после этого проверяется условие .
R.ВPEAT
$OUT[17j - ТRUЕ
$OUT[18]-FALSE
РТР
Н ОНЕ
UНТXL $IN{22j --ТRUЕ
Условный
Усnовный nереход (запрос IF) состоит из условия и ДВУХ разделов команд.
переход
При выполнении условия обрабатывается первая ком анда . Если усло­
вие не выполнено , выполняется вторая ко манда.
Однако запрос IF предлагает альтернативы :
•
Второй раздел команд может быть пропущен : запрос IF без ELSE.
Вследствие этого при невыполнении условия непосредственно после
перехода программа продолжает работу .
•
Несколько запросов IF MOryт быть вложены друг в друга
(многократный nврвход): запросы обрабатываются по очереди , пока
не будет выполнено какое-либо условие.
10 Успешное n
ПЕН
ааЕ
РТРР3
РТРР4
r д~~~
ванне в KRL
ЕНо.
Рис. 10-5: План выполнения программы : переход IF
Пример запроса IF : если условие выполнено (ВХОД 30 Должен иметь зна­
чение TRUE), то робот перемещается в точку Р3 , в противном случае - в
точку Р4 .
х.
SIN ( З Оj -- ТRU Е
.....
Е'ТЕ'
Е'З
>ТР
..
THEN
""""
Распределитель
Переход SWITCH является распрвдвпuт&п&м ипи многократным
пврвходом. Сначала здесь оценивается выражение . Затем значение это­
го выражения сравнивается с значением одного 1013 разделов случая
(CASE). При совпадении выполняются указания соответствующего слу­
чая.
..
KUKA
KUKA
Проrра ........
08a.. ~e
,а 1
.
t
",,",,1
РТР",
.
САа""
СМ"'
РТРР6
РТР
•
QEFAULT
"""'_МSG
EНDSWIТCH
~
Рис. 10-6: План 8ыоnненияя программы: распределитель SWITCHCASE
Сначала цеЛQчисленная "еременная (целое) с именем «status» проверя­
ется на значимость . Е сли значение переменной равно «1 », выполняется
случай 1 (CASE 1): робот перемещается в точку Р5 . Если значение пере­
менной равно «2», выполняется случай 2 (CASE 2) : робот перемещается
в точку Р6 . Если значение переменной не указано н и в ОДНОМ И3 случаев
(8 даННОМ случае все значения , кроме «1» и «2 »), то выполняется ветвь
DEFAULт: сообщение об ошибке.
I NT :o.tatus
SWITCH зtаtuз
CASE 1
РТР
С АЗЕ
Р5
2
рт р
Рб
DEFAULT
ERROR_HSG ()
ЕNDSWIТ<;:Н
10.3
Соэдание структуры програММbI робота
Возможности
ДЛЯ структур..,·
рования
программы
робота
Структура п рограммы робота - важн ый фактор дл я ее качества . Чем
структурированнее программа , тем она понятнее , эффективнее , проще
ДЛЯ чтения и экономичнее . Чтобы обеспечить структурность программы ,
можно использоват ь следующие средства:
•
комментирование : комментарии и штампы ;
•
вставка : пробелы ;
•
затемнение : формуляры ( <<складки » ) ;
•
модульность : подпрограммы .
Комментарии и
Добавление комментария позволяет ввести текст е программу робота ,
штампы
который предназначен только для человека , читающего текст п рограм­
мы . Этот текст не считывается интерпретатором робота . Текст предна­
значен лишь для повышения читаемости программы .
10 Успешное n ог 3ММ\\ OBaH~e в KRl
Комментарии могут использоваться в программа х робота во многих от·
ношениях:
информация о тексте программы: автор, версия , дата составления;
•
~ l ding1 (
1
OEF
2
JACK SPARROW
; Uersion 1 . 5 (10/18/2810)
lHI
3
11
;
)
Progra~d Ьу
5
Рис. 10-7: Пример комментария: информация
•
разделение текста програ ммы: прежде всего , посредство м исполь·
зования графических средств (специальных знаков #, *, -);
7
8
IHIТ
;**** •••••••• *lnitialisation************
9
BASISТECH
IHI
Г"
Рис. 10-8: Пример комментария: разделение
•
выделение в качестве комментария (уровень «Экс перт» ) : посредс·
твом установки точки с запятой в начале програ мм ной строки эта
строка обозначается в качестве комментария, т. е. текст распознает·
ся в качестве комментария и не обрабатывается в качестве части
програ ммы;
11
РТР
12
13
;$ОUТ[ЗЗ]-ТRUЕ
АОТОЕХТ IHII
11,
НОМЕ
Uel~
100 % DEFAULT
, ППП
Рис. 10-9: Пример комментария: выделение в качестве комментария
•
пояснения к отдельным строкам ,
а таюке указание на требуемую работу: обозначение недостаточ·
ных частей программы .
"
18
19
CASE 1
РОВ (.EXT_PGНO~IPGНO_ACKH.DHY[] . O
)
1. Progr • Но. -Request
20
Hain_Prog ( ) ; Call
Reset
User-Рrо gr аQ
Рис . 10·10: Пример комментария: пояснения
УВЕДОМЛЕНИЕ
добавление комментариев имеет смысл только в
то м случае , если подцерживается их актуаль·
ность. Крайне важно , чтобы за изменениями указаний следовало обнов·
ление комментариев.
Можно использовать три различных типа комментариев:
•
установка точки с запятой (уровень «Эксперт»): посредством уста­
новки точки с запятой (<<;») дальнейшая часть строки определяется в
качестве комментария;
•
вставка встроенного формуляра « Комментарий »;
KUKA
KUKA
Рис. 10-11: Встроенный формуляр комментария
I Поз. IОписание
вставка встроенного формуляра « Штамп »: эдесь дополнительно до­
•
бавляется отметка времени . Кроме ТОГО, МОЖНО указать имя редакто­
ра .
,!~ ,! -~~ I Е~t-~:~..~
Рис. 10-12: встроенный формуляр штампа
Поз .
Порядок
1.
2.
2
3
Системное время (не редактируется )
4
Произвonьный текст
Имя или идентификатор пользователя
Выделить строку , после КОТОРОЙ должен быть вставлен комментарий
Выбрать последовательность меню Команды::> Комментарий>
нормanьный и ли Штамп .
комментариев и
wтампов
Системная дата ( не редактируется)
или штамп .
действий дпя
добавления
Описание
1
З.
Ввести нужные данные . Если ранее уже были добавлены коммента­
рий или штамп , то 80 встроенном формуляре будут указаны эти же
данные.
При вводе комментария МОЖНО ОЧИСТИТЬ поле с помощью КНОПКИ
НОВЫЙ текст , чтобы ввести новый текст.
При установке штампа можно изменить системное время с помо­
щью кнопки Новое время , а также очистить попе Имя с помощью
кнопки Новое имя .
4.
Сохранить да нные, нажав кнопку Команда ОК .
Вставка
Встаека программных строк - эффективное средство повышения читае­
программных
мости nporpaMMbl робота . Таким образом разъясняется взаимодействие
строк
ком п он ентов программы .
10 Успешное n
14
15
LOOP
РВ'
(IEXT_PCНO.IPGНO_GET.DНY[].U
)
SWITCH PGНO; Select with Progra~u.oer
CASE 1
РО. (IEXT_PCНO,IPCНO_ ACKH,DМY[] , . )
~in_Prog ( ) ; Call User-Progra~
CASE 2
16
17
18
19
20
21
22
23
РОО (IEXT_PGНO.IPGНD_ACkH.DНY[].D
SUb_Prog1 ( ) ; Call
)
User-Progra~
DЕFйULТ
2_25
26
81J1J"РОllilИ_ 11 KRL
Р.' (IEXT_PGНO.IPGНD_FAULT.DНY[] .1 )
EНDSWITCH
[::НD L OOP
Рис. 10-13: Вставка программных строк
УВЕдОМЛЕНИЕ
Эффект вставки являетс я исключительно визу
альным . В ставленные ча сти программы при вы·
полнени и прогр а ммы обрабатываются точно так же , как и не являющи­
еся вставленными .
Скрытие
Язык програ ммирования робота KUКA поддерживает возм ожность объ­
программных
единения и скрытия программных строк в формулярах. Таким образом
строк с
помощью
формуляров
части программы становятся невидимыми дnя пользователя : это уп ро­
щает чтение программы . Формуляры можно открыть и обработать в груп ­
пе пользователей «Эксперты~ .
'"
10
15
16
СНЕСК
НОМЕ
Рис. 10-14: Закрытый формуляр
15
СНЕСИ
16
17
18
19
НОНЕ
$Н POS - XHOМE
lF
CHECK_HOНE -- TRUE
Р"
ТНЕН
(8СНК_НОНЕ.8РСНО_СЕТ.DНУ[].'
EНDIF
Рис. 10-15: Открытый формуляр
Цветная маркировка формуляров:
Цвет
Описание
Тем но-красный
Закрытый формуляр
Светло-крас-
Открытый формуляр
ный
Темно-синий
Закрытый подформуляр
Светло..с;и ни Й
Открытый подформуляр
Зеленый
Содержание формуляра
)
;Test HPos
KUKA
KUKA
n
оrра ...... и
10.4
Q8ание робота 1
Связывание программ робота
Техника подпро­
Техника подпрограмм обеспечивает модульность и эффективность
грамм
структуры программ робота . Цель заключается не в ТОМ, чтобы записать
все команды в одну прогрэмму, а сохранить определенные процедуры,
расчеты или процессы в отдельных программах.
Использование подпрограмм предоставляет огромное количество
преимуществ:
•
структура главной программы становится панятной , а ее считывание
облеrчается, поскольку уменьшается дnина программы;
•
подпрограммы можно разрабатывать отдельно друг от друга: МОЖНО
разделить объем программирования и снизить количество ИСТОЧНМ
ков ошибок;
•
подпрограммы можно многократно использовать повторно .
е целом, различают два типа подпрограмм:
•
глобальные подпрограммы;
/
/'
Main
---
РГО9_1О
РГО9_4О
1
----,
kr
ILШI.tJ
РГО9_2О РГО9_30
./
----
I1
.-
РГО9_1О
/
/
Рис. 10-16: Пример схемы для глобальных подпрограмм
Глобальная подпрограмма - самостоятельная программа робота, ко­
торая вызывается из другой программы робота. Переход между про­
граммам и может выполняться в эависимостм от требований, т . е. в
одном случае программа может представлять собой главную про
грамму, а в другом - подпрограмму .
•
локальные подпрограммы.
10 Успешное f1
ог aMM~ 08al<~e 8 KRL
Рис. 10·17: Схема: локальные подпрограммы
Локальные подпрограммы - программы , которые встроены в главную
программу , т . е_ команды содержатся в том же файле SRC. Соответс·
теенно , координаты точки подпрограммы сохраняются в том же фай­
ле Dдт.
Ход вызова
подпрограммы
Каждая программа начинается со строки DEF и заканчивается строкой
END. При вызове подпрограммы в главной программе по умолчанию под­
программа обрабатывается от строки DEF до строки END. После дости­
жения строки END указатель выполнения программы перемещается
обратно в вызываемую программу (главную программу) .
2
3
"
5
6
7
8
9
11
11
12
13
14
'МI
РТР
Н ОМЕ
РТР
Р1
y~ 1 *
ртр
Р2 Уеl -11В ~_-.:
Y~1 - 1 al
111 , DEFAULT
, РОА11 Тоо l [2)
Р Т Р РЗ Ut'I- 110 1
2
3
4
5ub_ prog()
5
ОП Sub]rog( )
IMI
РТР Р1 Уеl -11 0 , РОА Т 1 Тооl[2]
aUT 25 " Statt'- lRUE
РТР Р4 Ut'I-100 \ РОА14 То01[2]
Р'Р PJt y~1 - 180 6
ЕНО
РIР Р5 Уе1 - 1 01 ~ . ~ " . ~
РТ Р
Р6 U~1 " 111
РIР
Н О НЕ
Уеl -
8i15~[ ~
2~J...._ _ _ _ _ __
~--~-
8а5е[2]
Ва5е{2]
' ~A(~J .. ... ->' ''t~J
\ РОА Т 6 Тооl{2]
110 \ DEFAULT
8а5е[2]
FHD
рис. 10-18: Ход вызова подпрограммы
УВЕДОМЛЕНИЕ
Чтобы преждевременно покинуть подпрограмму
(т. е . до строки END), можно запрограммировать
в подпрограмме команду RETURN. Считывание этой программной стро­
ки приводит к преждевременному прерыванию выполнения подпрограм
мы.
Порядок
Чтобы запрограммировать вызов подпрограммы , следует выбрать груп­
действий для
пу попьзователей «Эксперты» . Синтаксис для вызова подпрограммы :
вызова подпро·
Н а зван и е
граммы
1.
( )
В главном меню выбрать пункт Конфигурация> Группа пользова­
телей. Появится текущая группа пользователей .
2.
Для перекnючения на другую группу пользователей : нажать кнопку
Реrистрация .... Выделить группу пользователей Эксперты .
KUKA
KUKA
п
ог
aMM~ DBaH~e
та 1
з.
Ввестм параль kuka) и подтеердить его, нажав на кнопку Регистра­
ция.
Загрузить нужную главную программу в редактор нажатием на кнопку
4.
ОтКРЫТЬ.
'"
РТР
НОНЕ
Vel- 100% DEFADLT
РТР
НОНЕ
Ve l -
100% DEFAULT
5.
Установить курсор в нужную строку .
6.
Ввести имя подпрограммы с обеими скобками: напр ., myprog( ).
'"'
РТР
НОНЕ
Vel -
100\ DEFAULT
Vel~
100' DEFAIJLTC-_ _ _ _ _ _ __
m:yprog( )
~p
,
HQМE
7. Закрыть редактор с ПОМОЩЬЮ символа «Закрыты> и сохранить изме­
нения.
10.5
Упражн ени е: програ ммиро ван ие в KRL
цел ь упраж­
После успешного завершения этого упражнения вы будете в СОСТОЯНИИ
не н ия
выполнить следующие операции :
•
программирование бесконечных циклов ;
•
программирование вызовов подпрограмм ;
•
изменение программы CELL.$RC дЛЯ режима работы «Внешняя aB~
томатика» .
Н еоб ходимы е
Чтобы успешно завершить это упражнение , требуется следующее :
усл ов и я
•
знания об обращении с навигатором на уровне эксперта ;
•
основные знания о программировании на уровне эксперта (KRL);
•
знания о программировании подпрограмм и циклов ;
•
знания о структуре програм м ы CELL.SRC.
П останов ка
Выполнить следующие задачи :
з ада ч
1. Создать в режиме эксперта новый модуль с имене м Пр о цеду р а . Из
этой центральной праграммы выполняются все остальные програм
мы в качестве подпрограмм .
2. Точное выполнение программы приведено в плане выполнения про­
граммы . (» > Рис . 10~19 )
з.
Проверить новую программу Процедура в режимах Т1 , Т2 и «ABTO~
матика» . Следует соблюдать правила техники безопасности в рамках
инструктажа .
4.
Дополнить программу CELL.SRC следующим образом :
посредством отправки номера программы 1 uпифт достается из
магазина :
посредством отправки номера программы 2 вы п олняется отвод
от контура н а столе :
посредством отправки номера программы 3 uпифт возвращается
в магазин .
5. Проверить програм м у CELL.SRC.
10 Услешное n о
!I"''''~ oaaH~e е KRL
LOOP
IF SIN(121
THEN
ЕХП
ENDLOOP
Рис . 10-19: План выполнения программы : программа Процедура
Что следует знать сейчас :
1. Что озн ачают расши рени я фа йлов KUКA SRC и DАТ ?
2. Какой командой м ожно п ок и нуть бес ко н е ч н ы й ци кл?
з . Ка кой с и нтакс и с тр ебуется дпя распределителя ?
KUKA
KUKA
n or эмми ование
обота'
"
РаDDПI с системои
п а~пен"~ ~e хнего
11
Работа с системой управления верхнего уровня
11.1
Обзор
H~
В этом учебном разделе рассматриваются следующие элементы:
11.2
•
подготовка к запуску программы со стороны ПЛК;
•
настройка соединения с ПЛ К .
Подготовка к запуску программы от ПЛК
Робот в
Если процессами робота допжен управлять центральный пункт (у прав­
сочетании с
ляющий компьютер или ПЛК) , то это осуществляется по интерфейсу
установкой
«Внешняя автоматика» .
Рис. 11-1: Соединение с ПЛК
Принцип
Чтобы установить связь между KR С4 и ПЛК, требуется следующее :
структуры
•
установки
режим раБОТ!:.1 ((Внешняя автоматика» : режим работы , в котором
главный компьютер или ПЛК берет на себя управление системой ро­
бота;
•
CELL.SRC: организационная программа для выбора внешней про­
граммы робота ;
•
обмен сигналами между ПЛК и роботом : интерфейс ((Внешняя автоматика» дnя конфиryрирования входны х и выходных сигналов :
управляющие сигналы к роботу ( входы) : с игнал запуска и остано­
еа , номер п рограммы , квитирование ошибки ;
состояние робота (выходы) : состояние приводое , положения ,
ошибки и т . д.
Указания по
технике безопас­
ности для
внешнего
запуска
программы
После еыбора программы CELL следует выполнить перемещение SAK
KUKA
KUKA
I· &. ОСТОРОЖНО I. Перемещение SAK выполняется в качестве пере­
мещения РТР от фактического положения к целе­
вому положению , если выбранная запись перемещений содержит
команду перемещения РТР . Если выбранная запись перемещений со­
держит LIN или CIRC, то перемещение SAK выполняется в качестве пе­
ремещения llN. Наблюдать за перемещением во избежание
столкновений. При перемещении $дК скорость автоматически снижэ­
ется .
Если перемещение SAK уже было выполнено , то при внешнем запуске
перемещение SAK больше не будет выполняться .
1&
I
ОСТОРОЖНО в режиме внешней автоматики ХОД SAK отсутс­
I ',t.=!..:""'-""-'~"""'-J_ твует . Это значит, что робот после запуска выхо­
ДИТ на первое запрограммированное положение с за
программированной (не сниженной) СКОРОСТЬЮ и там не останавливает­
ся .
Порядок
действий ДЛЯ
внешнего
Необходимые условия
•
Выбран режим работы т1 или Т2 .
•
Входы и выходы ДЛЯ внешней автоматики и программы CELL.SRC
запуска
программы
сконфигурированы .
1.
В навигаторе выбрать программу CELL.SRC. Программа CELL всегда
находится в директории KRC;\R1 .
2. Установить коррекцию программы на 100 %. (Это рекомендуемая на·
стройка . ПРИ неоБХОДимости можно настроить другое значение) .
•
то
~
100%
""'.m
(ARCНМ:\)
•
src
НAl40LER on enefNII
Рис. 11-2: Выбор Cell" установка ручной коррекции
з.
1
Настройка HOV
2
Выбор Cell.src
Выполнить перемещение SAK;
нажать и удерживать переключатель подтверждения. Затем нажать и
удерживать клавишу запуска , пока в окне сообщений не появится со­
обще ние «SAK достигнут ,. .
4.
Выбрать режим работы «Внешняя автоматика» .
5.
Запустить про грамму через систему управления верхнего уровня
(ПnК) .
11 PaflOla с СИСН!МОИ
11.3
аеnения ее
xHero
оаня
Настройка соединения с ПЛК (Cell.src)
Оргаиизаци.
Для управления передаваемыми от ПЛК номерами программ использу­
оиная
ется организационная программа Cell.src. Она всегда находится в папке
программа
Cell.src
R1 . Как и любу ю обыкновенн ую программу , программу Cell также можно
индивидуально настроить , однако при это м должна сохраниться структу ­
ра прorраммы .
Структура и
фУНtЩИОНаль,
ность
программы Cell
1
ОН
6
1
lНIТ
CELL ( )
BASlSTECH IHl
8
СНЕСК
HOIE
9 - {>ТР НО НЕ
U@l - 100 , DEFAUL T
1 0 АОТОЕХ
Т
IHl
•...... ,........................................•...••..••..•."
11
, LOOP
12
13
,.
........................
®'
i .~.•.~..IJ!!;~1 .. ~~!!!!.•J!!'~I!!!.. ~~1.•~Jj'lIJ .•.9...I..............,:
,! 1 SWIТCH PGНO; S@l@ct ",НЬ РrоgrаlllПulllbеr
0 ;;Н
~
CRSE 1
15
РМ' (IEXT_PGНO.IPGНO_ACKH,DНY[].O
16
CA~:X:""CE1 ( ) ; С.Н Us.r-Progr..
17
18
1.
2.
РО' (IEХТ_РСНО,IPСНО_АС"Н,ОМУ(],.
; EXAНPLE2
21
22
23
( ) ;
Саll
3
;ЕХАМРLЕЗ
( ) :
1", 1",
)
Us@ r - Progra ~
'CA~~o (IEХТ_Рено ,lреНО_АС"Н,ОМУ(]
2_
2.
)
,')
I"", i"",
Саl1 Use r -Progra~
26
DEFAULT
Р" (IEXT_peНO,IPeНOJAULT ,ОМУ(],.)
27
28
2.
3.
31
~ Е~r:~~J·П~К............-......--.--.-.-.-.................................
Е iiг ·
Н
j!
..................................···· .......... ·........ · ................ · ...... •
Рис. 11-3: Программа Cell
1
Инициализация и положение Home:
•
•
инициализация базовых параметров ;
проверка положения робота после принятия положения
Home;
•
инициализация интерфейса внешне й автоматики .
2
Непрерывный цикл :
•
•
3
запрос номера программы модулем « РОО » ;
переход в цикл выбора с оп редел енным н о мером программы .
Цикл выбора номера программы :
•
соответственно номеру программы (хранится в переменной
«PGNO») выполняется переход к текущей ветви (<<CASE»);
•
затем обрабатывается введенная в ветвь программа робота ;
•
недействительные номера nporpaMMbl приводят к переходу е
ветвь «Default»;
•
после успешной обработки цикл повторяется .
KUKA
KUKA
n Of аммl'
Ol'aHl-1е
обота 1
Порядок
1.
Перекпючиться е группу пользователей «Эксперты» .
действий
2.
Открыть проrpЭММУ CELL.SRC.
З.
В разделах CASE заменить обозначение EXдMPLE именем програм ~
МЫ, которую должна вызвать текущая программа с номером . Удалить
точку с запятой перед названием.
LOOP
РОВ (аЕХТ_РСНО.ОРСНО_СЕТ.DМУ[) ••
SWITCH
рено
;
)
Select with P~ogra~nu~er
CASE 1
РОО ( О ЕХТ
Р GНО.'РСНО_АСКН.DМУ(] • •
)
Р О О ( а ЕХТ р еНО,арсно АСКН,DНУ[ ). О
)
main()
CASE 2
'~ЬОdУ _З 8() '"
bod!C 5 1 5 ( )
-
DEFAULT
РОО (8EX'_PCНO.'PGНO_FAUll.DНY[] . '
)
EНDSWJTC H
EttDLOOP
Рис. 11-4: Пример отредактированной программы Се!1
4.
Закрыть программу и сохранить изменения.
KUKA
индекс
д
Кнопка аварийного останова 16
Аварийный останов 14
Комментарий 176
Архивирование 105
Контроль выполнения программы 171
Контроль ориентации 124, 129
Б
Конфиryрация захвата 164
Безопасный останов О 44
Безопасный останов 1 44
л
Безопасны й останов 2 44
Логика , общая информация 139
безопасный останов STOP 044
Безопасный останов STOP 1 44
м
Безопасный останов STQP 2 44
Менеджер соединений 13
безопасный останов , внешний 18
безопасный рабочий останов 44
н
бесконечный ЦИКЛ 171
Нагрузки на роботе 58
Неотклоняем ый цикл 173
в
Внешняя автоматика 185
о
Восстановление 105
Основание робота 27
Вставка 178
Основная система координат 27
Встроенный формуляр 112
Отклоняемый цикл 172
Выбор программы 96
n
д
По отдельности ( пункт меню) 158
Данные дополнительной загрузки (пункт
Подпрorpамма глобальная 180
меню) 61
Подпрограмма локальная 180
Данные нагрузки инструмента 58
Подпрограммы 180
Данные нагрузки инструмента (ПУНКТ меню)
Программа дублирование 105
59
Программа переименование 105
Диалоговое сообщение 20
Программа удал ение 104
Программирование захвата 162
э
Программирование перемещений робота 111
Запрос IF 174
Программирование , внешняя точка ТСР 136
Запуск программы 96
Пространственная мышь 14
Запуск программы от ПЛК 185
Протокол 107
Переменная , изменение 158
и
Переменная , отдельная индикация 158
Изменение , ком анды перемещения 130
Переменные 157
Индикация , пвременные 157
Перемещение вручную по осям 23
Инициализация 95
Перемещение вручную , база 40
Информационное сообщение 20
Перемещение вручную , инструмент 35
Перемещение вруч ную , стационарный
к
инструмент 47
Калибровка базы 75
Перемещение вручную, универсальное 28
Калибровка инструмента 61
Перемещение осей по отдельности 23
Калибровка , стационарный инструмент 84
Перемещение CIRC 122
Калибровка , управляемая роботом заготовка
Перемещение LIN 122
86
Перемещение РТР 113
Категория останова О 44
Переход 171
Категория останова 1 45
Переход многократный 175
Категория останова 2 45
Переход условный 174
Квитируемое сообщение 19
Клавиатура 14
р
Клавиша клавиатуры 14
Распределитель 175
Клавиша обратного пуска 14
Режим интерполяции 118, 129
Клавиша пуска 14
Режим работы 21
Клавиша СТОП 14
Клавиши перемещения 14
с
КЛавиши состояния 14
Сглажива ние 118, 129
KUKA
n
r ilмми ова .. ие
Обота 1
Сглаживание CIRC 126
ф
Сглаживание LIN 126
Формуляр 179
Сглаживание РТР 115
Синryлярность 122
Функции переключения, простые 144
Функция ожидания 141
Система безопасности робота 16
Функция переключения , траектория 147
Система координат 27
Система координат инструмента 27
Система координат фланца 27
Системные переменные 159
ц
Сообщения 19
ЦИКЛ REPEAT 173
Цикл с подсчетом 172
ЦИКЛ FOR 172
Сообщение о состоянии 19
ЦИКЛ \IVI-IILE 172
Сообщение об ожидании 20
Цикл бесконечный 171
Стационарный инструмент, перемещение
Цикл неотклоняем ый 173
вручную 47
Цикл отклоняемый 172
Структура программы 171
Цикл с подсчетом 172
Циклы 171
т
Точка запястья 122, 123
ш
Штамп 176
у
Универсальная система координат 27
э
Управление захватом 161
Экстренное положение 24
Упражнение, выполнение программ робота
102
к
Упражнение. индикация системных
KUКA.GripperTech 161
переменных 160
Упражнение, калибровка базы стопа 81
Упражнение, калибровка внешнего
L
LOOP 171
инструмента 87
Упражнение, калибровка инструмента с
s
захватом 73
БАК95
Упражнение, калибровка инструмента со
штифтом 70
БТОР 044
БТОР 1 45
Упражнение, логика 153
STOP 2 45
Упражнение, программа Air 119
Упражнение, программирование 182
w
Упражнение, программирование захвата с
WAIT 141
WAIT FOR 141
табличкой 166
Упражнение, программирование захвата со
штифтом 168
Упражнение,программирование
перемещения с внешней точкой ТСР 136
Упражнение, перемещение вручную со
стационарным инструментом 48
Упражнение, перемещение вручную ,
инструмент 38
Упражнение, перемещение по траектории
1ЗЗ
Упражнение, сглаживание 133
Упражнение, управление и перемещение
вручную 33
Упражнение, функции переключения 153
Упражнение, цифровая калибровка
инструмента 73
Упражнение, юстировка нагрузки со
смещением 56
Упражнение, юстировка робота 56
Упражнение , CELL.SRC 182
Упражнение, KRL 182
Устройство свободного вращения 25
190/191
n
ограмми
овзние
060та
1
KUKA