Verba V S - Aviatsionnye komplexy radiolokatsionnogo dozora i navedenia Sistemy monitoringa - 2008
advertisement

В.С. Верба
АВИАЦИОННЫЕ КОМПЛЕКСЫ
РАДИОЛОКАЦИОННОГО ДОЗОРА
И НАВЕДЕНИЯ
Состояние и тенденции развития
УДК 621.396.96
В31
ББК 32.95
Научная серия
«Системы мониторинга воздушного, космического пространства и земной поверхности»
Редакционная
коллегия:
главный редактор - докт. техн. наук, проф. B.C. Верба
зам. гл. редактора - канд. техн. наук, проф. В.И. Меркулов
члены редколлегии: чл.-корр. РАН |Л.Д. Бахрах|; ст. научн. сотр., докт. техн. наук
В.А. Гандурин; докт. техн. наук, проф. А.П. Курочкин; академик РАН А.Л. Микаэлян;
докт. техн. наук, проф. Л. Б. Неронский; ст. научн. сотр., канд. техн. наук В.А. Плющев;
чл.-корр. РАН А.П. Реутов; докт. воен. наук, проф. А.Т. Силкин; докт. техн. наук
В.Н. Шахгеданов; чл.-корр. РАН В.Б. Штейншлейгер
Рецензенты:
академик РАН И.Б. Фёдоров;
засл. деятель науки РФ, докт. техн. наук, проф. СВ. Игольников;
засл. деятель науки и техники РФ, лауреат Государственной премии СССР,
докт. техн. наук, проф. Г.С. Кондратенков
Верба В. С.
В31
Авиационные комплексы радиолокационного дозора и наведения. Состоя­
ние и тенденции развития. - М.: Радиотехника, 2008. - 432 с: ил. (Серия
«Системы мониторинга воздушного, космического пространства и земной поверх­
ности», редактор серии B.C. Верба).
ISBN 978-5-88070-204-6
Данная монография - вторая книга из серии «Системы мониторинга воздушного,
космического пространства и земной поверхности» - посвящена анализу современного
состояния и тенденций развития отечественных и зарубежных авиационных комплек­
сов радиолокационного дозора и наведения; содержит результаты многолетних теоре­
тических и экспериментальных исследований автора, ведущих отечественных ученых и
инженеров, отражающих различные аспекты построения и разработки бортовых ра­
диолокационных систем этого назначения.
Предназначена для специалистов в области радиолокации, управления, создания
сложных технических систем, а также аспирантов и студентов старших курсов
высших учебных заведений авиационного и радиотехнического профиля.
ISBN 978-5-88070-204-6
УДК 621.396.96
ББК 32.95
© Автор, 2008
© Издательство «Радиотехника», 2008
САЙНС-ПРЕСС, оригинал-макет, оформление, 2008
ОГЛАВЛЕНИЕ
Вступительное слово академика РАН Е.А. Федосова
8
От автора
9
Предисловие
11
Введение
13
ЧАСТЬ 1
ПРИНЦИПЫ ПОСТРОЕНИЯ И ОСОБЕННОСТИ БОЕВОГО
ПРИМЕНЕНИЯ АВИАЦИОННЫХ КОМПЛЕКСОВ
РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
ГЛАВА 1. Оперативно-стратегическое назначение и опыт боевого
применения авиационных комплексов радиолокационного
дозора и наведения
1.1. Предназначение и задачи, решаемые авиационными
комплексами радиолокационного дозора и наведения
в кризисных ситуациях на стратегических направлениях
1.2. Задачи, решаемые авиационными комплексами
радиолокационного дозора и наведения при отражении
воздушного нападения
1.3. Опыт боевого применения авиационных комплексов
радиолокационного дозора и наведения (АВАКС)
в Югославии и Ираке
1.3.1. «Буря в пустыне» 17. 01.-23.02.1991 г., Персидский залив
1.3.2. «Лиса в пустыне» 17.12.-20.12. 1998 г., Персидский залив
1.3.3. «Решительная сила» 24.03.-10.06. 1999 г., Балканы
1.3.4. «Операция «Свобода Ираку» 20.03.-15.04 2003 г., Ирак
1.4. Использование авиационных комплексов радиолокационного
дозора и наведения при решении антитеррористических
и других задач
1.5. Структура и особенности взаимодействия авиационных
комплексов радиолокационного дозора и наведения
с потребителями информации
1.6. Показатели эффективности применения авиационных
комплексов радиолокационного дозора и наведения
1.7. Состав авиационных комплексов радиолокационного дозора
и наведения и режимы их функционирования
Литература
22
22
22
29
31
32
34
34
35
37
39
44
51
57
ГЛАВА 2. Принципы построения бортовой радиолокационной системы
авиационного комплекса радиолокационного дозора и наведения
2.1. Функциональные задачи и структурная схема бортовой
радиолокационной системы
2.2. Энергетический потенциал бортовой радиолокационной
системы
2.3. Радиолокационные характеристики целей
2.3.1. Радиолокационные характеристики воздушных целей
2.3.2. Радиолокационные характеристики морских целей
2.3.3. Радиолокационные характеристики наземных целей
2.3.4. Радиолокационные характеристики земной и водной
поверхностей
2.4. Характеристики среды распространения электромагнитных
волн
2.5. Передающее устройство
2.6. Антенная система
2.7. Приемное устройство
2.8. Алгоритмы обработки сигналов
2.8.1. Обнаружение низколетящих целей
2.8.2. Оценка характеристик обнаружения низколетящих воздушных
целей БРЛС с квазинепрерывным излучением
2.8.3. Обнаружение загоризонтных воздушных целей
2.8.4. Обнаружение надводных целей
2.8.5. Особенности алгоритмов обнаружения воздушных целей БРЛС,
работающей в Р-диапазоне
2.8.6. Зоны обзора и режимы работы БРЛС
Литература
58
58
64
66
66
72
74
75
79
83
86
90
94
94
104
112
114
115
116
118
Г Л А В А 3. Системы и алгоритмы обработки радиолокационной
информации
119
3.1. Алгоритмы первичных измерений координат целей
119
3.1.1. Характеристики данных сигнального процессора
119
3.1.2. Принципы алгоритмов формирования первичных
радиолокационных измерений
123
3.2 Алгоритмы сопровождения целей в бортовой радиолокационной
системе авиационного комплекса радиолокационного
дозора и наведения
135
3.2.1. Общие положения
135
3.2.2. Алгоритмы АСЦРО с идентификацией измерений
в стробах отождествления и а-, β-фильтрацией
137
3.2.3. Сопровождение целей и фильтрация траекторий
143
3.3. Алгоритмы автоматического сопровождения целей в режиме
обзора с адаптивной коррекцией прогноза и бесстробовой
идентификацией радиолокационных измерений
146
Литература
160
ГЛАВА 4. Помехозащищенность бортовой радиолокационной
системы
162
4.1. Показатели помехозащищенности бортовой радиолокационной
системы. Принципы достижения требуемого уровня
помехозащищенности
163
4.2. Предложения по технической реализации заданного уровня
помехозащищенности бортовой радиолокационной
системы
176
4.3. Помехоустойчивые алгоритмы вторичной обработки
информации в БРЛС при автоматическом сопровождении
целей в режиме обзора
182
4.4. Методы и алгоритмы функционирования подсистемы
сопровождения целей-постановщиков активных помех
по пеленговой информации бортовой радиолокационной
системы
205
4.4.1. Кинематический метод оценки координат целей-ПАП
205
4.4.2. Метод и реализующий его алгоритм самотриангуляции в БРЛС
для сопровождения целей-ПАП
210
4.5. Метод защиты от ответных импульсных помех, основанный
на совместном применении разностнои суммарно-дальномерного способов определения
координат
218
Литература
224
ГЛАВА 5. Особенности построения и функционирования системы
наведения истребителей на воздушные цели
225
5.1. Особенности построения и режимы работы системы наведения
истребителей на воздушные цели
225
5.2. Методы наведения самолетов на воздушные цели
228
5.2.1. Особенности дальнего наведения истребителей
229
5.2.2. Методы наведения в горизонтальной плоскости
232
5.2.3. Методы наведения по высоте
236
5.3. Координированное наведение групп летательных
аппаратов
240
5.4. Полуавтономные действия наводимых летательных
аппаратов
244
5.5. Принципы построения и особенности функционирования
командных радиолиний
247
5.5.1. Общие сведения о командных радиолиниях управления
247
5.5.2. Шифраторы и дешифраторы командной радиолинии
с кодово-импульсной модуляцией
251
Литература
256
ЧАСТЬ 2
МНОГОФУНКЦИОНАЛЬНЫЕ КОМПЛЕКСЫ
РАДИОЛОКАЦИОННОГО ДОЗОРА
И НАВЕДЕНИЯ НОВОГО ПОКОЛЕНИЯ
257
ГЛАВА 6. Направления формирования технического облика
авиационного комплекса радиолокационного дозора и наведения
нового поколения
257
6.1. Стратегические, оперативные и тактические факторы,
влияющие на облик авиационного комплекса радиолокационного
дозора и наведения
257
6.2. Экономические факторы, влияющие на облик авиационных
комплексов радиолокационного дозора и наведения
269
6.2.1. Многофункциональность АК РЛДН
271
6.2.2. Экономичные боевые режимы работы АК РЛДН
273
6.2.3. Снижение потерь самолетов
276
6.3. Технологические факторы, влияющие на облик авиационных
комплексов радиолокационного дозора и наведения
277
6.4. Живучесть авиационных комплексов радиолокационного
дозора и наведения
281
6.5. Режимы работы авиационных комплексов радиолокационного
дозора и наведения нового поколения
290
Литература
297
ГЛАВА 7. Тенденции развития интегрированных авиационных
информационно-управляющих комплексов
7.1. Направления модернизации и развития информационноуправляющих комплексов
7.2. Тактико-технические характеристики бортовых
радиолокационных систем перспективных комплексов
7.3. Бортовая радиолокационная система с цифровой активной
фазированной антенной решеткой перспективного комплекса
7.4. Перспективные комплексы, оснащенные бортовыми
радиолокационными системами с активными антенными
решетками
7.4.1. Комплекс типа АВАКС с БРЛС MESA
7.4.2. Система дальнего радиолокационного обнаружения
и управления «Фалкон» на самолете Боинг-707
7.4.3. Система дальнего радиолокационного обнаружения
и управления «Фалкон» на самолете Ил-76ТД
7.4.4. Самолет дальнего радиолокационного обнаружения
и управления SAAB 100B «АРГУС» системы FSR-890
301
301
310
317
325
325
328
331
336
7.4.5. Палубный самолет дальнего радиолокационного обнаружения
и управления «Хокай-2000» с БРЛС типа АФАР
7.4.6. Самолет базовой патрульной авиации Р-8А «Посейдон»
7.4.7. Информационно-разведывательные комплексы на аэростатах
и дирижаблях
Литература
ГЛАВА 8. Тенденции развития систем командного управления
авиационных комплексов ридиолокационного дозора
и наведения
8.1. Основные направления совершенствования методов
наведения
8.2. Способы повышения скрытности методов наведения
8.3. Методы наведения на наземные объекты
8.3.1. Оптимизация метода командного наведения
летательных аппаратов на наземные цели
8.3.2. Оптимизация алгоритмов наведения на малоразмерные
наземные цели при использовании активного синтезирования
апертуры антенны
8.4. Управление летательными аппаратами в многопозиционных
системах наведения
8.5. Особенности управления летательными аппаратами
при решении различных задач
8.6. Перспективы развития командных радиолиний управления
8.6.1. Командные радиолинии управления со сложными сигналами
8.6.2. Особенности построения бортовой аппаратуры приема команд
наведения и активного ответа
8.7. Авиационный комплекс радиолокационного дозора
и наведения как элемент глобальной сетецентрической
информационно-управляющей системы
8.8. Управление информационными возможностями
авиационного комплекса радиолокационного дозора
и наведения
Литература
341
344
345
348
349
249
353
359
360
364
371
380
385
385
391
393
402
419
Заключение
422
Перечень сокращений
424
В научной серии «Системы мониторинга воздушного, космического про­
странства и земной поверхности» вышла монография, в которой впервые
рассматривается широкий круг теоретических и прикладных вопросов по­
строения и функционирования авиационных комплексов радиолокационно­
го дозора и наведения (АК РЛДН), одного из самых сложных видов инфор­
мационно-управляющих систем воздушного базирования.
Отличительной особенностью монографии является изложение ма­
териала в двух частях. В первой части отражено современное состояние
АК РЛДН, во второй — перспективы на ближайшее и более отдаленное бу­
дущее, включая их интеграцию в глобальную сете центрическую информа­
ционно-управляющую систему. Несомненным достоинством книги явля­
ется обоснование тенденций развития АК РЛДН с учетом не только воен­
ных, но и экономических и технологических аспектов, позволяющих
провести всесторонне взвешенный комплексный анализ принимаемых но­
вых конструкторских решений.
Перед автором стояла сложная задача объединить в одной книге раз­
нородные сведения и подходы к построению бортовых радиолокационных
систем и использующих их информацию систем наведения на различные
типы воздушных и наземных объектов. На мой взгляд, он нашел удачное
решение этой проблемы.
Автор книги - известный ученый, крупный специалист в области ра­
диолокации и радиоуправления, являясь Генеральным конструктором Рос­
сийской Федерации по системам и комплексам разведки, дозора и управле­
ния авиационного базирования, возглавляет крупнейший в стране научноисследовательский центр, занимающийся разработкой сложных информа­
ционно-управляющих систем воздушного и космического базирования.
Книга, содержащая большой объем фактического материала, в том
числе и справочного, а также новые подходы к проектированию сложных
информационно-управляющих систем, будет полезна широкому кругу чи­
тателей: от инженеров-проектировщиков и эксплуатационников до руко­
водителей крупных научных подразделений. Несомненно, она будет полезна
преподавателям, аспирантам и студентам вузов авиационного и радио­
технического профиля.
Академик РАН
Е. А. Федосов
Ученым, конструкторам,
инженерам, испытателям,
военным специалистам —
создателям отечественных АК РЛДН
посвящается...
Дорогие
читатели!
Вашему вниманию предлагается книга, в которой изложена позиция головного
предприятия ОАО «Концерн радиостроения «Вега», совета главных конструк­
торов и автора на проблемы разработки авиационных комплексов радиолокаци­
онного дозора и наведения (АК РЛДН), являющихся наиболее сложными инфор­
мационно-управляющими системами воздушного базирования. В монографии
дан концептуальный анализ состояния и перспектив развития АК РЛДН.
Летом 2008 г., когда работа над книгой уже была близка к завершению, к
глубокому сожалению, из жизни ушел великий ученый и человек, работавший
на нашем предприятии 63 года, длительное время возглавлявший антенный
отдел, ученик А.А. Пистолькорса — Лев Давидович Бахрах. Результаты фун­
даментальных исследований А.А. Пистолькорса и его учеников Л Д. Бахраха,
АЛ. Микаэляна и др. легли в основу создания многих сложнейших технических
систем, в том числе радиолокаторов АК РЛДН. Лев Давидович Бахрах вместе
с членами научно-технического совета предприятия, коллегами по науке —
академиком РАН А.Л. Микаэляном, членом-корреспондентом РАН А.П. Реуто­
вым (в прошлом заместитель министра радиопромышленности СССР) был
одним из инициаторов написания этой книги, считая, что обязанностью лиде­
ров нашего предприятия является не только создание передовых образцов
техники, но и научно-педагогическая деятельность: научный анализ текущего
состояния разработок и тенденций их развития, подготовка новых поколений
ученых и специалистов, популяризация лучших отечественных достижений в
науке и технологиях.
Во многом благодаря настойчивости и поддержке этой тройки патриар­
хов российской науки и нашего предприятия, удалось довести идею написания
такой книги до ее логического завершения.
Создание в 70-х годах прошлого века АК РЛДН А-50 с комплексом
«Шмель» является одним из важнейших научно-технических достижений не
только коллектива нашего предприятия и предприятий кооперации, но и всего
отечественного авиа- и радиостроения. Огромный вклад в создание отечест-
венных АК РЛДН внесли: Бахрах Л.Д., Васильев А.В., Воронцов В.М., Гандурин В.А., Иванов В.П., Иванов В.П. мл., Карпеев В.И, Мельников Л.Я., Мина­
ев С.Н., Петров Л.Н., Погрешаев В.Ф., Резепов О.В., Станишнев-Коновалов В.Ф.,
Трофимов А.А. и многие другие известные и (в силу известных причин) неиз­
вестные ученые, конструкторы, инженеры, испытатели, военные специали­
сты. Сегодня новое поколение разработчиков трудится над модернизацией и
созданием отечественных АК РЛДН, воплощающих в себе самые современные
достижения науки и техники.
Всем, кто создавал отечественные АК РЛДН и работает над этими про­
блемами в настоящее время, посвящается эта книга. В ней впервые изложены
основные принципы и проблемы создания таких систем и тенденций их раз­
вития в будущем.
Выражаю огромную благодарность и искреннюю признательность со­
трудникам предприятия, коллегам по совету главных конструкторов, рецен­
зентам, чьи замечания, советы и рекомендации, а также многочисленные кон­
структивные обсуждения, постоянная поддержка в процессе работы позво­
лили улучшить содержание книги и завершить этот многолетний труд.
С уважением,
В. С. Верба
ПРЕДИСЛОВИЕ
Монография «Авиационные комплексы радиолокационного дозора и на­
ведения. Состояние и тенденции развития» является очередной книгой из на­
учной серии «Системы мониторинга воздушного, космического пространства и
земной поверхности». Это первая в нашей стране научная монография, посвя­
щенная современному состоянию и перспективам развития авиационных ком­
плексов радиолокационного дозора и наведения (АК РЛДН).
Возрастающие требования к точности и достоверности мониторинга ок­
ружающего пространства как в военной области, так и в интересах решения хо­
зяйственных задач обусловливают важность разработки специальных инфор­
мационно-управляющих систем авиационного базирования, способных опера­
тивно, круглогодично и круглосуточно, независимо от погодных условий, на
больших удалениях и в широкой зоне наблюдения обеспечить получение све­
дений о функциональном состоянии интересующих районов и реализацию этих
сведений в виде конкретных управляющих воздействий с привлечением боль­
шого числа исполнительных систем. К таким системам мониторинга и управ­
ления прежде всего относятся АК РЛДН.
Необходимость значительного повышения эффективности и снижения стои­
мости жизненного цикла предопределила разработку на основе АК РЛДН много­
функциональной информационно-управляющей системы, что предполагает рас­
ширение числа используемых информационных и управленческих режимов.
Требования снижения затрат при возрастающих сложности и объеме ре­
шаемых задач обусловили переход к интегрированным системам, в которых
комплексирование осуществляется не только на уровне первичных измерите­
лей, но и на уровне функциональных систем.
Эти особенности приводят к существенному усложнению АК РЛДН ново­
го поколения. При этом в процессе создания таких систем основные возможно­
сти, показатели эффективности, режимы работы и принципы построения долж­
ны быть заложены уже на уровне разработки технического облика, предусмат­
ривающего продолжительность эффективной эксплуатации в течение несколь­
ких десятилетий.
В данной работе представлены концептуальные подходы к обоснованию
облика АК РЛДН с учетом всего комплекса противоречащих друг другу опера­
тивно-тактических, экономических и технологических факторов. Изложены
принципы построения и особенности функционирования существующих
АК РЛДН, рассмотрены стратегические, оперативно-тактические, экономиче­
ские и технологические факторы, влияющие на облик АК РЛДН нового поко-
ления и на тенденции развития систем наведения и бортовой радиолокацион­
ной системы (РЛС).
Книга предназначена для инженеров и научных сотрудников, связанных с
обслуживанием и проектированием сложных технических систем военного и
гражданского назначения, а также для преподавателей, аспирантов и студентов
соответствующих факультетов и вузов.
Монография написана на основе только открытой отечественной и зару­
бежной литературы (справочники, монографии, статьи, рекламные проспекты).
Она состоит из предисловия, введения, двух частей и заключения.
Во введении дается краткий очерк истории разработки и применения
АК РЛДН в нашей стране и за рубежом.
В состав п е р в о й ч а с т и входят пять глав.
В первой главе рассматриваются назначение АК РЛДН и варианты его
применения при решении различных задач, показатели его эффективности,
взаимодействие с потребителями информации, структура и характеристики
комплекса.
Вторая и третья главы посвящены принципам построения бортовых РЛС
АК РЛДН и используемым в них алгоритмам первичной и вторичной обработки.
В четвертой главе излагаются принципы обеспечения помехозащищенно­
сти РЛС АК РЛДН и вопросы технической реализации ее заданного уровня.
В пятой главе рассматриваются особенности построения и функциониро­
вания системы наведения.
В состав в т о р о й ч а с т и , посвященной облику АК РЛДН нового по­
коления, входят три главы.
Шестая глава посвящается влиянию стратегических, оперативнотактических, экономических и технологических факторов на облик АК РЛДН
нового поколения.
В седьмой главе рассматриваются тенденции развития многофункцио­
нальных РЛС, входящих в состав АК РЛДН.
Восьмая глава посвящена тенденциям развития систем наведения
АК РЛДН.
Замечания и предложения по улучшению содержания книги просьба при­
сылать в Издательство «Радиотехника» по адресу:
107031, г. Москва, К-31, ул. Кузнецкий мост, д. 20/6.
Телефон Издательства: (495) 625-92-41; телефон/факс: (495) 621-48-37.
Редакционная коллегия научной серии
«Системы мониторинга воздушного, космиче­
ского пространства и земной поверхности»
ВВЕДЕНИЕ
В 50-е годы XX в. задачи комплексов противовоздушной обороны (ПВО)
и управления воздушным движением (УВД) по обнаружению, сопровождению
самолетов и наведению на них истребителей были решены путем создания
сплошного радиолокационного поля над территорией США, СССР, Европы и
некоторых других стран. Однако оставались проблемы, которые требовали
принципиально новых подходов для их разрешения.
Первая проблема заключалась в выполнении задач обнаружения, сопро­
вождения и распознавания воздушных целей, летящих на малых и предельномалых высотах. Дальность прямой видимости в этих случаях определяет воз­
можную дальность обнаружения целей и составляет 10...30 км, а с учетом по­
лета целей с огибанием и облетом неровностей рельефа земной поверхности
она и того меньше.
Вторая проблема связана с задачами проведения воздушных операций в
различных районах земного шара, где отсутствует радиолокационное поле на­
земных (корабельных) РЛС, которое может быть использовано для решения за­
дач контроля воздушного пространства. Особенно остро эта проблема стояла
перед США, военная доктрина которых определяла необходимость военного
присутствия во всех районах «американских интересов». Основной ударной
силой при этом считалась военная авиация, ее носители - авианосные ударные
соединения и военные базы, расположенные в различных странах практически
на всех континентах.
Решить эти проблемы предполагалось, создав специальные авиационные
комплексы дальнего радиолокационного обнаружения (ДРЛО). Мощные радио­
локационные станции, размещенные на борту самолета, летящего на высоте
9...12 км, могут обнаруживать низколетящие самолеты вплоть до радиогори­
зонта (400 км), а также надгоризонтные цели на еще больших дальностях. Ос­
новными боевыми задачами такой системы являются завоевание и поддержка
превосходства в воздухе, управление ударной авиацией при действиях по на­
земным целям, контроль и управление авиационными группировками. Такая
авиационная система, заказанная ВВС США в конце 60-х годов прошлого века,
получила название AWACS (АВАКС) - система обнаружения и управления
воздушного базирования. В СССР такой комплекс был назван АК РЛДН авиационным комплексом радиолокационного дозора и наведения. Впервые
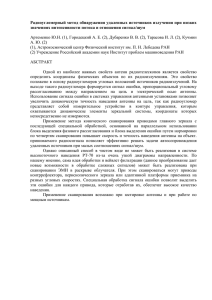
такой комплекс на самолете Ту-126 с радиотехническим комплексом (РТК)
«Лиана» был принят на вооружение в 1965 г. Он имел форму антенной систе­
мы в виде плоской антенной решетки во вращающемся обтекателе грибовид­
ной формы (рис. 1), ставшей впоследствии классической. Обтекатель устанав-
ливался на пилоне над фюзеляжем самолета. Такая конструкция и размещение
антенны большого размера обеспечивали круговой обзор и большую дальность
обнаружения самолетов, летящих над слабо отражающей поверхностью (мор­
ская, ледовая) в L-диапазоне волн работы радиолокатора. Всего было создано
девять комплексов, которые использовались в основном в системе ПВО север­
ного и северо-западного направлений (со стороны Северного полюса).
Рис.1
К концу 60-х годов XX в. опыт использования комплексов «Лиана» пока­
зал их недостаточную эффективность при обнаружении и сопровождении ско­
ростных малозаметных воздушных целей, летящих на малых высотах у земной
поверхности. В 1969 г. было принято Постановление Совета Министров СССР
о разработке радиотехнического комплекса «Шмель», который должен был об­
наруживать самолеты (бомбардировщики, истребители), крылатые ракеты и
другие летательные аппараты на фоне земной поверхности всех типов на даль­
ности радиогоризонта (цели с большой эффективной площадью рассеивания),
надгоризонтные цели на большой дальности и морские цели (корабли). Работа
была поручена Московскому НИИ приборостроения (НПО «Вега») под руко­
водством главного конструктора В.П. Иванова. В состав РТК «Шмель» входи­
ли следующие системы:
трехкоординатная РЛС S-диапазона с пассивным каналом пеленгации ис­
точников излучения;
аппаратура съема и отображения информации;
система активного «запроса-ответа» и передачи команд целеуказания ис­
требителям-перехватчикам ;
цифровой вычислительный комплекс БЦВМ А-50 (НИИ «Аргон») для ре­
шения задач управления и наведения истребителей на воздушные цели. Число
одновременно сопровождаемых целей - 50, одновременно наводимых - 10.
В модернизированных комплексах «Шмель-М» и «Шмель-2» число сопровож­
даемых воздушных целей - соответственно 150 и 300;
система госопознавания;
командная линия радиоуправления;
засекречивающая аппаратура связи (ЗАС);
комплекс связи (дальность радиосвязи KB - 2000 км, УКВ - 400 км), спут­
никовая радиосвязь;
телекодовая аппаратура;
аппаратура документирования;
комплекс самообороны, содержащий системы активного и пассивного ра­
диоэлектронного противодействия.
Масса РТК «Шмель» составляла 20 т, что потребовало создания нового
носителя (вместо Ту-126). Новый самолет создавался на базе серийного Ил-76,
что существенно снижало стоимость жизненного цикла АК РЛДН.
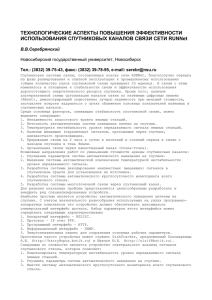
Создание самолета РЛДН А-50 было предписано ОКБ им. Г.М. Бериева
под руководством А.К. Константинова. Первый полет самолет А-50 совершил в
декабре 1978 г., а с августа 1979 г. начались его государственные испытания.
Конструкция самолета А-50 (как и Ту-126) имеет грибовидный обтекатель ан­
тенны размером 10,5x2 м, расположенный на пилонах сзади крыла над фюзе­
ляжем и несколько ниже стабилизатора. Вид АК РЛДН А-50 с РТК «Шмель» в
сопровождении пары МиГ-31 показан на рис. 2.
Рис. 2
Для улучшения аэродинамики и уменьшения мощности отраженного помехового сигнала РЛС от подстилающей поверхности, расположенной непо­
средственно под самолетом, сзади на обтекателях шасси поставлены треуголь­
ные горизонтальные аэродинамические гребни большой площади.
Длительность патрулирования комплекса РЛДН А-50 (без дозаправки) - 4 ч
на удалении 1000 км от аэродрома базирования. Экипаж комплекса РЛДН А-50
состоял из двух летчиков, штурмана, бортинженера, командира расчета, трех
операторов обнаружения, четырех штурманов наведения и двух связистов.
В 1984 г. началось строительство серийных А-50 с последующей опытной
эксплуатацией в строевых частях. Официально на вооружение комплекс был
принят в 1989 г. Основные этапы применения А-50:
крупные учения Вооруженных Сил СССР и стран Варшавского пакта (до
1990 г.);
контроль воздушного пространства Турции и Ирака со стороны Черного
моря во время операции «Буря в пустыне» США (1991 г.);
контроль воздушного пространства Чечни (1994 и 1999-2000 гг.).
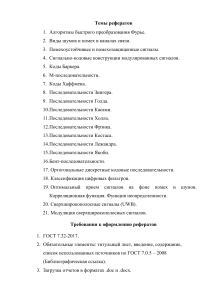
В США решение о разработке комплекса АВАКС было принято в 1967 г.
В качестве носителя был выбран пассажирский самолет Боинг 707-320С, над
фюзеляжем которого был размещен обтекатель антенны, как и у комплекса
А-50. На конкурсной основе проводили разработку и испытания двух типов
РЛС фирм «Хьюз» и «Вестингауз». В 1977 г. началось строительство серийных
комплексов с РЛС APY-1 («Вестингауз»), получивших обозначение Е-ЗА (мо­
дернизированные Е-ЗВ и Е-ЗС). Вид самолета дальнего радиолокационного об­
наружения (ДРЛО) Е-ЗС «Сентри» показан на рис. 3. К 1984 г. было построено
34 комплекса, каждый стоимостью 300 млн долл. в ценах 80-х годов прошлого
века. На тот период тактико-технические характеристики и функциональные
возможности А-50 и Е-ЗА были примерно одинаковыми.
Рис.3
Одновременно с комплексом Е-ЗА в Великобритании разрабатывался
комплекс AEW («Нимрод»). В этом комплексе антенны РЛС размещались в но­
совой и хвостовой частях самолета. По характеристикам и срокам готовности
он уступал Е-ЗА. Поэтому в 1980 г. страны НАТО приняли решение о создании
общенатовской группы (18 Е-ЗА с модернизированной РЛС APY-2) и британ­
ской эскадрильи (семь Е-ЗД). К 1988 г. обе группы были полностью боеготовы.
Большая часть Е-ЗА НАТО постоянно базируется в Турции, Греции, Италии и
Норвегии. Кроме того, 33 комплекса имеют ВВС США, 5 - Саудовская Аравия
и 4 - Франция.
Комплексы АВАКС, кроме регулярного участия в учениях, активно ис­
пользовались в вооруженных конфликтах. Так, в ходе операции «Буря в пусты­
не» в 1991 г. в Ираке самолеты Е-ЗА выполнили более 400 вылетов с общим
временем боевого дежурства 5000 ч. В Югославии сделано 500 вылетов с вре­
менем дежурства 4800 ч для проведения координации и слежения при наступа­
тельных и оборонительных операциях, поиска самолетов противника, опозна­
вания «свой-чужой». Осуществлялось также управление заправщиками, барра­
жировавшими в Адриатике.
Бурное развитие радиоэлектроники и прежде всего микроэлектроники по­
зволило проводить непрерывную модернизацию существующих комплексов Е-3
и создавать комплексы на новых принципах действия.
Основные цели модернизации и создания новых комплексов следующие:
значительное повышение тактико-технических характеристик (ТТХ) ком­
плексов (дальности обнаружения и сопровождения малозаметных высокоско­
ростных и маневрирующих целей, разрешение целей в группе по дальности и
азимуту, точности измерения координат, особенно высоты полета целей);
повышение оперативной гибкости (новые режимы работы);
увеличение зоны ответственности (объема зоны, числа одновременно об­
служиваемых целей и времени барражирования);
повышение помехозащищенности и боевой устойчивости комплексов;
обеспечение высокой надежности и ремонтопригодности;
снижение стоимости жизненного цикла (разработки, боевого применения
и эксплуатации).
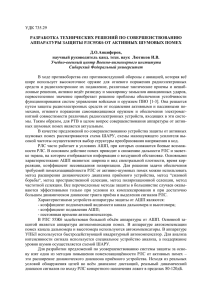
Примером модернизации служит комплекс Е-ЗД, поставляемый в Японию.
Для него используется новый самолет Боинг 767-27С (рис. 4), который имеет в
два раза больший объем, чем Боинг 707. Летный экипаж всего два человека, в
то время как число операторов достигло 22. Время полета - 1 3 ч (без дозаправ-
Рис. 4
ки). Новый, в два раза более производительный, компьютер СС-2Е обеспечива­
ет возможность слежения за 2000 целями. Установлена также модернизирован­
ная РЛС APY-2 с лучшими характеристиками по обнаружению малозаметных
целей.
Все вновь разрабатываемые РЛС комплексов используют вместо волноводно-щелевой антенной решетки с механическим сканированием неподвиж­
ные активные фазированные антенные решетки (АФАР) с электронным скани­
рованием. Такая конструкция позволяет достичь большинства целей модерни­
зации, одновременно обеспечивая создание новых комплексов.
Существующие опытные и разрабатываемые РЛС имеют плоские АФАР,
располагаемые на самолете различным образом. Так, РЛС PS-890 шведской
фирмы «Эриксон» имеет плоскую двухстороннюю АФАР длиной 8 м, распола­
гаемую на пилонах сверху вдоль фюзеляжа самолета SAAB340B комплекса
S100 В «Аргус» (рис. 5).
Рис.5
Каждая сторона ΑΦ АР имеет 192 твердотельных приемопередающих мо­
дуля S-диапазона и обеспечивает круговой обзор с несколько худшими харак­
теристиками в переднем и заднем секторах. Аналогично расположена АФАР
фирмы «Грумман» на самолете Боинг-737-80 комплекса 737/MESA (рис. 6). В
обтекателе размером 10,7x1,2x2,4 м установлена антенна РЛС MESA (много­
функциональная электронно-сканирующая антенна) L-диапазона.
Французская фирма «Райтеон» разработала комплекс А-310 AEW с РЛС
ESA системы «Фалкон» израильской фирмы IAIELTO. Три АФАР L-диапазона
расположены в виде равностороннего треугольника в невращающемся обтека­
теле грибовидной формы на пилонах над фюзеляжем самолета A310-300
(рис. 7). Такое расположение АФАР позволяет осуществлять круговой и про­
граммируемый обзор в любом секторе.
Рис.6
Рис.7
Рассматриваются также варианты расположения нескольких (до шести)
АФАР системы «Фалкон» на боковых поверхностях фюзеляжа, крыльях и хво­
стовом оперении.
Для обеспечения информацией о воздушной и надводной обстановке
авианосных ударных соединений, действующих далеко в отрыве от мест бази­
рования комплексов АВАКС Е-ЗА, необходим был самолет корабельного бази­
рования. Самолет комплекса Е-ЗА по массе и габаритам не мог быть размещен
на авианосцах.
В 1957 г. фирма «Грумман» получила заказ на создание комплекса сис­
темы управления истребительной авиацией, ударными авиагруппами и силами
ПВО над морем, обнаружения и распознавания кораблей, координации поис­
ково-спасательных операций на море и решения других задач. Комплекс
«Хокай» Е-2А был готов в 1960 г. Как и комплекс Е-ЗА, он имел дисковидный
обтекатель антенны размером 7,2 м, расположенный на пилоне над фюзеля­
жем (рис. 8).
Рис.8
Комплекс Е-2А неоднократно полностью модернизировался. Была произ­
ведена смена пяти поколений РЛС. Последний вариант комплекса Е-2С имеет
импульсно-доплеровскую РЛС AN/APS-145. Работает РЛС (как и ранее, в
UHF) в Р-диапазоне и позволяет сопровождать до 2000 целей на дальностях'до
радиогоризонта при полете над морем и наводить истребители на 40 воздуш­
ных целей. Дальнейшая модернизация предполагает установку РЛС с активной
фазированной антенной решеткой.
Следует отметить, что значение комплексов РЛДН (АВАКС) как инфор­
мационных систем непрерывно возрастает. Ни одна крупная операция как в
процессе учений, так и в период ведения боевых действий не осуществляется
без таких комплексов.
Бурный рост возможностей радио- и микроэлектроники позволяет созда­
вать комплексы типа АВАКС с высокими ТТХ и одновременным снижением
стоимости жизненного цикла. Это значительно увеличивает интерес и возмож­
ности оснащения такими комплексами ВВС многих стран.
Дальнейшие исследования и разработки в этой области направлены на
расширение функций по контролю не только воздушной и надводной, но и на­
земной обстановки (программа Е-10А США).
Разрабатываемый по программе Е-10А комплекс МС2А будет способен
выполнять функции комплексов АВАКС (Е-ЗВ) и ударно-разведывательных
Джистарс (Е-8С).
Комплекс Е-8С обеспечивает командование, управление и контроль на­
земными операциями, включая атакующие действия авиации, корабельных сил,
полевой артиллерии и своих войск (рис. 9).
Рис.9
РЛС AN/APY-3 комплекса позволяет обнаруживать наземные неподвиж­
ные и движущиеся цели на дальностях 250...300 км в боковом секторе обзора
±30°. Имеет вдольфюзеляжную (в подвесном контейнере) антенну типа ФАР
размером 7,3x0,6 м, что обеспечивает в Х-диапазоне ширину диаграммы на­
правленности по азимуту 0,3° и 3,5° по углу места. Режим синтезирования
апертуры и широкополосный зондирующий сигнал обеспечивают высокое раз­
решение на местности и детальное наблюдение целей, в том числе малоразмер­
ных (танки, ЗРК, БМП и т.п.). В процессе модернизации разрешающая способ­
ность будет повышена до 1,0.. .0,3 м.
В последние годы возрастает интерес к размещению информационноуправляющих комплексов на аэростатах и дирижаблях, которые могут обеспе­
чивать длительное непрерывное патрулирование заданной зоны обзора. При
этом стоимость жизненного цикла таких комплексов может быть на порядок
ниже авиационных комплексов.
Особенности построения авиационных комплексов РЛДН и их возможно­
сти по выполнению различных тактических задач рассматриваются в после­
дующих разделах этой книги.
ЧАСТЬ
1
ПРИНЦИПЫ ПОСТРОЕНИЯ И ОСОБЕННОСТИ
БОЕВОГО ПРИМЕНЕНИЯ АВИАЦИОННЫХ КОМПЛЕКСОВ
РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
ГЛАВА 1
ОПЕРАТИВНО-СТРАТЕГИЧЕСКОЕ НАЗНАЧЕНИЕ
И ОПЫТ БОЕВОГО ПРИМЕНЕНИЯ АВИАЦИОННЫХ КОМПЛЕКСОВ
РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
1.1. Предназначение и задачи, решаемые авиационными
комплексами радиолокационного дозора и наведения
в кризисных ситуациях на стратегических направлениях
Процессы планирования применения и непосредственного управления
войсками, силами и средствами требуют осуществления непрерывного слеже­
ния за воздушно-космической, наземной и морской обстановкой и обеспечения
надежного управления имеющимися войсками, силами и средствами в различ­
ных регионах планеты в масштабе времени, близком к реальному.
Одними из наиболее эффективных способов решения этих задач представ­
ляются в дальнейшем развитие существующих систем разведки и управления
вооруженных сил и объединение их в единую унифицированную информацион­
но-управляющую систему разведки, оповещения и управления [1, 2].
Важнейшим элементом воздушной составляющей этой системы должен стать
межвидовой авиационный комплекс радиолокационного дозора и наведения
(МАК РЛДН) как центральное, объединяющее звено многодатчиковой много­
платформенной системы, содержащей многофункциональный бортовой радио­
технический комплекс (МБРТК), бортовую информационную систему и ин­
формационные системы дистанционно-пилотируемых летательных аппаратов,
и наземных автоматизированных систем управления. Так, программой А-10
(США) предусматривается создание интегрированного авиационного комплек­
са разведки, оповещения и управления, выполняющего функции комплексов
Е-3 (РЛДН АВАКС) и Е-8 (разведывательный комплекс Джейстарс).
Главной стратегической задачей интегрированного АК РЛДН является
«слежение за ситуацией», которое подразумевает контроль функционального
состояния воздушной, наземной и надводной обстановки в мирное время, уг­
рожаемый период и в ходе боевых действий на стратегических направлениях.
Решение этой задачи при стратегическом и оперативном планировании
позволит обеспечить командование и штабы данными о возможностях и намере­
ниях вероятных противников, изменениях в оборудовании театров военных дей­
ствий и о других условиях, влияющих на возможный характер боевых действий.
Главной оперативной задачей МАК РЛДН в период развития военного
конфликта является обеспечение непосредственного управления ударной авиа­
цией, системами ПВО, авиационными группами истребителей завоевания гос­
подства в воздухе и самолетами радиоэлектронной борьбы, целеуказания ору­
жию и оказание информационной поддержки действиям общевойсковых со­
единений и частей на поле боя. Очевидно, что эффективное решение указанных
задач возможно только при условии создания единого информационного поля
разведки и управления в районе применения МАК РЛДН, интегрирующего раз­
ведывательные данные, команды и сигналы боевого управления существую­
щих систем разведки и управления.
Интегрированный АК РЛДН может обеспечить сбор, обработку и переда­
чу разведывательной информации, а также выполнение функций непосредст­
венного боевого управления. В связи с этим целесообразно объединить функ­
ции разведки и управления в рамках универсальной межвидовой системы раз­
ведки оповещения и управления [3].
Эта система, помимо существующих источников стратегической, опера­
тивной и тактической разведки, будет содержать новый комплекс воздушной
разведки и управления на базе межвидового авиационного комплекса радиоло­
кационного дозора и наведения, в который войдут воздушная и наземная со­
ставляющие. Такой комплекс позволит обеспечить решение стратегических,
оперативных и тактических задач в качестве воздушного командного пункта,
пункта наведения и целеуказания, бортового вычислительного центра, узла
связи и ретранслятора.
Наземная составляющая комплекса должна иметь взаимодействующие
пункты управления разведкой, командные пункты, системы обработки и обме­
на данными, командные системы боевого управления, автоматизированные
системы управления различных уровней управления, а также силы и средства
радиотехнических войск и зенитно-ракетных войск.
Таким образом, боевое применение МАК РЛДН в составе межвидовой
универсальной системы разведки, оповещения и управления позволит решать
целый комплекс стратегических, оперативных и тактических задач, направлен­
ных на повышение эффективности планирования, применения и непосредст­
венного управления вооруженными силами Российской Федерации. Решаемые
стратегические задачи:
слежение, т. е. контроль функционального состояния воздушной, назем­
ной и надводной обстановки для проведения комплексного анализа и оценки
обстановки и изменений на театре военных действий, оценки возникающих уг­
роз с учетом общих тенденций оперативно-стратегической и военно-политиче­
ской обстановки;
предупреждение (оповещение) о ракетно-авиационном нападении и уча­
стие в непосредственном управлении выделенными силами и средствами при
отражении воздушно-космического нападения противника;
информационно-аналитическое обеспечение органов военного управления
данными, необходимыми для комплексного планирования различных видов
деятельности вооруженных сил;
оперативные задачи:
оперативное обеспечение вооруженных сил, содержащее комплекс меро­
приятий по эффективному применению средств поражения, сохранению высо­
кой боеспособности войск (сил), воспрещению или предупреждению о воз­
можном внезапном нападении противника и снижению эффективности его
удара;
вскрытие основных группировок войск противника и направлений их
ударов;
создание и обеспечение информационного превосходства над против­
ником;
увеличение поля разведки и управления;
повышение боевых возможностей группировок своих войск за счет инте­
грации разведки и непосредственного управления средствами поражения, раз­
ведки и радиоэлектронной борьбы;
тактические задачи:
обнаружение, опознавание и слежение за подвижными и неподвижными
воздушными, наземными и морскими объектами;
целеуказание и наведение на цели сил авиации и средств поражения (в том
числе высокоточного оружия);
контроль результатов поражения целей и объектов противника;
радиолокационное обеспечение загоризонтной стрельбы зенитно-ракетных комплексов средней и большой дальности (ЗРС СД-ДД);
управление действиями авиационных средств разведки и радиоэлектрон­
ной борьбы;
участие в поиске, обнаружении и спасении потерпевших аварию и сбитых
экипажей.
Роль и место МАК РЛДН в процессе планирования применения и непо­
средственного управления ВС определяют состав задач, выполняемых ком­
плексом. В соответствии с функциональным предназначением МАК РЛДН
можно выделить следующие три взаимосвязанные группы:
1) задачи разведки;
2) задачи оповещения;
3) задачи управления.
Кроме того, существует еще ряд задач, обеспечивающих работу комплекса
по планированию и условиям его применения, техническому контролю функ­
ционирования, а также взаимодействию с внешними и внутренними источни­
ками и потребителями информации:
формирование и контроль выполнения полетных заданий;
обеспечение учебно-тренировочного цикла работы межвидового авиаци­
онного комплекса;
сервисные задачи по контролю и обслуживанию технического состояния
комплекса;
формирование и поддержка базы данных бортовой информационноуправляющей системы (БИУС);
ввод, обработка и вывод данных, необходимых для оценки обстановки и
принятия решений должностными лицами межвидового авиационного ком­
плекса на автоматизированных рабочих местах комплекса;
архивирование данных;
обеспечение защиты от несанкционированного доступа к базе данных;
управление порядком, режимами и параметрами связи и передачи данных
между межвидовым авиационным комплексом и внешними источниками и по­
требителями информации;
прием от управляющего пункта команд, распоряжений и передача донесе­
ний об их выполнении;
передача информации о воздушной, наземной и надводной обстановке на
наземные (корабельные) командные пункты (пункты управления);
выдача информации о воздушных объектах и нестратегических баллисти­
ческих ракетах на командные пункты взаимодействующих зенитно-ракетных
систем и зенитно-ракетных комплексов при самостоятельных или автономных
действиях;
обеспечение синхронизации системы единого времени с взаимодейст­
вующими комплексами средств автоматизации и комплексами технических
средств.
Основу задач разведки составляют сбор, отождествление информации от
внутренних и внешних датчиков комплекса и ее обработка:
сбор и обработка данных радиолокационной, радиотехнической и оптикоэлектронной разведки средств ракетно-ядерного нападения на земле (подразде-
ления ракетных комплексов в районах сосредоточения, на марше и в позици­
онных районах, стартовые позиции) в части вскрытия системы управления,
боевого состава, группировки, боевой готовности, направленности мероприя­
тий оперативной и боевой подготовки;
сбор и обработка данных разведки группировок средств воздушно-косми­
ческого назначения на аэродромах (площадках базирования, кораблях) и в воз­
духе в части вскрытия системы управления, боевого состава, группировки,
боевой готовности, направленности мероприятий оперативной и боевой подго­
товки;
сбор и обработка данных разведки центров управления воздушными опе­
рациями, центров и постов управления и оповещения;
вскрытие и непрерывное отслеживание радиоэлектронной обстановки на
территории противника с определением характеристик, режимов работы и дис­
локации РЛС, пунктов управления ПВО и узлов связи;
сбор и обработка данных разведки сосредоточений войск и боевой техни­
ки (сил флота) в приграничной (прифронтовой) полосе и в зоне прикрытия,
войск и боевой техники на марше;
вскрытие изменений в физико-географических характеристиках и инфра­
структуре районов в ходе подготовки к боевым действиям или после огневого
воздействия;
обнаружение и определение местоположения объектов удара;
контроль результатов удара;
обнаружение, распознавание классов (типов) и сопровождение воздуш­
ных, наземных (движущихся и неподвижных), надводных целей, нестратегиче­
ских ракетных средств нападения;
определение параметров движения подвижных объектов и непрерывное
сопровождение приоритетных воздушных (самолетов дальнего радиолокаци­
онного обнаружения и управления (ДРЛО и У), постановщиков активных по­
мех, разведывательно-ударных комплексов и др.), наземных (РЛС, пунктов
управления, узлов связи и др.) и надводных целей;
определение государственной принадлежности воздушных, наземных и
надводных объектов;
определение параметров навигационных систем и систем (органов) управ­
ления войсками, авиацией и ПВО, флотом;
картографирование местности;
комплексирование, отождествление и совместная обработка информации о
воздушных, наземных, надводных целях и нестратегических средствах нападе­
ния, получаемой от многофункционального бортового радиотехнического ком­
плекса МАК РЛДН и от внешних источников;
разведывательно-информационное обеспечение взаимодействующих ко­
мандных пунктов (пунктов управления) подразделений, частей, соединений,
объединений видов вооруженных сил, в том числе в условиях интенсивного
радиоэлектронного противодействия;
обнаружение излучающих целей, распознавание классов, типов и режимов
работы радиоэлектронных систем и средств воздушного нападения по изме­
ренным значениям параметров их сигналов;
определение координат нахождения летчиков со сбитых или потерпевших
аварию самолетов и вертолетов.
При решении группы задач оповещения в качестве исходной информа­
ции используются следующие результаты разведки, на основе анализа которых
делается вывод о качественном изменении состояния стратегической или опе­
ративной обстановки:
вскрытие признаков подготовки средств ракетно-ядерного нападения на
земле к нанесению удара (усиление группировки, рассредоточение, переход на
частоты военного времени, сигналы на изменение состояния боевой готовно­
сти, сигналы на применение, факт старта и т. д.);
вскрытие признаков подготовки группировок средств воздушного нападе­
ния к началу воздушного нападения (усиление группировки средств воздушно­
го нападения, усиление воздушной разведки, рассредоточение авиации, увели­
чение/уменьшение интенсивности полетов военной и гражданской авиации,
переход на частоты военного времени, развертывание воздушных систем даль­
него радиолокационного обнаружения и управления, массовый взлет и полет в
направлении линии фронта (границы), факт применения оружия и др.);
вскрытие признаков подготовки центров управления воздушными опера­
циями, центров и постов управления и оповещения, системы ПВО противника к
ведению боевых действий (переход радиотехнических и радиосредств на часто­
ты военного времени, сигналы на изменение степени боевой готовности и др.);
вскрытие по данным радиотехнической разведки факта функционирова­
ния, районов и мест дислокации передовых авианаводчиков;
вскрытие по данным радиолокационной и радиотехнической разведки ме­
стоположения мобильных наземных центров управления разведывательноударных комплексов;
установление факта выдвижения войск в прифронтовую (приграничную)
полосу и развертывания сил флота;
вскрытие их непосредственной подготовки к нанесению удара;
установление времени и районов взлета самолетов и крылатых ракет (КР),
а также обнаружение их в воздухе;
выявление оперативно-тактического построения сил воздушного против­
ника при нанесении им массированных ударов;
определение замысла и направлений его действий, способов прорыва
(преодоления) воздушно-космической обороны и действий по обороняемым
объектам;
оценка угроз для обороняемых наземных, морских и воздушных объектов
со стороны средств воздушного нападения и зенитно-ракетных комплексов
противника;
оценка угроз МАК РЛДН со стороны истребителей и зенитно-ракетных
комплексов противника;
выбор и выдача информации предупреждения и сигналов оповещения на
командные пункты органов военного управления.
Управление конкретными средствами или группами средств АКРЛДН
выполняет один из операторов комплекса, который осуществляет:
управление в воздухе пилотируемыми летательными аппаратами истреби­
тельной, штурмовой, бомбардировочной (ИА, ША, БА) и специальной авиации
ВВС, ВМФ, а также беспилотными летательными аппаратами, автоматизиро­
ванное наведение летательных аппаратов на воздушные, наземные и надводные
цели;
прием (передачу) управления летательными аппаратами (группой лета­
тельных аппаратов) в воздухе;
выработку рекомендаций по способам обороны и управление средствами
защиты МАК РЛДН на основе оценки угроз;
управление ведомыми МАК РЛДН в интересах создания РЛП (поля
управления) с заданными параметрами;
управление действиями авиационных средств разведки и радиоэлектрон­
ной борьбы;
обеспечение распределения сил радиоэлектронной борьбы, контроль эф­
фективности и корректировку постановки помех средствам ПВО, создаваемых
самолетами радиоэлектронной борьбы;
управление самолетами обеспечения (авиационными комплексами-ре­
трансляторами, самолетами-топливозаправщиками);
выбор мобильных полос обнаружения, сопровождения по неустойчиво со­
провождаемым воздушным целям (малоскоростным, малоразмерным, низколе­
тящим) средствами радиотехнических войск;
выбор режимов как централизованного (с командных пунктов частей и со­
единений вышестоящего уровня), так и децентрализованного управления.
обеспечение взаимодействия сил истребительной авиации и зенитных ра­
кетных систем в одной зоне;
управление передачей ракет, пущенных ЗРС СД-ДД, многоцелевым ис­
требителям.
В отдельную подгруппу задач управления, не связанных с переходом
средств поражения в оперативное подчинение МАК РЛДН, можно выделить
следующие задачи:
целеуказание и наведение на наземные и надводные цели сил авиации и
средств поражения (в том числе высокоточного оружия);
целеуказание ракетным подводным лодкам, ракетным надводным кораб­
лям, морской авиации и береговым ракетным частям;
целеуказание авиационным комплексам перехвата нестратегических ра­
кетных средств нападения для осуществления их поражения при боевом при­
менении авиационной системы предупреждения и перехвата нестратегических
ракетных средств нападения;
целеуказание авиационным комплексам истребительной авиации на воз­
душные цели;
целеуказание о воздушных целях наземным (корабельным) пунктам
управления зенитных ракетных систем, в том числе для стрельбы по низколе­
тящим, малоразмерным целям и за радиогоризонт;
целеуказание средствам радиоэлектронного подавления, имеющимся в
группировках видов вооруженных сил.
1.2. Задачи, решаемые авиационными комплексами
радиолокационного дозора и наведения
при отражении воздушного нападения
Требования к рубежам вскрытия налета для организации последующего
воздействия по нему современных истребителей можно выполнить только за
счет выноса зон дежурства в направлении главного удара, а также реализации
специальных режимов работы радиотехнических комплексов с повышенной
дальностью обнаружения.
Как правило, АК РЛДН должен находиться во втором эшелоне системы
разведки и предупреждения о воздушном нападении для наращивания назем­
ного радиолокационного противодействия.
При централизованном способе обеспечения информацией командные
пункты районов ПВО необходимо учитывать дополнительные требования,
предъявляемые к рубежам, качеству, достоверности, составу радиолокацион­
ной информации при автоматизированном решении задач управления. Из за­
дач, решаемых командными пунктами ПВО, наиболее критичными к каче­
ству радиолокационной информации являются:
вскрытие направлений ударов средств воздушно-космического нападения
и сосредоточение усилий огневых средств на наиболее опасных направлениях;
назначение средств дальнего действия на цели, подлежащие первоочеред­
ному уничтожению;
отбор целей для выдачи информации командным пунктам (пунктам
управления), необходимой для принятия решений на ведение самостоятельных
боевых действий.
При решении задачи контроля ракетоопасного района показатели каче­
ства и рубежи выдачи траекторной информации должны удовлетворять требо­
ваниям командных пунктов частей (подразделений) при решении задач управ­
ления оружием. Остальные требования к конфигурации создаваемого подвиж­
ного радиолокационного противодействия (зоне информации) определяются с
учетом задач, стоящих перед районом ПВО, и конкретных сложившихся усло­
вий воздушной обстановки [6].
Радиотехнический комплекс межвидового авиационного комплекса раз­
ведки оповещения и управления должен обеспечивать передачу данных целе­
указания непосредственно экипажам самолетов (вертолетов) в воздухе, а также
на пусковые установки (батареи) тактических и оперативно-тактических ракет
сухопутных войск (СВ). При реализации зонного принципа целераспределения
информация о всех объектах, находящихся в зоне приоритетного поражения,
передается на командные пункты, перекрывающие эту зону. При действиях
формирований ВВС и огневых средств СВ вне этих зон целеуказание осущест­
вляется централизованно через группу планирования огневого поражения.
При решении задач непосредственного обеспечения боевых действий
огневых средств (истребительной авиации, зенитных ракетных средств сред­
ней дальности и дальнего действия) требования к пространственным характе­
ристикам радиолокационного противодействия АК РЛДН в значительной мере
определяются характеристиками и тактикой действия средств воздушнокосмического нападения, а также составом и возможностью обеспечиваемых
огневых средств [8].
При решении задач нестратегической ракетной обороны на АК РЛДН
возлагаются следующие обязанности:
ведение в течение заданного периода времени разведки воздушной, ракет­
ной и наземной обстановки на заданных оперативных направлениях;
своевременное вскрытие факта старта, определение координат точек стар­
та, азимута запуска, числа и типов стартовавших нестратегических баллистиче­
ских ракет (НБР), определение параметров их движения;
обнаружение и сопровождение нестратегических ракетных средств и ги­
перзвуковых целей (планирующих головных частей, гиперзвуковых крылатых
ракет, гиперзвуковых самолетов-разведчиков);
разведывательно-информационное обеспечение наземных, корабельных,
воздушных средств борьбы с нестратегическими ракетными средствами напа­
дения (центрами боевого управления нестратегической ракетной обороны, зенитно-ракетными системами и авиационными командными пунктами нестрате­
гических ракетных средств нападения);
выдача целеуказаний ударным самолетам в интересах разведывательноинформационного обеспечения поражения пусковых установок нестратегиче­
ских баллистических ракет на земле.
При этом перспективный АКРЛДН с учетом оснащения радиотехниче­
ским комплексом, оптико-электронными средствами разведки и лазерным
дальномером должен:
обеспечить обнаружение и сопровождение разных типов целей: стартую­
щих нестратегических баллистических ракет, а также гиперзвуковых крылатых
ракет, гиперзвуковых самолетов-разведчиков, планирующих головных частей;
реализовать большую дальность обнаружения нестратегических балли­
стических ракет на активном (восходящем) участке траекторий;
обеспечить границы зоны обзора нестратегических ракетных средств на­
падения на предельной высоте;
обеспечить комплексирование информации на борту от разнотипных ис­
точников бортового комплекса обороны, авиационных командных пунктов, на­
земных РЛС нестратегической противоракетной обороны с формированием
обобщенных трасс полета нестратегических ракетных систем нападения.
1.3. Опыт боевого применения авиационных
комплексов радиолокационного дозора
и наведения (АВАКС) в Югославии и Ираке
Современная концепция применения средств воздушного нападения для
решения стратегических и оперативных задач на театре военных действий
предполагает проведение крупных воздушных наступательных операций, ос­
новным содержанием которых являются эшелонированные массированные
авиационно-ракетные удары с использованием объединенных ВВС.
Схема массированного налета средств воздушного нападения состоит из
трех характерных этапов:
1) формирования эшелонов и подлета к внешней зоне обороны;
2) ее прорыва;
3) полета к объектам удара.
Характерно, что во всех случаях основу боевого порядка группы состав­
ляет пара самолетов. Применение боевого порядка, состоящего из четырех са­
молетов и более, не предусматривается, а боевой порядок группы зависит от ее
тактического назначения. Так, например, для группы прикрытия при полете по
маршруту оптимальным считается боевой порядок «текущая четверка», а для
ударных групп в целях обеспечения свободы маневрирования и требуемой ог­
невой плотности - боевые порядки «пеленг» и «клин».
Наиболее ярко перечисленные особенности применения средств воздушно­
го нападения на современном этапе проявились в конфликтах в Персидском за­
ливе (операции «Буря в пустыне» и «Лиса в пустыне») и на Балканах (операция
«Решительная сила»). В данных конфликтах основным способом боевого приме­
нения авиации была воздушная наступательная операция, которая по взглядам
командования НАТО является высшей формой оперативного применения круп­
ных авиационных объединений по решению наиболее важных оперативно стра­
тегических задач на театре военных действий в ограниченное время.
1.3.1. «Буря в пустыне» 17.01-23.021991 г.. Персидский залив
В рамках операции «Щит пустыни», предшествовавшей операции «Буря в
пустыне», многонациональными силами антииракской коалиции была развер­
нута мощная авиационная группировка. Основу авиационной группировки
межнациональных сил составляли современные ударные самолеты тактической
авиации (F-117, F-16, А-10, F - l l l , F-15E, «Торнадо», «Ягуар», «Мираж»), па­
лубной авиации и авиации морской пехоты (F/A-18, A-6E, AV-8B). Существен­
но повышали ударный потенциал группировки стратегические бомбардиров­
щики В-52. Для борьбы с воздушными целями использовались подразделения
истребителей тактической (F-15) и палубной (F-14 и F-18) авиации. В составе
разведывательной авиации имелись стратегические (RC-135, U-2, TR-1) и так­
тические (RF-4C, F.1CR «Мираж», RF-104) самолеты-разведчики. Средства ра­
диоэлектронной борьбы авиационной группировки были представлены самоле­
тами-постановщиками помех (EF-111A, ЕА-6В). Для уничтожения радиоэлек­
тронных средств систем управления войсками предусматривалось применение
самолетов F-4G. Вся ударная авиация многонациональных сил была оборудо­
вана индивидуальными станциями активных и пассивных помех. Для постоян­
ного наблюдения за воздушным пространством в районе боевых действий была
создана группировка самолетов дальнего радиолокационного обнаружения
(Е-ЗА,Е-2С).
Контроль воздушного пространства и управление авиацией в воздухе
обеспечивали 17 самолетов дальнего радиолокационного обнаружения и
управления Е-3 «АВАКС» ВВС США, НАТО и Саудовской Аравии. К ведению
воздушной разведки привлекались также до 120 самолетов тактической и па­
лубной авиации, в том числе восемь самолетов - ВВС Великобритании и де­
вять - ВВС Франции. Управление всей разведкой многонациональных сил
осуществлял специально созданный объединенный разведывательный центр
штаба объединенного Центрального Командования ВС США, развернутый в
районе г. ЭР-Рияд. В его функции входили планирование, организация и коор­
динация действий разведывательных органов ВС США и их союзников, а так­
же сбор, анализ и доведение добываемых сведений до штабов и войск.
В целом авиационная группировка многонациональных сил к началу бое­
вых действий состояла из 20 стратегических бомбардировщиков, 1465 самоле­
тов тактической авиации и 672 самолетов авиации ВМС. Боевые действия
войск многонациональных сил начались с проведения воздушной наступатель­
ной операции. Построение сил и средств носило классический характер, соответ­
ствующий требованиям «воздушной наступательной операции». Оперативно
тактическое построение авиации в первом массированном ударе состояло из
эшелона прорыва ПВО и ударного эшелона с соотношением сил 32 и 68 % соот­
ветственно от общего числа самолетов, участвующих в ударе (около 600 еди­
ниц). Эшелон прорыва ПВО имел до 40 крылатых ракет морского базирования
(КРМБ) «Томахок» и до 200 боевых самолетов, из них: ударных истребителей 120, истребителей ПВО - 60, самолетов-разведчиков и самолетов радиоэлек­
тронной борьбы - до 20. Эшелон состоял из группы разведки и радиоэлектрон­
ной борьбы, группы расчистки воздушного пространства и группы поражения
средств ПВО. В составе различных групп применялись самолеты EF-111A,
ЕА-6В, F-4G, А-6, F/A-18, «Торнадо», F-117, F-15E, F-16, A-6E. Ударный эшелон
состоял из 60 КРМБ «Томахок», 12 стратегических бомбардировщиков В-52 и
более 400 самолетов тактической авиации. В ходе первого массированного удара
основная часть объектов ПВО была уничтожена или выведена из строя. При на­
несении последующих массированных ударов эшелон прорыва ПВО не форми­
ровался. Всего было выполнено семь массированных авиационных ударов, ос­
новной ударной силой которых являлись самолеты тактической авиации.
Так, например, типовой ударный эшелон состоял из 45 самолетов. В зави­
симости от конкретных задач в его состав входили самолеты сопровождения
F-4 и F-15, ударные самолеты F-16, А-10, F/A-18, A-7, разведывательные самоле­
ты RF-4, самолеты радиоэлектронной борьбы EF-111, F-4G, самолеты заправ­
щики КС-130, КС-10 и самолеты дальнего радиолокационного обнаружения
Е-ЗА. При нанесении ударов по аэродромам противника использовались эшело­
нированные тактические построения, в состав которых входили четыре истре­
бителя сопровождения F-15, до четырех самолетов РЭБ F-4G, 8-12 бомбарди­
ровщиков типа F-16, A-6, F-18 с оружием класса «воздух-поверхность». Основ­
ная задача самолетов сопровождения заключалась в прикрытии ударных групп,
особое внимание обращалось на уменьшение времени перехвата целей на
встречных курсах с первого захода и скорейшее возвращение в состав эшелона.
Основным принципом действия ударных групп являлась простота действий
при достижении высокой точности применения оружия.
В ходе воздушной наступательной операции авиацией многонациональ­
ных сил было выполнено 4700 боевых вылетов (8 % из них - стратегической
авиацией), а также произведено около 230 пусков КРМБ «Томахок». На протя­
жении всего конфликта интенсивно использовались малозаметные самолеты
F-117, которые были задействованы для нанесения ударов по наиболее важным
объектам только в темное время суток с использованием истребителей прикры­
тия F-15 и постановщиков помех. В целом действия авиации многонациональ­
ных сил в первые дни войны представляли собой (судя по задачам, целям, так-
тике действий) крупную воздушную наступательную операцию в самом совре­
менном, классическом ее понятии.
1.3.2. «Лиса в пустыне» 17.12-20.121998 г., Персидский залив
Коалиционная группировка ВВС США и Великобритании в зоне Персид­
ского залива была представлена следующими силами:
от ВВС США: 15 В-52, 6 В-1В, 3 RC-135, 2 U-2R (всего самолетов страте­
гической авиации (СА) - 26); 12 F-117, 42 F-16, 34 F-15, 12 А-10 (всего самоле­
тов тактической авиации (ТА) - 100); а также 11 самолетов радиоэлектронной
борьбы ЕА-6В;
от ВВС Великобритании: 23 «Торнадо», 7 «Харриер».
Операция проводилась в четыре этапа. Основное содержание каждого из
этапов - нанесение массированных авиационно-ракетных ударов с двух на­
правлений. Каждый удар состоял из двух эшелонов:
в первом эшелоне крылатые ракеты обеспечивали поражение объектов
системы ПВО и элементов системы управления;
во втором эшелоне самолеты тактической и палубной авиации наносили
удары по объектам производства и вооруженных сил Ирака.
В ходе операции «Лиса в пустыне» впервые для нанесения ударов по бере­
говым целям применялись палубные истребители F-14, оснащенные навигационно-прицельной инфракрасной системой «Лантирн». Впервые также в реаль­
ных боевых условиях приняли участие стратегические бомбардировщики В-1В.
1.3.3. «Решительная сила» 24.03-10.061999 г., Балканы
В начале агрессии группировка объединенных ВВС насчитывала 292 бое­
вых самолета и впоследствии была увеличена до 638 самолетов (в том числе 29
стратегических бомбардировщиков).
В первые двое суток в рамках операции были нанесены два массирован­
ных авиационно-ракетных удара. Первый проводился по принятой в НАТО ти­
повой схеме и содержал три эшелона: 1) крылатых ракет, 2) прорыва ПВО,
3) ударный.
Пуск крылатых ракет (всего 90 единиц) осуществлялся с трех бомбарди­
ровщиков В-52Н (24 крылатых ракет воздушного базирования (КРВБ)), а также
с надводных кораблей (66 КРМБ).
Эшелон прорыва ПВО насчитывал 75 самолетов, основную часть которых
составляли тактические истребители.
Ударный эшелон имел более 100 самолетов тактической и разведыватель­
ной авиации. Ударные группы, следуя в сомкнутых боевых порядках, осущест­
вляли полет в коридорах с подавленными средствами ПВО (шириной до 50 км)
с дальнейшим расхождением по объектам поражения. Контроль воздушного
пространства осуществляли три самолета Е-ЗА командования дальнего радио­
локационного обнаружения и управления авиацией «АВАКС-НАТО». Второй
массированный авиационно-ракетный удар был проведен по аналогичной схе­
ме. Всего в двух массированных ударах было задействовано 308 самолетов
боевой и вспомогательной авиации, в том числе 5 В-52Н, 4 В-2А, а также более
220 КР. К особенностям применения тактической авиации можно отнести ее
действия на больших высотах (6000...12 000 м) в темное время суток. Это объ­
ясняется обеспечением безопасности полета в условиях мобильных средств
ПВО, а также рельефом местности.
Добившись завоевания превосходства в воздухе, командование альянса
перешло к систематическим боевым действиям с нанесением выборочных и
групповых ударов по целям. В первый месяц самолеты тактической авиации
действовали в составе ударных групп по 8-10 единиц, затем ударная мощь
групп начала увеличиваться и достигла к концу боевых действий 30-40 машин.
Один из вариантов боевого применения ударной группы предполагал наличие
шести ударных F-16 и двух F-15 прикрытия. В целом в качестве носителей
авиационных средств поражения при ударах по наземным целям использова­
лись в основном тактические истребители и штурмовики F-15, F-16, F-18,
F-104, F-117, А-10, «Торнадо», «Ягуар», «Мираж», Харриер».
Основной способ применения стратегических бомбардировщиков В-52Н и
В-1В - нанесение ударов по важным стационарным объектам с использованием
КРВБ. Пуски с них крылатых ракет осуществлялись с малых высот на удале­
нии 150.. .200 км от береговой черты.
Основное назначение самолетов Е-2 и Е-3 в рассматриваемых наступа­
тельных операциях состояло в постоянном контроле воздушного пространства
в интересах:
завоевания и поддержки превосходства в воздухе;
поддержки ударной авиации при действиях по наземным целям;
контроля и управления авиационными группировками.
1.3.4. «Операция «Свобода Ираку» 20.03-15.04 2003 г., Ирак
20 марта 2003 г. ВС США и Великобритании приступили к проведению
операции под условным наименованием «Свобода Ираку», широкомасштабные
боевые действия, в рамках которой они были в основном завершены к 15 апре­
ля 2003 г. Одной из главных особенностей операции стало применение ВС со­
гласно концепции «воздушно-наземная наступательная операция» одновре­
менно с активным привлечением сил специальных операций.
На момент начала операции группировка коалиционных ВВС в зоне кон­
фликта состояла из 524 самолетов стратегической и тактической авиации (в
том числе 47 стратегических бомбардировщиков В-52, В-1В и В-2, 6 Е-3
АВАКС, 10 U-2, 5 КС-135 и 2 Е-8 «Джистарс») и около 420 самолетов палуб­
ной авиации. Следует отметить, что с самого начала система ПВО Ирака прак­
тически была дезорганизована (об этом будет сказано далее), истребительная
авиация ВВС Ирака не применялась, в результате операция проводилась в ус­
ловиях полного превосходства в воздухе одной из сторон.
Активный этап операции «Свобода Ираку» начался рано утром 20 марта
2003 г. с массированных ракетно-бомбовых ударов по территории Ирака КРМБ
«Томахок» с кораблей ВМС США, а также с использования высокоточного
оружия самолетами F-117A и F-15E «Страйк Игл». Всего в ходе первого удара
по объектам ВС Ирака были произведены пуски порядка 40 КРМБ.
Привлечение к участию в первом ударе сравнительно малого числа са­
молетов (144 ударных самолета) объясняется отсутствием необходимости
осуществления прорыва ПВО в широкой полосе пролета боевыми порядками
ТА, поскольку мероприятия по дезорганизации системы ПВО Ирака и подав­
лению ее активных средств на наиболее вероятных направлениях пролета
авиации проводились еще с начала 2003 г. в рамках операций «Нозерн Уотч»
и «Сазерн Уотч» под видом ответных действий на применение огневых
средств ПВО Ирака. Всего до начала операции «Свобода Ираку» было отме­
чено более 170 случаев применения авиации союзников против средств
ПВО Ирака.
Кроме того, более широкому привлечению авиации мешали сложные
погодные условия в южных районах Ирака (песчаные бури и высокая темпера­
тура). В частности, именно поэтому массированные авиационные удары, как
правило, наносились рано утром. Это было вызвано условиями пустынного
климата, характеризующегося резким перепадом температур в ночное и днев­
ное время суток и, как результат, резким ухудшением тяговых характеристик
двигателей при повышении температуры воздуха из-за солнечного прогрева
атмосферы. В результате, в целях увеличения боевой нагрузки ударных само­
летов взлет ударных групп и построение боевых порядков производились в
темное время суток с учетом подлетного времени к целям за 1... 1,5 ч до восхо­
да солнца.
В ходе второго ракетно-бомбового удара вечером 20 марта было задейст­
вовано более 100 самолетов ВВС США и Великобритании, разрушивших наи­
более важные правительственные и военные объекты Багдада. Также с кораб­
лей ВМС было выпущено около 80 ракет по Багдаду и объектам Республикан­
ской гвардии Ирака на севере страны. Ударам также подверглись военные
объекты, расположенные в городах Мосул и Тикрит.
В первую неделю операции авиация союзников совершала от 1500 до 2000
самолетовылетов в сутки, при этом вначале авиация наносила удары по заранее
намеченным наземным целям, затем она использовалась в основном для реше-
ния задач непосредственной авиационной поддержки (НАП). С 25 марта 2003 г.
командование союзной группировки принимает решение об окончании масси­
рованного применения КРМБ «Томахок», после чего до конца активной фазы
операции для нанесения массированных ударов использовались в основном
самолеты стратегической бомбардировочной авиации, тактической и палубной
авиации ВВС и ВМС США и Великобритании.
Одними из первоочередных задач АК РЛДН являются контроль воздуш­
ной обстановки и наведение самолетов истребительной авиации на воздуш­
ные цели противника. При проведении оборонительных операций и в угро­
жаемый период комплексы разведки, оповещения и управления выполняют,
кроме того, функции наблюдения воздушного пространства над сопредельной
территорией и контроля функционального состояния аэродромов, портов,
крупных кораблей, мест дислокации войск и техники, железнодорожных уз­
лов и т. д.
Вследствие отсутствия активности со стороны ВВС Ирака задача по унич­
тожению самолетов противника в воздухе была сведена к организации несения
дежурства по ПВО. Самолеты Е-3 АВАКС в ходе операции «Свобода Ираку» в
основном привлекались к наблюдению воздушного пространства над зоной
боевых действий, а также к вскрытию позиций пусковых установок ЗРК,
имеющих РЛС, поскольку Е-3 оснащен станцией радиотехнической разведки
высокой точности AN/AYR-1.
Всего за период проведения операций «Несгибаемая свобода» и «Свобода
Ираку» самолетами Е-3 из состава 552-го авиакрыла АВАКС Боевого авиаци­
онного командования (БАК) ВВС США было совершено более 325 самолето­
вылетов общей продолжительностью 3275 ч.
1.4. Использование авиационных комплексов
радиолокационного дозора и наведения
при решении антитеррористических и других задач
Террористические нападения, произошедшие 11 сентября 2001 г. в НьюЙорке и Вашингтоне, вовлекли в войну против терроризма не только Соеди­
ненные Штаты, но и весь Североатлантический союз.
Альянс впервые предпринял активные военные действия за пределами Ев­
ропы. Авиация НАТО оказала помощь в организации контроля и наблюдения
за воздушным пространством США, и со временем Североатлантический союз
принял руководство Международными силами содействия безопасности в Аф­
ганистане. НАТО усилила сотрудничество в ряде областей, начиная с взаимо­
действия в области сбора и обмена разведывательной информацией и заканчи­
вая гражданским чрезвычайным планированием новых операций.
По просьбе США, в октябре 2001 г. НАТО предоставила поддержку на
первом этапе коалиционных действий против талибов и Аль-Каиды в Афгани­
стане и согласовала пакет из восьми мер, предусматривающих:
активизацию обмена разведданными;
помощь государствам, находящимся под угрозой вследствие оказания ими
поддержки в рамках действий коалиции;
усиление охраны объектов США и других членов Альянса на их терри­
тории;
выделение сил и средств в качестве замены для сил и средств Альянса,
требующихся для участия в антитеррористических операциях;
предоставление общих прав пролета над территорией;
доступ к портам и аэродромам;
развертывание военно-морских сил НАТО в восточной части Средиземно­
го моря;
переброску самолетов ДРЛО и У АВАКС в США для организации кон­
троля и наблюдения за их воздушным пространством.
9 октября 2001 г. семь самолетов ДРЛО были переброшены в США, чтобы
помочь защитить Северную Америку от аналогичных нападений. Операция
«Игл эссист» продолжалась до 16 мая 2002 г.
С того времени самолеты АВАКС НАТО систематически используются в
числе других мер для обеспечения безопасных условий проведения особо важ­
ных мероприятий, включая встречи в верхах НАТО, Евросоюза и другие встре­
чи высокого уровня. Самолеты ДРЛО также охраняли небо при проведении
крупных массовых мероприятий, включая чемпионат Европы по футболу
2004 г., Олимпийские и Паралимпийские игры в Афинах в 2004 г.
На играх в Афинах применение самолетов АВАКС входило в комплекс­
ную операцию НАТО под кодовым названием «Необычные игры».
Самолеты АВАКС, принадлежащие ВВС США, также постоянно привле­
каются к обеспечению безопасности важнейших международных мероприятий,
проходящих на территории Северной Америки. Так, в ходе саммита стран
«большой восьмерки» (G-8), проходившего в канадской провинции Альберта,
552-е авиа крыло АВАКС ВВС США привлекалось к операции «Гризли», цель
которой состояла в контроле безопасности воздушного движения над территори­
ей проведения саммита. В ходе операции военнослужащими 552-го авиакрыла
было проведено обнаружение и наведение истребителей на перехват двух граж­
данских самолетов, случайно вторгшихся в зону, запрещенную для полетов.
Военно-морская операция НАТО «Актив эндевор» предусматривает кон­
троль и наблюдение за судоходством и сопровождение торговых судов во всем
Средиземном море и в Гибралтарском проливе, в том числе и при помощи са­
молетов АВАКС.
Ряд государств НАТО (в основном Греция, Испания, Италия и Турция)
принимает непосредственное участие в операции путем выделения сил и
средств ВМС и самолетов АВАКС.
В операциях по сопровождению невоенных судов в Гибралтарском проли­
ве участвуют быстроходные патрульные катера, принадлежащие североевро­
пейским государствам - членам Альянса: Германии, Дании и Норвегии, а так­
же самолеты ДРЛО.
Руководители НАТО решили создать собственные силы реагирования
НАТО: многонациональное подразделение быстрого развертывания, состоящее
из сухопутного, воздушного и морского компонентов, а также из компонента
сил специального назначения.
Силы реагирования НАТО могут быть переброшены в любую точку пла­
неты. В связи с этим существенно возрастает роль оперативного наращивания
информационных возможностей, решаемых в том числе и при помощи
АК РЛДН различного назначения. В качестве оказания помощи АК РЛДН мо­
жет быть представлен любому члену НАТО.
Расширенный пакет мер содержит рабочую программу, подготовленную
Конференцией национальных директоров по вооружениям НАТО - руководи­
телей закупочных ведомств государств-членов НАТО - во время их встречи в
мае 2004 г.
Техническая программа государств-членов НАТО, принятая в 2004 г.,
имеет целью развитие новых передовых технологий в области разведки, на­
блюдения и распознавания типов целей при помощи АК РЛДН.
Большая часть выдвинутых в рамках этой программы проектов сосредото­
чена на существующих или новых технологиях, которые могут быть переданы
на вооружение в ближайшем будущем.
1.5. Структура и особенности взаимодействия
авиационных комплексов радиолокационного
дозора и наведения с потребителями информации
Широкая номенклатура разведывательно-информационных, управляющих
и огневых средств требует тесного взаимодействия в реальном масштабе вре­
мени АК РЛДН (рис. 1.1) для обеспечения высокой эффективности применения
данных средств. Все они условно образуют конечное множество потребителей
информации комплекса. При этом имеются разнородные потребители для
АКРЛДН, которые классифицируются как потребители, предъявляющие раз­
личные требования к характеристикам получаемой информации на различных
этапах боевых действий.
Рис. 1.1
Современные комплексы РЛДН, как правило, используются в качестве ис­
точников информации о средствах воздушного нападения (СВН) в реальном
масштабе времени, в частности для обеспечения разведывательной и боевой
информацией разнородных потребителей в системе разведки и предупрежде­
ния о воздушном нападении (СРПВН), при обеспечении информацией КП (ПУ)
группировок ПВО, КП истребительного авиационного полка (ИАП), КП ЗРС
СД-ДД. Их информация применяется в интересах автоматизированного управ­
ления истребителями, в системе управления ПВО флота и сухопутных войск,
подразделений радиоэлектронной борьбы.
Условно разделив весь спектр решаемых АК РЛДН задач по квалифика­
ционному признаку отличий значимости отдельных частных характеристик,
получим различные варианты задания вектора требований к выдаваемой ин­
формации комплекса в интересах потребителей ВС. Так, при решении задач в
системе разведки и предупреждения о воздушном нападении определяемые
значения требуемых пространственных характеристик подвижного радиолока­
ционного поля (РЛП) могут различаться в зависимости от того, на каком стра­
тегическом направлении применяются АК РЛДН и в выработке каких сигналов
предупреждения участвует комплекс. На рис. 1.2 приведены наиболее значи­
мые показатели при решении комплексом РЛДН различных задач в группиров­
ках ВВС.
№
ππ.
1
2
3
4
5
6
7
Задачи разведывательноинформационного обеспечения,
решаемые АК РЛДН
Предупреждение - оповещение
Наиболее значимые показатели
Рубежи обнаружения, точность определения
числа воздушных целей в ударе
Управление наведением и информаци­
онное обеспечение истребителей
Разведывательно-информационное
обеспечение ЗРС
Восстановление наземного радиолока­
ционного поля
Непрерывное сопровождение приори­
тетных целей
Контроль ракетоопасных районов в
группировках ПВО и нестратегической
ПРО
Управление авиационными ударными
комплексами при нанесении ударов по
наземным целям
Количество проводки, рубежи
Точность, достоверность информации
Пространственно-временные характеристики
создаваемого радиолокационного поля
Среднее время непрерывного сопровождения
Пространственно-временные характеристики
контролируемого ракетоопасного района
Пространственно-временные характеристики
зоны контроля наземных целей, точность,
достоверность информации
1
Соотношение уровней требований к информации при решении различных задач РИО
Рис. 1.2
При централизованном способе обеспечения информацией КП группировки
ПВО необходимо учитывать дополнительные требования, предъявляемые к ру­
бежам, качеству, достоверности, составу радиолокационной информации (РЛИ)
при автоматизированном решении в нем задач управления и применения огне­
вых средств по воздушным целям (ВЦ). Из задач, решаемых на КП данной
группировки, наиболее критичными к качеству выдаваемой информации
АК РЛДН являются следующие: вскрытие направлений ударов систем воздуш­
но-космического нападения (СВКН) и сосредоточение усилий огневых средств
на наиболее опасных направлениях; назначение средств дальнего действия на
цели, подлежащие первоочередному уничтожению; отбор целей для выдачи
информации КП (ПУ), необходимой для принятия решений на ведение само­
стоятельных боевых действий.
При решении задачи контроля ракетоопасного района характеристики ка­
чества и рубежи выдачи траекторией информации должны удовлетворять тре­
бованиям КП частей (подразделений) при решении задач управления оружием.
Остальные требования к конфигурации создаваемого подвижного радиолока­
ционного поля (РЛП) (зоне информации) определяются с учетом задач, стоя­
щих перед группировкой ПВО, и конкретных сложившихся условий воздуш­
ной обстановки.
Для формирования требуемых рубежей R относительно АК РЛДН необхо­
димо учитывать вынос зон дежурства комплекса относительно аэродромов ба­
зирования ИА. Реализация групповых полуавтономных действий истребителей
ВВС при перехвате самолетов СА и ТА позволяет существенно снизить требо­
вания к качеству РЛИ.
При использовании АК РЛДН на приморском направлении, где вынос зон
дежурства значительно вперед не представляется возможным, требования к
РЛИ видоизменяются, а именно, уменьшаются по дальности, но увеличиваются
по точности (из-за необходимости фиксации факта пересечения государствен­
ной границы).
Задавшись требуемыми вероятностями вывода в боевое соприкосновение
с целями типа тактического истребителя (ТИ) и стратегического бомбардиров­
щика (СБ), получим варианты задания вектора требуемых характеристик,
предъявляемых к качеству информации АК РЛДН (по точности, непрерывно­
сти сопровождения ВЦ, достоверности РЛИ) при использовании его в режиме
воздушного пункта наведения или организации отбора информации для назем­
ных пунктов наведения (ПН).
Требуемые рубежи выдачи траекторной информации для КП ИАП (отно­
сительно аэродрома базирования) определяются с учетом реализации перехвата
ВЦ на максимальном тактическом радиусе перехвата. При этом учитывается
соотношение скоростей ВЦ и управляемых истребителей на крейсерском и
форсажном режимах полета, а также прогнозируемые временные параметры
перехвата (по времени принятия решения, времени вылета из готовности, вре­
мени выхода в исходную точку наведения и др.). При этом при формировании
требуемых рубежей относительно АК РЛДН необходимо учитывать вынос зон
дежурства комплекса относительно аэродромов базирования истребителей
ВВС (ВМФ). Реализация групповых полуавтономных действий истребителей
при перехвате самолетов СА и ТА позволяет существенно снизить требования
к качеству РЛИ.
Взаимодействующими с АК РЛДН потребителями информации являются
КП ЗРС СД-ДД в режимах готовности к открытию огня и обеспечения загоризонтной стрельбы. При этом в первом случае наиболее жесткие требования
предъявляются к дальности обнаружения ВЦ, а во втором случае - к точности
сопровождения маловысотных целей и крылатых ракет, летящих с огибанием
рельефа местности. Дополнительно информация о воздушной обстановке от
комплексов данного класса может использоваться в информационной подсисте­
ме (ИПС) ЗРС для вскрытия целей-постановщиков активных помех. Это обес­
печивается передачей на КП ЗРС СД-ДД информации о сопровождаемых по
полному вектору параметров целях, находящихся в зоне поражения ЗРС за пре­
делами информационной зоны ИПС ЗРС, и о целях, находящихся в специально
назначенных с КП ЗРС областях получения дополнительной информации о ВЦ.
К основным составляющим вектора характеристик РЛИ, наиболее сущест­
венно влияющим на реализуемую эффективность управления зенитноракетным огнем, относятся следующие показатели выходного информационно­
го потока:
рубеж начала выдачи информации;
среднеквадратические ошибки определения координат и скорости полета
целей;
время разрывов трасс ВЦ;
коэффициент и среднее время существования ложных трасс.
Аналогичным образом, с учетом выполнимости заданной эффективности
действий, формируются требования к информативности другими потребителя­
ми, взаимодействующими с АК РЛДН.
Анализ временных особенностей процессов обеспечения разнородных по­
требителей на различных этапах боевых действий показал следующее. Объек­
тивно существуют определенная эволюция и изменяемость во времени требо­
ваний к информации (по совокупности рассмотренных частных характеристик
АКРЛДН). Поэтому для реализации потенциальных разведывательно-инфор­
мационных возможностей комплексов в условиях ресурсных, информацион­
ных и временных ограничений необходимо введение с более высокого уровня
иерархии соответствующего координирующего управления, задающего наибо­
лее предпочтительные режимы выдачи информации на различных этапах при­
менения.
Сложность обеспечения разнородных потребителей в комплексах РЛДН
состоит в том, что диапазон предъявляемых различающихся требований к ин­
формации может иметь большой размах, а технические возможности их удов­
летворения АК РЛДН ограничены. Поэтому при реализации согласованного
размена характеристик выходного информационного потока (ВИП) появляется
возможность повысить эффективность обеспечения разнородных потребителей
информации на различных этапах боевых действий. Сущность его заключается
в реализации в системе, использующей АК РЛДН, механизмов управляемости
характеристиками [6], достигаемыми одновременно как целенаправленным пе­
рераспределением (разменом) ВИП на различных этапах работы, так и адапта­
цией к изменяющимся параметрам целевой и помеховой обстановки [4].
1.6. Показатели эффективности применения
авиационных комплексов радиолокационного
дозора и наведения
С позиций системного анализа показатели эффективности АК РЛДН должны
либо количественно характеризовать эффективность надсистемы обеспечиваемых
им потребителей (КП различного уровня, огневых средств), либо быть связаны с
ними монотонной зависимостью. Дополнительно к ним предъявляются следую­
щие требования: ясный физический смысл, формализуемость и вычисляемость для
типовых прогнозируемых условий применения комплекса.
Основными показателями, определяющими разведывательно-инфор- ,
мационные и управляющие возможности АК РЛДН, являются следующие:
время барражирования комплекса и выдачи информации на заданном ру­
беже удаления от аэродрома базирования;
типы и классы обнаруживаемых и сопровождаемых воздушных (надвод­
ных), наземных целей и нестратегических ракетных средств нападения, воз­
можности их распознавания;
дальности обнаружения и выдачи трасс заданного класса (типа) целей
конфигурации создаваемых подвижных полей информации и управления;
зона видимости комплекса в азимутальной и угломестной плоскостях над
различными типами подстилающей поверхности;
максимальное число обнаруживаемых и сопровождаемых целей, точности
определения их координат;
перечень управляемых с борта авиационных средств, максимальное число
автоматизированных каналов наведения;
типы взаимодействующих с комплексом потребителей информации КСА
и Π (ПУ) группировок ВС, дальность связи и передачи данных с борта
АКРЛДН.
Эффективность применения комплекса РЛДН зависит от выбранного ва­
рианта самолета-носителя, районов применения, условий огневого и радио­
электронного противодействия. В табл. 1.1 показана взаимосвязь характери­
стик самолета-носителя с показателями эффективности АК РЛДН [5].
Таблица 1.1
№
пп.
1
2
3
4
Связь характеристик самолета-носителя
с показателями, определяющими
«эффективность применения и эксплуатации»
АК РЛДН
Скоростные V характеристики (макси­ Время начала выполнения боевой задачи на
мальная, крейсерская скорости, скорость заданном рубеже
набора высоты и др.)
Высотные характеристики Η (максималь­ Дальность прямой видимости, уровень альная, минимальная, крейсерская высота тиметровых помех, информативность БРЛС
и ОЭС комплекса
и др.)
Временные характеристики Τ дежурства Продолжительность выполнения поставлен­
(применения) на различных рубежах уда­ ных задач комплексом РЛДН на заданном
ления от аэродрома базирования
рубеже
Максимальный взлетный вес, массогаба- Допустимый вес бортового РТК, геометри­
ритные ограничения Р П О л х ^ г х ^ в н а ческие размеры внедряемых антенн, число
размещаемую аппаратуру бортового РТК автоматизированных рабочих мест и лиц
боевого расчета и связанные с ними инфор­
мационные и управляющие возможности
комплекса
Учитываемые характеристики
самолета-носителя
5
Радиолокационная (оптическая)
ность σ(ΐ 0 ) самолета-носителя
замет- Выживаемость комплекса в условиях огне­
вого противодействия
6
Эксплуатационные характеристики Эх Назначенный ресурс, длительность жизнен­
самолета-носителя, время Тп предполет­ ного цикла, оперативность повторного при­
ной подготовки
менения АК РЛДН
Покажем иерархию обобщенных и частных показателей, определяющих
эффективность комплекса в группировках ВС. При этом учитывается, что кон­
струкции обобщенных и частных показателей эффективности зависят от возла­
гаемых на АК РЛДН задач и свойств используемых их надсистем.
Сравнение вариантов можно осуществлять по вкладу комплекса в эффек­
тивность группировок (Е) видов ВС, по обобщенным показателям разведыва­
тельно-информационных и управляющих возможностей (вероятность РВт вы­
хода истребителей в точку пуска ракет, математическое ожидание числа ус­
пешных выводов истребителей в зону возможных атак M[N3BA]), по частным
характеристикам информативности, например дальности, точности и досто­
верности выдаваемой потребителям информации (R, σχγ, КЛт)· Так, примени­
тельно к задачам разведывательно-информационного обеспечения и управле­
ния боевыми действиями в группировках ПВО на основе метода целевой ко-
ординации возможны варианты вертикальной и горизонтальной декомпозиции
различных показателей эффективности, учитывающие варианты применения в
группировках АК РЛДН в качестве радиотехнического поста (рис. 1.3) и
воздушного пункта наведения (рис. 1.4). Предложенную систему показателей
можно использовать для сравнения альтернативных вариантов и синтезаанализа данных средств, так как она скоординирована с оптимизируемыми по­
казателями боевой эффективности группировки ПВО при отражении ударов
средств воздушного нападения и учитывает принятую иерархию взаимодейст­
вия в ней.
Рис. 1.3
Рис. 1.4
Для адекватного исследования функционирования АК РЛДН предлагается
использовать систему показателей боевых возможностей, представленную на
рис. 1.4. При этом оценкой на верхнем уровне возможностей комплекса РЛДН
может быть его вклад в конечную эффективность боевых действий, например
группировки ПВО. Для традиционно используемых показателей предотвра­
щенного ущерба (У) и математического ожидания числа перехваченных ВЦ по
прогнозируемым вариантам удара СВН (М) можно оценить вклад комплекса в
конечную эффективность (АУ, ΔΜ) следующим образом:
где Vp+мАк - векторная функция, определяющая показатели боевой эффектив­
ности по отражению удара СВН при использовании в группировке ПВО
АК РЛДН; VP - то же, но без применения комплекса АК РЛДН; V0o - вектор
весовых коэффициентов, характеризующих важность объектов обороны; Сг векторная функция, характеризующая состав группировки, принятую систему
управления, боевые возможности огневых средств и др.; ξΓ - векторная функ­
ция, характеризующая изменяющиеся условия боевой работы, а именно, удар
СВН (состав, характеристики, тактику боевого применения средств), прогнози­
руемые радиоэлектронное и огневое противодействие и т. д.
В качестве обобщенного показателя разведывательно-информационных
возможностей АК РЛДН принимается вероятность РВт выполнения комплексом
требований Υ τ , предъявляемых к нему взаимодействующим потребителем.
Вектор Υχ требований к информации (по дальности обнаружения заданного
класса целей, точности оценки координат, длительности сопровождения, до­
пустимом времени сопровождения ложных трасс и др.) рассчитывается для за­
данного уровня эффективности Y^i потребителем с учетом возможных (прогно­
зируемых) внешних условий ξ. е Ωξ работы [3]. Тогда искомая оценка веро­
ятности выполнения требований зависит от режима функционирования fr
комплекса и определяется путем интегрирования восстановленных совместных
плотностей распределения Wy ' частных характеристик его информативности:
где YP - вектор реализуемых характеристик выходного информационного по­
тока для установившегося режима работы; Ωγ (Υ τ ) - область допустимых
значений данных характеристик, обеспечивающих заданный уровень эффек­
тивности взаимодействующего потребителя.
Разведывательно-информационные возможности данных средств на более
нижних уровнях с учетом принятых вариантов обеспечения, например для
группировки ПВО, можно описать представительным (однозначно определяю­
щим эффективность обеспечиваемых потребителей) вектором характеристик. С
учетом специфики создаваемых подвижных зон информации АКРЛДН и из­
меняемости характеристик ВИП (VHn) множество частных характеристик ин­
формативности представим в виде следующих показателей:
где
- вектор пространственно-временных характе­
ристик формируемых зон информации (
- реализуемые конфигу­
рации областей соответственно постоянного и периодического контроля, АТС продолжительность существования формируемой зоны информации относи­
тельно текущего времени);
- вектор точностных
характеристик выдаваемой информации (σ χ γ , σΗ - погрешности оценки соот­
ветственно плоскостных координат и высоты, σψ - погрешности оценки курса
движущихся объектов);
- вектор характеристик пол­
ноты информации (Ν^ ах ' - максимальное число сопровождаемых целей, АТС относительная продолжительность непрерывного сопровождения целей (опре­
деляется в обратном масштабе времени), ΔΤΡ - относительная продолжитель­
ность разрыва трасс);
- вектор характеристик
достоверности ВИП (Клыц, КЛтс - коэффициенты ложных трасс соответственно
по числу и относительному времени сопровождения, АТЛТ - относительное
время существования ложных трасс); РЗВАЬ Rrii - вероятность и рубеж пере­
хвата истребителями приоритетных воздушных целей при управлении с борта
АК РЛДН; РЗВА2, Rm - вероятность и рубеж перехвата самолетов стратегиче­
ской (тактической) авиации; Р3ВАЗ, Rro - вероятность и рубеж перехвата стра­
тегических крылатых ракет (СКР); РЗВА4, Rn4 - вероятностные и рубежные ха­
рактеристики перехвата при управлении истребителями с борта многофунк­
ционального АК РЛДН в условиях радиоэлектронного и огневого
противодействия ΝΚΗ&ΒΙ ·
В зависимости от решаемых задач, динамики изменения требований к ин­
формативности, типа обеспечиваемого потребителя, состав учитываемых зна­
чимых характеристик в векторах
может быть различным.
Оценка разведывательно-информационных и управляющих возможностей
АК РЛДН проводится на фоне различных вариантов удара СВН, прогнозируе­
мых в зоне действия комплекса. В интересах организации управления истреби­
телями с борта комплекса и оценки альтернативных вариантов построения бор­
товых систем управления наведением оценивается следующее:
максимально реализуемое число одновременных наведений истребителей
на воздушные цели командным способом, методом тактического управления, в
том числе в условиях радиоэлектронного и огневого противодействия;
возможность управления с борта комплекса заданного перечня истребите­
лей с адаптацией к их боевым возможностям и используемым авиационным
средствам поражения;
вероятность наведения при командном наведении истребителя на воздуш­
ные цели с использованием различных методов наведения;
возможность обеспечения заданной дальности и требуемых характеристик
всех видов связи комплекса с летательными аппаратами и взаимодействующи­
ми АСУ. ,
Для снижения размерности общей задачи организации боевых действий
системы в зоне (районе) ПВО с заданной (максимальной или реализуемой) эф­
фективностью выполняется ее декомпозиция с выделением первого уровня
оценок эффективности применения комплекса по отдельным задачам управле­
ния. К этим оценкам относится оценка производительности бортовой системы
управления и наведения АКРЛДН, использующая обобщенный показатель,
представляющий собой математическое ожидание числа успешных выводов
истребителей в зону с борта комплекса возможных атак (ЗВА). Он определяет­
ся при помощи следующего упрощенного выражения:
где ΚΣ = КуКбКэн (К у - коэффициент качества управления, Кб - коэффициент
живучести, КЭн - коэффициент эксплуатационной надежности);
вероятность выхода истребителя в информационный контакт с целью (Р н - ве­
роятность выхода истребителя в зону атак и пуска ракет); ТПц - время полета
цели от рубежа обнаружения до заданного рубежа перехвата; t0np - время от
момента обнаружения цели до принятия решения на боевые действия истреби­
телей, t3BA - среднее время вывода истребителей в зону возможных атак целей,
Νκ - число каналов управления (наведения).
При реализации с борта АК РЛДН координатной поддержки управляемых
истребителей и организации так называемого тактического управления ими в
качестве частных показателей целесообразно использовать:
математическое ожидание числа перехваченных ВЦ истребителем с ис­
пользованием информации от АК РЛДН
прирост реализуемых рубежей перехвата истребителей при использовании
тактической информации от комплекса процент перехваченных целей истребителями по внешнему ЦУ от ком­
плекса РЛДН из состава удара СВН процент ложных наведений из общего числа по недостоверной информа­
ции от АК РЛДН Введенная система показателей эффективности основана на декомпозиции
процессов обеспечения потребителей информации и управления огневыми
средствами с учетом особенностей исследуемого варианта АК РЛДН и района
его применения. Она позволяет оценить разведывательно-информационные и
управляющие возможности комплекса с учетом его использования как в вари­
антах радиотехнического поста, воздушного пункта наведения, так и в совме­
щенном режиме.
1.7. Состав авиационных комплексов радиолокационного
дозора и наведения и режимы их функционирования
Основным источником информации в АК РЛДН о воздушных и надвод­
ных (морских) целях (ВЦ) является бортовая радиолокационная станция. Подъ­
ем станции на авиационный носитель позволяет существенно (по сравнению с
наземными РЛС) увеличить дальности обнаружения низколетящих ВЦ за счет
увеличения дальности радиогоризонта. При этом условие радиовидимости це­
ли (К г = 1), находящейся на малой высоте и дальности Яц относительно ком­
плекса, определяется условием
где
- эквивалентный ра­
диус Земли, 8ц - угол места ВЦ, Η - высота полета самолета-носителя
АКРЛДН.
Подвижность БРЛС и необходимость сопровождения воздушных объектов
(ВО) на фоне мощных отражений зондирующих сигналов от подстилающей
поверхности определяет построение и требует специальных алгоритмов обра­
ботки отраженных сигналов, что приводит к наличию информационных огра­
ничений при обнаружении ВЦ.
Рассмотрим принципы построения комплекса РЛДН на примере раз­
работанного в КР «Вега» АК А-50 с радиотехническим комплексом (РТК)
«Шмель» [1]. Обобщенная структурная схема РТК, содержащая собственно
БРЛС, систему государственного опознавания (СГО), системы активного за­
проса-ответа и передачи команд (САЗО-СПК), командную радиолинию (КРУ),
бортовую вычислительную систему (БВС), бортовой комплекс средств связи
(БКСС) и автоматизированные рабочие места (АРМ), представлена на рис. 1.5.
Бортовая РЛС АК РЛДН А-50 работает в импульсно-доплеровском режиме
с высокой частотой повторения импульсов при обнаружении воздушных целей
и в импульсном режиме с низкой частотой повторения импульсов - при обна­
ружении надводных целей [1].
Рис. 1.5
Для рассматриваемого варианта комплекса характерны следующие ин­
формационные ограничения его БРЛС:
сжатие зоны обнаружения под воздействием помех по боковым лепесткам;
слепой сектор в направлении хвостового оперения самолета-носителя;
сжатие зоны обнаружения под воздействием помех по боковым лепесткам
в альтиметровом секторе;
зона режекции целей, летящих с минимальной радиальной скоростью.
Подавление помехи, вызванной отражением зондирующих импульсов
подстилающей поверхности, проводится методом частотной селекции, учиты­
вающим разницу доплеровских сдвигов частоты от подстилающей поверхности
и от воздушной цели.
Обработка радиолокационного сигнала в БРЛС АК РЛДН А-50 комбини­
рованная: на первом этапе - при помощи дискретно-аналогового устройства с
кварцевыми фильтрами, на втором этапе - при помощи цифровых режекторов
и доплеровских фильтров (быстрое преобразование Фурье). Устройство вы­
полнено в виде спецвычислителя. В ЦВМ БРЛС проводятся группирование по
элементам дальности отметок, относящихся к одной цели; измерение азимута и
угла места; расчет однозначной дальности до цели по отметкам на двух или
трех частотах повторения; формирование информации для отображения борт­
инженеру БРЛС и выдачи в бортовую вычислительную систему; а также авто­
матизированный контроль технического состояния аппаратуры РЛС.
Бортовая радиолокационная система может работать в смешанном режи­
ме, в котором несколько обзоров работы в квазинепрерывном режиме череду­
ются с обзором в обычном импульсном режиме с большой частотой повторе­
ния. Это позволяет вести одновременную работу по обнаружению как воздуш­
ных, так и надводных целей.
Антенна БРЛС АК РЛДН А-50 расположена во вращающемся вместе с ан­
тенной обтекателе. Связь антенны с аппаратурой, расположенной внутри фю­
зеляжа, осуществляется через многоканальный СВЧ-вращающийся переход и
низкочастотное контактное вращающееся устройство. По такому же принципу
организована связь с антеннами госопознавания и радиолиний управления.
Бортовая вычислительная система (БВС) представляет собой четырехмашинную систему. Каждая из ЦВМ под управлением операционной сис­
темы обеспечивает обработку данных в реальном масштабе времени. Машины
БВС связаны между собой и в процессе работы обмениваются информацией. В
качестве внешних абонентов на БВС замыкаются все элементы РТК: БРЛС, ап­
паратура госопознавания, телекодовая аппаратура радиолиний связи, аппарату­
ра отображения, аппаратура командных радиолиний управления и др., которые
являются как информационными датчиками, так и потребителями информации.
Программное обеспечение БВС позволяет решать задачи в автоматиче­
ском и диалоговом с членами экипажа РТК режимах. Аппаратура РТК подклю­
чена к бортовой вычислительной системе таким образом, чтобы можно было
продолжить работу без физических переключений в случае выхода из строя от­
дельных элементов.
Аппаратура отображения АК РЛДН А-50 [1] является основным элемен­
том рабочего места членов экипажа РТК. Формирование информации для ото­
бражения ее на АРМ производится с учетом индивидуальных требований чле­
нов экипажа РТК (масштаб отображения, вид отображения, селекция по при­
знакам). При помощи функциональных кнопок и цифробуквенной клавиатуры
проводится ввод команд по изменению режимов работы аппаратуры отображе­
ния, а также команд управления решением задачи и управления аппаратурой,
сопряженной с БВС.
Отображение информации на индикаторах тактической обстановки офице­
ров боевого управления представляет собой «подвижную картину в неподвиж­
ной раме», при которой вся воздушная и другая обстановка, включая отметку
собственного АК РЛДН, отображается в единой системе координат относи­
тельно заранее определенной условной точки. Когда операторы сопровождения
наблюдают первичные отметки с выхода бортовой РЛС, то их отображение
может накапливаться на экране в течение некоторого регулируемого операто­
ром интервала времени. Поэтому на экране возникают следы трасс целей.
Ложные же отметки разбросаны на экране случайным образом.
Трассовая обработка информации о целях проводится на проходе по дан­
ным от БРЛС и других информационных датчиков. Возможны автоматическое
сопровождение целей по траекториям их движения как с автоматическим нача­
лом этого сопровождения (режим «Автозахват»), так и с началом сопровожде­
ния по командам оператора, и полуавтоматическое сопровождение, при кото­
ром оператор начинает сопровождение и корректирует работу автомата.
Трассовая информация о целях выдается в систему оповещения и борто­
вую систему управления наведением. При формировании информации опове­
щения АСУ, с которой взаимодействует АКРЛДН, по командам оператора
возможен отбор целей по заданным признакам (например, отбор по высоте, по
признаку «свой-чужой» или другим признакам). При передаче на АСУ расчет
декартовых координат цели производится относительно условной точки с ис­
пользованием текущих декартовых координат самолета-носителя А-50, полу­
ченных путем пересчета его географических координат.
При передаче информации на АСУ через спутниковую радиолинию связи
в БВС проводятся расчет текущего положения спутника связи (по заложенной
в память БВС траектории спутника) и вычисление (с учетом текущего место­
положения самолета А-50) пеленга на этот спутник для управления антенной
спутниковой линии связи.
Бортовая система управления наведением является частью программного
обеспечения БВС. Она позволяет решать задачи приборного всеракурсного на­
ведения истребителей-перехватчиков всех типов, находящихся на вооружении,
на воздушные цели и вывода фронтовой (морской) авиации в район наземных
(надводных) целей [1]. При решении этих задач проводится формирование ко­
манд управления, докладов и донесений о процессе наведения взаимодейст­
вующей АСУ. Бортовая вычислительная система и ее программное обеспече­
ние построены таким образом, что отказ любой из ЦВМ не приводит к отказу
системы, а только снижает ее функциональные возможности.
Система активного запроса-ответа и передачи команд позволяет визировать
истребители-перехватчики, оборудованные ответчиками КРУ, в целях уточне-,
ния их координат для передачи на борт команд управления при наведении.
В момент визирования с борта истребителя-перехватчика может быть
принята информация о состоянии его системы вооружения. Приемная часть
аппаратуры САЗО-СПК, включая систему обработки принятых ответных сиг­
налов, скомплексирована с приемной частью аппаратуры госопознавания.
Бортовой комплекс средств связи в РТК «Шмель» представляет собой со­
вокупность телекодовых и оперативно-командных радиолиний KB, МВ-ДМВ и
сантиметрового диапазонов волн, что обеспечивает ведение двухсторонней
оперативно-командной радиосвязи в радиотелефонном режиме с КП АСУ, со­
седними самолетами А-50, истребителями, а также обмен телекодовой инфор­
мацией. Антенны средств связи расположены в различных точках самолета,
что позволяет получить наилучшую электромагнитную совместимость.
Для успешного решения широкого спектра задач разведывательноинформационного обеспечения по воздушным и надводным целям в АК РЛДН
используются следующие режимы.
1. Режим высокой частоты повторения импульсов, являющийся основным
режимом БРЛС комплекса. Он характеризуется частотой повторения импульсов
10...30 кГц с вобуляцией частоты повторения в пределах одной азимутальной
пачки для устранения неоднозначности по дальности. Обеспечивает обнаружение
воздушных целей над любыми видами подстилающей поверхности и однозначное
измерение скорости при высокой точности определения азимута. Недостатками
режима являются возникновение комбинаторных отметок на ложных дальностях
со снижением вероятности обнаружения отметок на истинных дальностях при на­
личии нескольких целей в пределах азимутальной пачки и энергетические потери
на устранение неоднозначности по дальности.
2. Режим с низкой частотой повторения импульсов, характеризуемый вы­
сокой точностью и однозначностью определения дальности воздушных целей.
Режим позволяет обеспечить повышенную дальность обнаружения загоризонтных воздушных целей. При сжатии импульсов обеспечиваются разрешение от­
дельных целей в группе и необходимая средняя мощность излучения. Однако
режим не обеспечивает подавления отражений от сложных подстилающих по­
верхностей, поэтому обнаруживает только цели, находящиеся за горизонтом.
3. Режим низкой частоты повторения импульсов БРЛС для обнаружения мор­
ских (надводных) целей в пределах радиогоризонта. Для уменьшения влияния от­
ражений от взволнованной морской поверхности используются достаточно широ­
кополосные сигналы с высокой разрешающей способностью по дальности. Режим
обеспечивает высокую точность и однозначность измерения дальности. Недостат­
ком режима является невозможность обнаружения наземных целей.
4. Режим пассивной локации, позволяющий пеленговать постановщики
активных помех (ПАП) главным лучом с компенсацией приема по боковым ле­
песткам диаграммы направленности антенны БРЛС.
Возможно использование комбинированных режимов, например второго и
третьего.
Основными отличительными характеристиками структуры РТК А-50 яв­
ляются следующие [5]:
мощное бортовое когерентное радиолокационное передающее устройство,
обеспечивающее формирование квазинепрерывных зондирующих сигналов;
система приема и обработки отраженных от цели сигналов, способная ре­
шать задачи обнаружения и автоматического сопровождения воздушных целей
во всем современном диапазоне их полета и надводных целей вплоть до радио­
горизонта;
вращающаяся в большом (десятиметровом) обтекателе над фюзеляжем
самолета антенна кругового обзора, создающая управляемый луч, необходи­
мый для решения задач обнаружения и сопровождения ВЦ;
цифровой вычислительный бортовой комплекс, по своей мощности сопос­
тавимый на период создания АК РЛДН с наземными вычислительными цен­
трами. Это позволило создать бортовую автоматизированную систему управ­
ления силами и средствами перехвата воздушных целей;
комплекс оперативно-командных радиолинии и многоканальные системы
дальней связи, включая спутниковые.
Для расширения разведывательно-информационных возможностей, уве­
личения числа классов и типов обнаруживаемых целей в составе перспектив­
ных АК РЛДН целесообразно использовать не один, а несколько информаци­
онных датчиков (рис. 1.6), в том числе станцию радиотехнической разведки
(РТР), оптико-электронную станцию (ОЭС), радиолокатор с синтезированием
апертуры (PCА). Это позволяет повысить уровень многофункциональности
комплекса, устойчивость обнаружения и сопровождение различных типов и
классов целей, а также улучшить условия их распознавания.
Рис 1.6
Большие скорости и высоты полета нового класса целей для АК РЛДН, ко­
торыми являются воздушно-космические цели и нестратегические баллистиче­
ские ракеты (НБР), ограниченное время работы двигательной установки (нахож­
дения на активном участке), применение комплексов средств преодоления ПВО
затрудняют обнаружение и сопровождение данного класса целей. Поэтому в
перспективные комплексы целесообразно внедрять оптико-электронную систему
с лазерным дальномером (рис. 1.6) и БРЛС с использованием специальных ре­
жимов обработки и комплексирования информации. Это позволит обеспечить
устойчивое обнаружение и сопровождение НБР при различных условиях наблю­
даемости их на траекториях полета в сложных условиях ракетной обстановки.
Подсистемы и функциональные связи ОЭС и БРЛС в составе АК РЛДН
показаны на рис. 1.7.
Рис. 1.7
Для достижения высоких разведывательно-информационных и управ­
ляющих возможностей РТК АК РЛДН должен быть многофункциональным и
использовать несколько информационных датчиков и режимы комплексирования и совместной обработки информации.
Литература
1. Бабич В. К, Баханов Л. Е., Карпеев В. И. и др. Авиация ПВО России и научно-технический
прогресс. Боевые комплексы и системы вчера, сегодня, завтра. / Под ред. Е. А. Федосова. М.: Дрофа, 2001.
2. Вайпан С. К, Вакуленко Α. Α., Кузьмин Г. В., Яголъников С. В. Метод конфликтно-устой­
чивого выбора режима функционирования радиотехнического комплекса в изменяющихся
условиях. - Радиотехника, 1996, № 1 1 .
3. Вайпан С. 77., Вакуленко Α. Α., Рюмшин А. Р. и др. Выбор показателя эффективности для син­
теза многофункциональных систем. - Радиотехника, 1997, № 1 1 .
4. Верба В. С. Метод управления информативностью авиационного комплекса, взаимодейст­
вующего с разнородными потребителями информации. - Радиотехника, 2006, № 1.
5. Верба В. С. Тенденции развития авиационных и космических средств информационной раз­
ведки и дозора. - Наукоемкие технологии, 2004, №№ 8,9.
6. Верба В. С, Вакуленко Α. Α., Дод В. 77. Принципы управления многофункциональными ин­
тегрированными радиоэлектронными системами в динамике конфликта со средствами радио­
электронного подавления. - Радиотехника, 2005, № 5.
7. Гандурин В. Α., Кирсанов А. 77. Особенности зоны обнаружения низколетящих воздушных
объектов доплеровской радиолокационной станции. - Радиотехника, 2007, № 10.
8. Реутов А. 77. Радиопромышленность. - Наукоемкие технологии, 2006, № 7-8.
ГЛАВА 2
ПРИНЦИПЫ ПОСТРОЕНИЯ БОРТОВОЙ
РАДИОЛОКАЦИОННОЙ СИСТЕМЫ АВИАЦИОННОГО КОМПЛЕКСА
РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
2.1. Функциональные задачи и структурная схема
бортовой радиолокационной системы
Комплекс АК РЛДН А-50М (НПО «Вега») и аналогичный комплекс
АВАКС ЕЗА (Боинг) используют БРЛС в качестве основного источника ин­
формации для решения задач контроля воздушной и надводной обстановки:
на любом ТВД;
круглогодично;
круглосуточно;
независимо от погодных условий и естественной освещенности, наличия
дыма и пыли;
непрерывно либо с заданной частотой обращения;
на больших удалениях и в широкой зоне наблюдения (зоне ответственно­
сти), в том числе вне зоны ПВО противника;
скрытно от противника;
в условиях радиоэлектронной борьбы (РЭБ), с учетом электромагнитной
совместимости (ЭМС);
в реальном масштабе времени с передачей данных на КП и наводимые са­
молеты.
Радиолокационная система многофункционального комплекса должна
обеспечивать решение множества разнородных задач, часть из которых особо
сложные, что предъявляет ряд высоких требований к аппаратной части и про­
граммному обеспечению.
Основные функциональные задачи, решаемыми БРЛС в настоящее время,
[5,9,13,14,16]. "
1. Обнаружение воздушных целей, в том числе низколетящих, малораз­
мерных, малозаметных (крылатые ракеты, вертолеты, летательные аппараты
(ЛА), выполненные по технологии СТЭЛС, беспилотные летательные аппара­
ты (БЛА)) на фоне земной поверхности на больших дальностях, вплоть до
радиогоризонта. Типовыми характеристиками комплексов типа АВАКС
(РЛДН) при решении этих задач являются:
зона обзора по азимуту - круговая, с равномерным просмотром за Тобз=10 с ;
зона обзора по углу места (+5...15°) с просмотром многолучевой либо со
сканированием однолучевой диаграммой направленности антенны;
скорость полета целей 100.. .4000 км/ч;
дальность обнаружения низколетящих целей:
с ац =3...10 м2: 300...350 км
с ац =0,5...1,0 м2: 200...250 км.
2. Оценка координат обнаруженных целей:
точность измерения координат азимута σΘ = 0,5°, угла места σφ = 5°, даль­
ности σΓ= 100 м.
3. Разрешение групповых целей:
по азимуту σΘ = 1,0°, по углу места σφ = 5°; по дальности σΓ = 150 м.
4. Обнаружение воздушных целей в свободном пространстве (загоризонтные цели):
дальность обнаружения <зц = 30.. .60 м2: 550.. .650 км;
разрешение и точность такие же, как и по низколетящим целям.
5. Обнаружение морских (надводных) целей во всей зоне ответственности
(до радиогоризонта) при любой степени волнения моря, определение коорди­
нат и селекции движущихся целей:
дальность обнаружения катера (ац = 50... 100 м ) в штиль до радиогори­
зонта при волнении пять баллов: 300.. .350 км;
точность измерения координат: азимута σΘ = 0,5°, дальности σΓ = 30 м.
6. Радиотехническая разведка в частотном диапазоне РЛС, пеленгация ис­
точников помех.
Полученные данные обнаружения целей и оценки их координат исполь­
зуются в системе вторичной обработки для сопровождения целей и формиро­
вания команд наведения на цель.
Решение перечисленных функциональных задач потребовало разработки
многофункциональной, многорежимной импульсно-доплеровской (когерентноимпульсной) БРЛС [10,13].
Под когерентностью импульсно-доплеровского радиолокационного тракта
понимается априорное знание закона изменения фазы отраженного целью сиг­
нала от одного импульса к другому в пачке импульсов. Линейное изменение
фазы соответствует доплеровской частоте сигнала, пропорциональной ради­
альной скорости движения цели.
Различие доплеровских частот сигналов движущейся цели и неподвижно­
го фона позволяет селектировать (выделять) движущиеся цели, наблюдаемые
на фоне земной поверхности.
Узкополосная доплеровская фильтрация отраженных сигналов соответст­
вует накоплению энергии сигнала цели и повышению отношения сигнал/шум.
Дискриминатор доплеровской частоты сигнала позволяет оценивать сдвиг
частоты, обусловленный движением цели, и определять с высокой точностью
скорость сближения (удаления) цели относительно БРЛС.
Высокое разрешение сигналов по доплеровской частоте определяет воз­
можность разрешения целей в группе по различию их радиальных скоростей.
Высокая помехозащищенность БРЛС обеспечивается не только сверхниз­
ким уровнем боковых лепестков диаграммы направленности антенны, но и по­
давлением (селекцией) пассивных помех (облаков дипольных отражателей) и
активных шумовых помех за счет узкополосной доплеровской фильтрации
принимаемых сигналов.
Импульсный характер излучения импульсно-доплеровской БРЛС позволя­
ет измерять дальность до цели по величине задержки отраженного импульса и
использовать единую антенну на передачу и прием.
В зависимости от максимальной дальности и радиальной скорости целей в
импульсно-доплеровской БРЛС различают три режима частот повторения им­
пульсов.
Режим высокой частоты повторения (ВЧП) обеспечивает однозначное
измерение радиальной скорости цели Уц. Доплеровская частота сигнала цели
, где знак «+» соответствует сближению цели с БРЛС, а знак «-» удалению. Следовательно, полоса частот
С учетом того, что на
каждом периоде повторения импульсов БРЛС фазовый детектор формирует два
независимых отсчета (синусную (sin) и косинусную (cos) составляющие сигна­
ла), для однозначного соответствия радиальной скорости цели и частоты бие­
ний сигналов фазового детектора согласно теореме отсчетов необходимо, что­
бы
или
. При этом условие однозначного соответст­
вия задержки сигнала и дальности цели
не выполняется, так как
высокие скорости воздушных целей определяют необходимость использования
высоких частот повторения. Для устранения неоднозначности измерения даль­
ности цели используются дополнительные режимы излучения на нескольких
различных частотах повторения.
Режим низкой частоты повторения (НЧП) обеспечивает однозначное
измерение дальности цели и неоднозначное измерение скорости. Такой режим
используется для наблюдения загоризонтных и надводных целей, когда отра­
женные сигналы от подстилающей поверхности отсутствуют или они малы.
Так, при наблюдении загоризонтных целей доплеровская фильтрация не ис­
пользуется, а измерение скорости проводится по изменению задержки сигнала.
В режиме средней частоты повторения наблюдается неоднозначность
одновременно и по дальности, и по скорости цели.
Структурная схема БРЛС, характерная для комплексов АВАКС (РЛДН),
представлена на рис. 2.1. Поскольку сведения об элементах структуры БРЛС и
их технических характеристиках взяты из открытых опубликованных источни­
ков (книг, статей, рекламных проспектов), реальные данные комплексов могут
отличаться от рассматриваемых далее.
Рис. 2.1
Когерентность радиолокационного тракта обеспечивается единым для
всех сигналов высокостабильным задающим генератором 1. Обычно исполь­
зуют кварцевый генератор 60... 100 МГц с термостабилизацией и изоляцией от
механических колебаний. Возможно применение нескольких генераторов раз­
личной частоты колебаний, охваченных обратной связью по фазе (фазовая ав­
топодстройка). Излучаемые сигналы, сигналы гетеродинов, промежуточных
частот, частот модуляции, а также импульсы синхронизации работы всех бло­
ков, формируются путем умножения-деления частот задающих генераторов в
блоках синтезатора сигналов 2 и синхронизатора 3.
Зондирующий сигнал формируется путем усиления и модуляции сигнала
синтезатора. После предварительного усиления сигнала малой мощности (блок 4),
он подается через цифровой регулятор мощности (аттенюатор 5) на возбуди­
тель (усилитель средней мощности 6). Уровень сигнала возбудителя и, соответ­
ственно, мощность излучаемого зондирующего сигнала, регулируются в зави­
симости от угла места (дальности) зоны обзора.
Импульсный модулятор 7 и выходной усилитель мощности 8 обеспечива­
ют требуемую импульсную мощность излучаемого сигнала. В качестве выход­
ного усилителя мощности используют клистроны импульсной мощностью
до 1 мВт при средней мощности до 15 кВт.
Блок 9 формирует высоковольтное напряжение питания (до 90 кВ) с ма­
лым уровнем пульсаций для исключения паразитной фазовой модуляции зон­
дирующего сигнала.
Сформированный высокочастотный импульс через вращающийся переход
коаксиального типа поступает на группу работающих на передачу и прием фа­
зовращателей 10, обеспечивающих фазовое управление положением диаграм­
мы направленности антенны по углу места (сканирование и стабилизацию при
маневре носителя).
Обычно используется антенна волноводно-щелевого типа. Волноводы
длиной 7...8 м (в S-диапазоне) обеспечивают узкую (~1°) диаграмму направ­
ленности по азимуту. В вертикальной плоскости антенны размещаются 28 та­
ких волноводов, образуя апертуру антенны по углу места размером 1,5 м и
формируя диаграмму направленности шириной 5°. Каждый волновод питает­
ся от своего фазовращателя. Главное требование к диаграмме направленности
антенны - низкие максимальный и интегральный уровни боковых лепестков,
так как они определяют мощность сигнала фона, на котором ведется обнару­
жение сигналов низколетящей цели. Так, средний уровень боковых лепестков
может быть -40 дБ, а минимальный - до 55 дБ. Для обеспечения такого низ­
кого уровня используют специальное амплитудное распределение по аперту­
ре антенны.
Прием отраженных сигналов ведется той же антенной, что и передача.
Система фазовращателей 10 обеспечивает одинаковое положение луча на пере­
дачу и прием. При быстром сканировании по углу места и большой дальности
обзора отраженные сигналы запаздывают и приходят тогда, когда приемная
диаграмма направленности оказывается смещенной относительно направления
облучения и, соответственно, прихода отраженной волны. Для компенсации
этого смещения положение приемной диаграммы направленности управляется
дополнительной системой фазовращателей 11. Сигналы управления формиру­
ются в блоке 12.
Отраженные от целей и фона электромагнитные волны принимаются ан­
тенной и высокочастотные сигналы через систему фазовращателей 10, 11
поступают на вход приемника 14. Мощное излучение передатчика и импульс­
ных источников помех бланкируется системой защиты 13, имеющей до пяти
ступеней для подавления помех различного уровня мощности.
Главной особенностью высокочастотного приемника является использо­
вание на входе малошумящего усилителя с коэффициентом шума 3...5 дБ, что
обеспечивает прием всех типов сигналов целей: низколетящих и загоризонтных воздушных целей, надводных целей, а также помеховых сигналов в диапа­
зоне работы БРЛС.
Сигналы с выхода СВЧ-приемника через вращающийся переход разделя­
ются и поступают на три различных супергетеродинных приемника с двойным
преобразованием частоты.
Импульсно-доплеровский приемник 15 формирует на выходе усилителя
промежуточной частоты sin- и cos-составляющие сигнала (фазовый детектор).
Стробы, определяющие длительность импульса (0,5...1,5 мкс), разделяют
сигналы по каналам задержки (дальности). В каждом канале проводится преоб­
разование аналоговых sin- и cos-сигналов в цифровую форму (АЦП), которые
поступают для дальнейшей обработки в сигнальный процессор 16. Система
слежения за сигналом фона 17, принимаемого по основному лепестку диаграм­
мы направленности антенны, обеспечивает необходимыми данными для обра­
ботки сигналов процессор.
Сигнальный процессор детектирует по частоте помеховые сигналы фона,
принимаемого по главному лучу диаграммы направленности антенны. Полоса
фильтра определяется шириной спектра сигнала фона в основном луче и со­
ставляет обычно несколько килогерц. Уровень сигнала фона по отношению к
уровню внутреннего шума приемника (динамический диапазон фона) зависит
от многих факторов (типа подстилающей поверхности, вида зондирующего
сигнала, формы диаграммы направленности антенны) и обычно составляет ве­
личину 70...80 дБ. Для подавления такого уровня фона иногда применяют сис­
тему из двух ступеней: сначала в аналоговом виде при помощи кварцевых
фильтров, а затем в цифровом виде процессором.
Наряду с сигналом фона происходит подавление и сигналов целей, летя­
щих с небольшой радиальной скоростью. Граница частот фильтра режекции
определяет минимальную радиальную скорость обнаруживаемых воздушных
целей на фоне отражений от земной поверхности.
Вне зоны режекции фильтра уровень мощности спектра фона определяет­
ся уровнем боковых лепестков частотной характеристики фильтра и диаграм­
мы направленности антенны, а вне полосы спектра фона - уровнем внутренне­
го шума приемника. Выбирая параметры сигнала (частоты повторения), харак­
теристики фильтра и формируя сверхнизкий уровень боковых лепестков
диаграммы направленности антенны, стараются обеспечить прием сигналов
цели во всем частотном диапазоне сигналов целей (скоростей целей).
Дальнейшая обработка сигнальным процессором сводится к доплеровской
фильтрации и формированию матрицы сигналов «задержка - доплеровская
частота», формированию порога с постоянным уровнем ложных тревог и обна­
ружению сигналов по превышению порога сигналами в каналах матрицы. Дан­
ные обнаруженных сигналов «задержка-частота» передаются через интерфейс
в процессор данных 18, который определяет координаты и состояние целей для
передачи в центральный процессор комплекса.
Приемник сигналов загоризонтных целей 19 выполняет в аналоговом ви,де сжатие импульсов обычно при помощи ультразвуковой линии задержки,
детектирует и сравнивает выходной сигнал с порогом, определяемым уров­
нем внутреннего шума приемника и внешними помехами. Порог регулирует­
ся для обеспечения постоянства вероятности ложной тревоги. После преобра­
зования в цифровую форму информация об обнаруженных целях передается в
процессор данных.
Приемник надводных целей 20 осуществляет сжатие импульсов при по­
мощи линии задержки для получения высокого разрешения по дальности, что
позволяет обнаруживать малоразмерные надводные цели при большой степени
волнения моря. Обнаружение сигнала проводится после детектора огибающей
по превышению порога, регулируемого в зависимости от уровня отражений от
морской поверхности для обеспечения постоянства ложных тревог. АЦП и
микропроцессор 21 обеспечивают режекцию сигналов суши с использованием
цифровой карты 22. Сигналы обнаруженных целей поступают через интерфейс
в процессор данных.
Структурная схема содержит также глубокую встроенную систему диаг­
ностики и поддержания работоспособности за счет дублирования основных
блоков (на рисунке не показана).
2.2. Энергетический потенциал
бортовой радиолокационной системы
Эффективность решения всех задач радиолокационного наблюдения: об­
наружения целей, определения их координат, распознавания, идентификации
функционального состояния и сопровождения, в значительной мере зависит от
энергии принимаемого сигнала и спектральной плотности шумов.
Энергия сигнала Ес зависит от средней мощности принимаемого сигнала
Рс с учетом всех потерь в тракте РЛС ап и от времени когерентного накопления
сигнала в системе обработки Тс
где Рср - средняя мощность излучения передатчика; G - коэффициент усиле­
ния передающей антенны;
- плотность потока мощности излу­
чения у цели на расстоянии Дц ;
- плотность потока мощности от­
раженного сигнала у антенны;
- мощность переизлучения цели с
эффективной поверхностью рассеивания (ЭПР)
- мощность прини­
маемого сигнала антенной, имеющей апертуру площадью Sa.
Суммарные потери мощности сигнала ап формируются составляющими
потерь во всех элементах тракта РЛС (рис. 2.2).
Рис. 2.2
Время когерентного накопления сигнала определяется временем обзора
Тобз заданного углового сектора Ω:
где Θ0Φ0 - угловой размер диаграммы направленности антенны по азимуту
Θ0 и углу места Ф0 ( Θ 0 Φ 0 Ω - в стерадианах).
С учетом того, что
энергия сигнала
Отношение сигнал/шум при согласованной обработке сигнала равно от­
ношению сигнал/шум на выходе линейной части системы обработки при рав­
номерной спектральной плотности шумов в пределах спектра сигнала
N0 = const. При учете только внутреннего шума приемника N0 = kTFm , где
κΤ = 4·10 Вт/Гц, Fm - фактор шума приемника.
В этом случае отношение сигнал/шум
Из представленного выражения следует, что энергетическая характери­
стика сигнала цели (Рс/Рш) в режиме обзора на первый взгляд не зависит от
длины волны БРЛС. В то же время каждый из параметров РЛС, среды распро­
странения и цели существенным образом определяется длиной волны.
В режиме слежения цели при заданном времени обработки сигнала тс от­
ношение сигнал/шум
также лишь косвенно зависит от длины волны.
Однако коэффициент усиления антенны
зависит от λ, его макси­
мальное значение определяется возможностью обеспечения требуемой точности
амплитудно-фазового распределения поля по раскрыву антенны. С увеличением
отношения размера антенны к длине волны άα/λ требования к точности выдержи­
вания распределения поля по апертуре возрастают, особенно для бортовой РЛС,
где значительно влияют вибрации и изгибные колебания фюзеляжа самолета, из­
менения температуры и давления, отражения от элементов конструкции самолета
и др. Максимальные значения коэффициентов усиления реальных бортовых ан­
тенн РЛС в широком диапазоне частот изменяются в пределах 30.. .40 дБ и опре­
деляются в основном возможностью размещения антенны на борту самолета.
В рассмотренном случае помехи типа «белого шума» отношение Рс/Рш не
зависит от вида модуляции зондирующего сигнала и определяется только
средней мощностью сигнала. При помехах другого типа (отражения от земной
и водной поверхностей, имитирующие активные помехи, пассивные преднаме­
ренные помехи) Рс/Рш зависит и от вида сигнала и от типа помехи, что требует
оптимизации модулирующей функции зондирующего сигнала и обработки
принимаемого сигнала.
При решении задач измерения параметров цели и получения высокого
разрешения также необходимо оптимизировать вид сигнала.
Далее рассматриваются характеристики элементов радиолокационного
тракта, определяющие энергетический потенциал БРЛС.
2.3. Радиолокационные характеристики целей
23.1. Радиолокационные характеристики воздушных целей
В качестве основных (типовых) воздушных целей обычно рассматриваются:
стратегические бомбардировщики В-52Н, В-IB, B-2A;
многоцелевые истребители F-22A, EF-2000;
истребители-бомбардировщики F-35A, «MHpa>K-2000N,D»;
палубные истребители-штурмовики F-18A, «Рафаль М»;
патрульный самолет Орион Р-ЗВ;
крылатые ракеты воздушного базирования ALCM-D AGM-86-D, FCM
AGM-129F;
крылатые ракеты морского базирования «Томахок» BGM-109;
оперативно-тактические ракеты АТАКМАС;
беспилотные летательные аппараты (Б Л А).
В многочисленных опубликованных открытых материалах (справочниках,
монографиях, рекламных статьях) приводятся различные характеристики воз­
душных целей, часто значительно различающиеся.
Ниже используются оценочные значения характеристик с учетом исследо­
ваний автора.
В табл. 2.1 приведены ТТХ самолетов, определяющие их ЭПР, динамиче­
ские и статистические свойства отраженных сигналов.
Самолеты обычной конструкции и БЛА имеют ЭПР от 100 до 0,1 м в Xдиапазоне (табл. 2.2).
Таблица 2.1
Длина, м
Размах
крыла,
м
В-52Н
48
56,4
В-1В
44,8
41,67
В-2А
21,03
52,43
F-22A
19,55
13,1
EF-2000
15,96
10,85
Рафаль Μ
15,3
10,9
F-35A
15,47
10,7
Мираж 2000
14,36
9,13
F-18A
17,1
11,4
Р-ЗВ
БЛА MQ-9
35,61
10,97
30,37
20,12
Тип
самолета
Максимальная
скорость:
на высоте
у земли
1050
675
1500
ИЗО
1000
765
2350
1400
2200
1300
1900
1390
2000
1300
2350
1400
1900
1300
780
405
Пото­
лок,
км
15
Макси­
Минималь­
мальная
ная высота, м перегрузка,
ед.
150-300
2,5
16
60-150
2,5
15,2
60-150
2,7-3,7
19
50
9
18
50
9
18
50
9
16
50
9
18
50
8
15,2
50
8
20
13,7
50
2,5
-
-
Таблица 2.2
Воздушная цель
Х-диапазон
ЭПР, м2
Р-диапазон
В-52
125
10
С-130
80
10
Р-ЗВ
14
10
F-18A
11
10
F-16
3
3
БЛА
0,1
0,5
С увеличением длины волны РЛС от λ = 3 до λ = 70 см (Р-диапазон) ЭПР
самолетов большого размера уменьшается (рис. 2.3). Так, ЭПР стратегического
бомбардировщика В-52 уменьшается в 10 раз, а ЭПР истребителя почти не из­
меняется.
Рис. 2.3
Беспилотные летательные аппараты, так же как и крылатые ракеты, уве­
личивают ЭПР при возрастании длины волны. При облучении в переднем сек­
торе и изменении длины волны от λι κ λ2 ЭПР возрастает по закону
Использование технологии СТЭЛС (специальная конструкция самолета,
поглощающие покрытия) значительно снижает ЭПР целей. В табл. 2.3 пред­
ставлены возможные значения ЭПР целей разрабатываемых самолетов как
обычной технологии, так и технологии СТЭЛС в Х-диапазоне.
В длинноволновых L-, Р-диапазонах эффективность радиопоглощающих
покрытий резко падает, а широкополосные покрытия имеют недопустимо
большие геометрические размеры (толщину и массу). Так, например, покрытие
МХ-1, обеспечивающее поглощение 25 дБ только в Х-диапазоне, имеет толщину
Таблица 2.3
Класс СВН
Стратегическая авиация:
обычный, Стеле
Тактическая авиация:
обычный, Стеле
Армейская авиация
Авиация ВМС
Военно-транспортные
самолеты
Самолеты ДРЛО и У
Е-ЗС/Е-2С
БЛА
Значения ЭПР, м
λ = 3 см
λ = 10 см
70/0.3...3
75/0.3...5
80/1...30
70/1...30
100/0.5... 10
120/0.5...10
4/0.1...0.5
4/0.1...0.5
5/0.5...0.7
6/0.5-0.7
5/0.2...0.4
5/0.2...0.1
5...13
6...13
9...30
10...30
3...10
6...10
4...9
4...12
6...16
6...23
4...5
6...13
90...250
90...300
100...350
100...350
80...250
80...200
50/18
50/20
80/35
70/35
100/15
80/15
0.05
0.05
0.3
0.4
0.15
0.2
Ракурс,
град
±45 (нос)
±45 (борт)
±45 (хвост)
±45 (нос)
±45 (борт)
±45 (хвост)
±45 (нос)
±45 (борт)
±45 (хвост)
±45 (нос)
±45 (борт)
±45 (хвост)
±45 (нос)
±45 (борт)
±45 (хвост)
±45 (нос)
±45 (борт)
±45 (хвост)
±45 (нос)
±45 (борт)
±45 (хвост)
λ = 40 см
60/0.5... 10
60/1...40
90/0.5...20
6/0.2...0.7
9/0.5...0.7
8/0.2...0.4
7...12
10...12
7...10
6...7
9...14
5...7
100...400
150...400
80...350
50/20
70/40
70/15
0.2
0.5
0.3
2 мм и массу 7 кг на квадратный метр. Широкополосное покрытие NZ-1 обес­
печивает поглощение 20 дБ в Х-, Р-диапазонах, но имеет толщину 25 мм и мас­
су 41 кг на квадратный метр.
Следует выделить «самолет-невидимку» В-2А, в котором максимально
использованы все достижения технологии СТЭЛС и получен наиболее низкий
уровень ЭПР в Х-диапазоне 10 -2 ... 10_3 м2 (оценочные значения). С увеличени­
ем длины волны, начиная с λ = 30 см, эффективность технологии СТЭЛС сни­
жается и при λ = 70 см ЭПР возрастает на 10.. .20 дБ.
Типовые характеристики крылатых ракет воздушного и морского базирова­
ния представлены в табл. 2.4. Оперативно-тактическая ракета типа АТАКМАС
имеет длину 3,98 м и диаметр 0,61 м.
Таблица 2.4
Тип
Длина, м
Размах крыла, м
Скорость, км/ч
AGM
AGM
Томахок 5
6,32
6,35
5,56
3,65
600...900
600...900
600...900
зд
2,5
Минимальная
высота, м
60... 100
30...200
30...100
15 над водой
В табл. 2.5 представлены оценочные значения ЭПР ракет, полученные
расчетным путем.
Таблица 2.5
Тип
AGM-86fl
ТОМАХОК
АТАКМАС
Сектор углов, град
λ = 3 см
λ = 10 см
λ = 23 см
0±45
0,15
0,2
0,5
90±45
1,5
4,0
0±45
0,15
1,5
0,3
90±45
0,5
2,0
2,5
0±45
0,01
0,02
0,03
90±45
0,26
0,36
0,54
0,4
При относительно небольшом разрешении, характерном для БРЛС ком­
плексов типа АВАКС, воздушная цель является точечной. Она имеет один эк­
вивалентный фазовый центр отражения, определяемый векторной суммой
электромагнитных волн всех отражателей.
Амплитуда
где ση - конкретное значение ЭПР n-й точки функции
отражения цели, и фаза φη - фаза этой точки, являются случайными величина­
ми. Распределение плотности вероятности случайной фазы равновероятное
(0...2π), а распределение амплитуды зависит от типа цели и условий наблюде­
ния. Обычно распределение амплитуд считают рэлеевским, а распределение
ЭПР - экспоненциальным.
Так как воздушная цель при наблюдении в переднем секторе содержит не­
сколько преобладающих по мощности отражателей (сопла двигателей, антен­
ны, кромки крыльев и т. п.), распределение плотности вероятности ЭПР иногда
представляют функцией «хи-квадрат с четырьмя степенями свободы»):
Случайное значение ЭПР цели σ есть модуль результата векторного сло­
жения комплексных амплитуд сигналов N отражателей:
Среднее значение ЭПР цели ац есть сумма ση средних значений ЭПР N
точек:
Временные характеристики сигналов, отраженных воздушной целью, оп­
ределяются в основном изменением вектора скорости цели относительно РЛС
комплекса. При постоянном векторе скорости сигнал имеет доплеровскую час­
тоту, определяемую радиальной составляющей скорости цели V r :
Полоса частот сигнала в этом случае зависит от времени когерентной об­
работки Тс
При маневрировании цели и случайном изменении вектора скорости цели
полоса доплеровских частот сигнала определяется случайным (для БРЛС) ра­
диальным ускорением цели:
В результате возможное время когерентной обработки сигнала Тс должно
быть меньше интервала корреляции сигнала xk :
Результаты экспериментальных исследований [11] полосы частот отра­
женного сигнала в Х-диапазоне приведены ниже для одиночных, умеренно ма­
неврирующих самолетов (при отсутствии маневра случайная величина ради­
ального ускорения равна 0,1.. .0,2 g):
Самолет
МИГ-23
СУ-27
МИГ-31
Полоса частот, Гц
24,8
18,63
8,0
Распределение плотности вероятности радиального ускорения и, соответ­
ственно, ширины полосы частот имеет вид гауссовой кривой, СКО ширины
Af для одиночных самолетов равно 10 Гц. Полосы доплеровских частот от­
раженных сигналов при групповом полете самолетов составляют (СКО шири­
ны полосы частот для группы целей примерно равно 6 Гц):
Вид маневра
Стационарный полет группы
Маневр группой
Afqm
10,8
16,6
Догон в группе
11,35
При увеличении длины волны полоса частот уменьшается обратно про­
порционально 7λ:
что позволяет увеличивать время когерентного накопления при переходе от
λ = 3 κ λ = 7εΜΒ пять раз.
Облако полуволновых диполей как ложная цель имеет объемную удель­
ную ЭПР
где N - число диполей в одном кубическом метре (обычно меньше одного - трех).
Эффективная площадь рассеяния ЭПР облака диполей объемом Уд, если
элемент разрешения РЛС больше облака, определяется равенством
Временные характеристики отраженного от облака сигнала определяются
СКО скоростей движения диполей σν .
Корреляционная функция сигнала облака диполей
Типовая величина СКО скоростей движения диполей σ ν =0,5.. .1,0 м/с.
Крупные стаи птиц (10 птиц в одном квадратном метре площади) могут
создавать ложные отметки цели. Средняя величина ЭПР птицы (средний вес
50... 100 г) зависит от диапазона волн. Так, в Х-диапазоне σ π =10" м, в
S-диапазоне σ π = 0 , 5 · 1 0 ~ 3 Μ 2 и Р-диапазоне σπ=2·10~5Μ2. ЭПР крупной стаи
птиц в S-диапазоне может иметь ац = 0,5 м2 [5].
Скорость движения стаи птиц в основном определяется скоростью ветра и
в среднем составляет 5... 10 м/с.
2.3.2. Радиолокационные характеристики
морских целей
Основные (типовые) морские цели и их характеристики представлены в
табл. 2.6.
Величины ЭПР целей получены путем усреднения известных данных и
расчетным путем для Х-диапазона волн и горизонтальной поляризации.
Таблица 2.6
Морские цели
Авианосец типа Нимитц
Крейсер типа Тикондерога
Фрегат типа Перри
Катер Пегас
Подводная лодка, всплывшая
Длина, м
332,8
171,7
135,6
40,5
300
Ширина, м
78,4
16,8
13,7
8,6
30
ЭПР с носа, м2
4-105
610 3
3-Ю3
180
10
ЭПР с боку, м2
3-Ю6
3-Ю5
3-Ю4
1800
200
С увеличением длины волны ЭПР уменьшается. Коэффициенты уменьше­
ния представлены ниже:
Диапазон волн
X
S
L
Ρ
Коэффициент уменьшения ЭПР
1,0
0,8
0,4
0,2
ЭПР морских целей уменьшается также при волнении моря 5...6 баллов
примерно в два раза и при вертикальной поляризации - в 1,5 раза.
При волнении моря корабль рыскает по курсу и испытывает бортовую и
килевую качку, которая носит периодический характер. Угол отклонения ко­
рабля от нормального положения определяется соотношением
где Тк - период колебаний.
Соответственно, периодически изменяются фаза и доплеровская частота
отраженного сигнала.
Временные характеристики сигнала (период колебаний), отраженного от
крупных морских целей, определяются конструкцией корабля и не зависят от
степени волнения моря.
Для крейсера период колебаний составляет 5...15 с, а для авианосца 10...35 с [13]. С уменьшением водоизмещения корабля период колебаний име­
ет случайный характер и зависит от степени волнения моря.
Колебания по курсу, крену и килю можно считать узкополосным случай­
ным процессом. Интервал корреляции отраженного сигнала в Х-диапазоне со­
ставляет 0,5...1,0 с. С ростом длины волны пропорционально увеличивается и
интервал корреляции.
Распределение плотности вероятности ЭПР целей полагают равным хиквадрату с четырьмя степенями свободы.
Как и у воздушных целей, наблюдается тенденция уменьшения ЭПР
за счет специальной конструкции корабля и использования поглощающих ма­
териалов.
233. Радиолокационные характеристики наземных целей
Развитие техники АК РЛДН предполагает решение задач радиолокацион­
ного наблюдения всех классов целей, в том числе малоразмерных наземных.
Характеристики основных малоразмерных наземных целей (размеры и ЭПР),
усредненные по многим типам целей, представлены в табл. 2.7 (Х-диапазон). В
S- и L-диапазонах ЭПР изменяется незначительно, а в Р-диапазоне - возрастает
в два-три раза.
Таблица 2.7
Размеры,
мχм
ЭПР, м2
Танки, БМП
7x4
4...20
Автомобиль, тягач
7x3
7-15
Пусковая установка ракет
10x5
20-40
Истребитель на стоянке
12 χ 17
3-15
Бомбардировщик на стоянке
50 χ 40
20-100
Наземные цели
При наблюдении целей, размеры которых превышают размер элемента
разрешения РЛС, в качестве ЭПР цели используют ЭПР элемента разрешении
цели σ 3 , которая определяется отношением геометрической площади цепи Su к
площади элемента разрешения 8Sn:
Групповые цели (стоянка самолетов, танковые подразделения, батареи ра­
кет и т. п.) характеризуются расстоянием между элементами цели в местах со­
средоточения 70...120 м и на марше 30...50 м, а также максимальной скоро­
стью движения (40 км/ч).
Самолеты на стоянке в зависимости от типа располагаются на расстояниях
40...75 м.
Время корреляции отраженного сигнала при движении наземной цели оп­
ределяется прежде всего рельефом местности. Так, сигнал, отраженный от тан­
ка, двигающегося по пересеченной местности, имеет интервал корреляции
0,2.. .0,3 с в Х-диапазоне.
С ростом длины волны время корреляции пропорционально увеличива­
ется.
Статистические характеристики (распределение вероятностей) ЭПР мало­
размерных наземных целей определяются законом «хи-квадрат» с четырьмя
степенями свободы.
2.3.4. Радиолокационные характеристики земной и водной поверхностей
Эффективная площадь рассеяния земной и водной поверхностей характери­
зуется удельной величиной σ0 ЭПР одного квадратного метра. В табл. 2.8 пред­
ставлены величины удельной ЭПР различной земной и водной поверхностей, ус­
редненных по многим справочным данным и собственным исследованиям.
Таблица 2.8
Объекты
Море, волнение
2 балла
Море, волнение
6 баллов
Взлетно-посадочная
полоса
Степь, зима, снег
Степь, лето, трава
Пустыня, камни,
песок
Лес
λ = 70 см
Угол
падения
λ = 3,0 см
λ = 10 см
λ = 23 см
гг
вв
ГГ
ВВ
ГГ
ВВ
ГГ
ВВ
10
-40
-32
-А2
-40
^15
^5
-50
-50
20
-38
-28
-39
-35
-40
-40
-45
^5
50
-35
-30
-36
-33
-38
-36
-35
-А2
10
-35
-30
-33
-30
-30
-30
-35
-35
20
-30
-25
-29
-25
-29
-25
-32
-32
50
-27
-22
-27
-22
-28
-23
-30
-30
-40
-35
^5
-40
-60
-60
Ί
10
^0
-30
20
-32
-24
-35
-30
-40
-36
-58
-58
50
-20
-18
-25
-23
-30
-27
-55
-55
10
-23
-23
-35
-35
-33
-35
-60
-60
20
-17
-17
-30
-30
-30
-30
-55
-55
50
-14
-14
-23
-23
-23
-23
-50
-50
3
-35
-35
-35
-35
-40
-40
-60
-60
10
-16
-16
-20
-20
-28
-28
-55
-55
20
-15
-15
-19
-19
-25
-25
-53
-53
50
-12
-12
-16
-16
-20
-20
-50
-50
10
-18
-20
-30
-35
-35
-35
-45
^15
20
-15
-17
-28
-33
-30
-30
-40
^0
50
-12
-14
-15
-15
-15
-17
-35
-35
10
-14
-14
-21
-22
-25
-23
-35
-35
20
-14
-15
-20
-21
-20
-18
-30
-30
50
-12
-12
-14
-14
-14
-14
-25
-25
Величина σ0 определяется в основном соотношением размера неровно­
стей поверхности и длины волны, а также углом падения и поляризацией
волны.
Неоднородности поверхности по высоте h характеризуются СКО высоты
ah и радиусом корреляции rh . Радиус корреляции значительно больше СКО
высот: rh = K h o h . Ниже даны значения Kh для типовых местностей [13].
Тип местности
Лес
Луг с кустарником
Степь
Пустыня
Лед серый...
Kh
2
5
6
8
15
Если размер неоднородностей меньше длины волны, то рассеяние имеет
диффузный характер.
При размере неоднородностей, сравнимых с длиной волны, наблюдается
резонансное отражение, как, например, у полуволнового диполя.
При больших размерах неоднородностей отражение имеет сложный ха­
рактер взаимодействия различных волн, поэтому характеристики отражения
реальных поверхностей обычно получают экспериментальным путем.
При уменьшении угла φΗ падения волн на поверхность (φΗ <10°) величина
σο ровных поверхностей падает пропорционально sin φΗ. На рис. 2.4 в качестве
примера представлены графики изменения σ0 в зависимости от φΗ сельскохо­
зяйственных районов местности средних широт.
С увеличением длины волны (L-, Р-диапазона) начинаются изменения
характера отражения от земной поверхности. Геометрические размеры неод­
нородностей поверхности и ее внутренней структуры оказываются меньше
или соизмеримыми с длиной волны. Рассеяние от мелкоструктурных поверх­
ностей (ВПП, степь) имеет диффузный характер, и удельная ЭПР резко пада­
ет (рис. 2.5).
При расчете характеристик комплексов Е-2 и Е-3 использовались модели
изменения ЭПР различной местности во всем диапазоне углов <рн, усредненные
по многим экспериментальным данным (рис. 2.6, 2.7) [6].
Рис. 2.4
Рис. 2.5
Рис. 2.6
Удельная ЭПР (σ0) больших участков земной поверхности представляет
собой пространственно неоднородный случайный процесс.
При обнаружении малоразмерных целей на фоне отражений от земной по­
верхности в режиме однозначного измерения дальности и азимута в пределах
зоны расположения групповых целей удельную ЭПР можно считать кусочнооднородным процессом (степь, ВПП, лес, море и т. п.) В пределах расположе­
ния целей удельная ЭПР постоянна.
Рис. 2.7
В режиме обнаружения низколетящих целей при высокой и средней час­
тотах повторения сигнал фона является суммой сигналов многих разнесенных
по дальности и углу элементов земной поверхности, имеющих разные значе­
ния σ0.
При использовании различных моделей распределения плотности вероят­
ности удельной ЭПР земной и водной поверхностей в Х-, S-диапазонах (Вейбулл, Гамма, К, экспонента, логнормальный) обычно получают сравнимые ре­
зультаты (в пределах ошибок экспериментальных измерений ЭПР), поэтому
часто используют экспоненциальную модель удельной ЭПР фона:
Кроме равномерного фона, структура поверхности имеет отдельные не­
ровности (ямы, канавы, бугры, стволы крупных деревьев). Так как шерохова­
тость поверхностей таких неоднородностей мала по сравнению с длиной волны
в L-, Р-диапазонах, их изображение становится подобным точечному объекту
со стабильным фазовым центром. Наличие таких «зеркальных» точек в функ­
ции отражения однородного случайного поля изменяет распределение плотно­
сти вероятности удельной ЭПР.
При разрешении 20...50 м число таких неровностей в степи (точек изо­
бражения) составляет 2 5 ^ 5 на 1 м2, при этом ЭПР точек στ больше ЭПР рав­
номерного фона σφ на 10...15 дБ [12].
Распределение амплитуд отраженных сигналов фона и точек подчиняется
рэлеевскому закону с различными дисперсиями DT и Όφ. Вероятность больших
амплитуд имеют точечные отражатели. Отношение дисперсий Ότ/Όφ зависит от
типа местности и разрешающей способности РЛС и равно 8... 12.
В результате распределение амплитуд отраженных от земной поверхности
сигналов в L-, Р-диапазонах равно сумме двух рэлеевских распределений. «Би­
модальный рэлеевский» закон распределения амплитуд для РЛС Е-2 (λ = 70 см)
имеет вид [5]
где
Временные характеристики удельной ЭПР земной и водной поверхно­
стей определяются прежде всего скоростью ветра W, от которого зависят сте­
пень волнения моря и скорость колебаний крон деревьев и кустарников. Оце­
ночные значения СКО скоростей морской поверхности и деревьев соответст­
венно равны
9-
Полоса частот отражаемых сигналов
В S-, Р-диапазонах работы РЛС спектр отраженных сигналов находится в
пределах единиц герц.
Кроме случайных составляющих скорости движения морской поверхности с
СКО, равным σ ν , существуют элементы разрешения с регулярным движением
волны в направлении РЛС, формирующие точечные квазикогерентные отражате­
ли с временем корреляции 0,1...0,5 с. Если плоскость морской волны направлена
по нормали к направлению излучения, то ЭПР такого отражателя в Х-диапазоне
намного превышает средний уровень отражения. Такие стабильные отражатели
увеличивают вероятность ложной тревоги и имеют название «долбяки».
2.4. Характеристики среды распространения
электромагнитных волн
Основными параметрами среды распространения, определяющими харак­
теристики БРЛС, являются степень затухания (поглощения) волны, отклонение
от прямолинейности распространения (рефракция) и фазовые флуктуации вол­
ны, обусловленные неоднородностью среды распространения.
Затухание волны определяется как свойствами среды, так и длиной пути
распространения волны от РЛС до цели и обратно в слое атмосферы и дождя
(рис. 2.8).
Рис. 2.8
Длина пути в атмосфере ограничена дальностью прямой видимости и за­
висит от высоты полета носителя РЛС и цели (рис. 2.9). При высотах Нс > 9 км
волна проходит весь основной слой атмосферы четыре раза: два раза при облу­
чении цели и два раза при обратном распространении волны.
Наибольшее затухание в атмосфере определяется двумя причинами: нали­
чием водяных паров и наличием дождя. При отсутствии дождя затухание в
стандартной атмосфере зависит от длины волны и для рассматриваемого слу­
чая (рис. 2.8) величины затухания составляют:
Длина волны, см
3
10
70
Затухание, дБ
5
3
1,5
Рис. 2.9
Дождь вносит значительно большее затухание. На рис. 2.10 представлены
графики зависимости затухания в дожде различной интенсивности и разной
длине волны при однократном распространении. Интенсивность дождя харак­
теризуется толщиной слоя осадков, выпадающих за один час: Qfl мм/ч.
Рис. 2.10
Высота дождя пдж обычно не превышает 2,5.. .3,5 км. При сплошном дожде
на всем пути распространения волны (рис. 2.8) общий путь с учетом того, что
дальность радиогоризонта равна ПОдУн^ , составляет
Максимальное затухание (потери энергии волны а д ж ) в этом случае
где γ, дБ/км - коэффициент затухания.
Для случая Нс = 9 км и пдж = 3 км, Ддж = 520 км максимальные затухания
волны при дожде для различных длин волн составляют (затуханием в дожде в
Р-диапазоне (λ=70 см) можно пренебречь):
С)дж, мм/ч
Затухание, λ=3 см, дБ
Затухание, λ=10 см, дБ
Затухание, λ=30 см, дБ
2
5
0,5
-
5
50
2
-
10
100
3
0,2
Более сложные погодные условия, например тропический дождь
№дЖ - 40 мм/ч), имеют небольшую протяженность и незначительно влияют
на затухание волны в S-, Р-диапазонах. Также мало влияют туман и дым
(γ = 10 дБ/км, протяженность менее 50 км).
В задаче наблюдения наземных малоразмерных целей, находящихся в
сплошном лесу либо за лесопосадками вдоль дорог, решающую роль играет
поглощение волны в кронах деревьев. Степень поглощения зависит от многих
факторов: структуры леса, типа деревьев, влажности, длины волны БРЛС и
длины пути волны в кронах деревьев.
Усредненные по многим данным коэффициенты поглощения γ, дБ/и,
сплошного лесного массива для различных поляризаций (ГП и ВП) приведены
ниже (при одностороннем распространении):
λ, см
у,дБ/м(ГП)
у,дБ/м(ВП)
3
1,2
1,2
10
0,5
0,5
30
0,2
0,22
70
0,12
0,17
300
0,05
0,1
Придорожные посадки деревьев имеют в основном разреженный характер:
в одну - две линии. Поглощение электромагнитных волн в таких посадках за­
висит от типа деревьев, кустарников и густоты посадки. Далее приведены оце­
ночные значения поглощения ЭМВ при двухстороннем распространении
(ап, дБ) для двух типов посадок:
1) для редких деревьев и кустарников;
2) для линии крупных деревьев
λ, см
а п ,дБ(тип 1)
ап, дБ (тип 2)
3
0,8
2,0
10
0,6
1,3
30
0,4
0,9
70
0,3
0,8
300
0,05
0,1
Потери ап в сплошном лесу определяются высотой крон деревьев, высотой
объекта наблюдения и углом падения ЭМВ. Высота крон в смешанном лесу
hKp = 3... 5 м, и с учетом высоты объекта типа «танк» действующая высота
пд = 2...4м.
Путь ЭМВ в кронах деревьев сплошного леса
В зоне нахождения объектов лес имеет небольшие поляны и просеки для
расположения и прохода объектов. В этом случае действующий путь в кронах
можно считать равным Дд = 0,5 Дкр, а затухание ЭМВ - <хп = уДд.
В Х-диапазоне потери достигают 25...30 дБ (в сплошном лесу). В деци­
метровом диапазоне (λ = 70 см) поглощение ЭМВ в кронах деревьев уменьша­
ется в 10 раз.
Потери ЭМВ в придорожных лесопосадках невелики - 0,8.. .2,0 дБ.
При распространении ЭМВ в атмосфере с изменяющимся коэффициен­
том преломления возникают ошибки определения дальности и угла места.
В стандартной атмосфере коэффициент преломления изменяется от высоты
по экспоненциальному закону. Ошибки по дальности в этом случае достига­
ют 50 м, а отклонение луча в угломестной плоскости - 0,5...1,0°. При из-
вестных метеоусловиях возможен учет этого отклонения при измерении угла
места и цели.
Изменение коэффициента преломления с высотой может быть неравно­
мерным: слоями с различным знаком производной законов изменения. Это мо­
жет вызвать отклонение соседних лучей в различные стороны (вверх и вниз),
образуя мертвые зоны обзора по углу места шириной до 15° [14]. Однако веро­
ятность таких специфических изменений коэффициента преломления обычно
невелика.
Случайные изменения фазы ЭМВ при распространении в атмосфере обу­
словлены случайным пространственным изменением показателя преломления.
Изменением показателя преломления во времени можно пренебречь, так как
время корреляции флуктуации составляет 20... 100 с.
Влияние пространственных изменений показателя преломления обуслов­
лено перемещением носителя РЛС по траектории на расстояние X за время ко­
герентной обработки сигнала.
Разность фаз сигнала ψ на интервале X является гауссовой случайной ве­
личиной, дисперсия которой
структурная постоянная атмосферы.
На расстоянии X = 150 м СКО фазы может быть равно (эксперимент): в Xдиапазоне - 10° и в L-диапазоне - 1,0°.
В дециметровом и метровом диапазонах поглощение в кронах деревьев
мало, но случайно расположенные деревья вносят случайный набег фазы ЭМВ.
Корреляционная функция фазы в зависимости от разности углов наблюдения
цели β = X/R при перемещении БРЛС по траектории [13]
Дисперсия фазы ϋψ равна 0,026 рад2 (зимой) и 0,057 рад2 (летом). Интервал
корреляции определяется величинами ψ! =4,910
(летом); ψ2 = 2,610
рад (зимой) и 2,810
рад (зимой) и 5,1-10
рад
рад (летом) при λ = 70 см.
2.5. Передающее устройство
Главная задача передающего устройства заключается в обеспечении тре­
буемой средней мощности излучения зондирующего сигнала в когерентноимпульсном режиме.
В импульсном режиме средняя мощность излучения Рср в Q раз меньше
импульсной мощности:
где
- скважность, равная отношению периода повторения Тп к дли-
тельности импульса ти.
В режиме наблюдения низколетящих целей используются достаточно вы­
сокие частоты повторения: 20...25 кГц и при длительности ти = 1,0 мкс скваж­
ность Q = 40...50. В режиме наблюдения загоризонтных и морских целей ис­
пользуют низкую частоту повторения F = 200...300 Гц, вследствие чего при
той же длительности импульса значительно увеличивается скважность:
Q=5-10 , а средняя мощность резко падает. Для поддержания требуемой сред­
ней мощности увеличивают длительность импульса до 30... 100 мкс, а для
обеспечения разрешения по дальности применяют внутриимпульсную модуля­
цию и сжатие импульса в 100... 150 раз.
Для обеспечения большой дальности действия в передатчике используют
усилительные приборы максимальной выходной мощности. Электровакуумные
приборы (клистроны) имеют наибольшую мощность в S-, Р-диапазонах (до
1,0 МВт). В современных БРЛС они используются в качестве выходного уси­
лителя при импульсной мощности 0,5.. .1,0 МВт и средней мощности 15 кВт.
Для получения мегаваттной импульсной мощности требуется высоко­
вольтное питание клистрона с высокой степенью стабилизации и фильтрации
(90 кВ при флуктуациях менее 1%).
Твердотельные (транзисторные) усилители в S-, Р-диапазонах имеют
среднюю и импульсную мощность не более 100...200 Вт на один транзистор и
используются в перспективных комплексах с АФАР. При числе модулей АФАР
100...500 и использовании длинных импульсов со сжатием средняя излучаемая
мощность может достигать 10...50 кВт при низкой импульсной мощности и
низковольтном питании. Однако необходимо учитывать, что транзисторные
усилители более чувствительны к электромагнитному излучению и высоким
температурам, что требует мощной системы охлаждения.
Вследствие ограничений по температурному режиму передатчика (мощ­
ности системы охлаждения) и ограниченной мощности источников питания,
энергия генерируемого импульса Eu = Puxu имеет свой предел. При превышении
этого предела импульсная мощность излучения падает. Также существует ог­
раничение на минимальную скважность генерируемого сигнала.
Важнейшая характеристика передатчика (с учетом возможности формиро­
вания зондирующего сигнала синтезатором) — ширина полосы частот и время
перестройки несущей частоты при переключении литеров. Чем шире полоса
частот, тем выше помехозащищенность БРЛС. Рабочая полоса частот БРЛС
(диапазон перестройки литеров) определяется условиями электромагнитной
совместимости при одновременной работе многих радиоизлучающих систем в
конкретном диапазоне частот. Так в Х-диапазоне это сотни мегагерц и даже ги­
гагерцы, а в Р-диапазоне - только десятки мегагерц.
Переключение несущей частоты (перестройка литеров) обычно занимает
большое время (миллисекунды), и в перспективных системах решается задача
уменьшения этого времени до единиц микросекунд, что обеспечивает возмож­
ность многочастотного режима излучения БРЛС.
Каждый элемент передающего устройства вносит потери мощности излуче­
ния. Такими элементами являются: соединительные волноводы, вращающийся
переход, фазовращатели, циркулятор, система защиты приемника, фильтры. Об­
щие потери мощности излучения в БРЛС с механическим сканированием антен­
ны достигают 6 дБ. В БРЛС с АФАР большая часть этих элементов и, соответст­
венно, потерь отсутствует (потери 0,5 дБ).
Характеристики БРЛС, прежде всего по наблюдению низколетящих целей,
определяются стабильностью несущей частоты и «чистотой» спектра излучае­
мого сигнала. Медленные, по сравнению с интервалом когерентной обработки
сигнала, изменения частоты, обусловленные температурными уходами, старе­
нием элементов и медленными флуктуациями питающих напряжений, незначи­
тельно влияют на характеристики БРЛС.
Основное влияние оказывают быстрые случайные изменения частоты и,
соответственно, фазы за время когерентной обработки сигнала как при сжатии»
по задержке, так и при доплеровской фильтрации. Разность Δφ фаз на краях
интервала обработки Тс, обусловленную незначительным изменением несущей
частоты, можно считать нормальным случайным процессом с корреляционной
функцией Кф(Тс). Дисперсия разности фаз равна
где σφ - дисперсия фазы несущей частоты.
На рис. 2.11 представлена типовая зависимость (S-диапазон) удельной (на
один герц) дисперсии частоты
от расстояния fM , усредненная по харак­
теристикам различных генераторов опорной частоты.
Изменение фазы определяется расстройкой частоты и временем τΜ = — :
ί
Соответственно, дисперсия фазы
•
Рис. 2.11
Чем ниже частоты фазовых флуктуации, тем больше R9(TC) и меньше
вклад низкочастотных флуктуации в дисперсию флуктуации фазы несущей
частоты. Однако спектральная плотность фазовых шумов возрастает с
уменьшением частоты, что требует учета всех составляющих спектра фазо­
вых шумов φ.
Наибольшее влияние фазовые шумы оказывают на интегральный уровень
боковых лепестков Ринт как сигнала цели, так и мощного сигнала фона, прини­
маемого по основному лучу ДНА. Мощность боковых лепестков (при малых
σΔφ)
где Ринт оценивается в децибелах, а σΔφ - в радианах.
Так, при СКО разности фаз, равном 6°(0,1 рад), мощность боковых лепестков
Ринт = -20 дБ, что приводит к повышению уровня фона основного лепестка ДН
в зоне приема сигналов.
2.6. Антенная система
Основные требования, предъявляемые к антенной системе АК РЛДН:
максимально возможная площадь апертуры антенны Sa;
максимальный коэффициент усиления антенны G;
минимальная ширина ДН по азимуту;
сверхнизкий уровень боковых лепестков ДН как максимального, так и ин­
тегрального;
обеспечение сканирования ДН при круговом и программируемом обзорах;
возможность формирования одновременно нескольких лучей ДН;
широкая полоса частот, как мгновенная, так и при перестройке литеров;
возможность функционирования с учетом размещения антенны на самоле­
те (отражения от элементов конструкции, экранирование излучения, изгибные
колебания фюзеляжа и крыльев, вибрации и перегрузки, температурные изме­
нения, высота полета);
масса антенны.
В современных комплексах РЛДН (например, АВАКС) используются ан­
тенные системы типа плоской волноводно-щелевой решетки, обладающей
большим коэффициентом использования площади (КИП = 0,7.. .0,8).
Решетка размером 7,5x1,5 м размещена в обтекателе 10x2 м, расположен­
ном на пилонах высотой 3,5 м над фюзеляжем самолета. Такая конструкция
обеспечивает максимальный размер апертуры антенны при выполнении боль­
шинства требований.
Больший размер апертуры может быть достигнут при конформной конст­
рукции, например у вдольфюзеляжной антенны, размер которой может дости­
гать нескольких десятков метров по длине и порядка 3...5 м по высоте.
Эффективный размер апертуры определяет коэффициент усиления антен­
ны и ширину ДНА. Коэффициент усиления при заданном размере антенны за­
висит от длины волны, величины потерь энергии в обтекателе и самой антенне,
функции распределения поля по апертуре антенны и ошибок распределения
поля, прежде всего фазовых.
Без учета потерь коэффициент усиления
Потери (S-диа-
пазон) в обтекателе (0,8...1,5 дБ) и в волноводах (1,2 дБ) обычно включают в
коэффициент KG уменьшения G 0 . Функция распределения поля (аподизация) имеет различный вид. Так, часто используемая функция Хэмминга
(косинус на пьедестале) уменьшает коэффициент
усиления по сравнению с равномерным распределением поля
Фазовые ошибки поля вызывают уменьшение коэффициента усиления на
0,2...0,7 дБ:
где σφ - СКО фазовых шумов.
При заданном размере апертуры чем короче длина волны, тем выше коэф­
фициент усиления. Его максимальное значение ограничено возможностью
обеспечения высокой точности амплитудно-фазового распределения поля по
апертуре в условиях размещения антенны на самолете. Максимальное значение
размера апертуры (в длинах волн) большой бортовой антенны обычно не пре­
вышает 100... 150, поэтому антенна АКРЛДН в S-диапазоне имеет коэффици­
ент усиления не более 33...38 дБ.
Антенны типа фазированной антенной решетки имеют меньшие потери в
соединительных волноводах и обтекателе. Однако дискретное управление фа­
зовращателем вызывает шумы квантования, которые составляют 0,1... 1,0 дБ.
Ширина ДН по азимуту определяет минимальную радиальную скорость
обнаруживаемой на фоне отражений от земной поверхности ВЦ, а также раз­
решающую способность и точность определения угловой координаты азимута.
По углу места ширина ДН определяет зону одновременного обзора по дально­
сти. Для расширения зоны используют либо сканирование ДН по углу места,
либо многолучевую ДН.
Ширина ДН по азимуту
где da - размер апертуры антенны в горизонтальной плоскости; ΚΘ - коэффици­
ент расширения ДНА по сравнению с идеальной равномерной апертурой.
Использование весовой функции типа Хэмминга при формировании ам­
плитудного распределения поля по раскрыву антенны приводит к увеличению
ширины ДНА на уровне 0,5 по мощности от максимума на величину ΚΘ=1,5.
В S-диапазоне ширина ДН Θφ =0,9°... 1,0°. По углу места ширина ДН в
S-диапазоне - 5 . . . 6 ° .
При использовании ФАР отклонение луча на угол Θ относительно норма­
ли к плоскости апертуры вызывает расширение луча и уменьшение коэффици­
ента усиления:
. Поэтому иногда в грибовидном об­
текателе размещают три (или более) плоских ФАР в виде равностороннего тре­
угольника, тем не менее в направлении расположения углов треугольной
антенны происходят увеличение Θ0 и снижение G0 в два раза.
Важнейшей задачей при выборе антенной системы является возмож­
ность обеспечения сверхнизкого уровня боковых лепестков (УБЛ) ДН по ази­
муту. Эффективность обнаружения низколетящих целей в значительной мере
определяется УБЛ антенны. При большом УБЛ мощный сигнал фона, прини­
маемый по основному лепестку ДНА, формирует в зоне боковых лепестков
помеховый сигнал фона, не позволяющий обнаруживать сигнал цели.
Для обеспечения сверхнизкого УБЛ (как максимального, так и интеграль­
ного) необходимо использовать специальное амплитудное распределение поля
по раскрыву антенны. Так, при весовой функции типа Хэмминга максимальный
УБЛ равен -42,8 дБ, а интегральный —37 дБ.
Фазовые шумы обычно формируют боковые лепестки в широкой области
углов азимута, а их интегральный уровень
где σφ - СКО фазовых
шумов. Амплитудные шумы действуют так же, как и фазовые, при этом
σφ = 3° эквивалентно действию амплитудных шумов с σΑ = 5 % .
Существующие антенные системы АК РЛДН позволяют обеспечить сред­
ний УБЛ —40 дБ, первый максимальный —30 дБ и задний —55 дБ.
Антенная система должна обеспечивать равномерный круговой обзор про­
странства и программируемый обзор заданных секторов с требуемым временем
обзора. Комплексы РЛДН и АВАКС используют антенны с механическим ска­
нированием ДН путем вращения плоскости антенны совместно с обтекателем
на 360° за 10 с с постоянной скоростью. При ширине ДН по углу места порядка
5° обзор по дальности и высоте целей ведется путем электронного сканирова­
ния в секторе +5...15° с большой скоростью до 100 Гц. Возможен также одно­
временный обзор заданного сектора по углу места путем использования многолучевой ДНА либо антенны со специальной ДН, например cosec φΗ.
Программируемый обзор по азимуту возможен при использовании антен­
ны типа ФАР, где управление ДН осуществляется электронным способом с
большой скоростью переключения (перемещения) луча.
Для обеспечения повышенной помехозащищенности (скрытности) антен­
на должна работать в широкой полосе частот. Мгновенная полоса необходима
для излучения и приема широкополосных сигналов и получения высокой раз­
решающей способности по дальности.
В зависимости от решаемой тактической задачи требуемая полоса состав­
ляет 10... 100 МГц.
Большой разнос по частоте литеров для обеспечения отстройки от помехового сигнала и ЭМС работы БРЛС в группе требует общей рабочей полосы час­
тот БРЛС порядка 300...500 МГц. Однако в низкочастотных S-, Р-диапазонах
обеспечение такой полосы перестройки представляет значительные сложности.
Антенны типа ФАР (АФАР) позволяют формировать провалы ДН в на­
правлении источников помех, что значительно повышает помехозащищенность
АК РЛДН.
Для бланкирования мощных помеховых сигналов, приходящих по боко­
вым лепесткам ДН антенны, используют дополнительную антенну с широкой
ДН, перекрывающей зону боковых лепестков основной антенны (0 = 5.. .6°) и с
небольшим коэффициентом усиления (G = 20.. .30).
Обеспечение заданных характеристик антенны с учетом ее размещения на
самолете требует принятия ряда специальных мер.
Размещение антенны на высоком пилоне (h n = 3,5 м) снижает влияние
конструкции самолета на ДН антенны и уменьшает ближнюю «мертвую» зону
по дальности обзора, обусловленную экранированием излучения крыльями и
фюзеляжем самолета. Тем не менее, хвостовое оперение самолета экранирует
заднюю зону обзора в пределах ±40.. .20°.
Широкофюзеляжный самолет и дополнительные конструктивные элемен­
ты экранируют излучение антенны и прием мощных помех от подстилающей
поверхности, находящейся непосредственно под самолетом (альтиметровые
помехи).
Для уменьшения влияния неоднородностей структуры обтекателя на ха­
рактеристики антенны при круговом обзоре обтекатель вращается вместе с ан­
тенной.
При массе антенны с обтекателем ~2 т, комплекса БРЛС ~4 τ и РТК в це­
лом 20 τ необходимо использовать для размещения комплекса самолеты тяже­
лого класса Ил-76, Боинг 707-320 В. При использовании антенн типа АФАР
масса БРЛС значительно снижается (менее 1,0 т) и РТК размещается на само­
лете среднего класса (Боинг 737-700).
2.7. Приемное устройство
Бортовая радиолокационная система АК РЛДН является многорежимной
системой, выполняющей большое число разнородных функций при использо­
вании различных режимов работы.
Основными режимами БРЛС являются:
когерентно-импульсный режим высокой (средней) частоты повторения,
обычно с простым импульсным сигналом длительностью 0,5...1,5 мкс, для на­
блюдения низколетящих воздушных целей на фоне земной поверхности;
импульсный режим с низкой частотой повторения с большой длительно­
стью импульса 50...100 мкс со сжатием до 1,0 мкс для обнаружения загоризонтных воздушных целей при отсутствии отражений от земной поверхности;
импульсный режим с низкой частотой повторения с длительностью им­
пульса до 25...35 мкс со сжатием до 0,15...0,2 мкс для наблюдения надводных
целей;
в перспективе когерентно-импульсный режим с низкой частотой повторе­
ния в режиме синтезирования апертуры со сжатием импульса до 10 не для ве­
дения разведки малоразмерных наземных целей.
Кроме того, существуют режимы радиотехнической разведки.
Каждый из режимов требует приемного устройства, оптимизированного
для обеспечения той или иной функции БРЛС. В то же время возможна одно­
временная работа БРЛС в нескольких (двух) режимах. Поэтому обычно для
каждого режима используют отдельный приемник и даже несколько приемни­
ков с учетом необходимости обеспечения моноимпульсного режима работы
антенны и помехозащищенности. Общее число приемников достигает 5... 10.
При этом часть приемного устройства является общей для всех приемников от­
дельных режимов.
90
Основные требования к приемному устройству БРЛС:
обеспечение минимального уровня внутренних шумов БРЛС, который оп­
ределяет потенциальные возможности работы во всех режимах;
высокий динамический диапазон (линейность) усилительного тракта при­
емника (80 дБ и более), определяющий потенциальные возможности обнару­
жения низко летящих, малозаметных целей;
возможность селекции (стробирования) импульсных сигналов целей в за­
данном диапазоне задержек (дальностей);
возможность спектральной селекции (фильтрации на промежуточной час­
тоте) импульсных сигналов целей;
возможность сжатия импульсов цели на промежуточной частоте;
возможность доплеровской фильтрации пачки когерентных импульсных
сигналов цели;
возможность режекции когерентной пачки импульсных сигналов фона;
регулировка усиления сигналов (АРУ, ВАРУ);
обеспечение стабильности фазовых характеристик тракта приемника;
ограничение мощных входных помеховых сигналов для предотвращения
перегрузки последующих цепей приемника;
обеспечение преобразования аналоговых сигналов с выхода фазового
детектора в цифровую форму (АЦП) с высоким динамическим диапазоном
(до 80 дБ).
На рис. 2.12 представлена типовая структура приемного устройства БРЛС.
Рис. 2.12
В режиме работы антенны БРЛС на прием фазовращатели обеспечивают
управление ДН по углу места.
С выхода фазовращателей высокочастотные колебания поступают в сис­
тему защиты приемника от мощных импульсных сигналов излучения своего
передатчика, излучения РЛС соседних самолетов и станций активных помех.
Для эффективного подавления высокочастотных импульсов и снижения чувст­
вительности при сильных сигналах используется до пяти ступеней защиты и
регулировки (циркулятор, переключатель на pin-диодах, газоразрядные пере­
ключатели, аттенюаторы и др.). Следующий за системой защиты фильтр (преселектор) пропускает только сигналы БРЛС в рабочем диапазоне частот.
Авиационные комплексы радиолокационного дозора и наведения
Малошумящий усилитель (МШУ) усиливает все сигналы БРЛС в рабочей поло­
се частот. Основное назначение МШУ - обеспечить минимальный уровень спек­
тральной плотности внутренних шумов приемника с учетом шумов входных уст­
ройств (фазовращатели, зашита, аттенюатор, соединительные волноводы, фильтр).
Коэффициент усиления МШУ должен формировать такой уровень сигнала
и шума, при котором последующие цепи приемника не увеличивают коэффи­
циент шума.
В табл. 2.9 представлены типовые значения коэффициента шума Кш и динами­
ческий диапазон (ДД) различных МШУ. Следует отметить большой ожидаемый
прогресс в разработке транзисторных усилителей с большим ДД и малым Кш.
В БРЛС с механическим сканированием антенны МШУ находится непо­
средственно у антенны, а сигнал с МШУ поступает на распределительное уст­
ройство по различным приемникам через вращающийся переход.
Таблица 2.9
Параметры
Кш
ДД,дБ
Балансный
смеситель
9
70
Устройства
Усилитель
Параметрический
наЛБВ
усилитель
5
4
50
40
Транзисторный
усилитель
3
50
Высокочастотные сигналы на несущей частоте преобразуются на проме­
жуточную частоту (преобразователь частоты) и усиливаются при помощи
УПЧ. Обычно используется двойное преобразование частоты.
На второй промежуточной частоте фазовый детектор (ФД) формирует
квадратурные sin- и cos-видеосигналы.
Недостатком такого фазового детектора является необходимость тщатель­
ного подбора и калибровки отдельных sin- и cos-каналов для обеспечения вы­
сокого динамического диапазона выходных сигналов перед АЦП.
При наличии быстродействующих переключателей фазовый детектор
формирует sin- и cos-составляющие сигнала путем выборки обсчетов из про­
межуточной частоты со сдвигом на одну четверть периода (Δφ = π/2). Такой
фазовый детектор обеспечивает высокий динамический диапазон сигналов и не
требует подбора элементов и калибровки. Он может использоваться также и в
других режимах работы БРЛС при низкой промежуточной частоте.
Частотная характеристика фильтра УПЧ обеспечивает оптимальную час­
тотную селекцию по ширине спектра импульсного сигнала. В режимах НЧП
используют импульсные сигналы с внутриимпульсной модуляцией (обычно
линейной частотной). Для сжатия импульсов применяют аналоговое устройст­
во - ультразвуковую линию задержки на промежуточной частоте.
Также возможно выполнение операции сжатия импульсов процессором в
цифровом виде после АЦП.
Для режекции узкополосных помех реализуются соответствующие прова­
лы в частотной характеристике УПЧ. Для режекции помеховых сигналов фона,
принимаемых по основному лепестку ДНА, используют гребенчатый фильтр
пачки когерентных сигналов на основе кварцевых резонаторов с высокой кру­
тизной и большой степенью подавления 30.. .40 дБ.
Дополнительное подавление фона (до 70 дБ в полосе 2 кГц) выполняется
цифровой системой обработки. Разработка процессоров и АЦП с большой раз­
рядностью (15 бит) позволяет весь процесс подавления фона выполнять в циф­
ровом виде.
Основным требованием к амплитудной характеристике УПЧ является вы­
сокая линейность при высоком динамическом диапазоне, особенно в режиме
ВЧП. Обычным требованием к УПЧ является наличие ДД в 80 дБ.
В режиме НЧП без когерентной обработки пачки импульсов для снижения
ДД часто используют УПЧ с логарифмической амплитудной характеристикой.
Стробирование отдельных импульсных сигналов по задержке и доплеровская фильтрация пачки когерентных сигналов по частоте обычно выполняются
после АЦП процессором обработки сигналов.
Изменение усиления приемника (АРУ) для сохранения постоянства отно­
шения сигнал/шум (динамического диапазона) осуществляется аттенюатором
скачкообразно на входе МШУ обычно через 10 дБ. В режиме НЧП аттенюатор
управляет коэффициентом усиления с вариациями изменением задержки цели
(ВАРУ) при изменении дальности.
Второй аттенюатор в УПЧ скачкообразно изменяет усиление на 1 дБ с це­
лью поддержания постоянства уровня шума перед АЦП для обеспечения мак­
симального динамического диапазона цифровых сигналов. Обычно уровень
шума квантуется на 1-2 бита.
Важным требованием к приемному устройству является стабильность ам­
плитудно-фазовой характеристики при изменении коэффициента усиления,
уровня сигнала и помехи, напряжения питания, температуры, вибраций и др.
Обычное требование к СКО фазы - единицы градусов.
На выходе приемника АЦП преобразует аналоговые сигналы (sin- и cosсоставляющие отдельно) в цифровую форму. Параметры цифровых сигналов
должны быть согласованы с процессором сигналов.
Минимальная величина быстродействия АЦП определяется полосой частот
сигнала Afc и обычно равна 1,5...5,0 Afc. Так, при полосе сигнала Afc= 1 МГц
минимальное быстродействие АЦП £Ацп = 1,5 МГц. При использовании цифро­
вого фазового детектора f^n = 4 fnp., где fnp - промежуточная частота.
Разрядность АЦП определяется динамическим диапазоном входного сиг­
нала, который равен отношению мощности фона, принимаемого по основному
лепестку ДН, к мощности шума приемника (80 дБ). Один разряд (бит) АЦП
равен 6 дБ. При выборе порогового сигнала шума, равного одному разряду, и
одного разряда на знак цифрового сигнала ДД равен 6(ТЧ-2)дБ, где N - число
разрядов АЦП.
Так, при N = 15 динамический диапазон составляет 78 дБ.
Если в УПЧ используется гребенчатый фильтр для подавления сигнала
фона входной динамический диапазон уменьшается и требования к разрядно­
сти АЦП снижаются до уровня 11-12 бит.
Потери энергии сигнала в приемном устройстве определяются волноводными соединениями, системой защиты и регулировки усиления (0,8 дБ), стробированием импульсного сигнала по задержке (0,2 дБ); фазовым детектором
(0,7 дБ), фильтром сжатия импульса (0,7 дБ); цифровым процессором (ЦП)
(0,6 дБ) - итого потери энергии сигнала составляют 3 дБ (цифры, близкие к
максимальным значениям).
2.8. Алгоритмы обработки сигналов
2.8.1. Обнаружение низколетящих целей
Наиболее сложной задачей, решаемой БРЛС, является наблюдение мало­
заметных низколетящих целей на фоне отражений от земной поверхности. Так,
в одном разрешаемом элементе дальности 100... 150м при ширине ДНА 1° и
дальности наблюдения цели 300 км мощность фона будет превышать мощность
сигнала цели (а ц < 1 м ) на 30...40 дБ в зависимости от типа местности. Для
обеспечения обнаружения цели, необходимое отношение сигнал/фон равно
10... 13 дБ, что требует подавления фона при обработке сигнала на 40.. .50 дБ.
Так как сигналы фона и цели различаются радиальной скоростью движе­
ния относительно БРЛС, такая задача решается путем использования когерент­
но-импульсного режима с высокой частотой повторения импульсов и доплеровской фильтрацией пачки когерентных отраженных от фона и цели сигналов.
Отраженные сигналы в когерентно-импульсном режиме БРЛС имеют пе­
риодическую структуру как по дальности, так и по доплеровской частоте.
Сигналы по дальности (задержке) повторяются с периодом
и
при частоте повторений Fn = 25 кГц, Дп = 6 км. При дальности 300 км число
элементов разрешения фона по задержке, которые будут суммироваться с фо­
ном в элементе разрешения цели Mr = 50, что еще больше увеличивает мощ­
ность фона по сравнению с мощностью сигнала цели.
Структура спектра отраженных сигналов имеет сложный характер, ме­
няющийся в зависимости от положения ДН антенны при сканировании и пара­
метров движения цели относительно РЛС и земной поверхности.
На рис. 2.13 показана центральная часть (три периода повторения) спек­
тра. Период повторения спектра равен частоте повторения импульсов F n .
Рис. 2.13
Число составляющих доплеровского спектра определяется шириной спек­
тра зондирующего сигнала
. При
МГц и Fn = 25 кГц
получаем Mf =40. Максимальная ширина спектра фона определяется скоро­
стью V c носителя Р
Л
С
Н
а несущей частоте
в*
f0 и частотах fo ±Fn наблюдается увеличение мощности спектра фона («альти­
метр»), обусловленное отражениями от земной поверхности, находящейся не­
посредственно под носителем РЛС и при вертикальном зондировании имею­
щей максимальную удельную ЭПР, При расположении антенны БРЛС на пи­
лонах над фюзеляжем самолета уровень мощности альтиметрового фона
уменьшается вследствие экранирования излучения и приема ЭМВ конструкци­
ей самолета. Однако полностью подавить альтиметровый фон таким путем не
удается. При отсутствии вертикальной составляющей скорости носителя мак­
симум спектра фона имеет нулевой доплеровский сдвиг частоты.
На доплеровской частоте f$ расположен спектр сигнала фона, принимае­
мого по основному лучу ДНА. При горизонтальном полете частота ίφ опреде­
ляется углом сканирования ДН антенны θ относительно вектора путевой ско­
рости:
Уровень мощности спектра фона на других частотах определяется в ос­
новном уровнем боковых лепестков ДН антенны.
Форма спектра и его мощность практически не зависят от дальности на­
блюдения цели, так как он является спектром суммы Мг разрешаемых элемен­
тов фона обзора.
Доплеровская частота сигнала цели определяется относительной скоро­
стью сближения (удаления) Усбл цели и РЛС:
где Vr - радиальная составляющая скорости носителя БРЛС в направлении це­
ли; Ущ - радиальная составляющая скорости цели в направлении РЛС.
Так как цель находится в основном лепестке ДНА, радиальная скорость
РЛС относительно цели известна. При горизонтальном полете и большой даль­
ности цели
где θ - азимутальный угол ДНА относительно векто­
ра путевой скорости. При неизвестном угле сноса радиальную скорость носи­
теля можно определить непосредственно измеряя доплеровскую частоту фона,
принимаемого основным лепестком ДН антенны:
. Этот метод
используют для смещения частоты спектра при любом положении ДН в про­
цессе сканирования по азимуту.
На рис. 2.14 показано изменение положения всего спектра помех по часто­
те при сканировании ДНА по азимуту и смещении спектра фона основного лу­
ча ДНА на нулевую частоту. Сигналы сближающихся с БРЛС целей в передней
зоне обзора (Θ = ±30°) наблюдаются в свободной от помех зоне 1. В свободной
задней зоне обзора 2 (Θ = 180°±30°) будут находиться сигналы удаляющихся
целей. При боковом обзоре (Θ = 90°±30°) все малоскоростные цели будут на­
ходиться в зоне помех, а скоростные цели - в свободной зоне 3.
Рис. 2.14
Оптимальная обработка сигналов, наблюдаемых на фоне помех с нерав­
номерной спектральной плотностью, обычно выполняется в два этапа. На пер­
вом этапе режектируются выбросы спектра помех (альтиметровый фон и фон,
принимаемый по главному лепестку ДНА). В результате спектральная плот­
ность помехи в области доплеровского спектра сигнала становится равномер­
ной, т. е. белым шумом («выбеливание» помехи). Второй этап сводится к со­
гласованной обработке сигналов цели, прошедших «выбеливающий» фильтр.
Согласованная обработка сигналов выполняется раздельно для импульс­
ного сигнала внутри периода повторения импульсов и для когерентной пачки
импульсных сигналов (межпериодная обработка).
Согласованная обработка сигналов по задержке (внутрипериодная обра­
ботка) осуществляется фильтром УПЧ, форма частотной характеристики кото­
рого согласована со спектром импульсного сигнала точечной цели.
Согласованная обработка пачки импульсов в каждом элементе разрешения
по задержке (стробе дальности) сводится к обычной узкополосной доплеровской фильтрации (когерентному накоплению) гармонического сигнала цели и
выполняется цифровым процессором при помощи алгоритма быстрого преоб­
разования Фурье (БПФ).
Сигналы каждого канала по задержке и частоте поступают на порог обнару­
жения, определяемый уровнем фона и помехи в каждом доплеровском фильтре.
Алгоритм обнаружения сигналов низколетящих воздушных целей на фоне
отражений от подстилающей поверхности представлен на рис. 2.15.
Рис. 2.15
Для устранения перегрузки приемника в момент излучения передатчика в
системе защиты приемника проводится бланкирование импульсов передатчика
на время 3—4 мкс. Кроме того, система защиты бланкирует импульсные помехи
от внешних источников излучения.
В момент прихода мощного отраженного сигнала от местности непосред­
ственно под носителем БРЛС (альтиметровый сигнал) приемник запирается на
время прихода отраженных сигналов в полосе дальности (400...500) м. Иногда
путем выбора частоты повторения зондирующих сигналов и высоты полета но­
сителя БРЛС совмещают времена бланкирования импульсов передатчика и
альтиметра, что уменьшает «мертвую» зону приема сигналов.
Согласованная обработка импульсных сигналов цели проводится путем
выбора частотной характеристики УПЧ. Для уменьшения вероятности появле­
ния дополнительных (ложных) отметок цели в соседних элементах разрешения
по дальности (задержке) амплитудно-частотная характеристика УПЧ взвеши­
вается специальной функцией (например, Хэмминга) для уменьшения уровня
боковых лепестков выходного сигнала точечной цели.
В пределах периода повторения сигналов на входе УПЧ проводится стробирование сигналов по задержке. Длительность каждого строба Δτ определяет­
ся разрешающей способностью БРЛС по задержке δτ (дальности). Для умень­
шения потерь энергии сигнала при стробировании вследствие несовпадения
максимума сигнала цели с центром строба увеличивают число стробов (выбо­
рок) на элемент разрешения: Ъх = (1,0...2,0)Δτ. При частоте повторения
Fn = 25 кГц и разрешении по задержке 5t = 1 мкс число каналов по дальности
(число обрабатываемых выборок сигналов)
Чем
больше число каналов, тем меньше потери сигнала, но тем сложнее система
обработки. Импульсные сигналы с каждого строба дальности поступают в свой
канал межпериодной обработки (доплеровской фильтрации пачки импульсных
сигналов).
Так как доплеровский спектр сигналов цели и помех имеет периодический
характер (см. рис. 2.13) для уменьшения динамического диапазона на 20...30 дБ
используют только центральную часть спектра, выделяемую при помощи од­
нополосного (обычно кварцевого) фильтра. Иногда для снижения динамиче­
ского диапазона доплеровский спектр разделяется двумя фильтрами на две час­
ти (левую и правую) относительно несущей (промежуточной) частоты с после­
дующей раздельной обработкой каждой части спектра.
Сигналы альтиметра и малоскоростных целей, в том числе наземных, а
также проникающие сигналы излучения передатчика имеют нулевые доплеровские частоты. Режекторный фильтр подавляет сигналы нулевых частот в
полосе 1,5...2,0 кГц.
Алгоритмы оценки частоты сигнала фона, принимаемого по основному
лепестку ДНА, а также алгоритмы смещения спектра всех сигналов на величи­
ну этой частоты, обеспечивают возможность:
эффективной режекции (подавления) помех, принимаемых по основному
лучу ДН антенны низкочастотным фильтром, на 40.. .50 дБ;
получения максимальной зоны по частоте (скорости сближения целей),
свободной от помех в передней зоне обзора (см. рис. 2.14);
получения максимальной зоны по частоте (скорости удаления целей), сво­
бодной от помех в задней зоне обзора.
В случае необходимости обнаружения с одинаковой эффективностью всех
целей (сближающихся и удаляющихся) в круговой зоне обзора после подавления
фона основного луча ДН антенны спектр всех сигналов смещается в первона­
чальное состояние, когда центральная частота спектра фона равна нулю.
Несмотря на режекцию выбросов спектра фона на нулевой частоте (альтометр) и частоте фона главного луча ДН антенны, спектральная плотность
фона, принимаемого по боковым лепесткам ДН антенны, значительно пре­
вышает спектральную плотность помех в зоне, свободной от фона. Для вы­
равнивания уровней сигналов фона и помех перед узкополосной доплеровской фильтрацией используют две раздельные системы АРУ - по фону и по
помехам.
Узкополосная доплеровская фильтрация сигналов в каждом стробе даль­
ности обеспечивает согласованную обработку сигналов как в зоне спектра фо­
на, так и в свободной зоне (зоне помех).
Пороги обнаружения выставляются для обеспечения заданного уровня ве­
роятности ложных тревог. Номер строба дальности и номер фильтра доплеровской частоты (скорости), в которых сигнал превысил порог, являются исход­
ными данными для оценки координат целей и завязки траекторий целей.
Следует отметить, что операции режекции фона и узкополосной фильтра­
ции могут быть объединены и выполнены путем отключения фильтров с номе­
рами, соответствующими зоне режекции.
При достаточно большой радиальной скорости низколетящей воздушной
цели спектр сигнала цели находится вне спектра фона. Вероятность обнаруже­
ния такой цели определяется отношением сигнал/помеха, где помеха формиру­
ется в основном внутренним шумом приемника и активными источниками по­
мех. Помехи фона в этой области спектра обусловлены флуктуациями частоты
зондирующего сигнала, которые формируют боковые лепестки спектра сигнала
фона. Обычно для уменьшения уровня фона используется весовая обработка
пачки импульсных сигналов, обеспечивающая подавление фона до уровня ни­
же собственных шумов приемника.
Отношение сигнал/шум в элементе разрешения по задержке и частоте оп­
ределяется выражением
где Рср - средняя мощность излучения БРЛС; Тс - время когерентного накопле­
ния пачки импульсов (доплеровская фильтрация); G - коэффициент усиления
антенны, одинаковый на передачу и прием; λ - длина волны БРЛС; Νπ - спек­
тральная плотность мощности помех; ап - суммарный коэффициент потерь
энергии сигнала; Д - дальность цели.
Средняя мощность существующих БРЛС АКРЛДН порядка 10...15 кВт.
Время накопления обычно 2.. .3 мс.
Время облучения цели
где Θ0 - ширина ДН по азимуту (1°), Qc - угловая скорость вращения антенны
(360° за 10 с), Тобл^ЗО мс. Через каждые 10 мс изменяется частота повторения.
За время 10 мс проводятся четыре обработки на одной частоте повторения и
обнаружение ведется по алгоритму «три из четырех».
Коэффициент усиления антенны при ширине ДН Θ 0 =1°Η Φ0=5° порядка
7. ..810 3 . ЭПР цели (истребитель) - 3.. .5 м2.
Спектральная плотность шумов определяется коэффициентом шума МШУ
и устройств защиты приемника: Кш=4.. .6 дБ и N0 = kTFm = 4-10 -¥ш [Вт/Гц]. В
случае активной шумовой помехи Nn = NG + ΝΑπ, где ΝΑπ - спектральная плот­
ность активной помехи.
Суммарные потери (средние оценочные значения [8]) состоят из следую­
щих составляющих:
в обтекателе
в волноводах передатчика
в волноводах приемника
за счет ДНА при обработке
при стробировании по задержке
при режектировании фона
за счет рассогласования характеристики УПЧ
при стробировании по частоте и весовой обработке
при пороговой обработке
потерь в дожде
(0,8... 1,2) дБ;
(1,0... 1,2) дБ;
(1,2... 1,6) дБ;
(1,3... 1,5) дБ;
(0,2.. .0,3) дБ;
(0,5.. .0,9) дБ;
(0,2.. .0,3) дБ;
(1,5...1,9) дБ;
(0,5.. .0,7) дБ;
6 дБ
Суммарные потери (без дождя) - 8... 14 дБ.
Требуемое отношение сигнал/помеха при Ρ^= 10-6 в случае медленно флук­
туирующей пачки импульсов для получения вероятности обнаружения Рпо = 0,7
равно 10 дБ, а для вероятности 0,9 необходимо иметь 15 дБ (рис. 2.16, а).
Плотность распределения ЭПР цели экспоненциальная.
а) Медленные флуктуации
б) Быстрые флуктуации
Рис. 2.16
При быстрых флуктуациях от пачки к пачке требуемое отношение сиг­
нал/шум при Рп0 = 0,9 равно 11 дБ (рис. 2.16, б).
Обычно задается отношение сигнал/шум, равное 13 дБ, что обеспечивает
за три обзора Рпо = 0,95 при Рлт = 10~6.
Определение вероятности обнаружения низколетящей цели при наблюде­
нии сигнала цели на фоне отражений от подстилающей поверхности требует
вычисления уровня мощности фона в элементе разрешения цели по дальности
и скорости с учетом мощности помехи. Мощность сигнала цели определяется
теми же параметрами БРЛС, как и в случае обнаружения сигнала без фона.
Мощность фона зависит от многих параметров РЛС и подстилающей поверх­
ности.
На рис. 2.17 показан случай формирования сигнала фона в режиме ВЧП,
когда обеспечивается однозначное соответствие скорости цели и доплеровской
частоты при неоднозначности по дальности.
В элемент разрешения сигнала цели по задержке и частоте попадают сиг­
налы, отраженные от подстилающей поверхности в элементах разрешения на
местности по горизонтальной дальности 5Д и азимуту δ 1:
где φ - угол места элемента разрешения относительно вектора путевой скоро­
сти носителя, 5г - разрешение по наклонной дальности;
определяется разрешением по частоте
при азимутальном угле наблю­
дения фона 9ф относительно вектора путевой скорости носителя.
Соответственно, мощность сигнала фона одного элемента разрешения оп­
ределяется величиной ЭПР фона
.Величина удельной ЭПР σ0
зависит от типа местности и угла места φ. Для БРЛС комплексов Е-2 и Е-3 на
основании экспериментальных и расчетных данных сформированы модели
удельных ЭПР фона σ 0 (φ) (см. рис. 2.7, 2.8).
Элементы разрешения фона лежат на пересечении линии равной допле­
ровской частоты (изодопы) с линиями равных дальностей, следующих с перио­
дом
(6 км при Fn = 25 кГц). Число элементов дальности находится
значением
, где Д т а х определяется дальностью радиогоризонта.
На рис. 2.17 область пересечения показана отдельно (в кружочке).
Доплеровская частота изодопы соответствует частоте цели
где У - радиальная составляющая скорости цели в направлении БРЛС, θ угол сканирования ДН антенны по азимуту в направлении на цель на большой
дальности (фц « 0).
Рис. 2.17
Доплеровская частота цели определяет доплеровскую частоту фона L· = f4 и,
соответственно, угол θφ относительно вектора путевой скорости
,
необходимый для расчета разрешения по азимуту.
Мощность фона в элементе разрешения цели определяется суммой мощ­
ностей фона каждого разрешаемого по дальности элемента фона
По сравнению с мощностью сигнала цели при расчете отношения сиг­
нал/фон мощность фона определяется не только ЭПР фона σ^, но и другим
коэффициентом усиления антенны
ι, который зависит от координат
элемента фона. Кроме того, потери при обработке сигналов фона меньше на
3...5дБ по сравнению с обработкой сигнала цели. Это объясняется малым
влиянием рассогласования характеристик системы обработки и сигналов фона,
так как при рассогласовании происходит перераспределение сигнала фона ме­
жду элементами разрешения, не изменяя его мощности.
При учете приема фона по боковым лепесткам выходного сигнала согла­
сованной системы обработки (функции неопределенности) задача расчета
мощности фона еще более усложняется. Поэтому такие расчеты обычно прово­
дят методом математического имитационного моделирования с учетом стати­
стики сигналов и фона.
В результате пороговой обработки сигналов формируются данные целей
для последующей (вторичной) обработки:
номер канала задержки (неоднозначной дальности);
номер канала частоты (скорости);
азимут (среднее значение угла из четырех обнаруженных пачек);
угол места (сканированием ДН либо моноимпульсным методом).
2.8.2. Оценка характеристик обнаружения низколетящих
воздушных целей Б РЛС с квазинепрерывным излучением
Получение оценок характеристик бортовой РЛС с трассовым выходом изза большой размерности задачи требует разработки калибруемых по экспери­
ментальным данным математических моделей с имитацией процессов зондиро­
вания пространства, обнаружения отметок на различных частотах повторения
от ВЦ в доплеровско-дальностных каналах, устранения неоднозначности по
дальности, реализации первичной и вторичной обработок добываемой инфор­
мации. Для повышения точности оценок характеристик обнаружения необхо­
димо одновременно учесть законы флуктуации эффективной поверхности рас­
сеяния ВЦ, наличие альтиметровых помех в бортовой РЛС, нестационарность в
пространстве и во времени потока ложных отметок, обусловленных как пере­
отражениями от подстилающей поверхности, так и наличием в каналах обра­
ботки ложных отметок комбинационного характера при неверном устранении
неоднозначности по дальности.
Далее приводится методика определения характеристик обнаружения
низколетящих воздушных целей методом имитационного моделирования.
Используются обозначения, как в оригинале [3].
Бортовая РЛС с переключением частот повторения импульсов (ЧПИ) из­
лучает когерентную последовательность зондирующих радиоимпульсов,
спектр которых представлен на рис. 2.18, а, длительностью ти и ЧПИ Fnl,Fn2 и
т. д. Авиационный носитель перемещается равномерно и прямолинейно на вы­
соте Н с со скоростью Vc (рис. 2.18, б). Принятые колебания состоят из полез­
ного сигнала, активных и пассивных помеховых колебаний, отраженных под­
стилающей поверхностью (рис. 2.18, в). Мощность помех на входе бортовой
РЛС зависит от среды распространения радиоволн, диаграмм направленности
приемной и передающей антенн, свойства подстилающей поверхности и
других факторов. Необходимо получить последовательность и расчетные вы­
ражения оценок характеристик данного класса РЛС в условиях реального
функционирования.
Обобщенный алгоритм оценки характеристик обнаружения ВЦ приведен
на рис. 2.19. В этом случае с учетом движения авиационного носителя опреде­
ляется уровень отраженных подстилающей поверхностью сигналов в каждом
доплеровском канале, рассчитываются отношения сигнал/помеха и вероятно­
сти обнаружения ВЦ.
Применяются две основные системы координат: сферическая (в,<р,Д),
центром которой является фазовый центр антенны, и декартовая система
(Χ,Υ,Η) с центром в точке пересечения перпендикуляра, опущенного из цен­
тра, с поверхностью земли (см. рис. 2.18, б).
Рис. 2.18
Рис. 2.19
Направление оси OY совпадает с направлением вектора скорости авиаци­
онного носителя. Для упрощения решения задачи предполагается, что можно
пренебречь кривизной земной поверхности и влиянием среды распространения
радиоволн.
Нормированные диаграммы направленности приемной и передающей ан­
тенн задаются функциями gnp(e,(p) и gnep(s,(p), так что
(2.1)
где S2 - сфера с единичным радиусом; ds2 - элемент площади сферы; G np , Gnep коэффициенты усиления антенн.
Свойства обратного рассеяния различных подстилающих поверхностей,
характеризующиеся удельной поверхностью обратного рассеяния β(ε), пока­
зывают, какая часть мощности отражается малым участком подстилающей по­
верхности в обратном направлении под углом к горизонтальной плоскости.
В общем случае значение G(e) зависит от угла падения, длины волны, вида
подстилающей поверхности, вида поляризации падающей и рассеянной волн.
Для основных видов подстилающей поверхности (лес, пашня, поле, вода и др.)
Θ(ε) определяется экспериментально.
Пусть S(f) - спектр излученного сигнала. Рассмотрим составляющую
спектра на частоте f'. Мощность сигнала на входе БРЛС, отраженная элемен­
тарной площадкой с центром в точке (х, у), определяется в соответствии с
уравнением радиолокации
где Ри - импульсная мощность.
Мощность принятого колебания в интервале частот [f, f + δί] определяется
путем замены координат (х, у) на (Д,1*д) и интегрирования по f (рис. 2.18, б);
1д = f - f' - доплеровская частота; f - частота, на которой принимается
помеховое колебание;
,
- спектр принятого колебания.
Если спектр сигнала дискретный, то интегрирование по f' заменяется сум­
мированием. Чтобы определить спектр сигнала, отраженного кольцом дальности
шириной АД и внутренним радиусом Д, необходимо проинтегрировать N(fl, f)
по переменной Д:
(2.2)
Если
лежит в интервале Гд,Д + ДЦ], подынтегральное вы­
ражение не определено. В этом случае необходимо сделать замену переменной
интегрирования
после чего (2.2) принимает вид
Тогда распределение мощности помех по частоте и каналам дальности оп­
ределяется как
где К - число интервалов неодно­
значности дальности в пределах горизонта; Д^ - КД0 + тАД - внутренний ра­
диус кольца дальности т-го канала на К-м интервале неоднозначности.
Спектральная плотность мощности шумов генератора передатчика бор­
товой РЛС, переотраженная подстилающей поверхностью, N mr (f) =
где Νπ - спектральная плотность мощности шумов пе­
редатчика, Ν ππ - спектральная плотность мощности отражений от подстилаю­
щей поверхности.
В итоге вычисление спектра помех, отраженных подстилающей поверхно­
стью, осуществляется численными методами.
Пусть, например, заданы следующие параметры:
Необходимо вычислить значение спектра помеховых колебаний
N(f, m) на частоте f в канале дальности с номером т. Предварительно опре­
деляется интервал однозначного измерения дальности
где с скорость света,
дальность горизонта,
- разрешающая способность по дальности, Дг - максимально возможная доплеровская
частота,
- максимальная частота в пределах дальности
горизонта, К^ и К2 - номера минимальной и максимальной спектральных со­
ставляющих, вносящих вклад в формирование значения N(f,m) имеют вид
- число интервалов однозначности по дальности в пределах горизонта.
Затем проверяется, попадает ли точка Дг в m-й канал дальности: если
, то значение N2 уменьшается на единицу. Для каждого
к€{к15...к2} вычисляется вклад k-й составляющей спектра
N(f,m):
а к в значение
где 0к - угол, определяющий гиперболу, соответствующую доплеровской час­
тоте
- минимальное
расстояние от носителя бортовой РЛС до гиперболы доплеровской частоты
fk(cM. рис. 2.18). При этом нижний предел интегрирования по дальности в по­
следнем интервале однозначности вычисляется как
, причем
если Дп < Д т , то полагается отсутствие помехи и переходим к следующему
значению к. Если 0 к н е удовлетворяет условию
то находится
расстояние до той точки гиперболы f = fK, в которой касательная к ней образу­
ет угол π/4 с осью оу:
Замечание. На отрезке [Д м , Дп ] интегрирование осуществляется по пере­
менной
а на отрезке
- по Д.
Если
то значение Ν3 уменьшается на единицу. Впо­
следствии определяется номер интервала дальности, в который попадает точка
Если
, то необходимо увеличить зна­
чение на единицу.
Вычисление уровня помехи в к-м доплеровском канале дк осуществляется
по следующей формуле:
где
Тогда значение спектра помехи от подстилающей поверхности для борто­
вой РЛС, использующей квазинепрерывный режим, определяется как
Оценка эффективности управления порогом обнаружения в бортовой РЛС
с учетом сформированной области селекции приоритетной воздушной цели
(Os) на этапе вторичной обработки и разрешающих способностях
ι
станции осуществляется путем определения конечного множества элементов
разрешения (Ω η ) на каждой частоте повторения с изменяемым порогом обна­
ружения
где Νη - общее число элементов разрешения с изменяемым порогом обнаруже­
ния; ФгД - оператор отображения, определяющий преобразование неоднознач­
но измеряемых координат на различных частотах повторения в сферические
координаты
- номера каналов обнаружения многока­
нального приемника по отдельным координатам, в которых осуществляется
изменение порога.
В дальнейшем для определяемого допустимого уровня снижения ложных
тревог (F^ on) ) проводится оценка реализуемых показателей обнаружения в
рассматриваемых секторах сопровождения. Для повышения точности оценки
вероятности обнаружения ВЦ используется модель флуктуации ЭПР, подчи­
ненная логарифмическому закону распределения, аппроксимируемая следую­
щим выражением:
где
Для малоразмерных ВЦ функция распределения ЭПР имеет вид
В зависимости от ракурса ВЦ определяются вид и параметры функции распре­
деления, конкретные значения которых многократно разыгрываются на имита­
ционной модели. По значению дальности до ВЦ рассчитывается требуемое для
обнаружения значение ЭПР.
Вероятность обнаружения
Возможен упрощенный вариант расчета вероятности обнаружения ВЦ,
при котором флуктуации ЭПР не учитываются. Тогда для квазинепрерывного
режима излучения бортовой РЛС обнаружение должно осуществляться на двух
частотах повторения. При этом рассчитывается реализуемое отношение сиг­
нал/помеха в приемном каннеле:
где
- коэффициент, учитывающий мощность
и длину волны передатчика, потери в тракте на излучение и прием, уровень
шумов приемника, длину пачки зондирующего сигнала, абсолютные значения
коэффициентов усиления антенны, размерности всех входящих в формулу величин; η - коэффициент затенения ДНА корпусом авиационного носителя.
С учетом принятого варианта зондирования и обработки РЛИ наиболее
целесообразно использовать модель дружнофлуктуирующей отраженной пачки
со случайной амплитудой и фазой.
Для отношения сигнал/помеха (Sp) можно записать выражение
где Рап - отношение мощности активных помех при обнаружении к собствен­
ным шумам приемника; Р шп - отношение мощности шумов генератора и не­
сущей частоты, переотраженных подстилающей поверхностью в зоне действия
комплекса, к мощности собственных шумов приемника; Р пп - отношение
средней мощности отражений от подстилающей поверхности (в канале дально­
сти) к мощности собственных шумов приемника (для конкретного типа под­
стилающей поверхности).
Предполагая, что за время облучения ВЦ ее ЭПР остается неизменной, по­
лучим вероятность ее обнаружения на одной (Pi), двух (Рг) и трех (Р3) частотах
повторения:
где P(SP) - вероятность обнаружения нефлуктуирующей ВЦ на одной частоте
повторения
Ιο - функция Бесселя 1-го рода нулевого порядка.
Величина порога П0 обнаружения задается вероятностью Рлт ложной тре­
воги как
Особенностью учета влияния на характеристики обнаружения активношумовых помех (АШП), воздействующих на бортовую РЛС с квазинепрерыв­
ным излучением сигналов, является необходимость последовательной оценки
уровня помех в каждом дальностно-доплеровском канале. При этом в отличие
от моделирования импульсных РЛС оценивается не только маскирующий эф­
фект со снижением дальности обнаружения ВЦ, но и определяются уровни по­
мех в каналах, превысивших порог обнаружения, которые используются для
имитации дополнительных ложных отметок, выдаваемых на подсистему вто­
ричной обработки РЛИ.
2.8.3. Обнаружение загоризонтных воздушных целей
В этом режиме при обнаружении сигналов ВЦ отсутствуют помеховые
сигналы, обусловленные отражениями от подстилающей поверхности. Поэтому
нет необходимости селекции сигналов цели на фоне отраженных сигналов по­
верхности при помощи доплеровской фильтрации.
В структуре БРЛС используются общие для всех режимов устройства: ан­
тенна, фазовращатели, система защиты приемника и малошумящий усилитель.
Затем общие сигналы разделяются и для режима наблюдения загоризонтных
ВЦ используется отдельный приемник с оптимизированными для данного ре­
жима характеристиками. Такое конструктивное решение, кроме того, позволяет
вести одновременный обзор пространства в двух режимах.
Дальность обзора загоризонтных ВЦ простирается от границы радиогори­
зонта до максимальной дальности прямого наблюдения - 400.. .700 км.
Для однозначного измерения дальности используется режим НЧП. Так,
при Fn = 200 Гц однозначное соответствие задержки сигнала и дальности
обеспечивается до дальности R = 750 км. При этом не требуется излучение
сигналов на различных частотах повторения, что уменьшает потери энергии
сигнала.
Уменьшение энергии сигнала, обусловленное более низкой частотой по­
вторения (примерно в 100 раз), компенсируется увеличением длительности
сигнала до 30... 100 мкс, а для сохранения разрешающей способности по даль­
ности применяется внутриимпульсная модуляция (линейная частотная) с ко­
эффициентом сжатия 100... 150.
Число накапливаемых импульсов за время облучения
невелико
(5-6). Для упрощения системы обработки и исключения потерь энергии при
спектральной доплеровской фильтрации используется некогерентное накопле­
ние импульсов за время облучения. Потери по сравнению с когерентным нако­
плением невелики (1 дБ).
Для увеличения вероятности обнаружения и повышения помехозащищенно­
сти возможно изменение несущей частоты зондирующего сигнала от импульса к
импульсу для раскорреляции амплитуды отраженного от цели сигнала (пачка быстрофлуктуирующих импульсов). По той же вероятности правильного обнаруже­
ния требуемое отношение сигнал/шум уменьшается на 3.. .4 дБ (см. рис. 2.16).
На рис. 2.20 представлена структура алгоритма обнаружения загоризонтных воздушных целей.
Рис. 2.20
На входе УПЧ проводится стробирование зоны обзора по дальности (за­
держке). Частотная характеристика УПЧ (фазовая и амплитудная) обеспечива­
ет селекцию спектра импульсного сигнала цели. На выходе УПЧ при помощи
ультразвуковой линии задержки проводится сжатие импульса с внутриимпульсной частотной модуляцией и амплитудное детектирование выходных
сигналов.
Во всей зоне обзора по дальности выходные сигналы амплитудного детек­
тора стробируются по задержке. Обычно число стробов (отсчетов) на элемент
разрешения по дальности выбирается с учетом допустимого уровня потерь
энергии сигнала и последующей сложности системы обработки (1,0-2,0). В ка­
ждом отдельном стробе проводится некогерентное накопление (суммирование)
пачки принимаемых за время облучения цели импульсов.
Сигнал на выходе каждого строба после суммирования сравнивается с
порогом обнаружения, определяемым уровнем помехового сигнала и задан­
ной вероятностью ложной тревоги. Обычно порог на 6...8 дБ больше СКО
помехи.
Параметры обнаруженных сигналов: номер строба задержки (дальность)
(на рис. показаны четыре строба) и положение луча ДНА в момент обнаруже­
ния (азимут и угол места) в цифровом виде поступают в процессор сопровож­
дения цели. Скорость цели определяется по изменению задержки (дальности)
от обзора к обзору.
2.8.4. Обнаружение надводных целей
Сигналы надводных целей обнаруживаются на фоне помех (внутренний
шум, активные помехи) и сигналов, отраженных от морской поверхности.
Уровень сигнала фона морской поверхности определяется площадью раз­
решаемого элемента 58 = бД51 и удельной ЭПР морской поверхности σ0
(см. рис. 2.6, 2.7).
Отношение сигнал/фон можно представить как
, где 5S - разре­
шаемая площадка фона, равная 6ДО 0 Д. Например, при наблюдении катера
«Пегас» ( а ц = 1 8 0 м ) на фоне взволнованной морской поверхности (5...6
баллов) на дальности Д = 300 км удельная ЭПР моря σ0 =10 -4 . Разрешаемая
площадка 6S при
ЭПР фона
ли типа «катер».
равна 1,510 м .
, что обеспечивает обнаружение це­
2.8.5. Особенности алгоритмов обнаружения воздушных целей БРЛС,
работающей в Р-диапазоне
Отличительной особенностью БРЛС комплексов РЛДН корабельного ба­
зирования (например, AN/APS-145 комплекса Е-2С Хокай) является использо­
вание Р-диапазона излучения (430...450 МГц). В этом диапазоне (λ = 70 см) в
семь раз уменьшается диапазон доплеровских частот, что позволяет использо­
вать НЧП режим для обнаружения как надводных, так и воздушных целей.
При частоте повторения Fn = 300 Гц обеспечивается однозначное измере­
ние ДаЛЬНОСТИ - ДМакс = 500 КМ.
Неоднозначность по скорости цели
составляет 100 м/с
(360 км/ч) и устраняется в процессе изменения дальности от одного обзора к
другому (Т0бз = Юс).
Время облучения цели определяется шириной ДН антенны (6...7°) и со­
ставляет 170...190 мс. При обнаружении ВЦ время облучения разбивается на
3—4 этапа по Тс = 50 мс, на каждом из которых проводится доплеровская
фильтрация сигналов цели (БПФ).
Разрешающая способность по частоте
и по скорости
, что позволяет измерять радиальную скорость цели с точно­
стью 1...2 м/с. Сигналы в каждом элементе разрешения по частоте, полученные
на трех этапах когерентной обработки, суммируются (некогерентно) и посту­
пают на пороговое устройство обнаружения цели.
Благодаря однозначности по дальности мощные сигналы ближней зоны
(альтиметр, импульсы передатчика) бланкируются по задержке и не влияют на
обнаружение сигналов целей, расположенных вне зоны бланкирования.
Основное влияние на обнаружение ВЦ оказывает фон - отраженные от
морской поверхности сигналы, принимаемые по основному и боковым лепе­
сткам ДН антенны. Хотя удельная ЭПР взволнованной морской поверхности
в Р-диапазоне на 5... 10 дБ меньше по сравнению с ЭПР в S-диапазоне, ши­
рина ДНА и, соответственно, разрешаемая площадка фона в семь раз больше,
что определяет примерно одинаковый уровень фона в одном элементе раз­
решения.
Для подавления фона в основном лепестке ДНА используется трехимпульсный режектор фона, а по боковым лепесткам - режим селекции движу­
щихся целей (СДЦ) с использованием моноимпульсной антенны [13]. В этом
режиме формируется провал ДНА в направлении разрешаемого элемента фона,
имеющего ту же доплеровскую частоту, что и сигнал цели.
2.8.6, Зоны обзора и режимы работы БРЛС
Круговая зона обзора БРЛС может разбиваться на 16-32 секторов, в каж­
дом из которых может быть задан любой режим работы. Кроме простых режи­
мов, предназначенных для наблюдения за определенным классом целей, воз­
можны комбинированные режимы, получаемые в результате сочетания про­
стых режимов. Частота смены простых режимов в процессе обзора в любом из
комбинированных режимов выбирается из условия обеспечения непрерывно­
сти сканирования пространства в пределах заданного сектора.
В качестве примера возможных простых и комбинированных режимов
АК РЛДН далее представлены варианты их сочетания при решении задач на­
блюдения воздушных, надводных и радиоизлучающих целей.
1. Комбинированный импульсно-доплеровский ВЧП режим с быстрым
сканированием ДНА по углу места и режим НЧП.
В данном режиме обеспечивается обнаружение воздушных целей на фоне
земной поверхности, а также загоризонтных воздушных целей и надводных це­
лей на предельных дальностях. Он является универсальным и используется
наиболее часто. Однако по дальности обнаружения он уступает другим про­
стым и комбинированным режимам без сканирования по углу места.
2. Импульсно-доплеровский режим с большой длительностью излучаемых
импульсов. В этом режиме автоматическое сканирование ДН по углу места не
осуществляется, а ее положение в вертикальной плоскости устанавливается
оператором вручную в пределах максимального сектора сканирования. Данный
режим позволяет обнаруживать воздушные цели, определять дальность до них
и радиальную скорость (высота не определяется). Применение больших перио­
дов накопления при доплеровской обработке сигнала увеличивает вероятность
и дальность обнаружения малоразмерных целей.
3. Загоризонтный режим с НЧП с ручной установкой луча ДН антенны в
положение угла места 1...2°. Режим обеспечивает обнаружение воздушных це­
лей на предельных дальностях.
4. Режим НЧП наблюдения только за надводными целями на предельной
(до радиогоризонта) дальности. Луч ДН антенны устанавливается оператором в
направлении радиогоризонта.
5. Импульсно-доплеровский режим с медленным сканированием по углу
места и загоризонтный режим НЧП. В данном режиме предполагается использо­
вание импульсов большой длительности и увеличенных интервалов накопления
при доплеровской обработке отраженных сигналов. Он обеспечивает наблюдение
за малоразмерными воздушными целями на больших дальностях, но чувстви­
тельность РЛС в загоризонтном режиме несколько ниже, чем во втором режиме.
6. Импульсно-доплеровский режим с медленным сканированием по углу
места и пассивный режим РТР. Станция работает с импульсами большой
длительности при одновременном медленном сканировании по углу места, че­
редуясь с работой РТР.
7. Импульсно-доплеровский режим с быстрым сканированием по углу
места и режим НЧП наблюдения за надводными целями. Дополнительно воз­
можно использование загоризонтного режима. При этом обеспечиваются обна­
ружение воздушных целей на фоне шумов от подстилающей поверхности и
измерение их высоты, а также надводных целей на средних дальностях. Могут
также выделяться цели с малыми скоростями. Недостаток этого режима - огра­
ниченные возможности по подавлению мешающих отражений от подстилаю­
щей поверхности.
8. Импульсно-доплеровский режим с большой длительностью импульсов
и ручной установкой луча ДНА в угломестной плоскости и режим наблюдения
за надводными целями. Он обеспечивает высокую чувствительность при обна­
ружении воздушных целей. Загоризонтные цели не обнаруживаются.
9. Импульсно-доплеровский режим с медленным сканированием по углу
места и режим наблюдения за надводными объектами. Он обеспечивает высо­
кую эффективность при обнаружении малоразмерных воздушных целей. Воз­
можность наблюдения морских целей несколько понижена.
10. Импульсно-доплеровский режим с импульсами малой длительности и
режим наблюдения за надводными целями. Обеспечивает высокую эффектив­
ность обнаружения воздушных и морских целей.
11. Пассивный режим с быстрым сканированием по углу места и загоризонтный режим. Импульсно-доплеровский сигнал не излучается, в то время как
приемная подсистема доплеровской обработки обнаруживает цели, излучаю­
щие сигналы в частотном диапазоне РЛС. Путем быстрого сканирования при­
емной диаграммы направленности по углу места обеспечивается определение
высоты воздушных целей. Данный режим чередуется с загоризонтным, позво­
ляющим обнаруживать цели на большом удалении.
12. Пассивный и загоризонтный режимы. Они обеспечивают наблюдение в
широком диапазоне частот источников радиоизлучения и радиоэлектронной
обстановки на предельных дальностях.
13. Пассивный режим и режим наблюдения надводных целей. Они исполь­
зуются для обнаружения надводных и воздушных источников радиоизлучения,
а также обнаружения надводных целей на больших дальностях.
По команде оператора РЛС одновременно функционируют в двух любых
из рассмотренных выше режимах, при этом каждый из них может назначаться
основным или вспомогательным. Частота повторения вспомогательного ре­
жима может изменяться в некоторых пределах. Например, при выборе значе­
ния частоты повтора, равного пяти, в каждом пятом цикле сканирования бу­
дет использоваться вспомогательный режим, в то время как основной режим
будет использоваться в первых четырех из пяти циклов сканирования. Выбор
режимов работы станции программируется членами экипажа самолета на эта­
пе планирования полетного задания, а также может осуществляться в ходе
полета в зависимости от решаемых задач и условий наблюдения.
Литература
1. Богданов А.В., Филонов А. . Применение узкополосной доплеровской фильтрации в много­
функциональных радиолокационных комплексах. - Тверь: ΒΑ ΒΚΟ, 2006.
2. Бортовые радиолокационные станции военной авиации зарубежных стран (Аналитический
обзор по материалам открытой печати). / Под ред. B.C. Вербы и СВ. Яголъникова. - Тверь :
2 ЦНИИ МО РФ, 2005.
3. Верба B.C. Методический подход к оценке характеристик обнаружения и сопровождения
воздушных целей бортовой Ρ Л С, применяющей квазинепрерывное излучение сигналов. - Ра­
диотехника, 2006, № 1.
4. Верба B.C. Обнаружение наземных объектов. Радиолокационные системы обнаружения и на­
ведения воздушного базирования. - М.: Радиотехника, 2007.
5. Верба B.C. Тенденции развития авиационных и космических средств информационной раз­
ведки и дозора. // Наукоемкие технологии, 2004, №№ 8,9.
6. Верба B.C. Формирование режима обнаружения и распознавания наземных целей в много­
функциональном авиационном комплексе разведки, оповещения и управления. - Радиотех­
ника, 2006, № 1.
7. Верба B.C., Вакуленко А.А., Дод В.Н., Пильщиков Д. Ε. Методика выбора в реальном масштабе
времени эффективного варианта цифровой обработки радиолокационной информации в мно­
гофункциональном радиотехническом комплексе с трассовым выходом. - Радиотехника,
2005, № 5.
8. Верба B.C., Гандурин В.А. Радиолокатор с синтезированной апертурой на высотном беспи­
лотном дирижабле. - Антенны, 2004, №№ 8, 9.
9. Верба B.C., Гандурин В.А., Трофимов А.А. Бортовая РЛС для перспективного многофункцио­
нального авиационного комплекса разведки, оповещения и управления с цифровой АФАР. Наукоемкие технологии, 2004, №№ 8,9.
10. Верба B.C., Мирошниченко А.В., Морозов Ю.А. Выбор варианта бортовой РЛС с АФАР для
многофункционального авиационного комплекса разведки, оповещения и управления. - Ра­
диотехника, 2006, № 1.
11. Кондратенков Г.С, Фролов, А.Ю. Радиовидение. Радиолокационные системы дистанционно­
го зондирования Земли / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005.
12. Кондратенков Г.С, Хотлянник В.А., Иванисов Б.А. Статистические характеристики сигналов
РСА дециметрового диапазона. - Радиотехника, № 3, 2000.
13. Clarke J. Airborne Early Warning Radar. - Proc. JEEE, February, 1985.
14. Мог chin W.C. Airborne Early Warning Radar. - Artech House, 1990.
15. Morchin W.C. Radar engineer's sourcebook. - Artech House, 1993.
16. Stimson G. W. Introduction to Airborne Radar. - SciTech publishing, Inc, 1998.
ГЛАВА 3
СИСТЕМЫ И АЛГОРИТМЫ ОБРАБОТКИ
РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
3.1. Алгоритмы первичных измерений координат целей
Характеристики первичных радиолокационных измерений координат це­
лей во многом определяют основные показатели информативности всего
АК РЛДН. Являясь источником данных для системы сопровождения, они уста­
навливают пределы возможностей обеспечения полноты и достоверности трас­
совой информации. Эта информация используется при решении задач дозора,
раннего предупреждения, управления и других функций комплекса РЛДН. Ал­
горитмы формирования первичных измерений вместе с алгоритмами об­
наружения целей определяют все важнейшие тактико-технические характери­
стики радиотехнического комплекса [5, 7, 8].
Общие положения о структуре алгоритмической обработки следуют из
принципиальных технических решений, положенных в основу создания кон­
кретных РЛС АК РЛДН. В подобных РЛС применяется узкополосный зондирую­
щий сигнал. Поэтому обычно пространственно-временная обработка сигнала
реализуется в два последовательных этапа: пространственная обработка элек­
тромагнитного поля в антенной системе и обработка временного сигнала в при­
емном тракте. При этом на этапе обработки временного сигнала разделяются
процедуры обнаружения и измерения параметров сигнала, которые проводятся в
физически различных вычислительных устройствах. Операции по измерению
параметров сигналов и формированию первичных измерений проводятся в про­
цессоре обработки сигналов, а алгоритмы измерения координат используют дан­
ные сигнального процессора. В многорежимной РЛС АК РЛДН при каждом ре­
жиме работы используется свой комплекс алгоритмов, предназначенный для ре­
шения соответствующих задач с учетом особенностей входной информации.
3.1.1. Характеристики данных сигнального процессора
В режиме излучения с высокой частотой повторения проводится коге­
рентная обработка импульсной последовательности (кадра обработки) с фик­
сированной частотой повторения. Обнаружение сигналов цели проводится в
каждом элементе разрешения по задержке (неоднозначной дальности) и в каж­
дом доплеровском фильтре [4]. Для устранения неоднозначности измерения
дальности применяется смена частот повторения от кадра к кадру. За время ра­
диолокационного контакта обрабатывается несколько кадров с различными
частотами повторения.
Число каналов дальности обычно равно текущей скважности излучения
или превышает ее, так как для уменьшения энергетических потерь темп съема
данных увеличивается по сравнению с длительностью отраженного импульса.
Число доплеровских каналов соответствует числу отсчетов принимаемых сиг­
налов в кадре когерентной обработки.
При непрерывном сканировании по азимуту и углу места результаты об­
работки на каждом кадре соответствуют некоторому среднему положению ан­
тенны за время длительности кадра. При превышении порога обнаруженная
отметка имеет следующие параметры (данные): текущий средний азимут и
угол места кадра, номер канала неоднозначной дальности, номер канала часто­
ты и амплитуду. Если в антенной системе формируются парциальные прием­
ные каналы, то такие данные имеются по каждому каналу. Вследствие взаим­
ного перекрытия характеристик каналов сигнал, отраженный от одиночной то­
чечной цели, может занимать несколько элементов обнаружения по каждой из
четырех координат: азимуту, дальности, частоте и углу места.
При согласованной обработке амплитудное распределение сигналов то­
чечных целей в координатах задержка-частота повторяет функцию неопреде­
ленности зондирующего сигнала, дискретизированную по каналам дальности и
частоты. После обнаружения формируется «срез» функции неопределенности
по пороговому уровню.
Число обнаруживаемых отметок в частотных каналах определяется ам­
плитудой сигнала и формой весовой функции, которая используется в проце­
дуре БПФ для снижения уровня боковых лепестков спектра сигнала. Широко
применяемое окно типа «косинус квадрат» обычно дает не более трех-четырех
обнаружений в смежных каналах.
Протяженность отметок по дальности (число каналов задержки) зави­
сит от соотношения между длительностью импульса и частотой выборки и для
сигналов точечной цели средней мощности составляет два канала. На рис. 3.1
приведен пример распределения отметок при наблюдении групповой цели.
При работе над слабошероховатыми поверхностями (спокойное море,
степь, пустыня) может иметь место двойное распространение отраженной от
цели волны вследствие зеркального переотражения от подстилающей поверх­
ности. Это приводит к формированию и обнаружению переотраженного под­
стилающей поверхностью сигнала - «антипода» цели. Отметки «антипода» не­
значительно отличаются по параметрам от отметок цели. Различие в доплеров­
ских частотах практически отсутствует. Разница дальностей отметок опреде-
Рис. 3.1
ляется по формуле Δτ = 2НЦ Η / Дц , где Нц, Η - высота цели и высота РЛС, Дц дальность до цели.
При наличии отметки антипода возможно измерение высоты цели путем
измерения разницы задержек отметок цели и антипода Δτ:
Такой метод используется в комплексе корабельного базирования Е-2
(Хокай) при обнаружении низколетящих целей на фоне отражений от морской
поверхности. Однако точность измерения высоты цели на больших дальностях
невелика.
При отсутствии отметок антипода измерение высоты цели осуществляется
при помощи ДН антенны в угломестной плоскости. Однако широкая ДН ан­
тенны (5-6°) не обеспечивает высокую точность измерения высоты цели, нахо­
дящейся на больших дальностях.
Кроме сигналов целей могут быть обнаружены сигналы помех от подсти­
лающей поверхности. Помехи, принятые по главному лучу, обычно подавля­
ются на этапе когерентной обработки. Проводится режекция области частот,
занятой этой помехой, и бланкирование обнаружения в соответствующих час­
тотных каналах. Вследствие того, что антенна РЛС, установленная на воздуш­
ном носителе, имеет сравнительно малые размеры по высоте, угломестная диа­
грамма направленности обладает значительным уровнем боковых лепестков во
всей полусфере. Это создает условия для формирования так называемых «вы­
сотных» или альтиметровых отражений от местности, находящейся непосред­
ственно под самолетом-носителем РЛС. Эти сигналы концентрируются в низ­
кочастотной области доплеровского спектра частот, а их протяженность по
дальности определяется шириной диаграммы обратного рассеяния подстилаю­
щей поверхности. Рис. 3.2 поясняет соотношения между параметрами альтиметрового сигнала.
Связь между частотой сигнала и геометрическим положением отражателя
выражается зависимостью
(3.1)
где V - скорость носителя РЛС.
Рис. 3.2
Если ширина индикатрисы рассеяния поверхности составляет Δγ, то мак­
симальное значение дальности Д тах = Η /cos(Ay) и протяженность этих сигна­
лов по дальности
При отражении электромагнитных волн от крупномасштабных пологих
неровностей ширина индикатрисы рассеяния Δγ по порядку величины равна
среднеквадратическому значению углов наклона поверхности. При работе над
пересеченной местностью ее средняя величина по косвенным оценкам состав­
ляет порядка 30°, что соответствует протяженности альтиметровых отражений
по дальности до одного километра и более.
Другой характерной особенностью является их азимутальная протяжен­
ность. Флуктуации интенсивности и, соответственно, распределение отметок в
координатах дальность-частота, обусловлены неодинаковым затенением даль­
них лепестков диаграммы направленности элементами конструкции самолета
при вращении антенны. Особенно этот эффект заметен при эволюциях самоле­
та по крену.
За счет сканирования по азимуту сигналы на последовательных кадрах
подвергаются амплитудной модуляции диаграммой направленности. Поэтому
конфигурация отметок от одной и той же цели на соседних кадрах может быть
различной, даже без учета собственных флуктуации отраженного сигнала.
Наиболее изменчива конфигурация альтиметровых отметок.
При работе РЛС в режиме низкой частоты повторения зондирующих сиг­
налов отметки имеют более простую структуру. Каналы обнаружения дискретизированы по дальности и азимуту. Число каналов дальности может состав­
лять несколько тысяч, и их дискретность соответствует темпу съема данных
после сжатия зондирующих импульсов. В РЛС S-диапазона за время радиоло­
кационного контакта с целью при сканировании антенны по азимуту излучает­
ся не более пяти-семи импульсов (в зависимости от периода повторения). Для
оптимального обнаружения такой пачки отраженных сигналов применяют не­
когерентное накопление импульсов в каждом канале дальности в скользящем
по азимуту окне (нерекурсивная фильтрация) или в рекурсивном фильтре не
выше второго порядка. Решение об обнаружении принимается на каждом пе­
риоде зондирования. В результате азимутальный дискрет отметок соответству­
ет периоду повторения зондирующих импульсов.
В РЛС Р-диапазона пачка может состоять из 32 и более импульсов зонди­
рования, что позволяет реализовать доплеровскую фильтрацию. При этом кад­
ры БПФ могут перекрываться во времени. В этом режиме отметка имеет номер
канала дальности и номер доплеровского канала, а азимутальный дискрет оп­
ределяется степенью перекрытия кадров обработки. Для получения приемле­
мой точности измерения азимута обычно достаточно пяти-семи отметок в пре­
делах пачки.
В режиме работы по воздушным целям, находящимся за дальностью ра­
диогоризонта, полностью отсутствуют отражения от подстилающей поверх­
ности. При работе по надводным объектам возможно обнаружение целеподобных сигналов («долбяков»), отраженных от взволнованной морской по­
верхности.
В РЛС Р-диапазона обычно присутствуют непреднамеренные помехи от
различных наземных узкополосных источников излучения, которые режектируются по частоте.
Несинхронные импульсные помехи устраняются на этапе когерентной об­
работки путем сглаживания резких перепадов уровней сигнала. Такая обработ­
ка может применяться и в РЛС S-диапазона в режиме излучения с высокой час­
тотой повторения. Обнаруженные помеховые отметки могут селектироваться в
режиме СДЦ по их протяженности в частотной и временной областях.
3.1.2. Принципы алгоритмов формирования
первичных радиолокационных измерений
Основной задачей алгоритмов формирования первичных радиолокацион­
ных измерений является получение «на проходе» оценок координат обнару­
женных отметок. Измерение координат осуществляется в несколько этапов в
соответствии с пространственно-временной структурой отраженных сигналов.
В режиме излучения с высокой частотой повторения сначала проводится
внутрикадровая обработка информации, полученной на кадре с одной часто­
той повторения, затем - межкадровая обработка информации, объединяющая
данные с последовательных кадров в пределах некоторого азимутального окна.
Основные задачи внутрикадровой обработки:
распознавание и отсев помеховых отметок;
распознавание образов целей в координатах задержка-частота;
измерение неоднозначной дальности и частоты полученных групп отметок.
На этапе межкадровой обработки основной задачей являются идентифи­
кация и совместная обработка отметок от одной и той же цели, полученных на
различных частотах повторения. В результате совместной обработки вычисля­
ются однозначная дальность, однозначная радиальная скорость, уточняется
азимут цели. В режиме измерения высоты путем сканирования либо моноим­
пульсным методом оценивается угол места цели.
Структурная схема алгоритмов измерений приведена на рис. 3.3.
Рис. 3.3
Обработка в режиме низкой частоты повторения также разделяется на
этапы, если при обработке сигналов проводится доплеровская фильтрация. В
этом случае внутрикадровая обработка по своим задачам и принципам реали­
зации не отличается от обработки в режиме с высокой частотой повторения. В
задачи межкадровой обработки входят уточнение частоты и дальности и изме­
рение азимута по амплитудной информации обнаруженной пачки.
При обнаружении загоризонтных воздушных целей обычно измеряются
только дальность и азимут цели. Эти измерения проводятся по информации,
накопленной в течение азимутальной пачки.
На этапе внутрикадровой обработки в режиме работы с высокой частотой
повторения селекция помеховых отметок проводится по априорной информа­
ции об их характерных признаках, описанных выше. Жесткая связь между час­
тотой и дальностью альтиметровых отражений позволяет распознавать их и
режектировать. Кроме того, возможна селекция «альтиметра» по азимутальной
протяженности.
Необходимо отметить, что наиболее эффективна борьба с такими помеха­
ми на ранних этапах обработки. Так, возможно сформировать отдельный канал
когерентной обработки, работающий со слабонаправленной антенной, луч ко­
торой ориентирован вертикально вниз. Сигналы, обнаруженные в этом и в ос­
новном каналах, идентифицируются как альтиметровые. Также возможна на­
стройка алгоритма обнаружения с учетом нерэлеевского распределения ампли­
туд альтиметровых сигналов.
Задача распознавания образов решается в бортовом процессоре. Обычно
применяется упрощенный алгоритм группирования отметок в двумерной об­
ласти, основанный на критерии связности. Алгоритмы поиска положения мак­
симума (или «центра тяжести») полученной области реализуют работу двумер­
ного дискриминатора.
Простейшим способом решения задач группирования и измерения являет­
ся выбор на кадре единственной отметки с максимальной амплитудой. Более
сложным является способ, при котором границы группы определяются после­
довательно по каждой координате с вычислением средневзвешенного значения
этой координаты. Например, в элементе дальности формируется связная об­
ласть отметок по частоте и определяется среднее значение частоты по этой об­
ласти. Затем процедура повторяется для следующего элемента дальности, и ес­
ли дальности смежные, а их частоты достаточно близки, то отметки объединя­
ются в группу. Накопление проводится до тех пор, пока выполняются эти
условия. Затем замеры частоты усредняются по всей группе и определяется ве­
личина неоднозначной дальности.
Измерение частоты проводится на основе гипотезы наличия в одном эле­
менте дальности единственной цели или неразрешаемой по частоте группы це­
лей. При этом амплитудный профиль отметок должен соответствовать априор­
ной форме спектра цели и для измерения можно применить простые алгоритмы
одномерной интерполяции положения максимума или алгоритмы дискримина­
тора. Отклонение частоты сигнала от некоторого опорного значения вычисля­
ется путем весового суммирования амплитуд с антисимметричными коэффи­
циентами и амплитудной нормировки [12].
Оценка частоты сигнала f, выраженная в номерах гармоник дискретного
преобразования Фурье (ДПФ), вычисляется по формуле
(3.2)
где Ai - амплитуда отметки в группе, состоящей из η отметок; μ^ - весовые ко­
эффициенты, зависящие от числа η анализируемых отметок; fb fn - номера час­
тотных каналов соответственно первой и последней отметок из группы.
В зависимости от выбора коэффициентов по этой формуле определяется
положение или максимума, или медианы, или «центра тяжести» спектра. Прак­
тически одинаковые по точности результаты дают алгоритмы интерполяции
положения максимума и медианы.
Точность измерений при прочих равных условиях зависит от типа приме­
няемого окна в процедуре ДПФ. На рубежах обнаружения окно типа «косинус
квадрат» позволяет достигнуть величины ошибки порядка 1/5 ширины частот­
ного дискрета. Эта ошибка характеризует точность измерения сдвига частоты
сигнала относительно несущей. Если компенсатор доплеровской частоты, обу­
словленной собственной скоростью носителя отсутствует, то измеренная час­
тота соответствует радиальной скорости относительного движения цели и РЛС.
Если компенсация проводится, то измеренная частота соответствует радиаль­
ной скорости цели относительно земли. При этом фактический сдвиг частоты
компенсирует собственное движение с ошибкой из-за навигационных ошибок,
и ошибок системы подстройки частоты. Поэтому точность алгоритма измере­
ния доплеровской частоты определяет точность измерения относительной ра­
диальной скорости цели.
Повышение точности измерения частоты на этапе внутрикадровой обра­
ботки не является самоцелью, а предназначено для повышения достоверности
межкадровой обработки при устранении неоднозначности по дальности. В
процессе сличения отметок, обнаруженных на разных частотах повторения, ос­
новным критерием является инвариантность радиальной скорости. Поэтому
уменьшение ошибок измерения частоты уменьшает ошибки неправильного
сличения и вычисления неоднозначной дальности.
Обычно разрешение целей в пределах компактной области отметок не
проводится, так как для этого требуется высокое отношение сигнал/шум, а до­
зорные РЛС обычно вынуждены работать на максимальных дальностях, когда
отношение сигнал/шум минимально.
Для повышения точности измерения координаты дальности может приме­
няться интерполяция, если амплитудный профиль отметок по дальности извес­
тен (соответствует форме автокорреляционной функции сигнала). В противном
случае могут приниматься различные решения в зависимости от тактической
обстановки и текущей решаемой задачи радиотехнического комплекса. Напри­
мер, в группе может выделяться отметка с минимальной дальностью (головная
цель) или с максимальной амплитудой. При наличии достаточно точного целе­
указания от системы сопровождения выделяется отметка с указанной дально­
стью. При группировании отметок по дальности недопустимо определять сред­
невзвешенную дальность, как это делается при оценке частоты. Это объясняет­
ся тем, что малая ошибка измерения неоднозначной дальности (на 1-2
элемента) приводит к ошибке вычисления однозначной дальности в десятки и
сотни километров.
На этапе межкадровой обработки основной задачей является объединение
результатов внутрикадровой обработки, полученных на соседних кадрах, вы­
числение однозначной дальности и скорости и уточнение азимута цели. Прин­
ципиальное различие между этапами обработки заключается в следующем.
Если при внутрикадровом группировании обычно известен ожидаемый
образ цели в координатах группирования (функция неопределенности сигнала
на одной частоте повторения), то при межкадровом группировании это не име­
ет места. Неизвестны неоднозначная дальность и частота на другой частоте по­
вторения, сигнал искажен флуктуациями и модулирован по амплитуде азиму­
тальной ДН антенны. Кроме того, наличие на одном кадре отметок от несколь­
ких целей или ложных отметок практически не ухудшает достоверность
внутрикадровой информации. В то же время функция неопределенности сигна­
ла на соседних кадрах в этих условиях становится многопиковой и создает не­
однозначность при группировании отметок. Ошибки межкадрового группиро­
вания приводят к значительным ошибкам вычисления однозначной дальности,
что эквивалентно пропуску на трассе истинной отметки и обнаружению лож­
ной отметки на ошибочно вычисленной дальности.
Методы устранения неоднозначности по дальности (УНД) до одиночной
(разрешаемой по другим координатам) цели различаются алгоритмами реше­
ния задачи восстановления числа по его остаткам, к которой сводится эта зада­
ча при детерминистском подходе.
Обозначим через тц истинную (однозначную) задержку сигнала цели, че­
рез Tj - неоднозначную задержку, полученную при работе с периодом повторе­
ния Tj. Тогда для восстановления значения тц, пренебрегая ошибками измере­
ния
имеем систему уравнений
(3.3)
где kj - неизвестные целые числа.
Для удобства анализа выберем новую единицу измерения задержки Δ та­
кую, что все периоды повторения, выраженные в этом масштабе, являются вза­
имно простыми числами. Для этого достаточно выразить значения Tj в виде ра-
циональных дробей, и тогда величина Δ будет равна отношению наибольшего
общего делителя числителей к наименьшему общему кратному знаменателей.
Вычитая попарно уравнения системы (3.3), получаем диофантовы уравнения в
целых числах вида
(3.4)
где
Для существования решения необходимо, чтобы величина ц была кратна
наибольшему общему делителю чисел Tj,Tj. Поскольку они являются взаимно
простыми, то величина ц должна быть округлена до целого числа.
Способ решения таких уравнений был известен Диофанту и Евклиду. По­
сле введения Гауссом понятий вычетов и сравнения по модулю решение запи­
сывается в замкнутом виде:
(3.5)
где
- решение уравнения mf1
(константы,
которые могут быть вычислены заранее).
Нахождение решения системы уравнений (3.4) может быть сведено к по­
иску по таблице, при котором не требуются логические операции и арифмети­
ческие вычисления.
Более строгое решение задачи как статистической оценки неизвестного
параметра основывается на теории многошкальных измерений. Будем для про­
стоты полагать ошибки измерения неоднозначных задержек гауссовыми со
среднеквадратическим значением στ, одинаковым для каждого из периодов по­
вторения Ti? и независимыми для различных периодов повторения. Тогда для
функции правдоподобия L однозначной задержки тц, полученной по результату
измерения τ\, имеем следующее выражение:
(3.6)
Фактический диапазон изменения чисел ki определяется допустимым ин­
тервалом значений ошибки измерения истинной задержки тц. Максимально
правдоподобная оценка задержки т т у по результатам этого измерения является
неоднозначной:
Можно показать, что при объединении независимых измерений на η пе­
риодах повторения максимально правдоподобная оценка задержки τ достигает­
ся при таких значениях k i? которые минимизируют дисперсию неоднозначных
замеров Тщц, усредненную по всем η измерениям:
При малой ошибке измерения
значения к{, максимизирующие
функцию правдоподобия, единственны и, очевидно, совпадают с решением
системы уравнений (3.4). Тогда оценка однозначной задержки тц получается
как среднее арифметическое оценок т т у при к{ = k j .
Таким образом, задача УНД сводится к выявлению тем или иным образом
дальности, на которой происходит максимальное число совпадений неодно­
значных оценок дальностей. Поиск такой однозначной дальности может быть
проведен различными способами: прямым перебором вариантов, табличным
способом, путем решения системы уравнений в целых числах по формуле (3.5)
и другими.
Описанные выше методы измерения дальности основаны на разделении
решения этой задачи на два этапа. Первый этап состоит в нахождении точеч­
ных оценок неоднозначных задержек на каждой из используемых частот по­
вторения, второй этап - в нахождении искомой однозначной дальности по по­
лученным на первом этапе оценкам с учетом априорной информации. Как было
показано выше, каждый из этапов может выполняться с различной степенью
строгости в статистическом описании моделей наблюдаемых и оцениваемых
параметров. Однако, как правило, ограничиваются нормальными законами
распределения, что является адекватным лишь при достаточно больших отно­
шениях сигнал/шум (более 20...25 дБ) и не позволяет учесть (в статистическом
смысле) наличие слепых зон приема, обусловленных запиранием приемника на
время излучения и наличия коррелированных помех от подстилающей поверх­
ности. Кроме того, на первом этапе для нахождения точечных оценок неодно­
значных задержек обычно используют обнаружение сигнала, что сопряжено с
появлением ошибок 1-й 2-го родов. Число и значения используемых частот
повторения являются фиксированными и обычно не зависят от дальности и те­
кущего отношения сигнал/шум, что приводит к низкой вероятности правильно­
го измерения дальности при слабых сигналах и неоправданному затягиванию
процедуры разрешения неоднозначности при сильных сигналах.
Развитие вычислительной техники позволило решить задачу раскрытия
неоднозначности по дальности в БРЛС в общем виде. При этом проводится:
определение оптимальных значений частот повторения, обеспечивающих
максимальный прирост информации в процессе их перебора;
определение необходимого числа частот повторения для обеспечения за­
данной вероятности правильного измерения;
статистическая оптимизация алгоритмов определения неоднозначной за­
держки по дальности;
оптимизация процедуры раскрытия неоднозначности;
оптимизация учета априорных данных о координатах цели и ее парамет­
рах движения (целеуказание по дальности и скорости) [17].
На каждой ЧПИ перед излучением следующей пачки импульсов с другой
ЧПИ проводится определение оптимального значения частоты повторения,
обеспечивающей максимальный прирост информации о дальности до цели.
Тем самым обеспечивается адаптация алгоритма измерения к текущей дально­
сти до цели (выбираются преимущественно «прозрачные» частоты) и к теку­
щему отношению сигнал/шум.
На каждой частоте повторения по имеющимся комплексным амплитудам
принятого сигнала в стробах дальности на выходе спектроанализатора вычис­
ляется функция правдоподобия неоднозначной задержки в пределах периода
повторения с учетом «слепых» зон и уровня мешающих отражений (помех) в
зоне приема. Важно заметить, что при этом нет необходимости в пороговой об­
работке, и соответственно, отсутствуют потери. В свою очередь отсутствие по­
роговой обработки позволяет увеличить число ЧПИ при сохранении общего
измерения, что повышает вероятность правильного измерения дальности.
Оценка дальности проводится по критерию максимума апостериорной
плотности вероятности, для вычисления которой используются априорная
плотность вероятности и информация об изменении дальности до цели в про­
цессе измерения.
Применение указанного метода позволяет получить выигрыш до шести
децибел.
Существенные трудности возникают при обнаружении нескольких нераз­
решаемых по частоте и азимуту целей (тактической группы). В этой ситуации
задача УНД не сводится к известной задаче оценки параметров сигнала при
наличии мешающих сигналов. В нашем случае сигналы являются ортогональ­
ными и обнаруживаются независимо друг от друга. Проблема измерения связа­
на не с деформацией главного максимума выходного эффекта (проблема ло­
кальной точности), а с неоднозначностью измерений (проблема глобальной
точности). Такая задача относится к разряду некорректно поставленных: вопервых, ее решение не единственно, во-вторых, оно неустойчиво. Регуляриза­
ция возможна только при наличии априорной информации, достаточной для
выработки единственного решения.
При отсутствии такой информации вероятности ошибочных решений рас­
считываются при упрощающих предположениях:
для однозначного измерения дальности во всем требуемом диапазоне дос­
таточно двух различных частот повторения;
периоды повторения, выраженные в подходящем временном масштабе, взаимно простые числа;
неоднозначные дальности целей случайны и равномерно распределены в
пределах каждого периода повторения;
вероятность обнаружения каждой цели на каждой частоте повторения
равна единице.
Если обнаруживается m целей на η частотах повторения и
то отно­
шение числа ложных измерений к числу истинных оценивается по формуле
(3.7)
где Q - среднее число элементов разрешения на периоде повторения; ти - про­
тяженность элемента разрешения в масштабе измерения периодов повторения.
Отсюда видно, что при фиксированном числе частот повторения и фикси­
рованной скважности необходимо увеличивать число элементов разрешения.
Увеличение числа η целесообразно в том случае, если это не приводит к сни­
жению вероятности обнаружения на азимутальной пачке.
Для снижения вероятности ошибок в условиях реального радиолокацион­
ного наблюдения (неединичная вероятность обнаружения, неравномерное рас­
пределение целей при полете в боевых порядках и т. д.) необходимо проводить
идентификацию отметок, полученных на смежных кадрах.
Идентификация отметок на пачке кадров основана на построении для ка­
ждой их комбинации функционала качества идентификации. Этот функционал
представляет собой некоторую статистику, распределения которой существен­
но различаются для отметок, порожденных одной и той же целью, и разными
целями. Обычно это сводится к накоплению «невязок» между априорным
(ожидаемым) значением параметра и полученным в данной комбинации отме­
ток. Отбор комбинаций для формирования выходной отметки осуществляется
на основе анализа полученного функционала и может проводиться по различ­
ным критериям. Так, возможны следующие варианты.
1. Выбор единственной комбинации с наилучшим значением функционала
(в частности, с наибольшей амплитудой).
2. Отбор комбинаций со значением функционала не ниже порогового.
3. Отбор лучших комбинаций, число которых равно минимальному числу
обнаруженных отметок из всех кадров. Наиболее просто эта задача решается
для случая двух кадров. Она формализуется как задача о назначениях в дву­
дольном графе и может быть решена, например, «венгерским» методом [18].
При отборе комбинаций необходимо учитывать возможность слияния от­
меток разных целей по неоднозначной дальности. Если такую гипотезу отвер­
гать (считать это событие маловероятным), то при отборе необходимо учиты­
вать, что каждая отметка может войти только в одну комбинацию.
Критерий отбора может изменяться в различных тактических ситуациях.
Критерий № 1 может быть пригоден при слежении за единственной приори­
тетной целью из состава группы, численность которой не определяется. Крите­
рий № 2 обеспечивает гарантированную достоверность информации о выдан­
ных отметках, но часть первичных обнаруженных отметок может быть утеряна.
Он может применяться на этапе раннего радиолокационного обнаружения для
повышения качества захвата и обнаружения трасс без определения численного
состава групп. По критерию № 3 выдается максимальное число отметок, воз­
можно, с повышенным уровнем ложных дальностей. Он целесообразен при на­
личии сопровождаемой трассы для определения численного состава.
В простейшем функционале качества используется закономерность изме­
нения амплитуды отметки при сканировании по азимуту - форма азимутальной
диаграммы. Для его формирования сначала вычисляются азимут предполагае­
мой комбинации отметок по формуле дискриминатора типа (3.2) и оценка ам­
плитуды в центре пачки:
(3.8)
где ain, b i ; n - весовые коэффициенты; Ai - амплитуда отметки на i-м кадре.
Оцениваются амплитуды сигналов на каждом кадре А{, которые должны
иметь отметки с азимутом φ и амплитудой А :
где
- азимутальная диаграмма направленности; Δφ - угловое расстояние
между кадрами.
Функционалом качества F служит нормированная сумма отклонений из­
меренных амплитуд от теоретических
Также возможна селекция целей по амплитуде. Для этого отметки на каж­
дом кадре ранжируются по амплитуде, и идентифицируются отметки с одина­
ковыми рангами.
После идентификации отметок и вычисления однозначной дальности про­
водится устранение неоднозначности по частоте. При работе с высокой часто­
той повторения априорный диапазон скоростей целей всего в два-три раза пре­
вышает интервал неоднозначного измерения на одной частоте повторения. По­
этому для раскрытия неоднозначности измерений достаточно выполнить
прямой перебор двух-трех возможных гипотез. Для повышения точности изме­
рения скорости целесообразно усреднение замеров на отдельных кадрах обра­
ботки. При компенсации собственной скорости носителя измеренная величина
соответствует радиальной скорости цели относительно земли. Если необходи-
мо знание скорости сближения (удаления) цели с РЛС, то из измерения вычи­
тается радиальная составляющая скорости носителя.
Измерение азимута может проводиться различными способами. Простей­
шим из них является определение центра пачки по формуле
(3.9)
где (рнач, φΚΟΗ - азимуты центров кадров начала и конца пачки.
Более точные оценки получаются при весовой обработке амплитуд по
формуле (3.8). Как и в любом дискриминаторе, выбор весовых коэффициентов
позволяет реализовать оценку положения максимума пачки, медианы, центра
тяжести и более высоких моментов распределения амплитуд.
Измерение азимута проводится по информации датчика угла поворота ДН
антенны, который жестко связан с полотном антенны и обычно юстируется по
строительной оси самолета. Ось вращения антенны в общем случае отклонена
от местной вертикали как по конструктивным соображениям, так и из-за нали­
чия крена и тангажа самолета-носителя. Перед выдачей в систему вторичной
обработки координат цели азимут пересчитывается в систему координат, в ко­
торой проводится сопровождение. Это могут быть следующие системы:
прямоугольная система координат, связанная с местным горизонтом и
ориентированная по местному меридиану с центром в точке нахождения РЛС
(местная система координат);
топоцентрическая прямоугольная система координат с центром в заданной
точке на поверхности земли;
геодезическая система координат;
геоцентрическая система координат.
При пересчете в местную систему координат используются данные о те­
кущем курсе, крене и тангаже самолета, а также учитывается ориентация ан­
тенной площадки относительно строительной оси. Для повышения точности
целесообразно учитывать статические и переменные деформации несущих пи­
лонов под действием аэродинамических нагрузок, а также проводить хотя бы
грубую оценку угла места цели.
В режимах работы с низкой частотой повторения дальность измеряется
однозначно. Формирование первичных измерений основано на возможности
оценки времени задержки отраженных сигналов в приемном устройстве. Изме­
рения формируются по информации о номере строба, в котором обнаружена
цель. Группирование отметок в смежных стробах позволяет избежать размно­
жения целей и повышает точность измерения дальности.
Группирование по дальности в пределах азимутальной пачки и измерение
этих координат можно проводить различными способами. В одном случае ази­
мутальная пачка формируется для каждого элемента дальности. Вследствие то­
го, что пачка состоит из малого числа отсчетов, критерии начала и конца обыч­
но очень жесткие: начало - первое обнаружение, конец - первый пропуск.
Алгоритм измерения азимута зависит от алгоритма обнаружения пачки.
Если обнаружение проводится в скользящем окне симметричной формы, то ал­
горитмы дискриминаторов (3.2), (3.8) дают несмещенные оценки практически с
одинаковыми точностями. Несколько худшую, но также несмещенную оценку
дает формула (3.9). Это имеет место при нерекурсивной обработке короткой
пачки в РЛС S-диапазона и всегда при кадровой обработке длительного сигна­
ла в РЛС Р-диапазона. Если для упрощения обработки применяется рекурсив­
ное накопление энергии пачки, то амплитуды обнаруженных отметок уже не
имеют симметричную форму, так как являются результатом свертки симмет­
ричной диаграммы направленности с асимметричной импульсной характери­
стикой рекурсивного фильтра. В этом случае смещение оценки по формуле
(3.9) зависит от длительности обнаруженной пачки (от мощности сигнала) и
для компенсации систематической ошибки требуется введение поправок, зави­
сящих от числа обнаруженных отсчетов. Эта ситуация проиллюстрирована на
рис. 3.4, где случай 1 соответствует наибольшей мощности сигнала, случай 2 средней мощности, случай 3 - минимальной мощности сигнала. Соответствен­
но проиндексированы значения оценок. Интересно отметить, что величина
ошибки увеличивается при возрастании мощности сигнала.
t,c
Рис. 3.4
Систематическая ошибка алгоритма поиска максимума практически не
зависит от длительности пачки, и компенсация ошибки сводится к постоянной
поправке. Наибольшей чувствительностью обладает алгоритм определения
центра тяжести.
Оценки азимутов пачек, полученные в смежных элементах дальности, ус­
редняются с весами, пропорциональными мощности сигналов. При этом также
уточняется дальность путем весовой обработки амплитуд.
В другом варианте объединение отметок по дальности с уточнением изме­
рений путем весовой обработки проводится при каждом новом поступлении
данных. Таким образом, азимутальная пачка формируется для средневзвешенной
дальности. После окончания пачки ее положение вычисляется по амплитудам
объединенных отметок аналогично тому, как это делается в первом варианте.
В режимах работы по морским и по воздушным загоризонтным целям на
ошибку пересчета азимута в горизонтальную плоскость не влияет отсутствие
измерения угла места. При работе по морским целям их угол места известен,
угол места загоризонтных целей находится в очень узком диапазоне, и в фор­
муле пересчета ему может быть приписано некоторое постоянное значение.
В режимах низкой частоты повторения радиальная скорость измеряется
неоднозначно либо вообще не измеряется.
3.2. Алгоритмы сопровождения целей
в бортовой радиолокационной системе
авиационного комплекса радиолокационного
дозора и наведения
3.2.1. Общие положения
Для БРЛС АК РЛДН характерно применение режимов автоматического со­
провождения многих целей в процессе обзора воздушного пространства (автома­
тическое сопровождение целей в режиме обзора (АСЦРО)). Эффективность все­
го комплекса существенно повышается, если обнаруживаются траектории це­
лей и их взаимное положение по отношению к опорной системе координат,
общей для всех взаимодействующих объектов. Автоматическое сопровождение
целей в режиме обзора - это фактически построение траекторий целей, вклю­
чая и прогнозирование положения точек траектории на некоторое время впе­
ред. Таким образом, под АСЦРО понимается процесс непрерывного форми­
рования оценок относительных и абсолютных фазовых координат целей
при достаточно редком (дискретном) поступлении от них отраженных сигна­
лов. Решение этой задачи осуществляется в несколько этапов, включающих
формирование первичных измерений, завязку траекторий, ее обнаружение,
экстраполяцию фазовых координат (траекторий) в промежутках между поступ­
лениями отраженных сигналов, идентификацию полученных измерений на их
принадлежность к той или иной из сопровождаемых траекторий, коррекцию
(фильтрацию) определенной траектории по результатам идентифицированных
измерений, ранжирование целей по степени их важности (опасности) и сброс
сопровождаемых траекторий.
Важнейшей задачей системы траекторного сопровождения является распо­
знавание класса и типа целей, а также траекторий ложных целей (наземные дви­
жущиеся цели, помеховые отражения от подстилающей поверхности и т.п.).
Рассматриваются также алгоритмы «сопровождения до обнаружения»,
т. е. обнаружение траекторий цели с учетом априорных данных о типе цели и
ее траектории движения.
Исходя из этих задач резко возрастают требования к вычислительным
возможностям процессора сопровождения (до двух тысяч и более траекторий
целей одновременно).
Формирование первичных измерений содержит все этапы первичной обра­
ботки радиосигналов: от их обнаружения до получения отсчетов дальности,
скорости сближения и бортовых пеленгов в горизонтальной и вертикальной
плоскостях (см. выше).
Под завязкой траекторий понимается процесс взятия на сопровождение
целей, появляющихся в зоне обзора БРЛС. Экстраполяция представляет собой
процесс прогнозирования всех фазовых координат относительного движения
целей, которые используются для целеуказания, наведения и выдачи информа­
ции на пункт управления (ПУ).
Цель идентификации результатов поступающих измерений - определить
ту из экстраполируемых траекторий, которой по тем или иным признакам наи­
более достоверно соответствуют полученные наблюдения. Правила установле­
ния такого соответствия могут быть различными и будут изложены далее.
В зависимости от требований к точности сопровождения и вычислитель­
ных возможностей бортовой цифровой вычислительной системы (БЦВС) кор­
рекция (фильтрация) экстраполированных траекторий по идентифицирован­
ным результатам измерений может выполняться по различным законам. Наи­
более часто для этого используются алгоритмы α-, β- и оптимальная линейная
аналого-дискретная фильтрация [9].
Поскольку число целей может превышать число наводимых истребителей,
то для их эффективного применения желательно знать степень опасности
(важности) сопровождаемых объектов. В связи с этим необходимо выделять
наиболее опасные (важные) цели, которые целесообразно уничтожать в первую
очередь. Одним из наиболее часто используемых признаков (критериев) опас­
ности является минимум отношения дальности к скорости. Смысл этого крите­
рия состоит в вычислении времени tB, оставшегося до встречи с сопровождае­
мой целью по результатам экстраполяции (измерения) дальности и скорости.
Та цель, для которой вычисленное значение 1;В=|Д/А| окажется наименьшим, и
считается наиболее опасной.
Сброс цели с сопровождения выполняется в рамках анализа результатов
измерений в процессе завязки траекторий и идентификации наблюдений. Если
в результате анализа выясняется, что полученные результаты не идентифици­
руются ни с одной из экстраполируемых траекторий и при этом не выполняют­
ся условия завязки новой траектории, то цель исключается из процесса сопро­
вождения.
Следует отметить, что каждый из этапов может выполняться различными
способами [10, 13, 14, 19], обеспечивающими различную эффективность режи­
ма в целом. Наиболее распространены в БРЛС АК РЛДН алгоритмы с экстра­
поляцией по гипотезе движения с постоянной скоростью, идентификацией в
стробах отождествления и а-, β-фильтрацией [9, 10, 19].
3.2.2. Алгоритмы АСЦРО с идентификацией измерений
в пробах отождествления и ay β-фильтрацией
Одним из самых простых алгоритмов, применяемых в АК РЛДН, является
АСЦРО, в котором траектории экстраполируются по гипотезе изменения фазо­
вых координат с постоянной скоростью, а результаты измерений идентифици­
руются в стробах отождествления с последующей а-, β-фильтрацией.
Автоматическое сопровождение целей в режиме обзора обеспечивается в
процессе совместного функционирования импульсно-доплеровской БРЛС, ав­
тономных датчиков и БЦВС. Бортовая радиолокационная станция АКРЛДН
формирует оценки дальности Ди до цели, скорости сближения
с ней
и бортовые пеленги в горизонтальной и вертикальной плоскостях:
(вектор измерений
При этом контролируемая зона про­
странства просматривается лучом антенны БРЛС путем последовательного
кругового сканирования антенны. Автономные датчики измеряют углы атаки
аи, крена уи, рыскания ψΗ, тангажа 0И и составляющие вектора скорости носи­
теля по осям подвижной прямоугольной системы координат. Бортовая цифро­
вая вычислительная система осуществляет завязку траекторий и их экстрапо­
ляцию, формирует стробы отождествления и идентифицирует в них результаты
измерений, а также выполняет а-, β-фильтрацию и ранжирование целей по сте­
пени их опасности.
В общем случае первый шаг сопровождения начинается с формирования
текущей позиции (точки) траектории или, как иногда говорят, с получения
первичных данных (измерений) о состоянии цели. Среди потока данных от це­
лей, поступающих на вход системы сопровождения, возможно появление целеподобных ложных отметок, источниками которых являются:
шумовые ложные отметки, распределенные равномерно в зоне обзора;
отметки нераспознанных в первичной обработке «антиподов»-целей, обу­
словленные переотражением сигналов от земной поверхности и коррелирован­
ные с отметками истинных целей;
неподавленные остатки альтиметровой помехи;
отметки, обусловленные ложными комбинациями неоднозначных отсче­
тов дальностей целей, находящихся в неразрешаемой по азимуту скорости и
высоте области.
Следующий шаг сопровождения состоит в оценке соответствия (иден­
тификации) данных о цели с уже ранее определенными траекториями целей.
Если соответствие не установлено, то обнаруженная цель считается новой и
формируется начало новой траектории. Под идентификацией или отождествле­
нием результатов измерений понимается процесс принятия решения об их со­
ответствии той или иной экстраполируемой траектории. Этот процесс состоит
из двух этапов. На первом этапе результаты измерений сопоставляются со
всеми экстраполируемыми траекториями, на втором этапе - выбирается одна
из траекторий, по тем или иным критериям наиболее достоверно соответст­
вующая результатам измерений. Необходимо отметить, что первый этап может
выполняться и по другой стратегии. Каждая из экстраполируемых траекторий
поочередно ставится в соответствие всем принятым за время обзора результа­
там измерений [19]. Выбранная по результатам идентификации траектория
корректируется (фильтруется).
Способы сопоставления и правило принятия решений в процессе иденти­
фикации могут быть различными. Один из них основан на сопоставлении тра­
екторий и результатов измерений в так называемых стробах отождествления.
Под стробом отождествления, именуемым также корреляционным, по­
нимается область многомерного пространства с размерами
где
m - число измеряемых фазовых координат,)
вокруг точки с экстраполированными на ка­
ждом цикле обзора координатами. Пример
пространственного строба ABCD для двух­
мерного пространства (m = 2) показан на
рис. 3.5, где точки Ооу, Оцэ и Оци соответст­
вуют носителю БРЛС, результатам экстрапо­
ляции и измерений положения цели; АД и
ΔφΓ - размеры строба по дальности и борто­
вому пеленгу в горизонтальной плоскости.
Смысл сопоставления в стробах отожде­
ствления состоит в том, что все полученные
от
одной
цели
измерения
Zi
Рис. 3.5
,поочередно сравниваются с анало­
гичными координатами
всех Nu экстраполируемых траек­
торий в пределах допусков AXJ. Если хотя бы для одной фазовой координаты jй цели не выполняется условие
(3.10)
то данная траектория исключается из дальнейшей процедуры принятия решения.
Порядок перебора всех Nu экстраполируемых целей может быть как безприори-
тетным, так и приоритетным. В последнем случае очередность сопоставления
определяется приоритетом (важностью) одной цели перед другими.
Процедура принятия решения о соответствии измерений zHi той или иной
из экстраполированных целей, удовлетворяющих условию (3.10), также может
быть различной. Наиболее простым является
правило принятия решения по первому вы­
полнению условия (3.10). Такой алгоритм
принятия решения пригоден лишь для доста­
точно разнесенных в пространстве целей. Ес­
ли же сопровождаемые цели расположены
достаточно близко, то принятое решение мо­
жет оказаться недостоверным, так как усло­
вию (3.10) могут удовлетворять результаты
экстраполяциии другой цели. Пример такой
ситуации показан на рис. 3.6, где точками ОЦЭ1
и 0Цэ2 показано расположение целей 1 и 2 по
Рис. 3.6
результатам экстраполяции их траекторий,
точка Оци соответствует положению цели по результатам измерений.
Более достоверна процедура принятия решения после дополнительной
обработки результатов сравнения
для всех траекторий, удовлетворяю­
щих условию (3.10). В качестве меры окончательного соответствия измере­
ний zHi той или иной j-й траектории с координатами x3ij может использоваться
расстояние между точками Оц^ и точкой Оци, соответствующей полученным
измерениям. Та траектория, для которой это расстояние будет наименьшим, и
будет считаться идентифицированной. Для случая, приведенного на рис. 3.6,
результатам измерений соответствует вторая траектория ОЦЭ2, поскольку
Размеры стробов отождествления должны одновременно удовлетворять
двум условиям. С одной стороны, они должны обеспечить попадание результа­
тов измерений от соответствующей цели внутрь строба при любых реальных
законах движения сопровождаемого объекта. С другой стороны, число попада­
ний мешающих сигналов внутрь строба должно быть минимальным. Суть од­
ной из самых простых методик выбора размеров стробов состоит в следующем.
Если в результате идентификации выяснится, что полученные измерения
не соответствуют ни одной из экстраполируемых траекторий, то принимается
предварительное решение о наличии новой цели (завязка траектории). По­
скольку процесс обнаружения случаен, то принятое предварительное решение
нуждается в дополнительном подтверждении, суть которого состоит в том, что
по результатам первого измерения прогнозируется положение цели для сле­
дующего цикла. Относительно прогнозируемого положения формируется строб
отождествления, называемый также корреляционным, в котором и ищется от-
раженный сигнал на следующем цикле измерений. Затем процедура повторяет­
ся для следующего цикла измерений. Если в m последовательных циклах цель
обнаруживается k < m раз, то принимается окончательное решение о наличии в
зоне обзора БРЛС новой цели. После этого результаты последних измерений
заносятся в специальный файл БЦВС в качестве начальных условий для после­
дующей экстраполяции новой фазовой траектории. Для принятия окончатель­
ного решения чаще всего используется логика обнаружения два из двух, два из
трех, три из трех и три из четырех [19].
Следует отметить, что процедура реализации процесса завязки траектории
может быть различной. На практике обычно применяется процедура так называе­
мого скользящего окна либо процедура последовательных испытаний Вальда [19].
При процедуре скользящего окна результаты предварительных решений
обрабатываются в нескольких последовательных циклах обзора БРЛС. Смысл
этой процедуры поясняет рис. 3.7.
Рис. 3.7
Пусть последовательность
представляет результаты предвари­
тельного анализа отраженных сигналов во всех циклах измерений. При попада­
нии результатов измерений i-ro цикла в строб отождествления считается, что
Zi=l, в противном случае Zj=0. Если в окне из m последовательных циклов обзора
число обнаружений цели в стробах отождествления достигнет определенного
значения к, то принимается окончательное решение о завязке новой траектории.
В ситуации, когда
, окно из m обзоров смещается на один цикл в сторо­
ну увеличения. На рис. 3.7 новое положение окна показано штриховой линией.
Качество функционирования алгоритмов принятия решения о наличии но­
вых целей характеризуется достоверностью и скоростью завязки траекторий.
Количественно достоверность завязки оценивается вероятностью принятия
правильного решения об обнаружении трассы цели. На рис. 3.8 и 3.9 показана
зависимость вероятности обнаружения трассы Ρ от числа поступивших изме­
рений к для различных значений вероятности обнаружения цели Рпо· Рис. 3.8
соответствует критерию два из трех, рис. 3.9 - критерию последовательного
анализа Вальда.
Рис. 3.8
Рис. 3.9
Видно, что вероятность обнаружения трассы возрастает с увеличением ве­
роятности правильного обнаружения БРЛС и числа циклов проверки перед
принятием окончательного решения.
Скорость завязки характеризуется временем реакции алгоритма принятия
решения, под которым понимается интервал времени между входом новой це­
ли в зону обзора БРЛС и принятием решения о ее наличии. В общем случае это
время - случайная величина, поэтому обычно используют ее математическое
ожидание и дисперсию, аналогами которых являются среднее число циклов до
принятия решения и дисперсия их отклонений.
Важным фактором, влияющим на достоверность и скорость завязки целей,
является размер стробов отождествления. С одной стороны, увеличение разме­
ров этих стробов позволяет повысить вероятность повторного обнаружения ин­
тенсивно маневрирующих целей на следующем цикле измерений. С другой
стороны, увеличивается вероятность попадания в большой строб совсем другой
цели. В связи с этим важной задачей является обоснование оптимальных в не­
котором смысле размеров корреляционных стробов.
Суть одной из наиболее простых методик выбора размеров стробов ото­
ждествления состоит в следующем.
Пусть на k-м цикле обзора получены некоррелированные измерения
(3.11)
то которым принято предварительное решение о наличии цели.
Для следующего цикла фазовая координата Xj экстраполируется по закону
(3.12)
(3.11) и (3.12)
- центрированный гауссовский шум с известной диспер!ей
- интервал времени между двумя обзорами.
Если скорость х(к) в (3.12) не измеряется, то она полагается случайным
уссовским процессом с нулевым средним. Дисперсия этого процесса Dki
итывает степень неопределенности возможных значений скорости. В такой
туации разность измерений
(3.13)
«условленная перемещением цели за время Т, также представляет центрирошный гауссовский случайный процесс с дисперсией
(3.14)
Тогда для разности измерений Δζ практически достоверно будет выпол­
няться условие
. Отсюда следует, что
величину
(3.15)
можно использовать в качестве строба отождествления для фазовой координа­
ты Xi. На практике коэффициенты ki3, определяющие заданную вероятность по­
падания Δζι в выбранный строб, выбираются в пределах
(3.16)
Необходимо отметить, что для различных фазовых координат Xj и на раз­
ных циклах измерений значения ki3 могут быть различными.
Недостатком данного метода является нестрогость допущения о гауссовском характере распределения неизмеряемых скоростей ц, закон распределе­
ния которых более точно соответствует равновероятному. Однако этот недос­
таток проявляется лишь при выборе размеров первого строба для второго цик­
ла измерений, после которого уже можно вычислить скорость Xj, рассчитать
более точное значение дисперсии D^ и скорректировать размеры строба. Если
же скорость Xj измеряется (вычисляется), то в формуле (3.15) дисперсия D^
определяется дисперсией D ild измерений (вычислений) скорости. В такой си­
туации применение формулы (3.15) является более правомерным.
В [19] рассмотрен другой способ получения (3.15), основанный на использовании свойств распределения квадратичной формы AzjDki по закону хиквадрат.
3.2.3. Сопровождение целей и фильтрация траекторий
Фильтрация траекторий и применение алгоритмов фильтрации необходи­
мы для сглаживания данных о наблюдаемых целях и прогнозирования после­
дующего положения цели [9]. Сопровождение начинается с формирования
прогнозированного значения в положении цели на основе данных первого из­
мерения (первого значения вектора состояния цели). Прогнозируемое значе­
ние координат цели используется для установки строба соответствия в пози­
цию возможного последующего положения цели. Наиболее близкое к центру
строба соответствия значение измеренного положения цели в следующем так­
те используется для последующего шага в построении траектории и т. д.
Система координат, в которой выполняется сопровождение целей, обыч­
но прямоугольная, хотя положение цели относительно БРЛС определяется в
сферической системе координат: дальность, азимут и угол места цели, а так­
же, возможно, и относительная скорость движения цели. Сопровождение це­
лей в сферической системе связано с большими вычислительными трудно­
стями, так как^даже при прямолинейном движении цели с постоянной скоро­
стью в уравнениях сопровождения появятся члены с ускорениями по всем
координатам.
Наиболее удобно и просто использовать алгоритмы линейной фильтра­
ции координат типа так называемых а-, β-фильтров. Сглаживание в этом слу­
чае определяется следующими уравнениями (для каждой из координат):
(3.17)
(3.18)
(3.19)
где
- сглаженное значение координаты χ на k-м такте обзора (оценка
значения х);
- сглаженное значение скорости по оси х;
- прогно­
зируемое значение положения цели по оси χ на k-м такте обзора. Τ - период
обзора или, точнее, интервал обновления данных о цели;
- измеренные
значения координат на k-м такте; α и β - коэффициенты сглаживания (коэффи­
циенты усиления невязки измерений).
Прогнозируемое значение вычисляется по формуле (3.19) при условии по­
стоянства скорости цели
Коэффициенты сглаживания могут быть постоянными или адаптивными.
Если коэффициенты адаптивны, то они зависят от статистических свойств раз­
личий между прогнозируемым и измеренным значениями и от шумов измере­
ний. Если коэффициенты α и β постоянны, то фильтр называется α-, βфильтром. Если коэффициенты а и β адаптивны, то алгоритм соответствует
фильтрации Калмана. В общем случае постоянные коэффициенты а- и βфильтра могут изменяться в процессе сопровождения цели в зависимости от
номера такта к:
(3.20)
(3.21)
Если номер такта увеличивается, то при неизменном законе движения це­
ли коэффициенты α и β приближаются к нулю, обеспечивая глубокое усредне­
ние (сглаживание) измеренных значений координат. Обычно применяют в про­
цессе сопровождения два-три изменения значений коэффициентов α и β: на на­
чальном этапе сопровождения, на среднем участке, например, при к от трех до
шести, и при установившемся состоянии, когда k = 10-15.
Если известна модель движения цели, то оптимальным линейным фильт­
ром сглаживания и оценивания координат, как известно, является фильтр Кал­
мана. Работа фильтра Калмана во многом аналогична а-, β-фильтру, за исклю­
чением того, что коэффициенты сглаживания определяются в зависимости от
уровня шумов измерений и погрешностей прогноза. В частности, коэффициент
α может быть выбран в соответствии с формулой
(3.22)
где
- дисперсия погрешности прогнозирования положения цели на (к+1)-м
такте;
- дисперсия погрешности измерения положения цели.
Фильтр Калмана представляет собой рекурсивный фильтр, который ми­
нимизирует среднеквадратическую ошибку текущего оценивания координат
цели. В реальных системах АК РЛДН фильтр Калмана реализовать достаточно
сложно, во-первых, из-за большого объема требуемых вычислений в бортовой
ЭВМ и, во-вторых, из-за необходимости точно знать модель движения цели.
Система фильтрации в режиме АСЦРО по своей природе достаточно противо­
речива: она должна обеспечивать хорошее сглаживание текущих оценок коор­
динат цели при наличии шумов измерений (коэффициенты α и β при этом
должны быть малыми) и в то же время система сопровождения должна хорошо
отслеживать внезапные маневры цели (коэффициенты α и β должны быть при
этом достаточно большими).
Модель прямолинейного движения цели с постоянной скоростью является
наиболее простым вариантом, при котором сопровождение выполняется доста­
точно просто. При наличии маневра цели характеристики сопровождения су­
щественно ухудшаются. При этом увеличивается различие прогнозируемого и
измеренного положения цели, что может привести в итоге к срыву сопровож­
дения цели. Для устранения указанного недостатка в системах АСЦРО иногда
применяют вариант фильтрации с использованием так называемого режима
«обнаружения маневра». В этом случае в системе сопровождения формируют­
ся два строба соответствия (рис. 3.10).
Первый строб - строб соответствия для неманеврирующей цели, а второй
строб - для маневрирующей цели. Центры стробов совпадают и соответствуют
прогнозируемому положению цели на k-м такте сопровождения. Если обнару­
жена цель в области строба для неманеврирующей цели, то а-, β-фильтр сле­
жения работает в режиме, который был установлен для неманеврирующей це­
ли. В этом случае, когда обнаруженная цель вышла из строба неманеврирую­
щей цели и находится в пределах строба для маневрирующей цели,
принимается решение, что цель совершает маневр, и для сопровождения такой
цели полосу а-, β-фильтра следует увеличить. Увеличение полосы пропускания
фильтра соответствует увеличению значений коэффициента а. Энергично ма­
неврирующая цель сопровождается, если коэффициент α выбрать в пределах
0,8...0,9, а слабо маневрирующая цель достаточно хорошо сопровождается при
значении α порядка 0,1...0,15. Для устранения опасности принять появление
Рис. 3.10
ложной цели, обусловленное превышением порога обнаружения шумами или.
преднамеренными помехами, при наличии признака маневра цели дополнитель­
но «завязывается» новая траектория. Таким образом, траектория цели на k-м так­
те раздваивается: одна траектория сохраняет характер движения цели, который
был на более ранних тактах, другая, новая, соответствует маневру цели. На сле­
дующем такте обнаружения (или через один такт) неопределенность, связанная с
наличием двух траекторий, устраняется путем стирания данных о новой ветви
траектории, если получила подтверждение траектория для неманеврирующеи
цели. Если же маневр подтвердился, то стираются данные о продолжении «ста­
рой» траектории. Другое возможное решение состоит в том, что применяется
фильтр Калмана с новой моделью движения цели, обусловленной маневром.
3.3. Алгоритмы автоматического сопровождения целей
в режиме обзора с адаптивной коррекцией прогноза
и бесстробовой идентификацией радиолокационных
измерений
Расширение номенклатуры сверхманевренных самолетов [1-3] и интен­
сивное развитие групповых действий с большим числом самолетов в сложных
быстроизменяющихся условиях применения, потребовали разработки более со­
вершенных разновидностей АСЦРО, основанных на использовании более
сложных моделей движения, бесстробовых методов идентификации и более
сложных алгоритмов адаптивной фильтрации. Некоторые варианты таких ал­
горитмов АСЦРО приведены в [6, 15, 16].
Ниже рассматривается один из перспективных алгоритмов АСЦРО, в ко­
тором органично сочетаются высокая точность оценивания координат при со­
провождении маневрирующих целей, основанная на адаптивной коррекции
прогноза, и высокая разрешающая способность, дающая возможность досто­
верно сопровождать близкорасположенные цели при весьма незначительной
требуемой производительности бортовой вычислительной системы [13].
Для решения этой задачи целесообразно использовать алгоритм адап­
тивной аналого-дискретной фильтрации с коррекцией прогноза, который
позволяет для процесса
(3.23)
по идентифицированным измерениям
(3.24)
где
(3.25)
сформировать оценки по правилу
(3.26)
(3.27)
(3.28)
(3.29)
(3.30)
(3.31)
χ, х э , χ - n-мерные векторы состояния, экстраполяции и оценок; Φ - пере­
ходная матрица состояния; ζ - m-мерный ( m < η ) вектор измерений; Η - мат­
рица связи ζ и χ; Dx и DH - ковариационные матрицы шумов состояния ξχ и
измерений ξΗ ; τ - интервал экстраполяции; Τ - период обращений к цели;
Q - признак наличия измерений; Кф - матрица коэффициентов усиления не-
вязки
- апостериорная и априорная ковариацион­
ные матрицы ошибок оценивания; Ε - единичная матрица;
(3.32)
(3.33)
- адаптивная поправка прогноза, оптимальная по минимуму функционала ка­
чества [14]
(3.34)
в котором
- соответственно матрицы штрафов за точность прибли­
жения χ κ ζ и за величину управляющих поправок u .
Решение о принадлежности полученного измерения (3.24) той или иной из
экстраполируемых траекторий (3.27) принимается по минимуму функционала
(3.35)
формируемого по результатам полученных измерений на основе вычисления
Uy для всех j-x экстраполируемых траекторий. Очевидно, что при соответствии
полученных измерений экстраполируемой траектории они незначительно от­
личаются от
в (3.32) и u(k) будет минимальным. Если измерения
приходят от другой цели, то невязка в (3.32) увеличивается, что приводит к
увеличению иу· и, соответственно, к увеличению функционала (3.35). Та траек­
тория, для которой функционал (3.35) будет наименьшим, и считается иденти­
фицированной. Использование бесстробового метода идентификации, осно­
ванного на экстремальном (3.35), а не на пороговом критерии, позволит суще­
ственно снизить недостатки стробовой идентификации [15].
Ниже будут рассмотрены совместно функционирующие алгоритмы экс­
траполяции, идентификации радиолокационных измерений и коррекции
результатов экстраполяции по идентифицированным измерениям в пред­
положении, что завязка траектории уже выполнена одним из известных спосо­
бов [6]. Этап ранжирования целей и сброса траекторий не рассматривается.
В существующих бортовых РЛС алгоритмы многоцелевого сопровожде­
ния базируются на использовании простейших моделей движения с постоян­
ными скоростями [8, 11]. Принципиальной причиной использования таких гру­
бых моделей в АК РЛДН являются большие интервалы времени между поступ­
лениями отраженных сигналов при механическом сканировании антенной,
превышающем время жизни сложных гипотез движения воздушных целей. Ис­
пользование ФАР с электронным управлением лучом позволяет существенно
сократить интервалы времени между обращениями к одной цели. С учетом это­
го возможно использовать для прогноза модели движения третьего порядка:
в которых Д и V - дальность до цели и скорость сближения с ней; ε Γ , εΒ и
ωΓ, ωΒ - соответственно углы визирования и угловые скорости линий визиро­
вания в горизонтальной и вертикальной плоскостях;
- продольное
и поперечные в горизонтальной и вертикальной плоскостях ускорения; к номер интервала дискретизации
- центрированные гауссовские шумы состояния с известными дисперсиями D^ , D j r и Ό-Β .
Следует отметить, что модели состояния (3.36)-(3.44) обеспечивают оце­
нивание всех фазовых координат, используемых в современных методах наве­
дения.
Для формирования оценок всех фазовых координат (3.36)-(3.44) в соответ­
ствии с критерием наблюдаемости [10] необходимо, как минимум, измерять
дальность и углы визирования εΓ и ε Β . При использовании импульснодоплеровского режима работы РЛС с высокой частотой повторения достаточно
просто измеряется скорость сближения (доплеровская частота). Тогда модель
наблюдений определяется отношениями
(3.45)
(3.46)
(3.47)
(3.48)
где
зирования цели;
- измеренные значения дальности, скорости и углов ви­
- центрированные гауссовские шумы из­
мерений с известными дисперсиями
Геометрические соотношения, иллю­
стрирующие взаимное расположение цели
и носителя РЛС в горизонтальной плоско­
сти, приведены на рис. 3.11. На рисунке
Уц - вектор скорости цели; 0 Х о у - про­
дольная ось носителя РЛС; Δε - текущая
ошибка измерений; ψ - курс носителя;
РСН - равносигнальное направление.
Модели состояния (3.36)-(3.44) и из­
мерителей (3.45)-(3.48) для дальномерного
и угломерного каналов могут быть пред­
ставлены в векторно-матричной форме
(3.23) и (3.24):
(3.49)
(3.50)
Используя (3.49) в (3.26)-(3.31), получим алгоритм фильтрации в далъномерном канале РЛС:
(3.51)
(3.52)
(3.53)
где
(3.54)
- вычисляемые по правилу (3.32), (3.33) адаптивные поправки к прогнозу
(3.52), оптимальные по минимуму функционала (3.34)
(3.55)
в котором
(3.56)
В соотношениях (3.51) и (3.52) Д3 и V3 - начальные значения дальности и
скорости, формируемые на этапе завязки;
- коэффици­
енты усиления невязок (3.53), вычисляемые в процессе решения уравнений
(3.29)-(3.31); г- - коэффициенты, учитывающие вес невязок (3.53) при вычис­
лении поправок
по закону (3.33).
Анализ алгоритмов фильтрации (3.51)-(3.54) позволяет прийти к следую­
щим заключениям.
1. Полученный алгоритм отличается от классического алгоритма калмановской фильтрации наличием аддитивных адаптивных поправок (3.54) про-
гноза, а также тем, что сам прогноз (3.52) осуществляется с малым шагом Τ ,
приближаясь по точности к аналоговым процедурам предсказания, в то время
как невязки (3.53), коэффициенты их усиления (3.29), (3.30) и поправки (3.54)
вычисляются с существенно большей дискретностью по мере получения изме­
рений (3.45), (3.46).
2. Поправки прогноза (3.32), (3.33), (3.54) зависят от параметров первич­
ных измерителей (Η ), синтезированных фильтров ( K o i j ) и от условий приме­
нения, определяющих конкретные значения
. Это позволяет
получить систему фильтрации, адаптивную к выбранным первичным измери­
телям, синтезированному фильтру и закону изменения отслеживаемой траекто­
рии. В начальные моменты времени, когда коэффициенты К ф - фильтра велики
и он динамично реагирует на первоначальные ошибки завязки траекторий
, поправки и д , uv и И:Д незначительны. В то же время
в установившемся режиме работы фильтра, когда К ф - малы и он плохо реаги­
рует на изменение входных сигналов (эффект старения измерений [14]), коэф­
фициенты ι·; передачи невязок возрастают, и прогноз (3.52) существеннее кор­
ректируется поправками (3.54).
3. Если реальные условия функционирования фильтра соответствуют ги­
потезе движения, использованной при его синтезе, то невязки малы
(АД « 0 , AV « 0 ) и прогноз (3.52) практически не корректируется. Если реаль­
ные траектории целей соответствуют более сложным гипотезам движения, то
возрастают невязки (3.53), корректирующие поправки и д , uv и и-^ (3.54), из­
меняются экстраполированные значения фазовых координат (3.52), а соответ­
ственно, и оценки (3.51).
Использование (3.50) в алгоритмах (3.29)-(3.33) дает возможность получить
аналогичные алгоритмы адаптивной аналого-дискретной фильтрации для угло­
мерных каналов, формирующих оценки
и для которых
справедливы все выводы, сделанные для фильтра дальномерного канала.
В соответствии с (3.35) решение об идентификации полученных измере­
ний (3.45)-(3.48) принимается по минимуму функционала
(3.57)
в процессе его поочередного вычисления для всех j экстраполируемых траек­
торий. Та траектория, для которой функционал (3.57) будет наименьшим, и
считается наиболее достоверно соответствующей данному измерению.
Весовые коэффициенты
, определяемые важностью
той или иной поправки для всего режима в целом, могут выбираться по раз­
личным правилам. Наиболее простым из них является правило равнозначности,
в соответствии с которым вклад всех слагаемых в функционал (3.57) полагает­
ся одинаковым [10].
Достоинством рассмотренной процедуры бесстробовой идентификации
по правилу (3.57) является отсутствие ограничений на разрешающую способ­
ность, налагаемых размерами стробов, учет предыстории движения в (3.54),
(3.57), что позволяет снизить вероятность перепутывания близкорасположен­
ных и пересекающихся траекторий, снижение вероятности сопровождения
ложных целей, поскольку здесь вероятность ложных тревог определяется
размерами элементов разрешения, а не существенно большими размерами
стробов отождествления. Еще одно достоинство бесстробовой идентифика­
ции - возможность адаптации фильтров сопровождения за счет адаптивной
коррекции прогноза.
Эффективность алгоритмов автоматического сопровождения целей в ре­
жиме обзора с бесстробовой идентификацией и адаптивной коррекцией про­
гноза, определяемых соотношениями (3.51)-(3.57), иллюстрируется на примере
функционирования дальномерного канала РЛС на этапах экстраполяции, иден­
тификации измерений и фильтрации. Эффективность алгоритмов определялась
по показателям точности оценивания фазовых координат, используемых для
управления самолетом-носителем, по разрешающей способности по этим коор­
динатам и достоверности правильной идентификации радиолокационных из­
мерений при сопровождении далеко и близкорасположенных неманеврирующих и маневрирующих целей, в том числе и на пересекающихся трассах.
В качестве оценки точности использовались среднеквадратические ошиб­
ки GR, σν оценивания дальности Д до цели и скорости сближения V с ней, рас­
считываемые по классической формуле
(3.58)
где
- соответственно реальное значение и оценка i-й фазовой коорди­
наты (I = Д, V) на k-м шаге; N - число однотипных реализаций.
Под разрешающей способностью понималась минимальная разность в ко­
ординатах, при которой с вероятностью не хуже заданной принимается реше­
ние о наличии двух целей.
Результаты получены путем имитационного моделирования траекторий
целей (3.36)-(3.38), результатов измерений (3.45), (3.46), алгоритмов аналогодискретного оценивания и бесстробовой идентификации (3.51)-(3.57).
Точность формирования оценок дальности и скорости сближения оцени­
валась при следующих условиях:
объектом сопровождения является слабо маневрирующая цель;
периоды обращения к целям изменяются в интервале от Τι=0,4 до Т2=3,2 с;
диапазон изменения дальностей
км;
время накопления меняется от 10 до 20 мс;
используются измерители с ошибками а ди , Оуи,
имеют место начальные ошибки завязки траектории по дальности АД0 и по
скорости AVo.
На рис. 3.12, я, б показаны реализации изменения дальности до цели и
скорости сближения с ней. На рис. 3.13, а, б и 3.14, а, б для этого варианта при­
ведены зависимости относительных СКО оценивания дальности Стд/адтахи
скорости сближения σν / oymax для времен обращения к цели Τι и Τι>Τ2 соот­
ветственно. Пилообразный характер графиков объясняется тем, что в проме­
жутках между поступлениями измерений возрастают ошибки экстраполяции, а
в моменты прихода измерений происходит коррекция оценок фазовых коорди­
нат по измерениям, которая сопровождается уменьшением ошибок. Мини­
мальные значения СКО ошибок оценивания фазовых координат σ χ ί опреде­
ляются значениями СКО шумов состояния процесса (3.36)-(3.38) и измерения
(3.45), (3.46), а максимальные значения σ χ ί зависят еще и от величины интер­
вала времени обращения к цели, поскольку эти величины определяют ошибки
экстраполяции (3.52).
Рис. 3.12
Рис. 3.14
Чувствительность функционала бесстробовой идентификации (3.57) к
приходу измерений от другой цели, а также разрешающая способность и дос­
товерность идентификации радиолокационных измерений, определялись путем
имитации измерений от другой цели в момент времени t = 30с с приращением
значений дальности и скорости на величины АД = 1000 м и AV = 100м/с соот­
ветственно. На рис. 3.15 показаны реализации дальности и скорости, и резуль­
таты их измерений.
Рис. 3.15
На рис. 3.16 и 3.17 показаны изменения функционала I (3.57) соответст­
венно при наличии приращений по дальности и скорости, который в момент
времени t = 30 с имеет максимальное значение и свидетельствует о высокой
чувствительности функционала к приходу измерений от другой цели.
Рис. 3.16
Рис. 3.17
На рис. 3.18 и 3.19 приведены графики зависимостей вероятности пра­
вильного принятия решения о приходе измерений от другой цели Р пр д и Р пр v
от величины приращения ошибки измерений по дальности АД и скорости
сближения AV при значениях времени обращения к цели Т\ (штриховая ли­
ния), Т2>Т1 (пунктирная линия). Разнос целей по дальности при этом изменял­
ся в пределах 10<АД<1000 м, а по скорости сближения 1<AV<100 м/с. Из
рис. 3.18 видно, что при длительности зондирующего импульса tH = 1 мкс, при
которой потенциальное разрешение по дальности определяется величиной 150 м,
бесстробовый способ идентификации позволяет практически достоверно раз­
личать цели даже при достаточно редком обращении к ним.
Рис. 3.18
Рис. 3.19
Алгоритм бесстробовой идентификации имеет следующие свойства.
1. При приходе измерений от других целей (даже близкорасположенных)
функционал (3.57) изменяется на несколько порядков, что позволяет достаточ­
но просто регистрировать эти изменения. В связи с этим использование мини-
мума функционала в качестве решающего правила является эффективным
средством идентификации измерений.
2. С ростом требований к достоверности принятия решения о приходе изме­
рений от другой цели чувствительность алгоритма идентификации ухудшается.
3. Чувствительность алгоритма идентификации несколько улучшается при
уменьшении времени обращения к цели и существенно улучшается при увели­
чении точности первичных измерений.
4. Способ бесстробовой идентификации на основе адаптивной коррекции
прогноза обеспечивает в реальном диапазоне потенциальных разрешающих
способностей практически 100%-ую достоверность идентификации в очень
широком диапазоне изменений периодов обращения к цели.
Эффективность функционирования алгоритма АСЦРО при сопровожде­
нии двух целей, движущихся по пересекающимся траекториям, определяется
законом пересечения траекторий как по одной, так и по всем измеряемым ко­
ординатам. На рис. 3.20 и 3.21 а, б представлены взаимное расположение само­
лета-носителя БРЛС и двух целей, движущихся по пересекающимся траектори­
ям, а также законы изменения дальности и скорости сближения, соответст­
вующих ситуации, когда имеет место пересечение по дальности. На рис. 3.22
приведены зависимости функционалов Ιϋ и Ц (3.57) при сопровождении этих
целей. Индексы ii (i = 1,2) соответствуют ситуации, когда функционалы вычис­
ляются при условии, что приходят измерения от i-x (своих) целей, а индексы ij
(i, j = 1,2; i Φ)) соответствуют функционалам, вычисляемым при приходе изме­
рений от «чужих» целей.
Рис. 3.21
Рис. 3.22
Из рисунков видно, что функционалы реагируют на приход каждого изме­
рения, при этом скачки функционалов L в одни и те же моменты времени на
несколько порядков превышают скачки функционалов 1Й, в том числе и в мо­
менты пересечения траекторий.
Рассмотренный алгоритм АСЦРО с адаптивной коррекцией прогноза и
бесстробовой идентификацией радиолокационных измерений дает возмож­
ность устойчиво и с высокой точностью сопровождать множество целей, в том
числе и интенсивно маневрирующих и движущихся по пересекающимся и
близкорасположенным траекториям.
Литература
1. Бабич В.К., Баханов Л.Е., Карпеев В.И. и др. Авиация ПВО России и научно-технический
прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А. Федосова. М.: Дрофа, 2001.
2. Баранов Н., Ивенин И., Каневский М. и др. Сверхманевренность - средство побеждать. Авиапанорама, 1999, № 1.
3. Верба B.C. Управление информационными возможностями многофункциональных бортовых
радиолокационных комплексов. - Радиотехника, 2007, № 10.
4. Верба B.C. Формирование режима обнаружения и распознавания наземных целей в много­
функциональном авиационном комплексе разведки, оповещения и управления. - Радиотех­
ника, 2006, № 1.
5. Верба B.C., Вакуленко А.А., Дод В.Н., Пильщиков Д. Ε'. Методика выбора в реальном масштабе
времени эффективного варианта цифровой обработки радиолокационной информации в мно-,
гофункциональном радиотехническом комплексе с трассовым выходом. - Радиотехника,
2005, № 5.
6. Верба B.C., Гандурин В.А., Меркулов В.И. Идентификация радиолокационных измерений при
многоцелевом сопровождении. // Тез. Докл. V Всерос. науч.-техн. конф. по радиооптическим
технологиям. - Туапсе. М.: МГТУ им. Н.Э. Баумана, 2008.
7. Верба B.C., Дод В.Н., Шкутник Е.Э. Оценка эффекта введения управления процессами циф­
ровой обработки информации в АК РЛДН оперативно-стратегического назначения в интере­
сах повышения устойчивости наведения истребителей на воздушные цели. // Материалы
XXXIII военно-научн. конф. - Тверь: ВУ ПВО, 2004.
8. Верба B.C., Ефремов А.С, Криштопов А.В. и др. Радиолокационный метод измерения полно­
го вектора скорости цели. - Радиотехника, 2007, № 10.
9. Дудник П.И., Кондратенков Г.С, Татарский Б.Г. и др. Авиационные радиолокационные
комплексы и системы. - М.: ВВИА, 2006.
10. Крутъко П.Д., Максимов A.M., Скворцов Л.М. Алгоритмы и программы проектирования ав­
томатических систем. - М.: Радио и связь, 1988.
11. Кузьмин СЗ. Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000.
12. Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на фоне помех. - М.: Сов. радио, 1978.
13. Меркулов В.И. Алгоритмы автоматического сопровождения в режиме обзора с адаптивной
коррекцией прогноза и бесстробовой идентификацией радиолокационных измерений. Радиотехника, 2008, № 1.
14. Меркулов В.К, Дрогалин В.В., Лепин В.Н. и др. Авиационные системы радиоуправления. Т. 1.
Принципы построения систем радиоуправления. Основы синтеза и анализа / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003.
15. Меркулов В.И., Старостин В.В., Филатов А.А., Шуклин А.И. Синтез бесстробовых алгорит­
мов многоцелевого сопровождения с адаптивной аналого-дискретной фильтрацией. - Радио­
техника, 2002, № 12.
16. Меркулов В.И., Старостин В.В., Филатов А.А., Шуклин А.И. Эффективность алгоритмов
многоцелевого сопровождения с бесстробовой идентификацией и адаптивной аналогодискретной фильтрацией. - Радиотехника, 2003, № 3.
17. Петров В.В., Колтышев Е.Е., Янковский В. Т. Алгоритм измерения дальности в радиолокаци­
онных станциях с квазинепрерывными сигналами. - Радиотехника, 2002, № 5.
18. Рейнгольд Э., Нивергелъд Ю., Део Н. Комбинаторные алгоритмы. Теория и практика. М.: Мир, 1980.
19. Фарина А. Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение
целей: Пер. с англ. - М.: Радио и связь, 1993.
ГЛАВА 4
ПОМЕХОЗАЩИЩЕННОСТЬ БОРТОВОЙ
РАДИОЛОКАЦИОННОЙ СИСТЕМЫ
В условиях применения противником средств радиоэлектронного подав­
ления (РЭП) эффективность авиационных комплексов радиолокационного до­
зора и наведения в значительной степени будет зависеть от успешного функ­
ционирования бортовой радиолокационной системы. Поэтому при разработке
БРЛС пристальное внимание необходимо уделить обеспечению ее зашиты от
преднамеренных помех, которые могут быть маскирующими и имитирующими
и действовать как по основному, так и по боковым лепесткам диаграммы на­
правленности БРЛС.
Защиту БРЛС от помех необходимо обеспечивать путем проведения ком­
плекса мероприятий организационного и технического характера, предусмат­
ривающего, прежде всего, использование соответствующих сигналов, алгорит­
мов, методов и устройств помехозащиты.
Создание помехозащищенной БРЛС для прогнозируемых условий радио­
электронного подавления - весьма сложная задача. Это обусловлено значи­
тельным улучшением возможностей средств РЭП в современных условиях. Вопервых, за счет внедрения в станции помех цифровой техники появилась воз­
можность формировать эффективные сигналоподобные помехи, в частности
многократные по дальности и скорости, и имитирующие помехи. Эти помехи
затрудняют либо делают невозможным процесс наблюдения сигналов цели в
режиме обзора и приводят к срыву слежения в режиме автоматического сопро­
вождения целей. Во-вторых, в практику радиоэлектронной борьбы (РЭБ) вне­
дрены принципы коллективной обороны, что позволило создавать высокоэф­
фективные многоточечные по пространству (пространственно разнесенные)
помехи, препятствующие радиолокационному наблюдению целей. Указанные
помехи существенно затруднят функционирование БРЛС.
На сегодняшний день известны десятки различных способов борьбы с
преднамеренными помехами, а также методов измерения координат и сопро­
вождения постановщиков этих помех.
В данном разделе книги предложены некоторые из них: метод защиты
от ответных импульсных помех, основанный на совместном применении разностно- и суммарно-дальномерного способов определения координат, кинема-
тический метод оценки координат целей - постановщиков активных помех; ме­
тод и реализующий его алгоритм самотриангуляции - в АК РЛДН для сопро­
вождения ПАП. Кроме того, даны предложения по технической реализации за­
данного уровня помехозащищенности БРЛС за счет применения автокомпенса­
торов, конфликтно-устойчивого управления зондированием, вариантами
обработки и комплексирования информации.
4.1. Показатели помехозащищенности бортовой
радиолокационной системы. Принципы достижения
требуемого уровня помехозащищенности
В настоящее время вероятный противник при ведении боевых действий
особое внимание уделяет комплексному и взаимосвязанному по времени и
пространству применению всех средств РЭБ. Важнейшая роль при этом отво­
дится использованию средств РЭП для постановки помех средствам радиоэлек­
тронной разведки.
Основные принципы применения средств РЭП состоят в следующем: про­
ведение разведки местоположения и тактико-технических характеристик ра­
диоэлектронных систем - объектов подавления - как на этапе планирования,
так и в ходе боевых действий; планирование радиоэлектронного подавления с
учетом общего замысла боевых действий с целью постановки помех всем ос­
новным каналам РЭС и степени угрозы со стороны РЭС при комплексном при­
менении бортовых и наземных средств РЭП, управляемого оружия и рацио­
нальном распределении помех по частоте, пространству и времени.
Способность БРЛС к решению функциональных задач в условиях ведения
противником радиоэлектронной борьбы характеризуется ее помехозащищен­
ностью (защищенностью от преднамеренных радиопомех). Помехозащищен­
ность БРЛС определяется защищенностью от непосредственной разведки
комплексами РЭП противника (скрытность функционирования) и помехо­
устойчивостью. Защищенность от непосредственной разведки комплексами
РЭП противника - это способность противостоять добыванию аппаратурой ра­
диоэлектронной разведки комплексов РЭП противника разведывательных дан­
ных, необходимых для создания эффективных радиопомех. Помехоустойчи­
вость БРЛС - это способность выполнять функциональные задачи с требуе­
мым качеством при воздействии на нее радиопомех. Комплексное применение
противником помех различного вида приводит к существенному снижению
эффективности БРЛС АК РЛДН.
Повышение помехозащищенности БРЛС в условиях радиоэлектронного
подавления может быть достигнуто путем применения комплекса организаци­
онных мероприятий и технических мер, направленных на снижение эффектив-
ности воздействия помех, к числу которых относятся комплексирование ин­
формации разнотипных РЭС, согласованное применение разнотипных РЭС и
средств огневого поражения, оптимальное распределение режимов работы
РЭС, установление временных, частотных, пространственных и других ограни­
чений на их работу и др.
Реализация указанных мер должна базироваться на методы управления
РЭС, входящих в состав БРЛС, в динамике конфликта, позволяющие обеспе­
чить согласование режимов функционирования и обработки информации раз­
нотипных РЭС [8, 11, 12].
В интересах повышения помехозащищенности с учетом условий реали­
зуемости и динамической изменяемости параметров помеховой обстановки в
районе боевых действий требуется организация иерархического управления
РЭС в динамике конфликта. В частности, первый уровень адаптации - дина­
мическое управление конфигурацией подвижного радиолокационного поля
АК РЛДН с учетом характера решаемых задач и идентифицируемых (прогно­
зируемых) параметров помех, режимами БРЛС, определяющими их простран­
ственные возможности, а также вариантами комплексирования координатной и
пеленговой информацией. При этом вследствие динамичности изменения па­
раметров обстановки организуется координирующее управление для каждого
РЭС, определяющее требуемую конфигурацию и зонные характеристики. Ва­
рианты комплексирования РЭС могут также целенаправленно изменяться на
различных этапах боевых действий.
Для технической реализации управления конфигурацией создаваемого
РЛП требуются использование РЭС с изменяемыми характеристиками зон обт
зора и применение программного обзора. Для технической реализации управ­
ляемого комплексирования радиолокационной информации (РЛИ) требуется
обеспечение возможности адаптивного взаимодействия нескольких АКРЛДН
и получения при этом дополнительной информации с учетом складывающейся
помеховой обстановки и этапов боевых действий.
Второй уровень адаптации (уровень БРЛС) организуется вследствие
скоротечности изменения параметров обстановки и запаздывания централизо­
ванного управления при этом. Для взаимодействия уровней управления РЭС в
динамике конфликта предлагается оперативно оценивать «текущие» зоны об­
зора в интересах формирования координирующего управления.
Применительно к задачам тактико-технико-экономического обоснования
БРЛС АК РЛДН с заданным уровнем помехозащищенности и получения ра­
циональных вариантов их боевого применения доминирующими являются сле­
дующие положения:
при обосновании требований к РЭС как к компонентам системы их кон­
кретный облик и тактико-технические характеристики рассматриваются не
изолированно, а с учетом их роли и места в создаваемой системе;
при разработке предложений по совершенствованию РЭС и способов их
боевого применения существует абсолютный приоритет конечной (глобальной)
цели основной функции, основного предназначения системы, при этом любая
попытка изменения управляющих параметров должна оцениваться с точки зре­
ния того, помогает или мешает она достижению конечной цели;
при оценке вариантов РЭС и рациональных способов их боевого примене­
ния необходимо иерархическое (как минимум, трехуровневое) изучение: уров­
ня элементов средств, уровня отдельных образцов РЭС, уровня систем РЭС;
при анализе интегрированных свойств и закономерностей исследуемых
РЭС требуется раскрытие базисных механизмов интеграции с учетом совмест­
ного рассмотрения структуры, а также особенностей отдельных подсистем РЭС
(это означает, что в случае необходимости придания системе новых функций
целесообразно альтернативно пересмотреть ее структуру, а не только пытаться
реализовать новую функцию в принятой ранее схеме).
Для реализации системного подхода при разработке методов и алгоритмов
управления БРЛС АК РЛДН в динамике конфликта необходимо использовать
следующие общие принципы: рассмотрение любой части системы выполнять
совместно с ее связями с окружением; совместное рассмотрение системы как
таковой и как совокупности частей (элементов); сочетание централизованного
и децентрализованного управлений; учет прогнозируемых неопределенностей
и случайностей в системе; результаты требуемой эффективности функциони­
рования системы необходимо получать при минимальных затратах; решения,
действия, выводы должны соответствовать уровню организованности системы
и степени ее детализации; вмешательство в систему должно согласовываться с
уровнем ее реакции на это вмешательство; информация и управляющие воз­
действия свертываются (укрупняются, обобщаются) при движении снизу вверх
по иерархическим уровням системы; предпочтение отдается требованиям при­
емлемым, реально достижимым, в противовес необоснованно высоким; сис­
темный подход нацелен на получение количественных характеристик, создание
методов, сужающих неоднозначность используемых понятий, определений,
оценок, вариантов.
Практическая реализация системного подхода должна учитывать много­
образие решаемых задач БРЛС в современных условиях и тенденции развития
средств радиоэлектронного подавления.
Для оценки помехозащищенности БРЛС используется система показате­
лей, которая содержит как частные, так и обобщенные показатели защищенно­
сти от непосредственной разведки и помехоустойчивости.
Защищенность от непосредственной разведки характеризуется зоной, в
пределах которой может быть обнаружено функционирование БРЛС с вероят­
ностью не выше заданной.
Используемые для оценки помехоустойчивости показатели, характери­
зующие качество решения БРЛС частных задач, относятся к частным показате-
лям. Обобщенные показатели являются численной мерой, характеризующей
способность БРЛС решать всю совокупность функциональных задач.
В качестве показателей эффективности БРЛС при функционировании
АК РЛДН в режиме радиолокационного поста могут применяться следующие
показатели:
вероятность выполнения требований потребителей к качеству радиолока­
ционной информации;
вероятность выполнения требований к качеству радиолокационной ин­
формации, заданных в тактико-техническом задании (ТТЗ);
вероятность радиолокационного обеспечения боевых действий огневых
средств, взаимодействующих с комплексом.
В качестве обобщенного показателя помехоустойчивости БРЛС исполь­
зуется коэффициент помехоустойчивости К п у , характеризующий сохранение
обобщенного показателя эффективности БРЛС, определенного как вероятность
обеспечения заданных в ТТЗ требований при функционировании в условиях
помех:
где W n , W0 - значения показателя эффективности БРЛС при наличии и отсут­
ствии помех соответственно.
При оценке помехоустойчивости по частным показателям применяют­
ся следующие показатели:
дальность обнаружения или сопровождения целей (в этом случае коэффи­
циент помехоустойчивости имеет смысл коэффициента сжатия зоны обнару­
жения или сопровождения);
математическое ожидание числа обнаруженных (проведенных) целей;
вероятность обнаружения (сопровождения) цели на заданной дальности;
ошибки измерения координат и параметров движения целей;
коэффициент проводки;
среднее время сопровождения воздушных целей;
коэффициент ложных трасс.
Степень помехоустойчивости определяется в результате сравнения рас­
считанного коэффициента помехоустойчивости с его заданным значением и
может быть представлена качественным показателем следующим образом. ,
Бортовая радиолокационная система считается помехоустойчивой, если в
прогнозируемых условиях функционирования рассчитанный показатель ее по­
мехоустойчивости ( К п у ) не снижается ниже заданного:
Для оценки помехоустойчивости БРЛС могут применяться экспертные,
экспериментальные и теоретические методы.
Экспертные методы применяются в тех случаях, когда нет времени на
создание адекватных и достоверных расчетных моделей, обеспечивающих вы­
работку обоснованных рекомендаций. Эти методы применяются для прогноза
на отдаленную перспективу, для ранжирования (установления степени пред­
почтительности) относительной важности показателей частных показателей
помехоустойчивости и т. п. Достоинствами экспертных методов являются
практически неограниченные сроки прогнозирования и сравнительная просто­
та, а также дешевизна получения результатов. Вместе с тем получаемые при их
помощи результаты являются достаточно субъективными, а качество этих ре­
зультатов весьма существенно зависит от квалификации экспертов. Примене­
ние данных методов в настоящее время ограничено.
К экспериментальным методам относятся лабораторные испытания, а
также испытания в реальных условиях работы. При испытаниях в реальных ус­
ловиях наиболее полно учитывается специфика исследуемых объектов. Однако
из-за ограниченности времени и затрат на проведение испытаний не удается
изучить все свойства исследуемого объекта в условиях воздействия на него
помех. Кроме того, большие трудности обычно возникают при воспроизведе­
нии реальных условий функционирования БРЛС АК РЛДН [19].
Одним из вариантов оценки помехоустойчивости является теоретическая
оценка помехоустойчивости БРЛС при функционировании в динамике кон­
фликта со средствами радиоэлектронного подавления. На современном уровне
развития методического аппарата основой для проведения теоретических ис­
следований по оценке помехоустойчивости БРЛС является имитационное мо­
делирование процесса ее функционирования в динамике конфликта с противо­
стоящими средствами радиоэлектронного подавления.
Потенциально помехозащищенность БРЛС, включая такие составляющие,
как скрытность и помехоустойчивость, может достигаться за счет применения
сигналов большой длительности с внутриимпульсной модуляцией при коэф­
фициенте сжатия 100 и более, длительного когерентного накопления пачки
сигналов (секунды и десятки секунд), многочастотного режима излучения и
приема, обеспечения неопределенности для противника характеристик РЛС в
процессе работы (несущей частоты, начальной фазы, вида модуляции, методов
обзора и т. п.) и их адаптивного изменения в зависимости от целевой и помеховой обстановки, применения многопозиционных режимов работы.
Особенности построения каналов разведки БРЛС АК РЛДН, направлен­
ные прежде всего на реализацию устойчивого обнаружения низколетящих ма­
лоразмерных целей на фоне мощных отражений от подстилающей поверхно­
сти, предопределяют их помехозащищенность как от организованных пассив­
ных так и от активных помех.
При исследовании влияния вариантов помеховой обстановки на функ­
ционирование БРЛС АК РЛДН в районах его ответственности при радиоэлект-
ронном подавлении необходимо учитывать следующие принципы применения
и функционирования средств постановки активных помех.
На АК РЛДН могут воздействовать станции активных помех (САП) груп­
повой и коллективной защиты. Станции активных помех индивидуальной за­
щиты применяются преимущественно для подавления других РЭС.
В соответствии с приоритетностью подавления радиоэлектронных средств
специализированными самолетами и вертолетами РЭБ, действующими из бое­
вых порядков ударных групп, а также стратегическими бомбардировщиками
(СБ), тактической авиацией (ТА) и вертолетами огневой поддержки, в первую
очередь будут подавляться БРЛС АК РЛДН, РЭС зенитных управляемых ракет
(ЗУР) и ракет «воздух-воздух», затем РЭС управления оружием, РЭС обнару­
жения и целеуказания, РЭС передачи команд, опознавания и связи.
Специализированными самолетами и вертолетами РЭБ, действующими из
зон барражирования, в первую очередь подавляются РЛС обнаружения и целе­
указания и РЭС, создающие наибольшую угрозу ударным группам.
Передатчик помех переводится в заградительный или скользящий режим в
следующих случаях:
подавления РЭС с перестройкой несущей частоты от импульса к импульсу;
наличия в пределах многолучевой диаграммы направленности антенны
одного передатчика, не менее 2-3 однотипных разнолитерных РЭС без элек­
тронной перестройки.
Заградительные помехи создаются в полосе частот ±(10...20)%, скользя­
щие - в полосе частот ±(1.. .25) % от частоты РЭС.
Хаотические импульсные помехи применяются с целью подавления
средств связи, командных линий передачи данных и средств опознавания, а
также усложнения радиоэлектронной обстановки по всему маршруту полета.
Высокопотенциальные станции помех применяются для подавления наи­
более важных РЭС группировки по боковым лепесткам ДНА и для срыва наве­
дения ЗУР и ракет «воздух-воздух» шумовыми и ответными (ретрансляцион­
ными) помехами соответственно. Они размещаются на борту специализиро­
ванных самолетов и вертолетов РЭБ, барражирующих вне зоны поражения
огневых средств ПВО, а также на наземных пунктах и кораблях.
По имеющимся данным обеспечивается следующая плотность создания
пассивных помех (пачек на 100 м пути):
для перевода РЭС в режим селекции движущихся целей (СДЦ) - 0,2...0,3
и 0,1.. .0,2 непрерывно с борта СБ, ТА и вертолетов соответственно;
для маскировки состава налета - 5... 10 на участке 20... 100 км с борта СБ,
беспилотного летающего аппарата и ТА соответственно;
для срыва атак ЗУР и ракет «воздух-воздух»: 2...3 непрерывно либо 7...10
с паузой 20.. .30 с с борта СБ и ТА.
Выбор самолетными станциями помех конкретного вида помеховых воз­
действий определяется складывающейся тактической и радиоэлектронной си­
туацией, а также техническими возможностями аппаратуры создания помех.
Наиболее вероятными видами помех, создаваемых современными само­
летными САП, являются
шумовые:
заградительные по частоте с полосой, равной диапазону перестройки час­
тоты БРЛС или 200.. .300 МГц для БРЛС без перестройки частоты;
прицельные по частоте с полосой, равной 2...4 ширины спектра подавляе­
мого сигнала;
ответные, типа «накрытый импульс», с длительностью импульса, равной
1,5...2 длительности импульса подавляемого сигнала;
мерцающие несинхронные и синхронные с частотой мерцания до 10 Гц;
прерывистые помехи с частотой коммутации 0,1... 10 Гц;
инверсные, формируемые путем излучения помех с уровнем, изменяемым
обратно пропорционально уровню принимаемого сигнала;
имитирующие:
уводящие по дальности;
уводящие по скорости;
уводящие по угловому направлению;
имитирующие пуск противолокационных ракет;
хаотические импульсные помехи;
многократные ответные;
комбинированные (шумовые в сочетании с уводящими).
В современных САП индивидуальной защиты заложена идеология при­
оритетного использования имитирующих помех. В режим создания шумовых
помех САП индивидуальной защиты переводятся в условиях сложной радио­
электронной обстановки с высокой плотностью потока сигналов, при подавле­
нии РЭС с поимпульсной нерегулярной перестройкой частоты или при подав­
лении нескольких разнолитерных РЭС, когда невозможно использование ре­
жима их последовательного обслуживания.
Применение хаотических импульсных помех САП индивидуальной защи­
ты против РЭС управления оружием является низкоприоритетным. Такие по­
мехи предназначены главным образом для РЭС радиосвязи, РЭС систем опо­
знавания «свой-чужой», для обзорных РЛС.
Станции активных помех индивидуальной защиты в первую очередь по­
давляются РЭС атакующих ракет, РЭС управления оружием, затем РЭС обна­
ружения и целеуказания. Приоритет однотипных РЭС определяется этапом их
работы: во всех случаях отдается предпочтение РЭС, уже выполняющим опе­
рации по ведению стрельбы или ее подготовке.
Специализированными постановщиками помех в первую очередь подав­
ляются РЛС обнаружения и целеуказания и РЭС, создающие наибольшую уг­
розу ударным группам ТА. При этом преимущественные виды помех - шумо­
вые маскирующие в непрерывном или импульсном режиме излучения. В слу­
чае доступности сигнала РЛС для средств радиотехнической разведки самолета
РЭБ для нее могут формироваться имитационные помехи - многократные или
хаотические импульсные.
Помехи самоприкрытия воздействуют на БРЛС в основном по главному
лучу ее ДНА, а помехи прикрытия - по боковым лепесткам ДНА.
В современных авиационных станциях помех предусмотрена возможность
распределения и регулирования излучаемой мощности помех в соответствии с
приоритетом угроз со стороны подавляемых РЭС. Регулирование мощности
излучаемой помехи наряду с высоким уровнем развязки приемных и передаю­
щих трактов создает возможность вести одновременную разведку нескольких
подавляемых РЭС бортовыми средствами РТР.
Постановка помех (шумовых и имитационных) с борта самолетов, изго­
товленных с использованием технологии «Стеле», может снизить уровень
демаскировки летательного аппарата и создать возможность получения ин­
формации о нем пассивными методами локации. Для защиты таких средств
воздушного нападения возрастает роль помех прикрытия с борта специализи­
рованных самолетов РЭБ, действующих из зон барражирования.
Функционирование БРЛС, как правило, происходит в условиях антаго­
нистического конфликта со средствами РЭП противоборствующей стороны
[4,5], которые осуществляют целенаправленное создание наиболее неблаго­
приятных условий как для работы отдельных информационных датчиков, так
и для системы в целом. Поэтому повышение эффективности применения
БРЛС за счет реализации соответствующего конфликтно-устойчивого управ­
ления функционированием системы, учитывающего динамику и целенаправ­
ленность изменения помеховой обстановки, является практически важным
исследованием.
Применение метода, предложенного в работах [3,5,8], для формирования
управления БРЛС в динамике конфликта со средствами РЭП ограничено тем,
что он не учитывает особенности и динамические свойства информационных
датчиков системы, специфику определяемых на этапе проектирования управ­
ляемых режимов функционирования и возможности идентификации парамет­
ров помеховой обстановки. В целом, практическое решение задачи выбора
многомерного управления БРЛС из множества альтернатив в динамике функ­
ционирования из-за катастрофически большой размерности пространства оп­
тимизируемых параметров и изменения их во времени может оказаться нереа­
лизуемым.
Для построения реализуемых алгоритмов конфликтно-устойчивого управ­
ления БРЛС предлагается подход, при котором вводится иерархия, соответст­
вующая принятым моделям двухсторонних действий, стратегий управления,
что позволяет разделить задачу синтеза многомерного управления на отдель­
ные составляющие.
Бортовая радиолокационная система (система Σχ ) содержит совокупность
информационных датчиков (ИД) D k , k = 1,...,N, каждый из которых может
функционировать в нескольких режимах:
Каждый режим ха­
рактеризуется набором непрерывных и дискретных параметров
Об­
работку информации от ИД и формирование результирующих сведений об об­
становке можно выполнять в нескольких режимах г™, т = 1,...,М0, каждый из
которых характеризуется значениями параметров
Поэтому значение
управления БРЛС представляется как выборка, состоящая из N +1 элементов:
где через Ux обозначено множе­
ство значений управлений БРЛС.
Управление функционированием БРЛС представляет собой функцию вида
, где Τ - интервал времени. Множество реализуемых управлений
РЭС обозначается через Rx . В процессе функционирования БРЛС при целена­
правленном выборе управления
происходит уточнение информации
о разведываемых объектах. Совокупность параметров, характеризующих в
каждый момент времени степень информированности БРЛС о разведывае­
мой обстановке, можно рассматривать как состояние БРЛС. Тогда множест­
во значений этих параметров можно рассматривать как пространство состояний: sx е Ω χ . В силу инерционности процесса добывания информации
изменение состояния БРЛС во времени подчиняется некоторому закону, ко­
торый может быть описан при помощи функции перехода состояний:
где под φ γ (·) имеется в виду совокуп­
ность параметров, характеризующих изменение внешних факторов, воздейст­
вующих на БРЛС, которые не зависят от управления БРЛС. Внешние условия
для БРЛС представлены параметрами обстановки, характеризующими свойства
разведываемых объектов (целей) и помеховую обстановку, создаваемую про­
тивостоящей стороной (система Σγ). Следует отметить, что на процесс форми­
рования информации об обстановке БРЛС влияет большое число случайных
факторов, не обязательно связанных с конфликтным характером условий
функционирования БРЛС; следовательно, состояния sx могут быть представ­
лены в терминах теории случайных процессов как элементы функционального
пространства, а функция перехода - в виде стохастического дифференциально­
го уравнения.
Аналогично параметры у п р а в л е н и я с и с т е м ы Σ γ содержат описа­
ние свойств передатчиков помех и параметров излучаемых помех, включая
пространственное распределение излучений. Помеховые воздействия uY могут
быть представлены в виде множества помех
и соответствующих
им множеств параметров помех
. В результате помеховое воздействие
представляется в виде
Управление функционированием системы Σγ представляет собой функцию
вида
, множество реализуемых управлений обозначается через R Y ,
а элементы пространства состояний
. Учитывая, что система Σ7 со­
держит подсистему разведки радиоэлектронной обстановки, под ее состоянием
можно понимать численную меру степени осведомленности о действиях БРЛС.
Изменение состояния системы РЭП может быть представлено функцией пере­
хода состояний
- совокуп­
ность параметров, характеризующих изменение внешних факторов, воздейст­
вующих на систему РЭП. Множества Ux , UY определяют энергетические ог­
раничения, a R x , RY - динамические ограничения на управления этих систем.
Динамика изменения обстановки задается в виде функции v(t), а изменение
состояния можно представить переходной функцией
Схема конфликта БРЛС и системы радиоэлектронного подавления помех пока­
зана на рис. 4.1. Множества стратегий управления БРЛС и системы РЭП, кото­
рые определены в [5], обозначим через
соответственно.
Обобщенный показатель эффективности функционирования БРЛС
АК РЛДН определяется как степень его способности выполнять решаемые за­
дачи по обеспечению потребителей информацией [7] и может быть численно
представлен как вероятность обеспечения потребителей информацией требуе­
мого им качества. Разведываемая обстановка V содержит объекты v l9 ..., vL ,
информация о которых требуется потребителям в соответствии с решаемыми
задачами Ζ. Каждый из этих объектов обладает рядом демаскирующих при­
знаков, доступных для наблюдения отдельными ИД.
Характеристики информативности об объекте Vj определяются соответст­
вующим частным показателем, значения которого зависят от режима работы
ИД, параметров этого режима и воздействующих на него помех:
Значения этого частного показателя характеризуют
также и степень подверженности ИД воздействию помех. В результате каждому
моменту времени может быть поставлен в соответствие набор частных показате­
лей информативности БРЛС о разведываемых объектах:
Ре­
зультирующая информация об обстановке формируется на основании данных,
полученных всеми ИД. В зависимости от режима обработки информации, по­
лученной от разнотипных ИД, обобщенный показатель эффективности функ­
ционирования БРЛС является функционалом
Рис. 4.1
На всем интервале времени функционирования эффективность РЭС опре­
деляется интегральным показателем
, который отражает
способность БРЛС решать задачи информационного обеспечения потребителей
в течение заданного интервала времени.
Поскольку критерии выбора стратегий управления сторонами, участвующи­
ми в конфликте, прямо противоположны, отношение предпочтения G cz Ξχ χ Ξχ в
задаче выбора стратегии управления с точки зрения стороны χ может быть за­
дано следующим условием:
Тогда выбор оптимальной стратегии управления для БРЛС осуществляет­
ся путем решения задачи выбора:
где
- отношение предпочтения, сформированное при оптимальных стра­
тегиях управления системой РЭП.
Применение принципов управления БРЛС, которые отражают наиболее
общие свойства оптимальных стратегий получения конечной цели, направлено
на снижение размерности приведенной задачи выбора. Эти принципы могут
быть выражены в терминах частных отношений предпочтения в виде
Из рис. 4.1 следует, что БРЛС может быть представлена как иерархическая
система, содержащая два уровня, что позволяет осуществить декомпозицию
управления системой по различным иерархическим уровням. Тогда, может быть
установлен принцип иерархической организации оптимального управления (GXi)
[11], который состоит в том, что выбор управления РЭС осуществляется в пред­
положении, что стратегии управления информационных датчиков оптимальны:
Выбор управлений каждой из сторон выполняется в динамике функцио­
нирования по информации о складывающихся условиях и действиях противо­
стоящей стороны, т. е. с использованием оперативной идентификации процес­
сов по проводимым измерениям. Изменение параметров помехового воздейст­
вия с течением времени приводит к неадекватности выбранного принципа
оптимальности и к выбору режима функционирования БРЛС в соответствии с
данным принципом оптимальности. Для выполнения этого условия могут при­
меняться следующие принципы.
Принцип адаптивно-управляемого функционирования БРЛС (стратегия
Gx2) Суть данного принципа состоит в том, что задача выбора стратегии управ­
ления σχ в динамике функционирования БРЛС осуществляется при изменяю­
щемся во времени отношении предпочтения G(t), которое зависит от прогнози­
руемой точности идентификации помеховой обстановки.
Поскольку для получения результатов наблюдения каждый из режимов
работы БРЛС занимает определенное время, изменение параметров и режимов
управления должно быть согласовано с переходными процессами при добыва­
нии информации о целевой и помеховой обстановке, должен соблюдаться
принцип согласованности динамичности управления БРЛС с изменением пара­
метров помеховой обстановки ( G X3 ).
Принцип динамического прогноза изменения параметров помеховой об­
становки (стратегия GX4). Суть данного принципа в том, что осуществляет­
ся экстраполяция параметров помеховой обстановки на интервал времени,
превышающий длительность переходных процессов в БРЛС:
где FY - функция прогноза, построенная на основе восстановленной модели
действий противостоящей стороны. В результате, выбор управления БРЛС
осуществляется путем решения задачи выбора значения их для прогнозируе­
мого интервала времени At.
С учетом целенаправленности создания помеховой обстановки противо­
стоящей стороной и наличия неопределенности относительно режима функ­
ционирования БРЛС выбор значений у осуществляется на основании отноше­
ния предпочтения
с использованием модели функционирования
БРЛС при неопределенности относительно значения φ χ ( · ) . Следовательно,
выбор таких режимов работы БРЛС, при которых выполняется принцип
скрытности функционирования БРЛС (Gxs), позволяет снизить возможности
системы РЭП по созданию адекватной помеховой обстановки, минимизирую­
щей эффективность функционирования БРЛС.
Кроме того, предполагая, что система РЭП выполняет также прогноз со­
стояния БРЛС, используя для этого модель поведения Fx (·), эффект неопреде­
ленности о состоянии БРЛС можно усилить путем применения принципа де­
зинформации (стратегия Gxe).
В связи с тем, что ИД имеют различные пространства наблюдаемых пара­
метров, при формировании управления необходимо соблюдать принцип управ­
ляемого комплексирования и совместной обработки информации от разнотип­
ных информационных датчиков БРЛС (стратегия G X7 ), который предполагает
сужение множества Ux только на те совокупности ИД, которые обеспечивают
потребителям требуемый состав информации об обстановке.
Также возможно применение принципа динамической автокомпенсации
воздействий помех (стратегия G X8 ), суть которого состоит в применении мер
защиты от возможных видов помех.
Предложенные основные принципы управления БРЛС в условиях целена­
правленного изменения параметров помеховой обстановки позволяют снизить
размерность задачи выбора оптимальной стратегии управления БРЛС и повы­
сить разведывательно-информационные возможности АК РЛДН.
4.2. Предложения по технической реализации
заданного уровня помехозащищенности бортовой
радиолокационной системы
Результатом воздействия активных и пассивных помех на БРЛС является
снижение дальностей обнаружения, точностей определения координат целей,
сопровождение ложных целей и т. д.
Для уменьшения влияния радиолокационных помех на БРЛС необходимо
использовать различные технические способы и устройства [14, 18]:
фильтры помех;
устройства бланкирования приемника;
угловую селекцию;
дискриминаторы частоты повторения импульсов;
дискриминаторы длительности импульсов;
перестройку частоты БРЛС по диапазону излучения;
уменьшение ширины основного луча диаграммы направленности;
уменьшение уровня боковых лепестков;
компенсацию помех по боковым лепесткам;
формирование провалов ДН в направлении на постановщик помех и т. д.
Действенной мерой обеспечения заданного уровня помехозащищенности
является использование адаптивного автокомпенсатора помех (АКП), реали­
зующего принципы динамической автокомпенсации маскирующих активношумовых помех.
Работа АКП основана на использовании дополнительного приемного кана­
ла, выделяющего помеху из смеси с полезным сигналом. Принятая по дополни­
тельному каналу помеха вычитается из совокупности полезного сигнала и поме­
хи, действующей на входе основного канала. Для приема помех, действующих
по боковым лепесткам ДН, дополнительный приемный канал содержит специ­
альную ненаправленную компенсационную антенну с малым коэффициентом
направленного действия (КПД). Коэффициент усиления компенсационной ан­
тенны должен соответствовать (быть не менее) уровню наибольшего из боко­
вых лепестков антенны основного канала. На выход вычитающего устройства
проходят сигналы только в том случае, если сигналы основного канала больше
сигналов компенсационного канала.
Структурная схема, поясняющая работу АКП, приведена на рис. 4.2, где s полезный сигнал, отраженный от цели; χ - помеха, поступающая от источника
помех на основной приемный канал; Χι - помеха, поступающая от источника
помех на дополнительный приемный канал; у - выходной сигнал компенсаци­
онного фильтра (КФ), е - выходной сигнал компенсатора и одновременно те­
кущая погрешность адаптации.
Пусть s, χ, х ь у стационарны, сигнал s не коррелирован с помехами χ и хь
а х и Χι взаимно коррелированы.
Из рис. 4.2 видно, что
Следовательно,
·>
где Е[·] означает математическое ожидание величины, заключенной в квадрат­
ные скобки.
чв
Рис. 4.2
Величина E[s ] представляет собой среднюю мощность сигнала. Если
то
(4.1)
т. е. минимизация полной входной мощности
соответствует полной ком­
пенсации помехи на выходе компенсатора или максимальному отношению
сигнал/помеха.
Соотношение (4.1) является критерием компенсации по минимуму средне­
го квадрата ошибки (СКО).
Для эффективной компенсации помехи необходимо обеспечить весьма
точное соответствие помех в основном и дополнительном каналах. Это требо­
вание можно выполнить, введя корреляционную обратную связь (КОС), кото­
рая позволяет уточнить коэффициент усиления дополнительного канала рав­
ным коэффициенту усиления основного канала, что и необходимо для компен­
сации помехи.
Подключение компенсационного канала проводится автоматически при
появлении корреляции помех между основным и дополнительным каналами,
т. е. при появлении внешних источников помех. При отсутствии помехи до­
полнительный канал заперт (коэффициент усиления дополнительного канала
равен нулю) и на выход поступает сигнал только основного канала.
Если кроме равенства амплитуд в основном и дополнительном каналах
обеспечить и равенство фаз, то помеху можно скомпенсировать не только по­
сле детектора, но и на высокой (промежуточной) частоте. Соответственно раз­
личают некогерентный и когерентный методы компенсации. Линейность ко­
герентных автокомпенсаторов за счет увеличения числа независимых по пара­
метру селекции дополнительных каналов позволяет компенсировать помехи,
создаваемые одновременно несколькими источниками.
Одна из практических схем двухканального автокомпенсатора приведена
на рис. 4.3.
Рис. 4.3
Здесь компенсационный канал разделяется на две параллельные ветви, в
каждой из которых имеются управляемые усилители (УУ). Через первую ветвь
проходит непосредственно сигнал, принятый компенсационной антенной, че­
рез вторую - тот же сигнал с поворотом фазы на 90°. Регулировка усиления в
каналах позволяет управлять амплитудой и фазой суммарного сигнала.
За счет цепей обратной связи помеховые колебания, принятые компенса­
ционным каналом, автоматически становятся равными по амплитуде и проти­
воположными по фазе с колебанием основного канала. Происходит компенса­
ция помех. Этот вариант получил название автокомпенсатора с квадратур­
ными каналами. При необходимости число компенсационных каналов может
быть увеличено. Здесь в обоих каналах используются супергетеродинные при-
емники. В основном канале гетеродинное напряжение подается от независи­
мого генератора. Во вспомогательном канале амплитуда и фаза гетеродинного
напряжения регулируются за счет обратной связи таким образом, чтобы помеховые колебания были также противофазными и равными по амплитуде с по­
мехой основного канала. Число компенсационных каналов также может быть
увеличено.
Схема гетеродинного автокомпенсатора приведена на рис. 4.4.
иг
Р и с . 4.4
Поскольку АКП представляет собой эффективное средство повышения
помехозащищенности РЭС, то его внедрение в БРЛС АК РЛДН является необ­
ходимым.
Применяемые в современных отечественных БРЛС системы компенсации
помех имеют ряд существенных недостатков, связанных с отсутствием управ­
ления диаграммами направленности опорных (компенсационных) антенных
раскрывов этих каналов. Малоканальность систем АКП предопределяет фор­
мирование более широких компенсационных ДН для прикрытия довольно зна­
чительных секторов эффективного подавления БРЛС в условиях массирован­
ного налета СВН. Эти ДН, как правило, жестко фиксированы относительно
главного луча ДН основного антенного раскрыва и в недостаточной степени
перекрывают область эффективного подавления или отдельные направления.
Для того чтобы сформировать конфликтно-устойчивое управление БРЛС,
необходимо конкретизировать структуру системы, а также определить реали­
зуемые механизмы управления и зависимость показателей информативности
системы в условиях воздействия активных помех. Практические предложения
по организации конфликтно-устойчивого управления для БРЛС в интересах
разведки воздушных объектов в динамике конфликта со средствами радиоэлек­
тронного подавления заключаются в следующем.
Процесс получения информации о реальной обстановке, осуществляемый
с применением принципов конфликтно-устойчивого управления в динамике
конфликта со средствами радиоэлектронного подавления, содержит модель це­
левой и помеховой обстановки, модель наблюдения, представляющую собой
отображение модели обстановки в пространство наблюдаемых параметров и
алгоритм принятия решения о параметрах обстановки на основании информа­
ции, полученной от информационных датчиков (рис. 4.5).
Рис. 4.5
Отсутствие управления процессами обработки информации в БРЛС при­
водит к тому, что структура подсистемы обработки оптимизируется по крите­
рию максимальной эффективности решения задач. В то же время противобор­
ствующая сторона осуществляет оценку режимов функционирования БРЛС и
оптимизирует способы создания помех по критерию минимизации его разве­
дывательно-информационных возможностей.
Для обеспечния конфликтно-устойчивого управления БРЛС в дополнение
к подсистеме цифровой обработки информации необходима реализация соот­
ветствующей подсистемы управления (рис. 4.5). Последняя выполняет функ­
ции по идентификации условий обстановки, апостериорной оценке качества
функционирования БРЛС и динамического управления вариантами обработки
на основе статистических решений о моделях складывающейся обстановки [9].
Учитывая сложившуюся структуру процессов цифровой обработки
информации, можно представить структуру обработки информации в БРЛС в
виде иерархической трехуровневой системы (рис. 4.6). Укрупненная блоксхема реализации конфликтно-устойчивого управления в БРЛС в интересах
повышения помехозащищенности может быть представлена в виде, показан­
ном на рис. 4.7.
Использование конфликтно-устойчивых алгоритмов управления процес­
сами добывания и обработки информации в БРЛС приводит к тому, что режи­
мы функционирования и обработки информации оптимизируются таким обра­
зом, чтобы, с одной стороны, обеспечить максимальное качество решения по­
ставленных задач в условиях воздействия различных типов помех, а с другой
стороны, снизить возможности противоборствующей стороны по разведке
функционирования системы.
Рис. 4.6
Авиационные комплексы радиолокационного дозора и наведения
Рис. 4.7
4.3. Помехоустойчивые алгоритмы вторичной обработки
информации в БРЛС при автоматическом сопровождении
целей в режиме обзора
Автоматическое сопровождение целей в режиме обзора [15] - один из ос­
новных режимов функционирования современных и перспективных БРЛС.
Этот режим позволяет непрерывно получать информацию обо всех целях в зо­
не ответственности и выявлять наиболее опасные и важные из них.
Одновременно с развитием техники радиолокации совершенствуются
средства РЭБ, создаются новые виды помех, интенсивно наращиваются воз­
можности по радиоэлектронному подавлению всех режимов работы БРЛС, в
том числе и АСЦРО. Поэтому обеспечение надежного функционирования
БРЛС в процессе автоматического сопровождения целей при обзоре простран­
ства в условиях воздействия помех различного происхождения - одна из слож­
нейших задач. Сложность обусловлена резким увеличением количества ин­
формации, поступающей на вход системы сопровождения целей, что затрудня­
ет выполнение процедур идентификации и сопровождения целей и может
привести к снижению точности оценивания их фазовых координат, возраста­
нию вероятностей перепутывания сопровождаемых траекторий, появлению
ложных траекторий и т. д.
Автоматическое сопровождение целей в режиме обзора, реализуемое в
процессе совместного функционирования БРЛС и цифровой вычислительной
системы, выполняется в несколько этапов, содержащих формирование первич­
ных измерений, завязку траекторий, экстраполяцию относительных фазовых
координат (траекторий) всех сопровождаемых целей в промежутках между по­
ступлениями от БРЛС результатов измерений, идентификацию поступающих
отметок на их принадлежность тем или иным экстраполируемым траекториям,
фильтрацию экстраполированных фазовых траекторий по результатам иденти­
фицированных измерений, ранжирование целей по степени их важности, сброс
сопровождаемых траекторий.
При автоматическом сопровождении целей в режиме обзора для подавле­
ния БРЛС наиболее вероятно использование следующих помех: непрерывных
шумовых; многократных синхронных импульсных; имитирующих импульс­
ных; комбинированных имитирующих и маскирующих; активно-пассивных.
Возможно применение одноточечных совмещенных с целью помех и простран­
ственно разнесенных (многоточечных) помех. Роль последних в настоящее
время существенно возрастает. В результате действия помех в БРЛС затрудня­
ется процесс привязки отметок к траекториям, возможны захват ложных траек­
торий и их сопровождение, срыв сопровождения истинных траекторий и пере­
грузка вычислительной системы.
Сопровождение целей в условиях помех - одна из сложнейших про­
блем автоматизации процессов вторичной обработки радиолокационной ин­
формации. Для ее решения разработано достаточно большое число различных
алгоритмов. Одним из таких помехоустойчивых алгоритмов вторичной обра­
ботки, наиболее пригодным для практики, является модифицированный алго­
ритм совместной вероятностной идентификации данных (JPDAM) [14].
Этот алгоритм предназначен для сопровождения близко расположенных це­
лей и целей, траектории которых могут пересекаться. При его реализации вы­
полняются следующие основные операции: экстраполяция вектора состояния
траектории цели, вычисление усредненной невязки, коррекция оценки векто­
ра состояния.
Применение алгоритма JPDAM позволяет эффективно решать задачу со­
провождения целей в режиме АСЦРО при воздействии уводящих помех, а так­
же маскирующих помех, вызывающих появление ложных отметок. Однако не­
достатком данного алгоритма является потребность в больших вычислитель­
ных возможностях аппаратуры.
Классификация условий обстановки на уровне совместной обработки ин­
формации от разнотипных информационных датчиков БРЛС включает выделение
областей зоны ответственности, для которых характерны устойчивые особен­
ности воздушной и помеховой обстановки (рис. 4.8). Указанные особенности
характеризуются наличием как одиночных, так и групповых целей, влиянием
различных типов и параметров помех в различных секторах наблюдения.
Рис. 4.8
Конфликтно-устойчивое управление ресурсами разведки и защиты от по­
мех БРЛС должно содержать оценку пространственного положения постанов­
щиков помех, видов и параметров помех и выбор наиболее эффективных в
складывающейся помеховой обстановке способов поиска и обнаружения объ­
ектов. При выборе вариантов обработки информации в БРЛС необходимо про­
водить не только оценку целевой обстановки, но и детальную оценку помехо­
вой обстановки. Поэтому часть поискового ресурса БРЛС должна быть направ­
лена на оценку помеховой обстановки.
При оценке помеховой обстановки важными параметрами для оптимиза­
ции процесса поиска и сопровождения целей являются следующие:
местоположение постановщиков помех;
виды создаваемых помех;
чувствительность приемника исполнительной радиотехнической разведки
постановщика помех;
мощность создаваемых помех.
На основании оценок указанных параметров появляется возможность про­
гнозирования уровня и видов создаваемых помех при применении тех или иных
способов добывания информации и последующего выбора оптимальных из них.
Вследствие иерархической структуры БРЛС АК РЛДН термин «режим ра­
боты» может применяться к различным иерархическим уровням и к подсистемам этих уровней. В частности, основным приемом при активной радиолока­
ции является зондирование обследуемого пространства, под которым подразу­
меваются излучение зондирующего сигнала, прием и обнаружение ответных
сигналов. Способы зондирования различаются параметрами излучаемых сиг­
налов, распределением излучаемой мощности по пространству и алгоритмом
обработки сигналов. Для решения задач поиска объектов и кх сопровождения в
зависимости от типов объектов и условий, в которых эти задачи решаются,
наиболее эффективными являются различные способы зондирования. Если
способ зондирования не изменяется в течение некоторого времени, например
БРЛС выполняет только задачу поиска наземных объектов, то имеют место оп­
ределенные закономерности в последовательности излучаемых сигналов, харак­
терные для решения конкретной задачи. При наличии таких закономерностей
могут использоваться термины «режим излучения», «режим зондирования»
или «режим работы БРЛС». Таким образом, под режимом функционирования
БРЛС в дальнейшем будем понимать установленный порядок излучения и об­
работки сигналов.
Управление - это обеспечение функциональной зависимости от времени
значений управляемых параметров (т. е. тех параметров, которые доступны для
подсистемы принятия решений). Если понятие «управление» распространяется
на объект, то имеется в виду управление этим объектом. Кроме того, под
управлением может подразумеваться сам процесс принятия решений, заклю­
чающийся в последовательном выборе значений управляемых параметров в
динамике функционирования объекта. Такое расширение понятия управления
вполне уместно, но при этом теряется однозначность его трактовки.
Поиск и обнаружение включают обзор области ответственности и приня­
тие решения о наличии или отсутствии в элементах разрешения разведываемых
объектов. Частным показателем, характеризующим качество решения данной
задачи, является время обнаружения реально существующего объекта в зоне
ответственности, отсчитываемое от момента его появления. Требования к
этому показателю должны быть заданы в виде функции на множестве наблю­
даемых параметров, возрастающей по мере увеличения расстояния от области
ответственности и отражающей степень опасности появления целей в различ­
ных областях зоны ответственности. Данная задача может быть представлена в
виде последовательности задач обнаружения целей в элементах разрешения и
принятия решения о наличии целей. Вторая задача может решаться как по ре­
зультатам накопления информации в течение нескольких обзоров, так и путем
поиска в ограниченной области пространства. Форма реализации может зави­
сеть от требований к частному показателю.
Ограничение в скорости изменения управляемых параметров определяется
инерционностью процессов при перестройке ФАР. В современных ФАР мак­
симальная частота перестройки составляет 200 Гц (5 мс), что соответствует
дальности 750 км. Таким образом, при описании процесса управления ФАР
можно использовать в качестве единицы измерения рабочий такт, минимальная
величина которого равна длительности интервала времени, необходимого для
выполнения одной элементарной операции. В принципе величина рабочего
такта может быть изменяемой, но не меньше минимально возможной.
В течение рабочего такта ФАР занята выполнением элементарной опера­
ции, направленной на решение одной, из частных задач БРЛС. В числе решае­
мых БРЛС задач в условиях воздействия активных помех необходимо реализо­
вать следующие:
анализ помеховой обстановки и конфликтно-устойчивое управление ком­
плексом с учетом измеренных параметров помех;
обзор (просмотр зоны обзора) при обнаружении воздушных (наземных,
надводных) целей;
непрерывное сопровождение отдельной цели (дискретное сопровождение);
разрешение целей в группе;
распознавание типов целей;
поиск цели в ограниченном объеме пространства;
картографирование или обзор земной (морской) поверхности (при помощи
обычного луча, с доплеровским обострением луча, с синтезированием аперту­
ры), селекцию движущихся целей;
поиск и обнаружение ориентиров.
При решении одной из указанных задач используются специфические для
них виды сигналов, параметры этих сигналов, способы распределения излу­
чаемой энергии по пространству и алгоритмы пространственно-временной об-
работки сигналов. В связи с указанной особенностью выделяют режимы рабо­
ты БРЛС, соответствующие решаемым ею задачам. При решении одновре­
менно нескольких задач считается, что БРЛС работает в нескольких режимах
одновременно. Такое упрощенное представление о процессе функционирова­
ния системы отражает только внешнюю сторону и не позволяет перейти к де­
тализации ее описания в динамике. Поэтому режим функционирования
АК РЛДН молено определить как установленный порядок применения раз­
личных способов добывания и обработки информации. Основным режимом
функционирования АК РЛДН при ведении разведки следует считать такой
порядок применения способов добывания и обработки информации, который
является оптимальным для наиболее общих или наиболее вероятных условий
обстановки.
Вполне вероятно, что ресурсы ФАР могут быть разделены таким образом,
что одновременно будет выполнено несколько различных задач. В этом случае
произойдет разделение не по времени, а по энергетике.
Зависимость состава решаемых частных задач от времени можно предста­
вить в виде вектора z(t)-iz 1 (t),...,z N (t)), компоненты которого принимают
значения ноль, если в момент времени t соответствующая задача (работа, вид
работы) не выполняется, и единица - в противном случае. Состав решаемых
задач не может быть определен с учетом текущей обстановки, а должен фор­
мироваться на основе требуемого качества отображения разведываемой обста­
новки. В том случае, когда одновременно на некотором интервале времени ре­
шается более одной задачи, временной и энергетический ресурсы должны быть
распределены между этими задачами. Выбор возможного способа распределе­
ния ресурсов ограничивается возможностями ФАР и определяется путем опти­
мизации по критерию достижения некоторой цели функционирования в тече­
ние определенного интервала времени.
Принятие решения о распределении поисковых ресурсов принимается на
основании оценки возможностей АК РЛДН по ведению разведки в текущих ус­
ловиях помехово-целевой обстановки.
Управление в реальном масштабе времени по большому числу изменяе­
мых параметров сводится к целенаправленному «включению» соответствую­
щих условиям применения вариантов функционирования (цифровой обработки
Ρ ЛИ). Изменение требований к информации в динамике конфликта задает из­
меняющуюся цель функционирования АК РЛДН, что приводит к необходимо­
сти коррекции управления даже при стационарных (сложившихся) условиях
обстановки.
Реализация принципа иерархической организации оптимального управле­
ния на вышестоящей иерархической ступени обработки информации заключа­
ется в выборе таких способов, которые в текущих условиях являются опти-
мальными, а на нижестоящей иерархической ступени - в детализации условий
и подборке по ним оптимальных параметров для соответствующего уровня.
Активное поисковое усилие заключается в излучении определенного вида
сигнала заданной мощности в направлении на постановщик помех и анализе
реакции в виде ответных излучений с целью установления порога обнаружения
станцией РТР и способа реакции постановщика помех на данный вид сигнала.
Прием и анализ создаваемых ответных помех может осуществляться как при­
емным устройством БРЛС с ФАР, так и станцией РТР, входящей в состав
АК РЛДН. Пассивное поисковое усилие состоит в разведке излучений, посту­
пающих с направлений, на которых могут находиться постановщики помех, без
излучения зондирующих сигналов. Разведка излучений может выполняться в
заданной области пространства при помощи РЛС или совместно со станцией
РТР. Применение станции РТР позволяет освободить поисковый ресурс БРЛС.
Для повышения качества разведки станции РТР могут выдаваться целеуказания
по частоте и угловому направлению.
При анализе помеховой обстановки выделяются следующие ситуации:
постановка помех (ПП) индивидуальной защиты;
постановка помех групповой (коллективной защиты) из боевых порядков
(в этом случае ПП впереди группы самолетов);
постановка помех из зон барражирования.
Для каждой ситуации выполняются определенные закономерности в по­
становке помех и вырабатываются соответствующие им способы борьбы с по­
мехами, основанные на более детальном анализе имеющихся сведений о воз­
душной обстановке, видах и параметрах излучаемых помех и закономерностей
в постановке этих помех.
При анализе помеховой обстановки также должна отслеживаться законо­
мерность между излучением сигнала в определенных направлениях и ответной
реакцией противника, выраженной в постановке ответных активных помех, а
также временем реакции и степенью адекватности создаваемых помех. Такой
анализ совместно с имеющейся информацией о целевой обстановке позволит
определить местоположение средств радиотехнической разведки противника,
разнесенных в пространстве со средствами постановки помех.
Для обеспечения возможности принятия решений о выборе той или иной
структуры обработки информации на этапе проектирования обосновывается
минимально достаточное, но эффективное в диапазоне прогнозируемых усло­
вий применения множество режимов функционирования АК РЛДН, содержа­
щее совокупность вариантов добывания и обработки информации, относящих­
ся к различным иерархическим уровням построения системы обработки ин­
формации. При этом неэффективными считаются такие алгоритмы, которые не
являются предпочтительными по отношению к другим при любых условиях и
по любым показателям. Например, сравнение алгоритмов оценивания парамет-
ров траекторий, основанных на калмановской фильтрации и а-, β-фильтрации
показывает, что при решении разных задач и различных условиях обстановки
каждый из них может иметь преимущества перед другим. Если первый из этих
алгоритмов существенно точнее в стационарных условиях обстановки, то вто­
рой алгоритм значительно устойчивее при нестационарных флуктуациях траек­
тории движения сопровождаемого объекта.
В соответствии с иерархической структурой системы обработки информа­
ции в АК РЛДН при проектировании БРЛС могут быть определены следующие
альтернативные варианты функционирования.
Способы зондирования пространства:
использование различающихся видов зондирующих сигналов (сложные:
ФКМ, ЛЧМ и др., простые импульсы, пачки импульсов и др.) с различной час­
тотой повторения импульсов, изменением частоты повторения импульсов, из­
менением вида сигнала или несущей частоты от импульса к импульсу, измене­
нием параметров зондирующих сигналов (мощность или длительность);
использование различных способов обзора пространства (с узкой или ши­
рокой диаграммой направленности) и способов поиска целей в зоне ответст­
венности (последовательный, случайный, управляемый и др.).
Способы определения координат объектов:
угломерно-дальномерный;
разностно-дальномерный;
суммарно-дальномерный;
угломерно-разностно-дальномерный (в зависимости от возможного соста­
ва информационных датчиков).
На этапе траекторной обработки информации при обнаружении целей
должны использоваться алгоритмы с управляемыми критериями принятия
решений об обнаружении траекторий и сбросе с сопровождения; при оценке
параметров траекторий должны использоваться алгоритмы устойчивой
фильтрации с управляемой памятью (для стабилизации ошибок при флуктуа­
циях траекторий целей) и возможностью применения разнотипных измерений
(координатные отметки, пеленги, разности дальностей, суммы дальностей) для
оценивания текущих параметров траекторий; при сопровождении траекторий
должны использоваться алгоритмы сопровождения одиночных целей (с раз­
личными гипотезами о характере флуктуации их траектории), групповых (для
различных условий плотностей целей в группе, размеров групп и их численно­
го состава), маневрирующих целей (различающихся интенсивностью и видом
маневра), алгоритмы сопровождения в условиях интенсивного потока ложных
отметок.
На этапе совместной обработки информации должны применяться алго­
ритмы совместной обработки разнотипных измерений в зависимости от со­
става информационных датчиков: алгоритмы, основанные на методах триангу-
ляции или самотриангуляции, предполагающие использование информации
оповещения от взаимодействующих источников информации; алгоритмы объе­
динения и отождествления разнотипной информации от различных источни­
ков; алгоритмы распознавания целей по разнотипной информации и определе­
ния боевого порядка групп целей.
Общая схема организации управления в АК РЛДН в условиях РЭП осно­
вана на введении обобщенного показателя эффективности для каждого из ие­
рархических уровней обработки информации. Выбор способа функционирова­
ния БРЛС осуществляется по критерию максимизации этого показателя в иден­
тифицируемых условиях обстановки.
Обобщенный показатель эффективности, представленный в виде вероят­
ности обеспечения требований потребителей к качеству информации, зависит
от ряда свойств частных характеристик выдаваемой информации. Указанные
свойства проявляются в виде совместного закона распределения частных ха­
рактеристик. Наличие разнородных потребителей учитывается следующим об­
разом.
Каждый потребитель предъявляет требования к информации по опреде­
ленному составу характеристик. Следовательно, для каждого потребителя оп­
ределено нечеткое множество требований в специфичном для данного потре­
бителя пространстве характеристик: Ω£ρ a Qk . Характеристика информации
представляет собой числовую функцию, заданную на пространстве оценок об­
становки, т.е. это функция от выданной в течение функционирования БРЛС
АК РЛДН информации данному потребителю. В связи со случайным характе­
ром оценки обстановки характеристики информации также являются случай­
ными величинами. Совместный закон их распределения может быть представ­
лен многомерной функцией плотности распределения вероятностей f(%). Тогда
обобщенный показатель можно определить следующим выражением:
Учитывая, что события
статистически зависимы, используя
формулу полных вероятностей, можно получить выражение для W через инте­
гралы от функции ί(χ)πο нечетким множествам.
Закон распределения характеристик информации ί(χ) зависит от ряда фак­
торов, обусловленных как действиями противостоящей стороны, так и дейст­
виями АК РЛДН по добыванию информации в условиях радиоэлектронного
подавления.
Особенность обобщенного показателя качества состоит в том, что он мо­
жет быть оценен только путем сравнения реальной обстановки и оценки обста­
новки, выдаваемой АК РЛДН. Сведения о реальной обстановке не могут быть
доступны как для данного комплекса, так и для его надсистемы в течение вре­
мени функционирования, что приводит к необходимости оценки данного пока­
зателя с учетом априорных свойств используемых алгоритмов обработки ин­
формации и текущей оценки обстановки.
В указанных условиях для оценки состояния информационной подсисте­
мы АК РЛДН и выработки управляющих воздействий используется иерархиче­
ская система частных показателей, отражающих качество отдельных этапов
обработки информации и качество решения отдельных задач разведки обста­
новки.
Частные характеристики качества информации, выдаваемой комплек­
сом РЛДН, с учетом решаемых им задач можно описать вектором характери­
стик
, однозначно определяющим эффективность обеспе­
чения потребителей информации:
где
- вектор пространственно-временных характе­
ристик формируемых зон информации ι
- реализуемые конфигу­
рации областей соответственно постоянного, периодического контроля, АТС продолжительность существования формируемой зоны информации относи­
тельно «текущего» времени);
- вектор точност­
ных характеристик выдаваемой траекторной информации
- погреш­
ности оценки соответственно плоскостных координат и высоты, σΨ - погреш­
ности оценки курса движущихся объектов );
-
вектор характеристик полноты информации ( N^aKC^ - максимальное число со­
провождаемых целей,
- относительная продолжительность непрерывного
сопровождения целей, ΔΤΡ - относительная продолжительность разрывов
трасс);
- вектор характеристик достоверно­
сти выходного информационного процесса
- коэффициенты
ложных трасс соответственно по числу и относительному времени сопровожде­
ния,
- относительное время существования ложных трасс).
Для АК РЛДН в зависимости от решаемых задач, динамики изменения
требований к информативности, типа взаимодействующего с ним потребителя
состав учитываемых значимых характеристик в векторах
может быть различным.
Анализ коррелированности учитываемых характеристик информативности
БРЛС АК РЛДН, проведенный на основе имитационного моделирования аль­
тернативных вариантов цифровой обработки Ρ ЛИ, показал [9], что при исполь­
зовании различных механизмов управления объективно наблюдается эффект
улучшения значений одних групп показателей и ухудшение других. Это не по­
зволяет обеспечить расчленение управляемого процесса формирования ВИП,
изолированное управление по каждому из вышеназванных показателей Vx и
как следствие максимальный эффект от применения комплекса РЛДН в изме­
няющихся условиях целевой и помеховой обстановки.
При исходной многокритериальности решаемой задачи для конструирова­
ния конфликтно-устойчивого критерия выбора альтернатив используем обоб­
щенный показатель информативности - вероятность того, что представитель­
ное множество характеристик информативности комплекса будет гарантирован­
но находиться в заданной надсистемой многомерной области значений. Это
позволит «обеспечить» для разделяемых во времени требований к информа­
тивности комплекса, определяемых текущими решаемыми им задачами на вы­
деляемых неравнодискретных временных интервалах (ΔΤ Φ const), обеспечить
«включение» и однозначный выбор эффективных вариантов цифровой обра­
ботки РЛИ. Тогда, используя известный адаптивный подход для дискретно
фиксируемых параметров обстановки в зоне действия БРЛС АК РЛДН, реализуе­
мый вариант решения представим следующей последовательностью операций:
генерация возможных вариантов обработки
информа­
ции на борту АК РЛДН;
имитационное моделирование вариантов обработки РЛИ с оценкой харак­
теристик информативности комплекса
на множестве реализаций;
восстановление по результатам статистических испытаний совместных
функций плотностей распределения вероятностей (ФПРВ)
учитываемых
характеристик информативности;
запись множества значений совместных ФПРВ в специализированную вы­
числительную систему обработки и управления;
идентификация текущих условий применения
, определяе­
мых изменяющимися, но фиксируемыми на интервале
параметрами целе­
вой и помеховой обстановки;
определение изменяющихся, но фиксируемых на интервале
требо-
ваний Vx к информативности комплекса на различных этапах применения;
выбор наиболее эффективного варианта
цифровой обработки по крите­
рию максимизации обобщенного показателя информативности
Ниже представлены результаты многокритериального механизма выбора
минимально достаточного числа эффективных режимов цифровой обработки
РЛИ комплекса, взаимодействующего с разнородными потребителями инфор­
мации. Заданы следующие разделяемые во времени условия обработки:
раздельное
сопровождение
разрешаемых
воздушных
целей
сопровождение
групповых
целей
автосопровождение малоскоро­
стных или маневрирующих ВЦ или
работки
при
повышенной
осуществление об­
интенсивности
потока
и в условиях
ложных
отметок
радиоэлектронно­
го противодействия БРЛС.
При обосновании эффективных вариантов обработки, переключаемых в
зависимости от условий применения, получены следующие варианты [9]:
fri - основной режим обработки координатной информации с двухэтапной
процедурой обнаружения траекторий, оптимизированный для сопровождения с
высоким качеством прямолинейно движущихся целей;
fr2 - режим с управляемым порогом обнаружения, обеспечивающий улуч­
шение непрерывности сопровождения в ограниченной области пространства по
приоритетным ВЦ. Элементы разрешения, в которых допускается снижение
порога обнаружения, определяются в системе цифровой обработки РЛИ с уче­
том назначенных приоритетов;
fr3 - режим с управляемым критерием захвата, обеспечивающий при усло­
вии выполнения требований по достоверности увеличение дальности начала
выдачи траекторной информации;
fr4 - режим сопровождения маневрирующих целей, обеспечивающий по­
вышение непрерывности сопровождения одиночных целей, совершающих ма­
невры различной интенсивности;
fr5 - режим сопровождения групповых целей, обеспечивающий повышение
устойчивости сопровождения ВЦ, имеющих близкие кинематические параметры;
fr6 - режим управления числом каналов сопровождения, обеспечивающий
повышение производительности БРЛС в условиях работы по массированным на­
летам, например, путем включения упрощенного режима вторичной обработки
РЛИ с использованием а-, β-фильтрации и неоптимальной селекции отметок;
fr7 - режим управления критерием сброса траекторий с сопровождения,
учитывающий информационные ограничения в комплексах данного класса,
например при организации комбинированного управления одновременно
как параметрами движения самолета-носителя и режимами функционирова­
ния БРЛС.
Для реализации конфликтно-устойчивого выбора вариантов цифровой об­
работки информации путем целенаправленного последовательного «включе­
ния» обоснованных управляемых режимов
по результатам ими­
тационного моделирования режимов требуется осуществить восстановление с
использованием многомерных функций плотностей распределения вероятно­
стей характеристик информативности комплекса. Для оценки данных функций
можно использовать критерии согласия Колмогорова и хи-квадрат.
Пусть
- параметрически заданное множество условий функцио­
нирования БРЛС с трассовым выходом. Для конкретных значений
получены путем имитационного моделирования выборки исследуемой i-й ха­
рактеристики
на момент времени
. На
основе экспертного анализа формируются возможные законы распределения,
которым
может
подчиняться
случайная
величина
,
- вектор параметров, определяющих функцию распределения
F (·) j-ro закона распределения.
По полученным в результате имитационного моделирования выборкам
Y Pi необходимо получить оценку для отображения
(Θ - множество возможных значений параметров j-й функции распределе­
ния). Отображение F сопоставляет каждому значению ξ из множества допус­
тимых условий функционирования комплекса некоторые значения
со­
ответствующие номеру закона распределения и вектору параметров соответст­
вующей функции распределения.
Решение представленной задачи состоит из двух этапов: оценки закона рас­
пределения исследуемой характеристики ВИП YPi для конкретного значения ξ
из возможного диапазона условий функционирования комплекса Ω ξ на первом
этапе и аппроксимации отображения ρ по полученным оценкам этого отображе­
ния для конечного множества значений на втором этапе:
к = 1,...,М.
Вследствие того, что критерий согласия χ2 предполагает предваритель­
ную группировку выборочных данных (что приводит к потерям информации
при ограниченных объемах выборок), целесообразно использовать более точ­
ный критерий Колмогорова. В дальнейшем частная задача первого этапа со-,
стоит в проверке сложной гипотезы о принадлежности неизвестной функции
распределения наблюдаемой в опыте случайной величины Ypi заданному се­
мейству функций распределения:
Критерий согласия Колмогорова, как известно, основан на вычислении
статистики:
где
- эмпирическая функция распределения случайной величины Y Pi ,
построенная по выборке
N - объем выборки;
где
Поскольку проверяемая гипотеза
является сложной, то значе­
ния статистики DN зависят от номера проверяемой функции распределения
j = l,...,k и соответствующего вектора параметров этой функции Θ:. Поэтому
для принятия решения необходимо оценить также параметры закона распреде­
ления случайной величины Y pi . С этой целью предварительно для каждого
j = 1,..., k решается оптимизационная задача
На втором этапе определяются оптимальные параметры
I,
к = 1,..., Μ , на множестве условий работы численными методами аппроксима­
ции функций многих переменных. Однако при использовании различных вари­
антов цифровой обработки в БРЛС требуется раздельное восстановление зако­
нов распределения для фиксированных условий работы, что позволит оценить
возможности адаптации комплекса к условиям применения.
При недостаточной точности аппроксимации законов распределения ха­
рактеристик ВИП при проектировании реализуется статистическая обработка
результатов моделирования функционирования АК РЛДН с использованием
метода гистограмм.
Определим ФПРВ учитываемых характеристик информативности АК РЛДН
путем имитационного моделирования режимов
,
что равнозначно оценке безусловной
совместной функции распределения векторного случайного процесса для фик­
сированного момента времени на конечном множестве характеристик инфор­
мативности пх , внедряемых вариантов цифровой обработки Мр РЛИ и разде­
ляемых прогнозируемых условий функционирования Νγ комплекса.
При восстановлении совместной ФПРВ векторного случайного процесса
, в частности при имита­
ции процесса траекторной обработки РЛИ результаты отдельного испытания с
номером i представляют как вектор характеристик
Для получения аппроксимаций ФПРВ вектора YP на основании выбороч­
ных данных
(Ν Η - число проведенных испытаний) строятся
выборочные функции распределения как для отдельных компонентов вектора
ΥΡ (в виде функций одного аргумента), так и для нескольких компонентов (в
виде функций от нескольких аргументов).
На рис. 4.9 приведены результаты восстановления ФПРВ дальности захва­
та траекторий ( Д в и ) , среднего времени непрерывного сопровождения (Т н с ),
погрешности оценки плоскостных координат
и коэффициента ложных
трасс ( К л т ) для альтернативных вариантов обработки
соответст­
венно, характеризующих эффект коррелированности и размена характеристик
информативности при «включении» в работу различных механизмов управле­
ния цифровой обработкой РЛИ.
Корреляционные связи характеристик определяются по коэффициентам
ковариационной матрицы
Выбор групп независимых характеристик
проводится следующим образом.
Исключаются характеристики, для которых наблюдается сильная корре­
ляция с другими характеристиками. Это условие соответствует наличию явно
выраженной функциональной зависимости между отдельными характеристи­
ками. Далее группируются характеристики по признаку отсутствия корреляции
между различными группами.
Рис. 4.9
В процессе исследования ковариационной матрицы А в условиях воздей­
ствия на БРЛС активных помех выявлены следующие основные группы харак­
теристик
информативности [9, 13]:
Закон распределения второй и третьей групп характеристик (ошибки
определения плоскостных параметров траектории и высоты) с высокой точно­
стью аппроксимируется многомерным нормальным законом распределения,
параметры которого определяются в процессе фильтрации измерений и зависят
от длительности сопровождения и расстояния до цели. Первая группа характе­
ристик может быть представлена в виде нескольких независимых подгрупп ха­
рактеристик в зависимости от конкретных условий и режимов обработки ин­
формации. В результате совместная ФПРВ характеристик информативности
АК РЛДН может быть представлена в виде произведения совместных функций
плотности вероятности распределения независимых подгрупп характеристик:
Для ФПРВ характеристик первой группы элементарные функции распре­
деления в большинстве случаев не соответствуют друг другу, однако их рас­
пределение можно достаточно точно аппроксимировать линейной комбинаци­
ей известных ФПРВ в следующем виде:
где j - номер варианта цифровой обработки; .- номер условий функционирова­
ния;
- отдельные ФПРВ учитываемых характеристик.
В связи с возможностью такого аналитического представления ФПРВ ха­
рактеристик траекторной информации данные о законах их распределения мо­
гут быть сведены в таблицы и записаны в память бортовой вычислительной
системы АК РЛДН. Это позволит в условиях воздействия активных помех на
комплекс учесть неоднозначность влияния различных механизмов управления
цифровой обработкой РЛИ на информативность БРЛС и повысить на этой ос­
нове возможности ее адаптации к изменяющимся условиям применения.
В динамике антагонистического конфликта могут использоваться различ­
ные механизмы управления информативностью (рис. 4.10) проектируемой сис­
темы [10].
Рис. 4.10
В частности, в процессе обнаружения целей может быть предусмотрено
несколько режимов зондирования пространства, переключаемых в зависимости
от требований к выходным информационным потокам по решаемым задачам с
учетом идентифицируемых параметров активных помех, воздействующих на
данный ИД. При работе по «мерцающим» ПАП и воздействии на БРЛС им­
пульсных и непрерывных маскирующих активных помех требуется организо­
вать управление режимами комплексирования и обработки информации с уче­
том конкретных решаемых задач и определяемых в динамике применения па­
раметров складывающейся помеховой обстановки.
Использование конфликтно-устойчивых алгоритмов управления процес­
сами добывания и обработки информации в системе приводит к тому, что
структура обработки информации и порядок добывания информации оптими­
зируются таким образом, чтобы обеспечить максимальное качество решения
задач, а с учетом ограничений, направленных на снижение возможностей про­
тивника по разведке процесса функционирования АК РЛДН и оптимизации
эффективности в условиях определенных видов помех. Необходимым услови­
ем для обеспечения конфликтно-устойчивого управления является непрерыв­
ное наблюдение за складывающейся помеховой обстановкой, включающее об­
наружение, сопровождение постановщиков активных помех, а также оценку их
возможностей по разведке функционирования БРЛС АК РЛДН. В данном слу­
чае появляется взаимная зависимость процессов функционирования БРЛС и
противодействующих ей средств РЭП, что приводит к нестационарному харак­
теру поведения обеих сторон в динамике конфликта. Конечный результат, про­
являющийся в значениях частных характеристик качества выдаваемой инфор-
мации и обобщенного показателя эффективности функционирования системы,
зависит от применяемых стратегий управления обеих сторон и от всего много­
образия значений управляемых параметров, доступных каждой из сторон. На­
личие слабых сторон в управлении процессом обработки информации в усло­
виях целенаправленного радиоэлектронного подавления, характеризующегося
ведением разведки функционирования АК РЛДН и координацией действий
средств создания помех, приводит к реализации противником таких способов
РЭП, при которых эти слабые стороны проявляются в наибольшей степени.
В то же время, при несовершенстве стратегии радиоэлектронного подавления
или недостаточном числе приемов и способов радиоэлектронного подавления у
противника, эффективное конфликтно-устойчивое управление за счет снижения
уровня информированности противника о действиях АК РЛДН и выбора наиболее
эффективных способов обработки и добывания информации в идентифицирован­
ной помеховой обстановке позволяет избежать силовых способов радиоэлектрон­
ного подавления и тем самым обеспечить функционирование комплекса при зна­
чительно более низких уровнях помех. Это приводит к приближению частных по­
казателей качества функционирования до потенциально достижимых в
безпомеховой обстановке. Указанные особенности, связанные с нестационарно­
стью поведения системы «АКРЛДН - комплекс РЭП», создают определенную
сложность адекватной оценки полезного эффекта от внедрения конфликтноустойчивого управления, для описания которой необходима достаточно подробная
имитационная модель функционирования не только АК РЛДН, но и средств РЭП,
отражающая все составляющие радиоэлектронного конфликта.
Рассмотрим применение предложенных принципов для построения алго­
ритма управления БРЛС, содержащей следующие ИД:
многорежимную радиолокационную станцию;
канал пеленгации целей ПАП;
станцию радиотехнической разведки.
Исходное множество помеховых воздействий, создаваемых противостоящей
стороной, содержит различные виды помех, для которых формируется оптималь­
ный режим функционирования БРЛС. В динамике конфликта возможные управ­
ляемые режимы процессов формирования ВИП в условиях полного (частичного)
радиоэлектронного подавления БРЛС АКРЛДН представлены на рис. 4.10. В ча­
стности, в процессе обнаружения целей может быть предусмотрено несколько ре­
жимов зондирования пространства, переключаемых в зависимости от требований
к информативности, решаемых задач, видов и параметров активных помех, воз­
действующих на данный ИД. При работе по «мерцающим» ПАП, воздействии на
БРЛС импульсных и непрерывных маскирующих активных помех требуется орга­
низовать управление режимами комплексирования и обработки информации в
АК РЛДН с учетом конкретно решаемых задач и определяемых в динамике при­
менения параметров складывающейся помеховой обстановки.
Проводимая оценка пространственного распределения AS интенсивности
потока ложных отметок
в зоне S действия
БРЛС при воздействии импульсных помех позволяет реализовать соответст­
вующее управление обработкой (рис. 4.11) РЛИ и уменьшить за счет этого пе­
регрузки спецвычислителей по обработке информации в сложной целевой и
помеховой обстановке.
Рис. 4.11
Динамическое управление режимами обработки и комплексирования раз­
нотипной информации в БРЛС АКРЛДН (рис. 4.12, а, б) необходимо обеспе­
чивать с учетом восстановленной ΦΠΡΒ \ν σ приоритетных характеристик для
конкретных решаемых системой задач. В частности, с учетом соотношения
требуемого σ и реализуемого значений характеристики и максимизации по­
казателей эффективности БРЛС при обеспечении разнородных потребителей
информации. При этом алгоритм управляемого комплексирования при «мерца­
нии» ПАП упрощенно записывается следующим образом:
где χ - вектор состояния, определяемый используемыми моделями движения це­
л е й - управляемый параметр «включения» режимов комплексирования
на основе максимизации
- матрица усиления,
определяемая рекуррентными соотношениями фильтра Калмана-Бьюси.
Управление процессами автосопровождения ПАП при одиночных (груп­
повых) действиях АК РЛДН осуществляется на основе предварительно прове­
денной оценки динамических свойств альтернативных режимов обработки пе­
ленговой информации в пространстве переменных состояний. При технических
(временных) ограничениях в каналах связи на возможности обмена информа­
цией между несколькими комплексами РЛДН в состав управляемых парамет­
ров дополнительно включается изменяемый параметр ЕАо, характеризующий
темп асинхронного обмена пеленговой информацией между взаимодействую­
щими системами. При этом при минимальной загрузке каналов связи обеспе­
чивается существенное повышение точности оценивания координат длительно
излучающих целей-постановщиков активных помех за счет использования до­
полнительной пеленговой информации в каналах сопровождения. Аналогич­
ным образом можно использовать данный подход при организации режима
управляемой обработки пеленговой информации, получаемой от станции РТР.
Рис. 4.12
Имитационное моделирование функционирования подсистемы сопровож­
дения ПАП в пространстве состояний и последующая идентификация процес­
сов для различных вариантов внешних условий ξ2 е Ωξ позволяет представить
эволюцию изменения ошибок оценивания координат σ χγ ПАП во времени ко­
лебательными для упрощенных расчетов апериодическими (см. схему в пере­
менных состояния апериодического звена, рис. 4.13) динамическими звеньями.
При этом для оценки переходных процессов восстанавливаются коэффициенты
следующей системы уравнений состояния [10]:
где х3 ~ σ
u = l(t) - функция включения соответствующего режима сопрово­
ждения целей-ПАП, Τ,η,Κ - неизвестные параметры, определяющие динами­
ческие свойства «включаемого» режима (рис. 4.14).
Рис. 4.14
Моделирование типовых ситуаций применения показало, что вычисляемое
время Тпп переходного процесса установления ошибок определения координат
целей-постановщиков активных помех зависит как от геометрии АКРЛДНПАП, так и от точности измерения угловых направлений на данные цели и реа­
лизуемого темпа асинхронного обмена пеленговой информацией (рис. 4.15).
Оценки в подсистеме управления БРЛС реализуемой точности сопровождения
ПАП в реальном времени определяют целесообразность «включения» данного
режима в комплексе.
Рис. 4.15
Современные технологии позволяют конструировать АФАР, содержащие
разнотипные активные модули с различными рабочими частотами. Такие
АФАР могут одновременно работать на нескольких рабочих частотах и излу­
чать многочастотные сигналы. При этом имеется возможность в БРЛС проек­
тировать независимое управление угловым распределением излучения на раз­
личных рабочих частотах. Данные возможности ориентированы в первую оче­
редь на повышение качества информации об обстановке, хотя в условиях
радиоэлектронного конфликта качество добываемой информации в значитель­
ной степени зависит от мер противодействия, предпринимаемых противостоя­
щей стороной в ответ на функционирование средств разведки. Поэтому обес­
печение управляемости информационных датчиков, направленное на компен­
сацию радиоэлектронного подавления, напрямую связано с повышением
качества добываемой информации. В связи с этим, в условиях радиоэлектрон­
ного конфликта должны быть задействованы все возможности по динамиче­
скому изменению способов добывания информации в БРЛС, реализуемые при
помощи технологий АФАР.
Основная задача при управлении процессами добывания и обработки ин­
формации АК РЛДН в динамике конфликта со средствами РЭП состоит в вы­
боре такой комбинации способов защиты от помех, при которой определяемое
качество информации будет наилучшим в текущих условиях помеховой и воз­
душной обстановки. Поэтому реализация мер защиты от помех только на уровне
первичной обработки не позволяет обеспечить конфликтную устойчивость
комплекса как разведывательно-информационной системы при целенаправлен­
ном радиоэлектронном подавлении. Для повышения помехозащищенности
БРЛС целесообразно комплексное применение совокупности мер на этапах
зондирования, обработки и комплексирования информации.
4.4. Методы и алгоритмы функционирования подсистемы
сопровождения целей-постановщиков активных помех
по пеленговой информации бортовой
радиолокационной системы
В условиях полного (частичного) радиоэлектронного подавления БРЛС це­
лесообразно организовать сопровождение целей-постановщиков активных помех
по пеленговой информации с восстановлением их координат. При этом аппа­
ратно-программными средствами БРЛС формируется подсистема сопровожде­
ния, на которую подаются от пилотажно-навигационного комплекса (ПНК) па­
раметры движения АК РЛДН и проводятся идентификация, накопление и об­
работка пеленгов по всем радиоизлучающим объектам.
4.4.1. Кинематический метод оценки координат целей-ПАП
Кинематический метод определения координат в пространстве состояний
(динамико-кинематический метод) основан на математическом описании в
пространстве состояний собственного или относительного движения цели и
самолета-носителя АКРЛДН. В качестве фазовых координат относительного
движения при таком описании выступают дальность до цели, скорость сближе­
ния, угловые координаты и угловые скорости линии визирования, а в качестве
фазовых координат собственного движения цели - прямоугольные координаты
и их производные. Результаты измерений пеленгов используются в алгоритмах
фильтрации, как правило, калмановской [3, 16]. Применительно к задаче опре­
деления координат и параметров собственного движения цели рассмотрим по­
становку задачи и один из возможных вариантов синтеза оптимального после­
довательного алгоритма оценивания вектора состояния подвижной наземной
(морской) радиоизлучающей цели, заимствованной из [2, 15, 16] и реализую­
щий кинематический метод восстановления координат.
Рис. 4.16
Пусть самолет-носитель АК РЛДН, представленный на рис. 4.16 точкой
С, передвигается в неподвижной земной системе координат (НЗСК) OXYZ по
известной траектории и пусть при этом непосредственному наблюдению дос­
тупен дискретный случайный процесс
, значения которого в моменты
времени к представляют собой аддитивную смесь полезного сигнала
и дискретного шума n(k):
(4.2)
где
- векторы состояния движущейся цели и самолета-носи­
теля БРЛС соответственно.
Состав вектора наблюдения ξ ^ ) определяется возможностями БРЛС по
измерению тех или иных пространственных и радиотехнических параметров
сигналов от подвижных целей. Допустим, что наблюдение пространственных
параметров сигналов от цели осуществляется по двум углам, поэтому вектор
наблюдения имеет вид
(4.3)
где
- измеренные значения азимута и угла места соответственно.
Глава 4
Векторную функцию полезного сигнала, зависящую от текущих коорди­
нат самолета и цели, можно представить при помощи нелинейных относитель­
но Д ц (к) и Д с (к) выражений:
(4.4)
Вектор состояния Дц (к) движущейся цели, от которой зарегистрирован
ξ ^ ) , в общем случае размерностью п, имеет в составе неизвестные параметры,
описывающие движение цели. В нашем случае компонентами этого вектора
являются координаты положения, скорость и ускорение цели по соответст­
вующим координатным осям:
где
- текущие координаты цели в НЗСК, отображаемой точкой Ц
(рис. 4.16);
- скорости и ускорения цели соот­
ветственно по координатам χ и ζ. Положение самолета в системе ΟΧΥΖ оп­
ределяется вектором состояния
Дискретный шум наблюдения
(4.5)
считается стационарным гауссовским белым шумом с нулевым математиче­
ским ожиданием и известной матрицей дисперсий
(4.6)
где
- дисперсии ошибок измерения углов по каналам азимута и угла
места.
Для синтеза алгоритмов оценивания параметров радиоизлучающих объек­
тов помимо рассмотренной модели измерений необходимо располагать апри-
орными данными о возможном поведении объектов, т. е. моделью движения
цели - ПАП. При выборе модели движения маневрирующего объекта стремят­
ся к тому, чтобы описание этой модели было достаточно простым и в то же
время правильно отражало реальные траектории. Для различных классов объ­
ектов этому условию отвечают различные модели. Одной из наиболее широко
используемых на практике является динамическая модель движения [2], со­
гласно которой маневр рассматривается как стационарный случайный марков­
ский процесс с экспоненциальной функцией корреляции ускорения:
(4.7)
где <з\ - дисперсия ускорения объекта;
- постоянная времени маневра, за­
висящая от его характера.
В матричной форме разностное уравнение состояния, соответствующее
модели Зингера для случая ведения наблюдения за движущейся целью в дис­
кретном времени, может быть представлено в виде [15]
(4.8)
где Дц(к) - вектор состояния;
- фундаментальная матрица решений;
G(k-l) - переходная матрица возмущений;
-
вектор формирующих белых шумов, составленный из независимых случайных
величин
, распределенных по гауссовскому закону с нуле­
вым математическим ожиданием и единичными дисперсиями.
Применительно к решаемой задаче обработки фундаментальная матрица
Ф(к, к-1) имеет вид
/
с
(4.9)
Выражение для переходной матрицы возмущений G(k -1) приведено в [2], а
здесь для сокращения записей опущено.
Полученные уравнения состояния могут непосредственно использоваться
для построения алгоритма функционирования подсистемы сопровождения це­
лей - постановщиков активных помех. В соответствии с располагаемыми све­
дениями (4.2)-(4.9) имеем задачу нелинейной дискретной фильтрации. Извест­
но, что для получения точных алгоритмов нелинейной фильтрации марковских
процессов необходимо интегрировать уравнение Стратоновича. В общем слу­
чае эта задача неразрешима. Поэтому обычно рассматривают приближенные
способы решения. В данном случае используется алгоритм расширенного
фильтра Калмана, построенный на основе текущей линеаризации нелинейных
уравнений наблюдения. Эта методика основана на разложении коэффициентов
уравнения Стратоновича в ряд в окрестности точки оценки фильтруемого па­
раметра при условии, что имеет место малая ошибка фильтрации.
Разностные уравнения, определяющие значения оценки Дц вектора со­
стояния и матрицы апостериорных дисперсий D(k) ошибок фильтрации в дис­
кретные моменты времени к, для метода текущей линеаризации имеют вид
(4.10)
(4.11)
где экстраполированные с шага (к-1) на шаг к оценки вектора состояния Дэц и
матрицы априорных дисперсий D определяются выражениями
(4.12)
(4.13)
Здесь
- матрицы дисперсий белых гауссовских дискретных
шумов состояний и наблюдения, которые будем считать независимыми от номе­
ра шага фильтрации, в силу чего
Под
векторной производной
следует понимать матрицу раз­
мерностью m χ η производных полезного сигнала, где m, n - размерности со­
ответственно векторов наблюдения и состояния.
Для решения разностных уравнений (4.10)-(4.13) необходимо знать на­
чальные условия. При наличии в БРЛС априорной информации о цели, напри­
мер при прицеливании по корабельной РЛС, когда по данным целеуказания от
других средств известна плотность вероятности вектора состояния цели, в ка­
честве начальной оценки вектора состояния Д 0ц и начальной матрицы апосте­
риорной дисперсии D0 можно задавать соответственно математическое ожи­
дание и корреляционную матрицу этой плотности вероятности.
При отсутствии априорных данных о текущих параметрах движения цели
начальные значения оценок координат х 0ц , г0ц можно формировать, исходя из
геометрии прямоугольного треугольника и на основании измерения азимута
а0 и угла места β0 цели в соответствии с выражениями:
где
- координаты АК РЛДН в НЗСК в начальный момент времени
— углы визирования цели по азимуту и углу места.
Начальные значения скорости и ускорения движения цели выбирают, ис­
ходя из диапазона возможных скоростей и ускорений для заданных типов дви­
жущихся целей.
Результаты численных расчетов синтезированного квазиоптимального по­
следовательного алгоритма оценивания текущих параметров движения цели по
критерию минимума среднего квадрата ошибки показали [2,15], что предла­
гаемые алгоритмы работоспособны при наличии флуктуационных погрешно­
стей в измерениях азимута и угла места. Это обстоятельство свидетельствует о
возможности использования их в БРЛС, в частности при оценке координат радиоизлучающих объектов наземного (надводного) базирования.
4.4.2. Метод и реализующий его алгоритм самотриангуляции
в БРЛС для сопровождения целей-ПАП
В реальных условиях функционирования при полном радиоэлектронном
подавлении активных радиолокационных каналов информационных средств и
при отсутствии дополнительных разнесенных источников пеленговой информа­
ции в АКРЛДН определение местоположения излучающих целей (ИЦ) стано­
вится невозможным. В таких ситуациях БРЛС работает автономно и использует
собственную информацию пассивных радиолокационных каналов для органи­
зации сопровождения данных объектов. Для неподвижных информационных
средств наземного базирования по собственной пеленговой информации име-
ется возможность определять однозначно только направление движения объек­
та. Если комплекс перемещается по непрямолинейной траектории, то по четы­
рем измерениям пеленга и навигационным данным можно вычислять коорди­
наты и вектор скорости данных целей. На практике вследствие того, что изме­
рения пеленгов содержат ошибки и траектория движения носителя БРЛС не
всегда допускает изменения (или она заранее неизвестна), фактическая точ­
ность сопровождения ИЦ по собственной пеленговой информации данным
способом недостаточна. Поэтому разработка метода самотриангуляции, осно­
ванного на обработке собственной пеленговой информации в БРЛС и позво­
ляющего повысить точность оценивания параметров движения ИЦ, является
практически важной для повышения помехозащищенности комплекса.
Пусть состояния траектории ИЦ и носителя (подвижного пеленгатора) в де­
картовой неподвижной системе координат заданы соответствующими векторами:
где
- координаты цели (носителя);
скорости в i -й момент времени
зора);
- проекции векторов
- период дискретного об­
- четырехмерное пространство состояний траекторий.
Тогда значения вектора состояния §Λ цели, движущейся по линейной тра­
ектории, в i - и η -й моменты времени связаны выражением
где В - матрица перехода состояний для прямолинейного равномерного дви­
жения.
Значение азимута цели относительно комплекса в момент времени tA оп­
ределяется функцией наблюдения:
В большинстве практических ситуаций справедливо предположение о
нормальном законе распределения ошибок измерения пеленга. Тогда функция
правдоподобия для вектора состояния s)J может быть записана в виде
где φ; - измеренное значение азимута на i-м обзоре; σ2 - дисперсия ошибок
измерения азимута.
Потенциальную точность определения параметров траектории излучаю­
щих объектов можно оценить при помощи информационной матрицы Фишера.
Исходя из определения этой матрицы, можно получить выражение для инфор­
мационной матрицы:
Ранг информационной матрицы равен размерности подпространства на­
блюдаемых параметров движения цели в пространстве состояний. Если число
измерений пеленга не менее четырех и траектория пеленгатора не является пря­
молинейной равномерной, то ранг матрицы Φ равен четырем. В этом случае
имеется возможность получить оценку параметров траектории движения цели.
Если комплекс перемещается равномерно прямолинейно, то ранг матрицы
Φ не превышает трех. В этом случае предлагается разделить оцениваемое про­
странство состояния на прямую сумму подпространств наблюдаемых и нена­
блюдаемых параметров траекторий путем введения подвижной полярной сис­
темы координат.
Рассмотрим преобразование информационной матрицы Φ в подвижную
полярную систему координат
координат соотношениями
, связанную с декартовой системой
где Д - расстояние от пеленгатора до цели; φ - текущий азимут; г, τ - отно­
шения радиальной и тангенциальной составляющих вектора относительной
скорости цели к Д.
Экстраполированные значения состояний траектории на один шаг в новой
системе координат определяются следующим нелинейным преобразованием:
где
Матрица Φ преобразуется к виду
где
Таким образом, если траектория носителя линейна, то наблюдаемыми па­
раметрами являются φ, г, τ. Если τ = 0 (что соответствует такой траектории це­
ли, при которой величина азимута постоянна), то, как видно из последнего вы­
ражения для матрицы Φ, ее ранг равен двум. Наблюдаемыми параметрами в
этом случае являются φ, τ.
На практике, как правило, известны пределы значений дальности и абсо­
лютной величины скорости цели, которые можно рассматривать как априор­
ную информацию о параметрах ее траектории.
Предположим, что априорная информация о траектории цели задана в ви­
де матрицы точности Ф а . В этом случае функция правдоподобия для вектора
состояния записывается в виде [6]
где sa - некоторая априорная оценка вектора состояния.
В выражение для информационной матрицы добавляется при этом допол­
нительное слагаемое Ф я .
Наличие априорной информации только о дальности не влияет на точ­
ность оценивания наблюдаемых параметров движения. Точность оценивания
дальности не зависит от числа измерений пеленга и значений остальных пара­
метров. Наличие априорной информации о величине скорости цели позволяет
повысить точность оценок параметров г их.
Оптимальная оценка вектора состояния траектории цели по критерию мак­
симума функции правдоподобия является решением уравнения
которое можно представить в виде
,
Полученное уравнение является нелинейным относительно sJJ.
Для вычисления оценки вектора состояния в соответствии с ним требуется
применить сложные вычислительные процедуры, поэтому целесообразно рас­
смотреть возможность нахождения приближенных оценок более простым путем.
Оценку вектора состояния траектории цели будем проводить в от­
носительной системе координат, связанной с БРЛС АК РЛДН:
Допустим, что на текущем обзоре получено измерение фп и известна ап­
риорная информация о значении вектора состояния на предыдущем обзоре,
представленная матрицей точности Фа и оценкой вектора состояния s a . Тогда
уравнение преобразуется к следующему [6]:
Следовательно,
Введем обозначения
С учетом этих обозначений уравнение для оценки параметров траектории
ИЦ можно представить в виде
Для того чтобы получить приближенное решение этого уравнения, разло­
жим функции
в ряд Тейлора в точке s = s3 и подставим в дан­
ное уравнение, пренебрегая членами, нелинейными по As :
где
Решая полученное уравнение относительно As получим выражение для
оценки вектора состояния [6]:
Следует отметить, что если пренебречь величиной вторых производных
функции наблюдения, то используя лемму об обращении матриц можно полу­
чить выражение для оценки вектора состояния, совпадающее с соотношением
фильтра Калмана.
В связи с тем, что размерность подпространства наблюдаемых параметров
зависит от вида траектории АК РЛДН, обращаемая матрица в уравнении для
оценки вектора параметров траектории ИЦ может оказаться плохо обусловлен­
ной при большой априорной неопределенности о дальности до излучающего
воздушного объекта. Поэтому при прямолинейной равномерной траектории
пеленгатора представление вектора состояния в декартовой системе координат
нецелесообразно.
Представление вектора состояния в полярной системе координат с огра­
ничением вектора состояния на подпространство наблюдаемых параметров по­
зволяет обеспечить устойчивость процесса оценивания параметров траектории.
Из приведенных выше соотношений следует, что на прямолинейном уча­
стке траектории АК РЛДН оценивается величина вектора скорости цели в от­
носительной системе координат, а на нелинейных участках - в неподвижной
системе координат. В связи с этим при пересчете значений вектора состояния
цели в различные системы координат необходимо учитывать текущее значение
вектора скорости пеленгатора.
На участках разворота комплекса представляет интерес исследование за­
висимости ошибок оценивания дальности до цели од от длительности процесса
обработки пеленговой информации при фиксированном периоде обзора. Для
известных априорных данных, в которых могут находиться значения дальности
(Д т к 1 , Д т а х ) и скорости излучающего объекта Vmax , матрица точности опреде­
ляется как
где
Вычисление оценок σΛ для определенных исходных данных (Д т а х = 650 км,
Д т | п = 5 0 к м , σ =0,5°) проведено методом статистических испытаний для
шести вариантов траектории излучающих объектов и двух вариантов траекто­
рий комплекса, которые показаны на рис. 4.17.
Рис. 4.17
На рис. 4.18, а и 4.19, а приведены выраженные в процентном отношении
от дальности до излучающих объектов зависимости значений σ 0 , обеспечивае­
мые алгоритмом сопровождения пеленговых траекторий, на рис. 4.18, б и
4.19, б для сравнения показаны потенциальные значения а д , полученные в ре­
зультате вычисления информационной матрицы.
Рис. 4.18
Рис. 4.19
Обобщенная блок-схема алгоритма самотриангуляции, выполненного в
соответствии с приведенными выше расчетными соотношениями, показана на
рис. 4.20.
Рис. 4.20
Таким образом, для достижения высокой точности оценки параметров
траекторий сопровождаемых ИЦ требуется либо введение длительного интер­
вала обработки измерений в БРЛС, либо реализация, как минимум, асинхрон­
ного режима обмена пеленговой информацией между взаимодействующими
комплексами. При полностью автономной работе формируемая траектория
АК РЛДН должна обеспечивать максимизацию изменения (по модулю) прово­
димых измерений пеленгов, осуществляемых в дискретные моменты времени.
4.5. Метод защиты от ответных импульсных помех,
основанный на совместном применении
разностно- и суммарно-дальномерного способов
определения координат
Ответной реакцией на излучение зондирующего сигнала БРЛС может
быть не только отраженный сигнал от воздушного объекта, но и излученные
целью активные радиопомехи индивидуальной защиты, что также демаскирует
разведываемый объект. В связи с этим, предполагая наличие подобной реакции
от цели, излучение зондирующих сигналов может выполняться не только для
анализа отражений зондирующего сигнала, но также и с целью формирования
разведываемым объектом ответных излучений. Применение станций РТР в со­
ставе информационных датчиков АК РЛДН предоставляет дополнительные
возможности по обнаружению объектов по их излучениям, детальному анализу
помеховой обстановки и реализации многопозиционных активно-пассивных
способов радиолокации.
Излучающие РЭС, в том числе и постановщики имитирующих помех, мо­
гут быть идентифицированы станцией радиотехнической разведки. При этом
возможно не только определение координат излучающих объектов, но и распо­
знавание типов РЭС.
Совместное применение БРЛС с ФАР и станций РТР позволяет опреде­
лить местоположение целей с использованием активных, активно-пассивных и
пассивных методов радиолокации, при этом возможна реализация многочис­
ленных методов определения местоположения разведываемых объектов: дальномерно-угломерный, суммарно-дальномерный, разностно-дальномерный, уг­
ломерно-угломерный и др.
Для определения местоположения излучающих объектов используются
многопозиционные комплексы радиотехнической разведки, состоящие из не­
скольких станций РТР, или комплексирование информации от средств актив­
ной радиолокации и станции РТР при групповых действиях АК РЛДН.
Дополнительные возможности по защите от активных помех появляются
при использовании информации от разнесенных источников. Применение разностно-дальномерного или суммарно-дальномерного метода определения коорди­
нат предполагает наличие, как минимум, одного источника всенаправленного
излучения зондирующих сигналов и трех разнесенных приемных устройств. Ес­
ли излучение направленное, то достаточно двух разнесенных приемных пунктов
(в качестве одного из них может использоваться радиолокационная станция). То­
гда определение координат выполняется по известному направлению излучения
и по оценке суммы или разности дальностей до обнаруживаемого объекта. Такой
метод может применяться в условиях постановки противником ответных им­
пульсных помех группового прикрытия для обнаружения объектов, находящихся
за постановщиком помех относительно АК РЛДН.
Разность времен приема зондирующего сигнала пропорциональна разно­
сти дальностей до излучающего объекта и однозначно определяет гиперболоид
возможных положений цели, от которой этот сигнал отражен или которая из­
лучила сигнал. Направление излучения зондирующего сигнала позволяет одно­
значно определить местоположение источника сигналов путем нахождения
точки пересечения с указанной гиперболой. Тем самым обеспечивается селекция
всех ложных отметок, создаваемых ПАП. Такой эффект наблюдается даже при
условии, когда помеха излучается антенной с широкой диаграммой направлен­
ности и воздействует на приемные устройства всех элементов многопозицион­
ной системы. В этом случае определяются также и координаты самого ПАП.
Принцип применения указанного способа селекции многократных им­
пульсных имитационных помех рассмотрим на примере многопозиционной
системы, в которой используются БРЛС АК РЛДН в качестве приемо­
передающего устройства с направленным излучением и вынесенная станция
РТР в качестве слабо направленного приемника излучений. Станция радиотех­
нической разведки находится на расстоянии В от БРЛС, которое называется
базой многопозиционной системы. Без ограничения общности можно полагать,
что постановщик активных помех находится в направлении βπ относительно
линии, соединяющей элементы многопозиционной системы и на дальности Rn
относительно БРЛС, а прикрываемые постановщиком помех объекты располо­
жены вдоль линии визирования БРЛС-ПАП (рис. 4.21).
Рис. 4.21
За момент времени отсчета принимается момент излучения БРЛС зонди­
рующего импульса. После этого БРЛС и станция РТР выполняют прием сигна­
лов в течение времени, необходимого для прохождения излученным сигналом
расстояния до установленной максимальной дальности и обратно.
Время приема сигналов БРЛС, отраженных от целей, связано с расстояни­
ем до целей соотношением
, где с - скорость света, а время приема
импульсных помех, создаваемых постановщиком помех,
где
t3 - задержка в излучении помехи после обнаружения зондирующего сигнала
средством исполнительной радиотехнической разведки постановщика помех.
Зависимость времени приема отраженных от целей сигналов станцией РТР
имеет вид
, а зависимость времени приема импульсных по­
мех, создаваемых постановщиком помех,
Из указанных зависимостей следует, что при приеме сигналов, излучен­
ных постановщиком помех, разность времени приема этих сигналов БРЛС и
РТР не зависит от времени задержки излучения помехи:
а при приеме зондирующих сигналов от целей разность этих времен определя­
ется разностью расстояний до целей:
При уверенном приеме всех сигналов в АК РЛДН как станцией РТР, так и
БРЛС достаточно использовать разностно-дальномерно-угломерный метод для
определения координат целей, прикрываемых постановщиком помех, и самого
ПАП. Но когда возможны пропуски сигналов и число принятых сигналов вели­
ко: в зоне разведки находится несколько целей и создаются многократные им­
пульсные помехи, имеют место ошибки определения времени приема сигналов,
цели не расположены в точности на одной линии с постановщиком помех, воз­
никает неопределенность, связанная с невозможностью сопоставить моменты
приема одних и тех же сигналов на обоих пунктах приема. Для разрешения та­
кой неопределенности может быть применен подход, основанный на вычисле­
нии суммы времен приема сигналов. После сопоставления моментов времени
приема сигналов, принятых на разных приемных пунктах, сигналы, излученные
постановщиком помех, селектируются по признаку совпадения разности вре­
мен их приема, что дает возможность выявить только те зондирующие сигна­
лы, которые обусловлены отражением от прикрываемых объектов.
Для оценки точности данного метода, рабочей зоны многопозиционной
радиолокационной системы, а также оптимизации этой рабочей зоны может
быть применен универсальный для любого типа многопозиционных радиоло­
кационных систем метод, изложенный в работе [1].
В результате использования указанного метода радиолокации становится
неэффективной постановка имитирующих помех и при распознавании такой
ситуации постановщик помех будет вынужден перейти к постановке менее эф­
фективных шумовых маскирующих помех, что существенно повысит энерге­
тический выигрыш для БРЛС АК РЛДН.
В итоге рассмотренные пути повышения помехозащищенности БРЛС
АКРЛДН представлены на рис. 4.22, 4.23. При этом мероприятия по обеспече­
нию скрытости должны базироваться на использовании частотного, структур­
ного, временного, амплитудного и пространственного способов скрытия излу­
чений, по помехоустойчивости - на наращивании энергетики, использовании
предпочтительных с точки зрения помехозащищенности зондирующих сигна­
лов, совершенствовании межпериодной и межобзорной обработки, конфликт­
но-устойчивого управления режимами излучения и обработки.
ЗАДАЧИ
Совершенствование
защиты от активных
шумовых помех (АШП)
Реализация защиты
от когерентных ответноимпульсных помех
(ОИП)
Совершенствование
пассивных каналов
разведки
МЕРОПРИЯТИЯ
ВОЗМОЖНЫЙ ЭФФЕКТ
Реализация адаптивной
перестройки частоты
На 20.. .30 % увеличить
дальность обнаружения
Применение автокомпенсаторов помех
На 10.. .25 дБ уменьшить уровень
бокового приема помех
от одиночных ПАП
Внедрение активной маскировки
излучения
На 3... 10 дБ уменьшить уровень
воздействующей АШП
Реализация управляемых
(от РТР или ВО) режимов мерцания
Повышение скрытости работы
Внедрение активной маскировки
излучения
Снижение потока ОИП
(в несколько раз)
Реализация СПБП
Исключение приема ОИП
по боковым лепесткам
Совершенствование межпериодной
и межобзорной обработки
Снижение числа ложных трасс
Исключение регулярности
сканирования
Дезорганизация систем РЭБ
противника
Реализация сверхразрешения
В 2-3 раза улучшаются
разрешающие способности
пеленгационного канала (ПК)
Внедрение вторичной обработки
пеленговой информации
В 1,3-2 раза увеличивается
точность пеленгации ПАП
Использование самотриангуляции
Точность определения ПАП:
10...20 км по R, 10...30° по β,
5-30° по ε
Реализация корреляционной
системы обработки
Точность определения координат
ПАП
30... 100 км (по дальности)
Рис. 4.22
Рис. 4.23
Для повышения скрытости и помехозащищенности целесообразна актив­
ная маскировка излучения ложными сигналами (ЛС). Одним из возможных пу­
тей реализации этого подхода является включение в состав БРЛС комплекса
РЛДН станций помех или дополнительных передатчиков (ДП).
При реализации данного подхода даже при известном диапазоне пере­
стройки БРЛС противник будет вынужден проводить подавление комплекса по
боковым лепесткам заградительной (скользящей) помехой с шириной спектра
не менее 200...500МГц. С точки зрения улучшения помехозащищенности от
многократных ответно-импульсных помех использование ЛС позволяет сни­
зить в несколько раз поток ложных отметок. При этом в состав БРЛС необхо­
димо включить компенсационную антенну и ДП с возможностью быстрой пе­
рестройки частоты.
Системным методом повышения помехозащищенности (ПЗ) на основе ЛС
является одновременное использование с АК РЛДН управляемых (неуправляе-
мых) имитаторов излучения авиационных комплексов (УИИ АК, НИИ АК),
создающих ложное поле излучения и дезорганизующих системы РЭП вероят­
ного противника по частотам и числу работающих АК. При этом за счет лож­
ного увеличения числа пространственно разнесенных излучателей повышается
также живучесть реальных комплексов. Для увеличения ЭПР носителей У(Н)
ИИАК до ЭПР выбранного носителя можно использовать линзы Люнеберга.
Внедрение управляемых режимов мерцания (УРМ) должно базироваться
на применении данных анализатора помеховой обстановки (ΑΠΟ), исполь­
зующих информацию ПК (РТР) комплекса РЛДН и обеспечивающих адаптив­
ное включение (выключение) излучения БРЛС в зависимости от складываю­
щейся воздушной и помеховой обстановки. Дополнительным источником ин­
формации для определения стратегии управления мерцанием может служить
информация БВС по результатам вторичной обработки (ВО), позволяющая
рассчитать переменные периоды включения (выключения) излучения в зави­
симости от решаемых задач АК и качества сопровождения приоритетных и не­
приоритетных целей в отдельных секторах.
Схемными методами снижения уровня бокового приема в направлении на
ПАП могут быть разработка и внедрение в БРЛС АК РЛДН специальных авто­
компенсаторов помех, учитывающих квазинепрерывный режим работы с коге­
рентным накопителем отраженных от целей сигналов на фоне мощных отража­
телей от подстилающей поверхности.
Реальным и практически реализуемым способом улучшения индивидуаль­
ной ПЗ является перестройка несущей частоты (ПНЧ), осуществляемая слу­
чайным образом в пределах возможной полосы работы (без учета спектра воз­
действующей помехи). При этом ПНЧ в режиме КНИ возможна от пачки к
пачке, в режиме НЧ - от импульса к импульсу. Адаптивная (по данным анали­
затора спектра) перестройка позволяет увеличить дальность обнаружения при­
крытых помехами целей не менее чем на 20.. .30%.
Внедрение в АК РЛДН ФАР с электронным сканированием в азимуталь­
ной плоскости появляется возможность защиты от ответно-импульсных помех
за счет псевдослучайного выставления обзорного луча, исключения регулярно­
сти в сканировании и дезорганизации тем самым средств РЭБ противника.
Таким образом, заданный уровень помехозащищенности может быть
достигнут за счет внедрения в комплексе специальных технических мер инди­
видуального и системного характера. Реализация принципов конфликтноустойчивого управления процессами обработки информации в БРЛС позволит
повысить его разведывательно-информационные возможности при обнаруже­
нии и сопровождении воздушных целей, обеспечить адаптацию системы к из­
менению решаемых задач разведки и параметрам целевой и помеховой обста­
новки.
Литература
1. Астапенко Ю.А., Вакуленко А.А., Диев Ю.А., Силкин А.Т. Оптимизация рабочей зоны много­
позиционной радиолокационной системы при ограничениях по дальности видимости. - Ра­
диотехника, 2000, № 1 1 .
2. Белов С.Г., Коданев В.Л. Оптимальная фильтрация текущих координат подвижных радио­
электронных средств. Цифровая обработка сигналов: Научно-методические материалы / Под
ред. Е.Ф. Толстова. - М.: ВВИА им. проф. Н.Е. Жуковского, 1995.
3. Браммер К, Зиффлинг Г. Фильтр Калмана - Бьюси / Пер. с нем. - М.: Наука, 1982.
4. Вайпан С.Н., Вакуленко А.А., Король О.В., Яголъников, СВ. Метод формирования эффектив­
ного множества режимов работы для конфликтно-устойчивого многофункционального ра­
диотехнического комплекса. - Радиотехника, 1997, № 5.
5. Вайпан С.Н., Вакуленко А.А., Кузьмин Г.В., Яголъников СВ. Метод конфликтно-устойчивого
выбора режима функционирования радиотехнического комплекса в изменяющихся условиях.
- Радиотехника, 1996, № 1 1 .
6. Вайпан С.Н., Вакуленко А.А., Кузьмин Г.В., Яголъников СВ. Метод обработки пеленговой ин­
формации в подвижных радиотехнических комплексах для оценки параметров траекторий
излучающих объектов. - Радиотехника, 1996, № 1 1 .
7. Вайпан С.Н., Вакуленко А.А., Рюмшин А.Р. И др. Выбор показателя эффективности для синте­
за многофункциональных систем. - Радиотехника, 1997, № 1 1 .
8. Вайпан С.Н., Вакуленко А.А., Яголъников СВ. Метод обоснования стратегии управления ра­
диоэлектронной системы в динамике конфликта. - Радиотехника, 2004, № 5.
9. Верба B.C., Вакуленко А.А., Дод В.Н. Методика выбора в реальном масштабе времени эффек­
тивного варианта цифровой обработки радиолокационной информации в многофункцио­
нальном радиотехническом комплексе с трассовым выходом. - Радиотехника, 2005, № 5.
10. Верба B.C., Вакуленко Α.Α., Дод В.Н. Организация конфликтно-устойчивого управления ин­
тегрированной радиоэлектронной системой в динамике конфликта со средствами радиоэлек­
тронного подавления. - Радиотехника, 2006, № 1.
11. Верба B.C., Вакуленко А.А., Дод В.Н. Принципы управления многофункциональными интег­
рированными радиоэлектронными системами в динамике конфликта со средствами радио­
электронного подавления. - Радиотехника, 2005, № 5.
12. Владимиров В.И., Лихачев В.П., Шляхин В.М. Антагонистический конфликт радиоэлектрон­
ных систем. Методы и математические модели / Под ред. В.М. Шляхина. - М.: Радиотехника,
2004.
13. Голъденберг Л.М., Матюшкин БД., Поляк М.Н. Цифровая обработка сигналов: Справочник. М.: Радиосвязь, 1985.
14. Защита от радиопомех / Под ред. М.В. Максимова. - М.: Сов. радио, 1976.
15. Защита радиолокационных систем от помех. Состояние и тенденции развития / Под ред.
А.И. Канащенкова и М.И. Меркулова. - М.: Радиотехника, 2003.
16. Зингер Р.А. Оценка характеристик оптимального фильтра для слежения за пилотируемой це­
лью. - Зарубежная радиоэлектроника, 1971, № 8.
17. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной
информации. — М.: Радио и связь, 1986.
18. Радиоэлектронные системы: Основы построения и теория. Справочник /Под ред. ЯД. Ширмана. - Изд. 2-е, перераб. и доп. - М.: Радиотехника, 2007.
19. Этингтон Д.Α., Карилас П.Дж., Райт Дж.Д. Многофункциональные вращающиеся РЛС с
электронным сканированием для обзора воздушного пространства. - ТИИЭР, 1985, Т. 73, № 2.
ГЛАВА 5
ОСОБЕННОСТИ ПОСТРОЕНИЯ И ФУНКЦИОНИРОВАНИЯ
СИСТЕМЫ НАВЕДЕНИЯ ИСТРЕБИТЕЛЕЙ
НА ВОЗДУШНЫЕ ЦЕЛИ
5.1. Особенности построения и режимы работы
системы наведения истребителей на воздушные цели
Система наведения истребителей с АК РЛДН представляет собой одну из
наиболее сложных разновидностей систем командного радиоуправления
(СКРУ) [13] - совокупности функционально связанных подсистем (устройств),
предназначенных для наведения ЛА по командам, формируемым на пункте
управления и передаваемым на борт управляемого объекта при помощи радио­
линии [12].
Состав и функциональные связи СКРУ на базе АК РЛДН иллюстрирует
рис. 5.1.
Рис. 5.1
Информационно-вычислительная система (ИВС) АКРЛДН содержит из­
мерители различной физической природы (см. рис. 1.6), бортовую вычисли­
тельную систему (БВС), передающую часть командной радиолинии управле­
ния (ПРД КРУ) и автоматизированное рабочее место штурмана наведения. На­
водимый истребитель включает летательный аппарат как объект управления
(ОУ), его систему автоматического управления (САУ) и ИВС в составе борто­
вых измерителей, БВС и приемной части КРУ (ПРМ КРУ).
На основе информации, извлекаемой измерителями из сигналов, посту­
пающих от цели и наводимого истребителя, на индикаторе АРМ отображает­
ся воздушная обстановка. По результатам оценки этой обстановки штурма­
ном наведения совместно с БВС решаются задачи целераспределения, выбора
методов наведения ОУ на цель и определяется состав управляющих и инфор­
мационных сообщений, передаваемых при помощи КРУ на наводимые ЛА.
Эти сообщения принимаются приемной частью КРУ наводимого истребителя,
дешифрируются и с учетом информации от собственных измерителей преоб­
разуются в команды наведения либо используются экипажем для информации
о воздушной обстановке. В свою очередь команды наведения поступают в
САУ для управления истребителем в соответствии с командами, поступаю­
щими от АК РЛДН.
В общем случае в АК РЛДН используются режимы командного наведения
(КН), командного наведения с координатной поддержкой и полу автономных
действий (ПАД).
При командном наведении управление истребителем осуществляется вы­
дачей на его борт команд наведения и целеуказания, сформированных на пунк­
те управления (наведения), при наличии на нем регулярной информации о це­
лях и истребителе.
При командном наведении с координатной поддержкой наряду с коман­
дами наведения и целеуказания на борт истребителя периодически передается
информация о цели, что позволяет в любой момент перейти к таким способам
выхода в боевое соприкосновение, как бортовое наведение и бортовой поиск.
Последние иногда рассматриваются как разновидности обобщенного способа
выхода в боевое соприкосновение, называемого бортовым управлением и ис­
пользуемого при полу автономных действиях истребителей.
Под полуавтономными действиями понимаются действия одиночных и
групп истребителей в АСУ, при которых задачи поиска, наведения и атаки ре­
шаются их бортовыми средствами управления по информации, поступающей
от внешних источников.
Возможность осуществления полуавтономных действий истребителей
обеспечивается их бортовой вычислительной системой, которая по регулярной
и прерывистой информации о координатах и параметрах движения цели (груп­
пы целей), передаваемой по КРУ с АК РЛДН, может самостоятельно решать
задачу управления самолетом для вывода в район обнаружения и атаки воз­
душного противника.
Следует иметь в виду, что при бортовом управлении (бортовое наведение,
бортовой поиск) команды наведения для истребителя на ПН не формируются.
Бортовое наведение применяется
при большой загрузке штурмана АК РЛДН в процессе отражения масси­
рованного налета средств воздушного нападения;
при сбоях команд наведения и неустойчивом решении задачи наведения,
что определяется по отклонению фактических параметров полета истребителя
от заданных и нестабильности расчетного рубежа перехвата по дальности и на­
правлению;
при наличии на АК РЛДН регулярной координатной информации о цели и
отсутствии такой о истребителе, с которым поддерживается связь;
при необходимости дублирования этапа самонаведения истребителя в
случае подавления помехами его БРЛС либо выхода последней из строя.
При бортовом наведении информация координатной поддержки выдается
пунктом наведения с темпом, позволяющим истребителю устойчиво выходить
в область атак цели. Бортовое наведение, как правило, используется для дейст­
вий ударных групп.
Бортовой поиск используется при наличии на АК РЛДН либо разовой пре­
рывистой либо априорной информации о цели, по которой нельзя реализовать
командное и бортовое наведение. Кроме того, в случае длительного прекраще­
ния поступления на борт информации при командном и бортовом наведении ис­
требитель автоматически переключается на бортовой поиск, используя принятые
ранее и запомненные координаты. При этом аппаратура истребителя осуществ­
ляет экстраполяцию положения цели на текущий момент времени по последним
данным координатной поддержки. В случае возобновления передачи на борт ис­
требителя соответствующей информации имеется возможность «вернуться» к
управлению по командам или по информации, передаваемой через КРУ.
Бортовой поиск характерен для действий поисковых групп и реализуется в
результате совместного поиска цели бортовыми РЛС группы в боевом порядке,
обеспечивающем наибольшую зону просматриваемого пространства и необхо­
димое взаимное перекрытие зон обзора РЛС. Обнаружив цель, ведущий группы
организует боевые действия группы по ее уничтожению.
Групповые действия - действия, направленные на решение какой-либо
общей боевой задачи группой из нескольких истребителей. Групповые дейст­
вия обеспечивает находящаяся на борту аппаратура автоматизированного об­
мена информацией между самолетами группы и ее отображения на специаль­
ных индикаторах. Это позволяет использовать в АК РЛДН один канал наведе­
ния для управления группой, передавая команды и информацию о координатах
цели и тактической обстановке на борт ведущего группы. В свою очередь
ведущий самостоятельно управляет своей группой, осуществляя координацию
действий всех ее экипажей.
Группа истребителей может вести боевые действия одним из трех спо­
собов:
при командном управлении АК РЛДН;
полу автономно;
автономно.
Командное управление предполагает движение ведущего истребителя
группы в соответствии с передаваемыми ему командами. Остальные истреби­
тели группы, получая и выполняя те же команды или выполняя команды веду­
щего, выдерживают определенный боевой порядок.
Полуавтономные действия состоят в том, что непосредственные команды
управления движением истребителей формируются ведущим группы на осно­
вании информации, передаваемой с АК РЛДН.
Автономные действия группы осуществляются без какого-либо участия
пункта наведения, а только по командам ведущего.
Боевая работа АКРЛДН начинается с момента загрузки на аэродроме в
базу данных полетного задания и карты местности (карты ТВД). В полетном
задании содержатся маршрут полета АК РЛДН и вся оперативно-тактическая
обстановка в зоне его действия. Оперативно-тактическая информация поступа­
ет на АРМ командира расчета, который при помощи БВС осуществляет непре­
рывный мониторинг обстановки и управляет действиями АК РЛДН. Оператив­
но-тактическая обстановка непрерывно обновляется в базе данных БВС на ос­
нове информации от внешних и внутренних датчиков. При выводе из строя
какого-либо датчика (внешнего или внутреннего) АК РЛДН продолжает вы­
полнение боевой задачи при некотором снижении эффективности.
Ниже более подробно будут рассмотрены методы наведения, используемые в
АК РЛДН для управления истребителями, особенности функционирования систе­
мы наведения в различных режимах и принципы построения и особенности функ­
ционирования командных радиолиний управления.
5.2. Методы наведения самолетов на воздушные цели
Методы наведения самолетов с АК РЛДН на воздушные цели должны
обеспечивать формирование такой требуемой траектории, наведение по кото­
рой обеспечивает вывод ЛА к определенному времени в зону уверенного за­
хвата цели хотя бы одной из визирных систем (БРЛС, ОЭС, оптическим прице­
лом и т. д.) [1].
В связи с тем, что на этапе дальнего наведения самолет управляется по
курсу, высоте и скорости [6], различают и соответствующие методы наведения.
Методы наведения по высоте определяют формирование требуемых зна­
чений высоты Нт для любого момента времени, обеспечивающих желаемый
профиль полета в вертикальной плоскости.
Методы наведения по курсу предопределяют формирование требуемых
значений ψτ курса, обусловливающих желаемую траекторию наведения в гори­
зонтальной плоскости.
Методы наведения по скорости обусловливают вычисление требуемых
значений VT скорости, гарантирующих выход истребителя в район цели к за­
данному времени. При этом параметры рассогласования, определяющие алго­
ритмы траекторного управления самолетом в режиме ручного управления, фор­
мируются по правилам:
(5.1)
(5.2)
в которых ψ, Η и V - текущие значения курса, высоты и скорости.
5.2.1. Особенности дальнего наведения истребителей
Реализация этапа дальнего наведения с АК РЛДН при командном наведе­
нии одиночных истребителей на воздушные цели предусматривает формирова­
ние для каждого самолета проекции пространственной траектории в горизон­
тальной плоскости и профиля полета - проекции пространственной траектории
в вертикальной плоскости. При этом возникает ряд особенностей.
В частности, в процессе решения штурманской задачи [11], по результатам
которой определяются время перехвата и положение рубежа перехвата, на
АК РЛДН необходимо выбрать метод наведения, полусферу атаки (для метода
маневра), номер N программной скорости VN, номер η вида программы полета
на перехват или момент включения форсажа. При выборе этих параметров пе­
рехвата руководствуются следующими соображениями.
В качестве наиболее простого и надежного метода наведения в горизон­
тальной плоскости целесообразно использовать метод перехвата. Его приме­
нение при наведении целесообразно во всех случаях, когда нет жестких огра­
ничений на ракурс атаки цели. Метод погони (прямой метод) используется при
наведении в заднюю полусферу и соответствующих взаимных положениях ис­
требителя и цели либо в начале наведения, когда еще отсутствуют устойчивые
оценки параметров движения цели. Во всех остальных случаях применяется
метод маневра. При этом методе для истребителей старых типов, как правило,
назначается атака из задней полусферы.
При назначении программной скорости для метода перехвата выбирается
наименьшее из значений VN, удовлетворяющих неравенству
где апс некоторая константа, близкая, но несколько большая единицы [3, 7]. При этом
для высоты цели должно быть выполнено условие
причем минимальная и максимальная для данного типа истребителя высоты
перехватываемой цели зависят от программной скорости. При наведении мето­
дом маневра назначается минимальное значение VN, обеспечивающее возмож­
ность перехвата цели по скорости (с некоторым запасом) и высоте ее полета.
Для определения номера η вида программы для каждого значения N и
Η < Нц часто используют заранее рассчитанные и затабулированные значения
радиусов действия истребителя и соответствующие им времена полета, что
позволяет найти для каждого η требуемые дальности обнаружения цели,
сравнение которых с фактическим положением цели позволяет выбрать зна­
чения η [2, 3].
Формирование пространственной траектории самолета обеспечивается со­
ответствующими алгоритмами наведения. При этом алгоритм наведения в го­
ризонтальной плоскости решает следующие задачи [7]:
сведение временного баланса;
вывод истребителя в зону возможных атак;
вывод в заданную полусферу атаки;
вывод под заданным углом встречи с целью;
определение длины траектории до рубежа поражения.
Алгоритм наведения в вертикальной плоскости выполняет следующие за­
дачи:
сведение баланса по топливу;
сведение баланса по набору высоты и скорости;
оценку реализуемости траектории по топливу.
При расчете профиля полета используются характеристики полета по ба­
зовой программе набора высоты и скорости и характеристики схода с нее.
В расчетные формулы входят путь, время и топливо, необходимые для выпол­
нения рассматриваемого элемента профиля, а также секундные расходы топли­
ва при различных режимах работы двигателей. В алгоритмах также использу­
ются характеристики БРЛС истребителя и характеристики ракет.
Процесс формирования траектории полета истребителя итерационный.
В процессе формирования траектории алгоритмы наведения в вертикальной и
горизонтальной плоскостях постоянно взаимодействуют. Алгоритм наведения
в вертикальной плоскости пересылает в алгоритм наведения в горизонтальной
плоскости поправку в полетное время, учитывающую отличие средней скоро­
сти полета истребителя от балансной скорости и значение балансной скорости.
Алгоритм наведения в вертикальной плоскости получает от алгоритма наведе­
ния в горизонтальной плоскости длину траектории. Под балансной скоростью
Уб понимается скорость на том участке профиля полета, длину которого можно
изменять без изменения условий набора высоты и скорости. При разных про­
граммах полета и на разных этапах наведения в качестве балансной скорости
алгоритм может использовать крейсерскую скорость
программную ско­
рость VN или скорость атаки Va.
Расчет траектории начинается с определения параметров неустановив­
шихся участков профиля полета. На основании этих параметров вычисляется
поправка в полетное время, которая вместе со значением балансной скорости
передается в программы формирования траектории в горизонтальной плоско­
сти. Эти программы с учетом метода наведения, параметров движения цели и
истребителя, параметров зоны возможных атак и рекомендованных параметров
атаки строят горизонтальную проекцию траектории. В ходе построения воз­
можны ситуации, когда цель невозможно перехватить с использованием про­
граммной скорости. Эти ситуации выявляются при помощи алгоритмов гори­
зонтальной плоскости, что приводит к появлению признака нерешения по ско­
рости. После изменения параметров задача возвращается к алгоритму выбора
программной скорости и процесс формирования траектории повторяется. Если
подобрать удовлетворительные параметры не удается, боевой расчет КП (ПН)
оповещается о нерешении задачи по скорости.
Сформированная траектория оценивается на реализуемость по топливу и
набору высоты. Невозможность решения задачи по этим параметрам также
может изменить параметры наведения и вызвать повторное формирование тра­
ектории.
В результате решения штурманской задачи [11] определяются путь ис­
требителя и время полета до рубежа перехвата, направления и углы разворо­
тов, курс полета истребителя, путь и время разгона, положение точки вклю­
чения форсажа, длина балансного участка пути, положение точки вертикаль­
ного маневра.
Реализация летчиком сформированной на пункте управления пространст­
венной траектории имеет некоторые особенности.
На первом этапе наведения до прихода команды «Вертикаль» истребитель
выполняет полет в вертикальной плоскости по базовой программе набора вы­
соты и скорости в соответствии с заданным значением программной скорости и
командой «Форсаж». Разовые команды отображаются на индикаторе. Полет на
перехват по базовому профилю при ручном управлении летчик осуществляет
следующим способом. Если команда «Форсаж» поступает непосредственно по­
сле взлета, то это означает, что программа будет ближняя, и летчик на форсаже
набирает высоту разгона. Если же команда «Форсаж» сразу не поступает, то
программа дальняя или средняя. Летчик в этом случае на бесфорсажном режи­
ме набирает высоту, стремясь выйти на ее крейсерское значение. При приеме
команды «Форсаж» на участке бесфорсажного набора высоты до выхода на
крейсерскую высоту, что свидетельствует о формировании ПН для истребителя
средней программы, летчик включает форсаж и на форсажном режиме набира­
ет высоту разгона. Если при достижении крейсерской высоты команда
«Форсаж» не поступает, летчик переводит самолет в горизонтальный полет на
крейсерской высоте и скорости, поскольку программа получилась дальняя. В
момент поступления команды «Форсаж» летчик выполняет команду и на фор­
сажном режиме набирает высоту разгона. При любой программе полета после
выхода на высоту разгона летчик выполняет разгон до программной скорости.
После разгона до этой скорости он осуществляет набор высоты, соответствую­
щей данной программной скорости, и остается на этой высоте до прихода ко­
манды «Вертикаль». Следует отметить, что данная команда может поступить
до выхода на указанную высоту.
Второй этап наведения начинается после прихода команды «Вертикаль»
и ее вида (атака по усмотрению летчика, атака снизу, атака сверху). При этом
на борт выдается заданное значение скорости атаки Узад = Va. После этого лет­
чик осуществляет сход с базового профиля на высоту атаки цели.
5.2.2. Методы наведения в горизонтальной плоскости
Среди известных методов наведения истребителей в горизонтальной плос­
кости [3, 12] наибольшее применение находят метод маневра, метод перехвата
и прямой метод.
При прямом методе (метод погони) требуется все время совмещать про­
дольную ось истребителя с направлением на цель (рис. 5.2), где точки 0С и 0Ц
соответствуют положению истребителя и цели; Vc и Уц - скорости наводимого
самолета и цели;
- текущие координаты цели и самолета. Из
рис. 5.2 следует, что требуемый курс
(5.3)
где все координаты zu, zc и хц, хс формируются на основании измеренных в РЛС
дальностей Дц, Дс и азимутов (рц, (рс цели и самолета по правилу:
(5.4)
Преимуществами метода прямого наведения является его инвариант­
ность к дальности и высоте полета цели и самолета, простота информацион­
но-вычислительной системы и хорошее сопряжение со всеми методами само­
наведения.
При наведении на движущиеся ВЦ прямой метод в общем случае обес­
печивает полет самолета по криволинейной траектории (кривой погони). Если
перехват цели выполняется из задней полусферы (ЗПС), то кривизна траекто­
рии будет незначительной и наводимый самолет сможет выполнять маневры
преследования с допустимыми поперечными перегрузками. Если же перехват
осуществляется из передней полусферы (ППС), то на конечном участке
траектории ОУ все равно должен быть выведен в ЗПС (рис. 5.2). При этом
может возникнуть ситуация, когда выполнить такой разворот с допустимыми
перегрузками невозможно. В итоге либо возникнут недопустимо большие
ошибки наведения, либо наводимый самолет разрушится при движении по
требуемой траектории, отмеченной на рис. 5.2 точками 0С ,1,2,3,4,...
Рис. 5.2
Следует отметить, что наведение по криволинейным траекториям приво­
дит к уменьшению дальности действия системы наведения в целом и увеличе­
нию времени наведения. Однако наиболее значительным недостатком прямого
наведения является ограничение направлений перехвата движущихся ВЦ толь­
ко задней полусферой.
Метод маневра (метод прямой с разворотом) обеспечивает вывод истре­
бителя в зону обнаружения цели бортовой РЛС или ОЭС под заданным углом
ψκ на заданном расстоянии 0СК0ЦК (рис. 5.3), где точки 0СО и 0ЦО соответствуют
положению самолета и цели в начале дальнего наведения, в то время как 0СК и
0ЦК - в момент его окончания. Траектория наведения при этом методе состоит
из трех участков: отрезка прямой 0СОАЬ дуги с радиусом R и отрезка прямой
А20ск. Расчет этих участков выполняется по довольно сложным формулам, для
реализации которых необходимо оценивать дальности до цели и истребителя,
их азимуты и скорости. Кроме того, необходимо знать допустимые радиус раз­
ворота и диапазон углов ±ψκ, дальность рубежа захвата 0СК0ЦК и суммарное вре­
мя, затрачиваемое на вывод самолета в точку 0СК.
Достоинство метода - его хорошее сопряжение со всеми методами са­
монаведения и возможность использования как радиолокационных, так и опти-
Рис. 5.3
ко-электронных визирных систем. Последнее обусловлено тем, что истреби­
тель может быть выведен на рубеж захвата в ЗПС, в которой ОЭС имеют наи­
большую дальность захвата по факелу двигателя. Кроме того, данный метод
позволяет вывести истребитель в заданное относительно цели положение и тем
самым обеспечивает наибольшую эффективность применения оружия, а также
осуществить обход опасных или запретных для полетов зон воздушного про­
странства.
Недостатки метода - большое время, затрачиваемое на выход самолета
на рубеж захвата, большой расход топлива, что сокращает время на ведение
воздушного боя, ограничения на ракурсы перехвата, обусловленные необхо­
димостью вывода самолета в ЗПС, сложность расчетов траектории и ее вы­
полнения.
В ряде случаев может быть предусмотрен метод наведения, содержащий
два участка полета по дугам окружностей [3, 7].
Метод перехвата представляет собой разновидность метода параллельно­
го сближения [7]. Особенностью является то, что по методу параллельного
сближения наводится не сам истребитель, а некоторая фиктивная точка А, рас­
положенная по вектору скорости Vc на расстоянии Д3 захвата цели бортовой
визирной системой (рис. 5.4). Это означает, что в процессе дальнего наведения
прямая АОц перемещается параллельно самой себе. Такой прием обеспечивает
нахождение истребителя в точке 0СК на рубеже захвата Д3 в тот момент, когда
точка А «встретится» в упрежденной точке встречи 0ут с целью.
Используя координаты цели хц, zn и самолета хс, zc и учитывая, что упреж­
денная дальность Ду равна сумме Д3 и расстояния 0С0СК, пролетаемого истреби­
телем за время наведения tH, определим систему уравнений
Рис. 5.4
(5.5)
с тремя неизвестными ψτ, tH и Ду.
При получении (5.5) полагалось, что цель и истребитель движутся равно­
мерно и прямолинейно со скоростями V4 и Vc и курсовыми углами ψ4 и ψτ со­
ответственно. Решая эту систему при условии, что прямоугольные координаты
определяются по правилу (5.4), вычисляют ψτ, tH и Ду.
Достаточно просто решение системы (5.5) получается при условии, что
истребитель наводится на встречных либо догонных курсах. В такой ситуации
с учетом (5.4) из (5.5) можно получить [12]
(5.6)
где
;
(5.7)
Из (5.6) и (5.7) следует, что для реализации метода перехвата необходимо
оценивать дальности и азимуты цели и истребителя, а также скорости Vn и Vc и
курсовой угол цели \|/ц. Последнее требует достаточно длительного сопровож­
дения цели.
Достоинства метода перехвата:
высокая экономичность наведения, обусловленная наведением в упреж­
денную точку практически по прямолинейной траектории;
обеспечение заданного рубежа перехвата при любом направлении пере­
хвата.
Недостатки метода перехвата:
невозможность сопряжения с прямыми методами самонаведения при пе­
рехвате цели в ППС;
зависимость направления атаки цели от исходного положения цели и ис­
требителя и параметров их полета;
отсутствие фиксированного угла атаки в момент окончания дальнего на­
ведения.
Последнее оказывается неудобным для дальнейшего применения визир­
ных систем различной физической природы. Так, например, применение этого
метода делает затруднительным использование ОЭС, поскольку ее дальность
захвата в значительной степени зависит от ракурса перехвата [14].
5,2.3. Методы наведения по высоте
При перехвате воздушной цели траектория истребителя в вертикальной
плоскости связана с режимом его полета. Режим полета определяет значение
радиуса действия истребителя по запасу топлива и его среднюю скорость Vcp.
Чем больше Vcp, тем при прочих равных условиях меньше время перехвата и
глубина проникновения цели, но и тем меньше радиус действия истребителя. Поэтому режим полета задают таким образом, чтобы обеспечить максимум Vcp
при условии нахождения рубежа перехвата в области, достижимой по запасу
топлива.
Нахождение оптимального режима полета истребителя является сложной
задачей. В связи с этим на практике используют субоптимальные типовые ре­
жимы полета на перехват. Эти режимы характеризуются программами набора
высоты Η и скорости V, программами работы двигателя и профилями полета.
В основе типовых вариантов (программ) набора высоты и скорости полета
лежат так называемые базовые программы, которые близки к энергетически
оптимальным программам, обеспечивающим минимум времени, пути и расхо­
да топлива [3, 7]. Базовая программа состоит из участков, на которых выдер­
живается постоянное значение скорости полета и высоты. Она задается в виде
зависимости скорости или числа Μ от высоты полета.
При планировании перехвата значение высоты атаки На задается, а на ско­
рость ее выполнения Va налагаются определенные ограничения. Базовая про­
грамма не содержит участка, необходимого для выхода на заданные значения На
и Va, и поэтому в большинстве случаев не обеспечивает выведение истребителя
на заданные для выполнения атаки значения высоты и скорости, что при
Va < Vmax требует выполнения «сходов» с программы. В принципе эти сходы
можно выполнять маневром «горка», т. е. с потерей скорости, но подобные ма­
невры при перехвате нежелательны. В то же время при На, на несколько кило­
метров меньших высоты потолка самолета Нп, выполнение схода при некото­
рой постоянной скорости, называемой программной скоростью VN, не приво­
дит к существенным потерям во времени или расходе топлива. В этом случае
сход с базовой программы проводится при скорости VN > Va, дальнейший по­
лет осуществляется при постоянном значении этой скорости и только на за­
ключительном этапе перехвата выполняется маневр выхода на высоту и на
скорость атаки. На практике ограничиваются максимум четырьмя разными
значениями VN, наибольшее из которых близко к Vmax, а наименьшее - к крей­
серской скорости VKp [3,7]. В зависимости от условий перехвата выбирают одно
из этих значений и соответствующее ему значение Va.
В некоторых случаях (например, при высоте На, существенно отличаю­
щейся от Нп) сход с базовой программы проводится при V « Va и дальнейший
полет на перехват, заканчивающийся выходом на Η = На, осуществляется на
этой скорости.
При дальнем наведении радиус действия истребителя, т. е. расстояние от
аэродрома взлета до рубежа, предельного по запасу топлива, зависит от высоты
атаки цели На, используемых программ набора высоты и скорости VN, а также
от режима работы двигателя. Для упрощения решения задачи перехвата ис­
пользуют несколько типовых видов программ полета, под которыми пони­
мают совокупность программ набора скорости и высоты и программ работы
двигателя. Они определяют логику включения форсажа и наличие или отсутст­
вие установившихся (балансных) участков полета. Обычно применяются сле­
дующие типовые программы [3, 7], обозначаемые буквой п: ближняя или фор­
сажная (п = 1), средняя или комбинированная (n = 2) и дальняя или крейсерская
(n = 3). Ближняя программа обеспечивает полет с максимальной скороподъем­
ностью, средняя - минимум проникновения цели при заданном остатке топли­
ва, дальняя - полет с минимальным расходом топлива.
Ближняя программа реализуется при форсажном режиме работы двигате­
ля. Максимальный радиус действия при ближней программе получается при
включения форсажа с момента взлета. При этом за счет работы двигателя на
полном форсаже обеспечивается наискорейший выход на максимально допус­
тимое значение скорости полета VN = Vmax и расходуется весь запас топлива, за
исключением топлива, необходимого для возвращения на аэродром посадки.
При использовании средней программы форсаж включается в некоторой
регулируемой точке участка набора высоты. Полет на участке дозвукового на­
бора высоты или его части выполняется при работе двигателя на максимале.
Это приводит к увеличению радиуса действия самолета по сравнению
с ближней программой, поскольку расход топлива, затрачиваемый на кило­
метр пути, для бесфорсажных режимов работы двигателя существенно мень­
ше, чем для форсажных. Средней программе соответствуют два балансных
участка. Соотношение продолжительностей полета на первом (при V = VKp) и
втором (при V = VN) участках может быть найдено из условия расхода всего
топлива, выделенного на выполнение перехвата и привода на аэродром по­
садки, что обеспечивает минимум глубины проникновения цели. Максималь­
ный радиус действия при средней программе соответствует случаю включе­
ния форсажа в момент достижения самолетом крейсерской высоты Нкр. Сред­
нюю программу часто называют программой с регулированием точки
включения форсажа.
Дальняя программа характеризуется наличием установившегося участка
полета на крейсерской высоте при соответствующем дроссельном режиме ра­
боты двигателя. Увеличение радиуса действия достигается за счет роста длины
участка крейсерского полета. Максимальный радиус действия при дальней
программе будет при наиболее позднем включении форсажа, когда время, ос­
тавшееся до конца наведения, равно времени, требуемому на набор высоты
Η = На и скорости V = VN > VKp [3, 7].
Рубеж перехвата целей зависит не только от программы работы двигателя,
по существу определяющей момент включения двигателя, но и от профиля по­
лета, характеризующего зависимость высоты полета от пути или времени. Как
правило используются типовые профили полета двух типов: по потолкам и
на высоте атаки цели.
На рис. 5.5 приведены профили полета для типовых видов программ, со­
ответствующих η = 1, 2, 3 [3,7]. Профиль полета по потолкам предусматрива­
ет набор высоты и скорости до VN, продолжение набора высоты с этой скоро­
стью на полном форсаже до момента достижения самолетом базовой высоты
HN (оптимальной для полета на дальность при данной скорости), полет на этой
высоте и снижение на V = VN до Η = На, выполняемое по специальной команде
«Вертикаль». Такой профиль полета обеспечивает превосходство истребителя
над целью по запасу полной энергии и позволяет весьма существенно увели­
чить радиусы действия истребителя, особенно на сверхзвуковых скоростях и
при малых высотах атаки. Кроме того, эти профили вплоть до момента выдачи
на борт истребителя команды «Вертикаль» на выполнение маневра выхода на
На позволяют истребителю выполнять наивыгоднейший по расходу топлива
полет независимо от фактической высоты цели, которая может измеряться с
большими ошибками и меняться из-за ее маневра. Недостатком рассматривае­
мого профиля по сравнению с режимом полета на Η = На является усложнение
процедуры пилотирования на этапе маневра снижения для выхода в атаку.
При профиле полета на высоте атаки цели осуществляется набор высоты
На, разгон до скорости Va и горизонтальный установившийся полет при Η = На,
Рис. 5.5
V = Va при дроссельном режиме работы двигателя. Данный профиль может
оказаться рациональным при применении истребителей вблизи линии фронта,
что затруднит их обнаружение наземными РЛС противника. При этом сход с
базовой программы набора, выполняемый по команде «Вертикаль», проводится
при достижении истребителем высоты Η = На.
Следует отметить, что указанные профили полета состоят из типовых уча­
стков полета, при этом профиль полета может иметь этапы неустановившего­
ся и установившегося полетов.
Этапы установившегося полета называют балансными, поскольку путем
изменения их продолжительности обеспечивается временной баланс, т. е. ра­
венство времени полета истребителя и цели до точки встречи. При полете по
потолкам эти этапы выполняются на режимах с минимальными при данных
значениях скоростей расходами топлива.
Весь профиль полета на перехват и привод на аэродром посадки может
быть разбит на 11 участков, показанных на рис. 5.6 [3, 7]. Из них три участка
являются балансными. Первый балансный участок (крейсерский) длиной Дкр
проходит на высоте Η = Нкр со скоростью V = VKp, второй балансный участок
(программный) длиной Дн на высоте Η = HN со скоростью V=VN и третий ба­
лансный участок на приводе длиной Дпр - на высоте
со скоростью
Участки первого разгона и набора (j = 0 и j = 1) могут выполняться как на
форсаже, так и без него. На участке второго разгона (j = 3) скорость самолета
Рис. 5.6
возрастает от VKp до VN, а на участке j = 4 (второй набор) при постоянной ско­
рости VN достигается высота HN. При выходе на На и Va (j = 6) производится
снижение вначале с постоянной скоростью, а затем с торможением. При выхо­
де на высоты, близкие к статическому потолку или превышающие его, переход
на На и Va осуществляется маневром «горка» с потерей скорости. На приводе
(j = 8 - 10) после торможения может проводиться либо набор высоты при
V = VKp с На на Нкр (при На < Нкр), либо снижение при Vnp = const с На на Нкр. Как
в том, так и в другом случае после завершения балансного участка выполняется
снижение при Vnp = const на скорость Vnoc и высоту Нпос захода на посадку.
Разбиение профиля полета на указанные на рисунке участки позволяет затабулировать характеристики (время, путь и расход топлива) неустановивших­
ся по высоте или скорости участков полета, что необходимо для определения
возможности и параметров перехвата.
5.3. Координированное наведение
групп летательных аппаратов
Координированное наведение имеет место при одновременном наведении
группы истребителей на воздушные и особенно групповые цели. Координация
процедур наведения различных групп наводимых ЛА на цель должна обеспе­
чить их одновременный вывод в заданные районы относительно цели на задан­
ные расстояния и под заданными углами к траектории движения поражаемых
объектов [9, 15]. При этом целесообразно обеспечивать вывод наводимых
групп ЛА с различных сторон. Наиболее приемлемым способом координиро­
ванного наведения считается наведение трех групп истребителей, одна из кото­
рых выводится в зону атаки под ракурсом, близким к нулю.
Один из возможных вариантов координированного наведения трех групп
истребителей на групповую цель с использованием маневра «Клещи» иллюст­
рирует рис. 5.7.
Рис. 5.7
На этом рисунке:
- командир объединенной группы,
- ко­
мандир группы,
- самолеты группы,
самолеты цели, χ - точки пере­
хвата.
Задача координированного наведения может быть решена с различной
степенью автоматизации. При максимальной степени автоматизации офицер
боевого управления (штурман) указывает только цель и номера координируемых
каналов управления. При этом задача решается по одной и той же цели (голов­
ной цели группы) с одинаковым временем перехвата.
При минимальной степени автоматизации штурман должен выполнить
следующие операции:
определить опорный канал управления, относительно координат и време­
ни встречи которого будут задаваться значения этих параметров по остальным
координируемым каналам;
ввести значение угла встречи по координируемым каналам и задать поло­
жение точек встречи и время выхода в них для других истребителей, используя
положение рубежа перехвата и время наведения истребителя в опорном канале.
В качестве опорного канала управления целесообразно выбирать канал,
результаты наведения истребителя в котором меньше зависят от маневра цели.
Для обеспечения максимальной эффективности атаки групповой цели не­
сколькими истребителями (группами) целесообразно вывести истребители на
линию движения цели в район, удаленный от расчетной точки встречи с ней на
некоторое расстояние Д0. На этом пути командир группы или командир объе­
диненной группы истребителей должен обеспечить корректировку строя ис­
требителей перед их выходом в атаку (рис. 5.7), дать команду фланговым ис­
требителям выполнить маневр взятия цели «в клещи», определить рациональ­
ный порядок включения БРЛС истребителями и обеспечить руководство
выполнения ими атаки.
Для того чтобы сформировать рассматриваемую ударную группу истреби­
телей, необходимо заблаговременно иметь информацию о цели от РЛС. Чем
больше будет дальность обнаружения цели и, соответственно, время наведе­
ния, тем меньше окажется относительная потеря в рубеже ее перехвата, вызы­
ваемая выведением истребителей на противокурс цели для обеспечения макси­
мальной эффективности атаки. Напротив, при малом значении дальности обна­
ружения цели относительно истребителей, что обычно имеет место при
автономных действиях поисково-ударной и ударной групп истребителей, обес­
печение предварительного вывода ударной группы на противокурс цели при­
водит к сильному увеличению времени наведения, а значит, и к потере в рубе­
же перехвата, и в ряде случаев практически оказывается невозможным. Это
приводит к снижению эффективности дальнего ракетного боя истребителей,
так как на выполнение маневра «клещи» (точнее, «дальней клешни») при атаке
под большими ракурсами времени уже не хватает. При этом цель имеет воз­
можность выполнить маневр, «ослепляющий» БРЛС истребителей за счет по­
падания в зоны режекции.
Необходимость группирования информации о воздушных целях вызвана
следующими причинами. Средства воздушного нападения обычно применя­
ются группами, состав которых обусловлен необходимостью повышения
эффективности выполнения поставленных перед ними задач и противодейст­
вия атакам истребителей. Назначение воздействий по таким группам одиноч­
ными истребителями неэффективно и может привести к поражению истреби­
телей, а не самолетов противника. Поэтому важно выявлять тактические
группы, объединенные единством поставленных перед ними задач, т. е. обес­
печивать тактическое группирование целей. Следует также иметь в виду, что
реализация тактического группирования позволяет не только уменьшить чис­
ло объектов, подлежащих отображению, но и обеспечить устойчивое их со­
провождение и возможность организации координированных действий ис­
требителей по этим группам.
Группирование целесообразно проводить так, чтобы, с одной стороны,
минимизировать среднее расстояние гср между самолетами в группе, а с другой
стороны, максимизировать среднее расстояние RcP между группами [10]. Этот
векторный критерий можно привести к скалярному виду, если обеспечить
минимум отношений т\ = Γ^/ϋφ. Заметим, что под термином «расстояние»
здесь понимается расстояние между самолетами не в обычном пространстве, а
в пространстве информативных параметров (i == 1,..,n), к которым относятся не
только координаты объектов, но и параметры (курс, скорость) их движения, а
также некоторые признаки («свой», «чужой» и т. п.). Кроме того, важно, чтобы
при разделении на группы глубина образованных групп находилась в соответ­
ствии с возможностью одновременного сопровождения входящих в них само­
летов бортовыми РЛС атакующих их истребителей.
Принцип автоматического решения рассматриваемой задачи основан на
упорядоченном переборе различных вариантов разбиения целей на группы для
отыскания варианта, обеспечивающего выполнение условия qi η2 = min, где qi весовые коэффициенты.
Для сокращения числа переборов целесообразно задание с возможно­
стью внесения поправок боевым расчетом минимального расстояния между
группами Rmini и максимального расстояния rmaxi между самолетами в этих
группах. Отметим, что при ^ > rmaxi самолеты считаются заведомо не принад­
лежащими к одной группе, а при хх < Rmini принадлежащими. Если полагать
Rmini= fmax = Γοϊ = const, TO задача решается наиболее просто, поскольку сводит­
ся к методу формирования групп путем стробирования. В этом случае к одной
группе относятся самолеты, расстояние между которыми меньше строба, за­
данного значением roi. Однако тактически группы целей могут иметь различ­
ную конфигурацию, что при наличии ошибок в радиолокационных измерениях
приведет к значительному увеличению ошибок группирования и вызываемой
ими нестабильности состава сформированных групп. Поэтому метод стробиро­
вания целесообразно использовать лишь на борту двухместных истребителей
при условии, что значения rGi для каждой выделенной оператором визуально
группы будут заданы в соответствии с конфигурацией группы. При этом кон­
троль за составом группы и расчет параметров ее движения должны осуществ­
ляться автоматически.
Информация о группах своих истребителей также группируется, но это за­
дача более простая, так как известен и численный состав группы истребителей,
и целесообразный размер строба группирования.
При выходе истребителя в боевое соприкосновение в режиме бортового
наведения на его борт выдается только регулярная координатная поддержка по
сопровождаемой цели. Сближение с целью и последующая атака выполняются
истребителем самостоятельно.
Режим бортового поиска при выходе истребителя в боевое соприкосно­
вение назначается с АК РЛДН или самостоятельно выбирается истребите­
лем в случае прекращения поступления команд (>60 с) или их нерегулярной
выдачи.
5.4. Полуавтономные действия
наводимых летательных аппаратов
Весьма перспективным способом расширения боевых возможностей сис­
тем наведения является использование так называемых полуавтономных дей­
ствий.
Под полуавтономными действиями понимаются такие способы примене­
ния одиночных групп перехватчиков, при которых задачи поиска, наведения и
координации их действий решаются бортовыми средствами наводимых ЛА по
прерывистой или разовой информации, поступающей от АК РЛДН.
При обеспечении ПАД с АК РЛДН предполагается использовать следую­
щие способы вывода наводимых ЛА в боевое соприкосновение с целью [3, 7]:
командное наведение с координатной поддержкой;
бортовое управление (БУ), включающее бортовой поиск (БП) и бортовое
наведение (БН).
В зависимости от качества информации о воздушных целях и своих ЛА
каждый из упомянутых способов может быть применен самостоятельно или в
любой последовательности, необходимость которой может выявиться в про­
цессе отражения налета.
Следует отметить, что групповые действия (ГД) обеспечиваются исполь­
зованием на борту аппаратуры автоматизированного обмена информацией ме­
жду самолетами группы и ее отображения на специальных индикаторах. Это
позволяет использовать в АК РЛДН один канал наведения для управления
группой, передавая команды через командную радиолинию управления на борт
ведущего группы. В свою очередь ведущий самостоятельно управляет своей
группой, осуществляя координацию действий всех ее экипажей. Однако при
этом лица боевого расчета (ЛБР) на АК РЛДН должны быть готовы к оказанию
помощи ведущему в части «голосовых» целеуказаний о местонахождении са­
молетов группы при их потере и др.
Возможность осуществления полуавтономных действий наводимых ЛА
обеспечивается их бортовой вычислительной системой, которая по регулярной
и прерывистой информации о цели, передаваемой по КРУ АК РЛДН, может
самостоятельно решать задачу управления самолетом для вывода в район об­
наружения и атаки воздушного противника. Такой способ вывода перехватчика
в боевое соприкосновение с противником, при котором на борт истребителя
передается информация о координатах и параметрах движения цели (группы
целей), обычно называется режимом бортового управления.
Истребители могут также управляться в режиме командное наведение с
координатной поддержкой, при котором на борт, помимо обычных команд на­
ведения, периодически передается информация о цели (группе целей).
При работе в обоих режимах в случае прекращения поступления на борт
информации от КРУ, обусловленного отказом тракта КРУ, выходом из строя
управляющей АСУ и др., истребитель автоматически переключается на борто­
вое управление (бортовой поиск), используя принятые ранее и запомненные
координаты, т. е. продолжает автономный перехват назначенной цели, хотя и с
некоторым снижением эффективности. В случае восстановления работоспо­
собности тракта КРУ имеется возможность «вернуться» к управлению по ко­
мандам или информации КРУ.
Командное наведение с координатной поддержкой в виде прямоугольных
координат х, у, h и составляющих скорости Vx и Vy цели является основным
способом вывода ударных групп перехватчиков, находящихся в поле команд
АК РЛДН, в боевое соприкосновение с целями. Координатная поддержка пере­
дается на борт перехватчика один раз в 60 с, а в остальное время передаются
команды наведения.
Бортовой поиск применяется в случаях:
выбора этого способа на пункте наведения (ПН) или смены способа выхо­
да в боевое соприкосновение в процессе управления;
выхода истребителя (группы) из поля команд и радиолокационного поля ПН;
отсутствия информации о цели.
Смысл бортового поиска состоит в экстраполяции положения цели на те­
кущий момент времени по последним данным координатной поддержки.
Бортовой поиск характерен также для действий поисковых групп. В такой
ситуации поиск цели обеспечивается бортовыми РЛС группы в боевом порядке,
реализующем наибольшую зону просматриваемого пространства и необходимое
взаимное перекрытие зон обзора РЛС.
Обнаружив цель, ведущий группы организует ее боевые действия по унич­
тожению цели. Информация о цели может передаваться на ПН по каналу голо­
совой связи либо относительно местонахождения перехватчика, либо отно­
сительно условной точки.
При бортовом наведении управление наводимыми летательными аппара­
тами осуществляется по данным их собственных информационных систем, од­
нако периодически на них передается информация координатной поддержки.
При организации ПАД необходимо определять момент перехода от ко­
мандного наведения к бортовому управлению и осуществлять выбор целей для
передачи ведущему группы.
Алгоритм определения момента перехода от командного наведения к
бортовому управлению вырабатывает рекомендации для офицеров боевого
управления (штурманов наведения), осуществляющих наведение в режиме ко­
мандного наведения с координатной поддержкой истребителей (групп истре­
бителей) типа СУ-27, МиГ-3 [3], на перевод их в режим БП, который является
одной из составных частей режима «Бортовое управление».
Авиационные комплексы радиолокационного дозора и наведения
Алгоритм состоит из двух частей.
В первой части проводится оценка вероятности захвата цели (группы це­
лей) истребителем при переводе его в режим БП с текущего момента времени.
Во второй части проводится выработка признака целесообразности пе­
рехода истребителя в режим БП при атаке им заданной группы целей.
Оценка вероятности захвата цели в режиме БП проводится в предположе­
нии равномерного и прямолинейного движения истребителя заданным курсом,
с заданной скоростью и на заданной высоте. При оценке вероятности учитыва­
ются ошибки трассовой информации по курсу, скорости и высоте. Ошибки
измерения в горизонтальной плоскости не учитываются вследствие незначи­
тельного их влияния на конечный результат. При определении искомой веро­
ятности учитывается возможный маневр цели по курсу и скорости в заданном
диапазоне.
Оценка проводится для самого неблагоприятного случая, когда маневр по
курсу и скорости происходит в момент получения трассовой информации о це­
ли. Изменения координат за счет маневра принимаются равномерно распреде­
ленной случайной величиной, меняющейся в заданных диапазонах. Искомая
оценка усредняется по всем возможным маневрам по скорости и курсу из за­
данных диапазонов.
В алгоритме проводится оценка времени, начиная с которого возможен
захват цели при условии равномерного и прямолинейного ее движения (опре­
деляется тем самым момент времени, с которого целесообразно проводить
оценки).
Оценка вероятности захвата в каждый момент времени проводится для це­
ли, находящейся в узловых точках зоны возможного ее положения в соответст­
вующий момент времени.
Зона возможного положения цели определяется из условия, что цели мо­
гут двигаться с курсами и скоростями из заданного диапазона. Полученное зна­
чение оценки вероятности корректируется с учетом ошибок измерения трассо­
вой информации и взаимного положения истребителя и цели.
После вычисления искомой вероятности Ρ формируется рекомендация
ЛБР по поводу целесообразности предписания данному ЛА режима БП. Реко­
мендация вырабатывается путем сравнения полученной оценки с допустимыми
значениями вероятности захвата Рдоп. В случае, если полученное значение ве­
роятности Ρ больше РдОП, выдается рекомендация на перевод данной группы
истребителей в режим БП, если полученное значение Ρ меньше Рдош то реко­
мендация не выдается.
Алгоритм автоматического отбора целей предназначен для периодиче­
ского отбора целей по каждому каналу управления. В результате его работы
формируется таблица отобранных целей по всем каналам управления. В пер­
вую очередь алгоритм отбора включает в таблицу цели, на которые назначена
данная группа истребителей
том случае, когда
Автоматический отбор проводится только в
- максимальное число целей, отбираемых
для одного канала управления. Поскольку отбор целей проводится для отобра­
жения информации о них на индикаторе тактической обстановки (ИТО) истре­
бителя, то отбор выполняется в два этапа:
из всех целей отбираются только те, которые принадлежат физическому
пространству, отображаемому на ИТО (первичный отбор) включается отбор целей внутри этого пространства, если их число
(вторичный отбор).
Первичный отбор осуществляется по попаданию целей в строб отбора,
центр которого выбирается таким образом, чтобы отображать на ИТО как
можно больший объем пространства в передней полусфере. Это необходимо
для своевременного принятия решений экипажем ИП по отображаемой инфор­
мации.
5.5. Принципы построения и особенности
функционирования командных радиолиний
5.5.1. Общие сведения о командных радиолиниях управления
Среди составных частей системы наведения на базе АК РЛДН важное ме­
сто занимает командная радиолиния управления, посредством которой и осу­
ществляется передача команд различного назначения на борт истребителя и их
воспроизведение для решения задач траекторного управления, информацион­
ного обеспечения и управления аппаратурой наводимого ЛА.
В общем случае на борт перехватчика передаются плавные (функциональ­
ные) и разовые команды. В составе плавных команд, значения которых изме­
няются в процессе наведения, обычно передают требуемый курс
требуе­
мую скорость VT наводимого ЛА, скорость сближения VC6, дальность до цели
Дц, высоту полета Н, азимут (раз и угол места φεν цели, координаты перехватчи­
ка хп, уп (цели хц, уц ) и ряд других.
Среди разовых команд различают информационные, управляющие и
взаимодействия.
Информационные команды дают летчику представление о воздушной и
наземной обстановке. К таким командам относятся разовая дальность до цели
(100, 60 км); полусфера атаки (ППС, ЗПС); перенацеливание; признак способа
выхода в боевое соприкосновение (КН, БН, БП); признак государственной
принадлежности; признак поражаемого объекта (тип наземной цели, одиноч­
ная, групповая); число своих самолетов в группе и т. д.
К управляющим командам относятся форсаж, разворот (вправо, прямо,
влево); включение РЛС на излучение; номер программы полета в вертикальной
плоскости, привод на аэродром и др.
Команды взаимодействия передаются на борт наводимого ЛА перед пере­
ходом в зону ответственности другого пункта наведения. К ним относятся но­
мер пункта наведения, номер новой волны, номер нового шифра и т. д.
В зависимости от конкретной ситуации вся передаваемая информация
формируется в виде наборов команд, которые и передаются на борт управляе­
мого объекта. В общем случае различные наборы команд используются для
командного наведения на воздушные цели, для обеспечения координатной
поддержки, привода на аэродром, передачи информации цели о тактической
обстановке при Π АД, передачи команд взаимодействия.
Набор любой команды формируется в виде цикла, содержащего несколько
подциклов, в число которых могут входить сигналы кадровой (цикловой) и по­
словной (подцикловой) синхронизации, адрес (шифр) ЛА, для которого переда­
ется информация, признак номера команды и значения передаваемых команд в
определенной последовательности.
Состав командной радиолинии управления иллюстрирует структурная
схема, показанная на рис. 5.8.
Рис. 5.8
В составе КРУ выделяют передающую часть, входящую в аппаратуру
АК РЛДН, и приемную часть в аппаратуре наводимого ЛА.
В передающей части под действием команд Kyi (i = 1,...,η), где η - число
команд, осуществляется их шифрация, результатом которой является формиро­
вание так называемых поднесущих колебаний, которыми собственно и моду­
лируются излучаемые передатчиком СВЧ-сигналы.
Приемная установка КРУ содержит приемник, осуществляющий прием и
демодуляцию высокочастотного сигнала, и дешифратор (декодирующее уст­
ройство), разделяющий принятые импульсные кодовые сигналы по разным ка­
налам в соответствии с видами используемой селекции.
В системах командного радиоуправления самолетами входные команды,
как правило, являются цифровыми. Поэтому одной из основных задач, возла-
гаемых на шифратор, является организация обмена данными с ЦВМ для прие­
ма входных команд. Так как с АК РЛДН могут одновременно наводиться не­
сколько самолетов (группа самолетов), то на каждый самолет периодически в
течение ограниченного промежутка времени передаются различные наборы
команд, состав которых изменяется в зависимости от тактической ситуации. В
шифраторе формируются непрерывные или импульсные поднесущие колеба­
ния, которые модулируются первичным цифровым кодом, отображающим
функциональные и разовые команды К уЬ Ку2, ..., Куп (рис. 5.8). Затем каждому
символу (например, единице и нулю) ставится в соответствие поднесущее ко­
лебание, удобное для модуляции СВЧ-колебаний передатчика.
Для решения таких задач целесообразно использование кодоимпулъсной
модуляции (КИМ). Обычно в КРУ с КИМ используется временное разделение
каналов, при котором команды передаются в определенной очередности во
времени. Для реализации временного разделения каналов в шифраторе форми­
руются и вводятся в состав передаваемых команд синхронизирующие сигналы,
отображаемые специальными поднесущими колебаниями. Поднесущие коле­
бания поступают в передатчик, излучаемые сигналы которого могут быть как
узкополосными, так и широкополосными. Узкополосные радиосигналы полу­
чаются при амплитудной, частотной и фазовой модуляции. Для получения ши­
рокополосных (сложных) сигналов в передатчике КРУ используется обычно
фазокодовая манипуляция импульсными поднесущими колебаниями, пред­
ставляющими собой чаще всего М-последовательности (коды Баркера).
Разделение сигналов синхронизации и сигналов управления в приемной
части КРУ может осуществляться в соответствии с принципами частотной, вре­
менной и структурной селекции. Эта задача решается в дешифраторе (декоди­
рующем устройстве), где, кроме того, проводятся демодуляция и преобразование
поднесущих колебаний в выходные команды, являющиеся цифровыми аналога­
ми команд Kyi (рис. 5.8), а также отделение полезных сигналов от помех.
Функциональные команды, предназначенные для управления самолетом,
целеуказания бортовой РЛС и летчику, а также разовые команды с выхода де­
шифратора подаются в бортовую ЦВМ, БРЛС и систему индикации через циф­
ровую магистраль. Предварительно в выходном устройстве дешифратора циф­
ровые коды приводятся к стандартной форме и далее выдаются потребителям.
В условиях ведения радиоэлектронной борьбы КРУ должна обеспечивать
высокую помехоустойчивость. Наряду с использованием широкополосных
сигналов в КРУ может применяться помехоустойчивое кодирование. В этом
случае цифровая последовательность данных, состоящая из совокупности ко­
довых слов, поступает из шифратора в кодер. В последнем каждое поступив­
шее кодовое слово преобразуется в новое, более длинное кодовое слово с
большей, чем у исходного слова шифратора, избыточностью. В качестве
помехоустойчивых кодовых слов наиболее часто используются коды Хэмминга, БЧХ, Рида-Соломона, каскадные коды.
Помехоустойчивое кодовое слово после прохождения передающего и при­
емного трактов подается в декодер. Так как в радиоканале возникают различного
рода помехи, то символы принятого кодового слова не всегда совпадают с сим­
волами кодового слова кодера. Декодер использует избыточность передаваемого
кодового слова для исправления ошибок в принятом слове и формирования
оценки кодового слова шифратора. Если все ошибки исправлены, то оценка ко­
дового слова в дешифраторе совпадает с исходным кодовым словом шифратора.
На рис. 5.8 кодер и декодер изображены пунктирными линиями, показывающи­
ми, что они структурно входят в состав шифратора и дешифратора. В шифраторе
кодер стоит перед модулятором поднесущих колебаний, а в дешифраторе деко­
дер располагается сразу же после демодулятора поднесущих колебаний.
Кроме применения сложных корректирующих кодов, исправляющих паке­
ты ошибок, возможно использование так называемого перемежения [4] инфор­
мационной последовательности цифровых кодов шифратора в сочетании с про­
стыми корректирующими кодами, исправляющими в основном одиночные
ошибки. Для этого осуществляется разнесение ошибок пакета по различным
кодам путем переупорядочивания символов при помощи перемежителя, уста­
навливаемого между кодером и модулятором поднесущих колебаний шифра­
тора. Перемежитель (именуемый также интерливером) изменяет в соответст­
вии с определенным правилом, известным на приемной стороне КРУ, порядок
следования поступающей на его вход цифровой последовательности. Деперемежитель (деинтерливер), находящийся между демодулятором поднесущих ко­
лебаний, формирующим цифровую последовательность данных, и декодером,
проводит обратную операцию и восстанавливает исходную последователь­
ность помехоустойчивых кодовых слов. Иногда при кодировании передавае­
мых команд внешними и внутренними кодами перемежитель располагается
между внешними и внутренними кодерами, а деперемежитель - соответствен­
но между внутренними и внешними декодерами.
В КРУ возможно применение засекречивания передаваемых команд, вы­
полняемого по тем же процедурам, что и в технике радиосвязи.
В заключение отметим особенности построения КРУ и систем команд­
ного радиоуправления, появляющиеся при направленном излучении радио­
сигналов передатчика КРУ. Применение передающей антенны с узкой диа­
граммой направленности способствует повышению помехоустойчивости,
скрытности, облегчает решение задачи электромагнитной совместимости. Ори­
ентация передающей антенны КРУ в направлении объекта управления обеспе­
чивается различными способами.
В системах командного радиоуправления самолетами передающая антенна
КРУ может иметь очень узкую диаграмму направленности, что существенно
затрудняет процесс передачи команд, так как перед его началом надо убедиться
в возможности приема передаваемых команд наводимым самолетом. С этой
целью КРУ сопрягается с системой активного запроса-ответа и, в частности,
может иметь общую с ней передающую антенну. Для работы с конкретным са­
молетом САЗО получает целеуказание от ЭВМ пункта наведения. При нахож­
дении самолета в луче диаграммы направленности передающей антенны САЗО
посылает сигнал запроса. В случае приема этого сигнала на борту самолета от­
ветчик последнего формирует ответный сигнал, который свидетельствует о
возможности приема команд данным самолетом. Наряду с ответными сигнала­
ми по обратному каналу САЗО с самолета может передаваться различная ин­
формация. Принципы построения бортовой аппаратуры, совмещающей функ­
ции приема команд наведения и активного ответа, будут рассмотрены ниже.
5.5.2. Шифраторы и дешифраторы командной радиолинии
с кодоимпульсной модуляцией
В шифраторе КРУ с кодоимпульсной модуляцией аналоговая передавае­
мая команда Ку квантуется по уровню и каждому интервалу квантования обыч­
но ставится в соответствие двоичное число. Если передаваемая команда Ку
цифровая и определяется в двоичной системе счисления, то устройство кванто­
вания сигналов по уровню в шифраторе отсутствует.
Двоичное число отображается кодовой комбинацией, представляющей собой
набор элементарных сигналов и называемой кодовым словом. Каждый элементар­
ный сигнал, именуемый также символом, обозначает разряд двоичного числа. При
этом отличному от нуля и равному нулю разрядам соответствуют символы с раз­
ными качественными признаками. Полный набор кодовых слов образует двоич­
ный код, а число символов в кодовом слове определяет значность двоичного кода.
Простейшим является равномерный безызбыточный код. Он отличается тем,
что любое кодовое слово содержит одинаковое число символов (признак равно­
мерности), а для передачи всех интервалов квантования команды Ку используется
весь набор кодовых слов, определяемый значностью двоичного кода (признак бе­
зызбыточности). Применяются также избыточные коды, среди которых наиболее
известны коды с обнаружением ошибок и коды с исправлением ошибок.
Обработка кодового слова в приемной установке КРУ может быть посим­
вольной или осуществляться в целом. Технически более простая и чаще всего реа­
лизуемая посимвольная обработка, качество которой при большом отношении
энергий сигнала и помехи практически такое же, как и при обработке в целом.
При посимвольной обработке возможны частотная, временная и струк­
турная селекции разрядов кодового слова с использованием соответствующих
поднесущих колебаний для отображения различных символов.
Если применяется частотная селекция, то как единичным, так и нулевым
значениям каждого разряда соответствуют импульсы синусоидальных колеба­
ний с различными частотами.
При временной селекции качественные признаки символов, характери­
зующие одну и ту же величину в каждом разряде двоичного кода, идентичны, а
качественные признаки символов, отображающих единицу и нуль разряда, раз­
личны. В простейшем случае наличие единиц в двоичном коде определяется
одинаковыми по параметрам видеоимпульсами, а нуль характеризуется отсут­
ствием поднесущего колебания. Возможно также использование в качестве
поднесущих колебаний импульсов синусоидальных колебаний с одинаковыми
частотами и амплитудами. Однако разность начальных фаз этих синусоидаль­
ных колебаний, соответствующих нулю и единице, составляет 180°. При пере­
даче команд при помощи сложных сигналов в качестве поднесущих колебаний
применяют М-последовательности. Для отображения единичных и нулевых
значений используют одну и ту же последовательность видеоимпульсов мак­
симальной длины, но отличающуюся полярностью импульсов.
Среди возможных видов структурной селекции достаточно эффективной
является кодовая селекция. Эта селекция требует применять символы в виде
временных кодов.
Наименее громоздки и имеют приемлемые тактико-технические показатели
КРУ, в которых реализуется временная селекция разрядов двоичного кода. При
этом КРУ строятся обычно так, что осуществляется циклическая, т. е. периодиче­
ская передача каждого кодового слова. В таких КРУ период Τ передачи команд,
называемый часто кадром или циклом, делится на η частей, каждая из которых
образует канальный интервал. Число η здесь определяется числом каналов КРУ.
В начале каждого кадра формируется синхронизирующий сигнал, име­
нуемый кадровым словом. В приемной установке КРУ этот сигнал синхронизи­
рует работу распределителя (синхронизатора), который реализует временную
селекцию каналов и символов кодового слова в каждом канале. Иногда кадро­
вое слово используется в качестве адреса самолета, которому предназначена
передаваемая информация, и в этом случае оно именуется шифром. Наряду с
кадровой может осуществляться пословная синхронизация. Она повышает ка­
чество синхронизации распределителя в дешифраторе КРУ. Пословная син­
хронизация достигается путем передачи специального сигнала синхронизации
перед каждым кодовым словом.
Совокупность кодового слова и сигнала пословной синхронизации образу­
ет командную посылку, которая передается в течение одного канального ин­
тервала. Иногда дополнительные синхронизирующие сигналы могут формиро­
ваться не перед каждым очередным кодовым словом, а перед группой из не­
скольких слов. В такой ситуации говорят о сигналах групповой синхронизации.
Сигналы кадровой, групповой и пословной синхронизации - это кодовые ком­
бинации поднесущих колебаний. Чтобы синхронизация была эффективной,
часто используются сложные синхронизирующие сигналы: временные коды,
коды Баркера и т. д.
При необходимости наводить несколько управляемых объектов поу при
помощи одной передающей установки КРУ формируют поу кадров, каждый из
которых имеет длительность Т. С увеличением поу темп передачи команд на
каждый объект управления снижается. Для уменьшения времени, затрачивае­
мого на передачу всех команд одному объекту, целесообразно не последова­
тельное, а параллельное размещение каналов. Однако при этом требуется
большее число признаков (поднесущих колебаний) для символов, характери­
зующих разряды двоичных кодов. Так, для двухканальной КРУ с временной
селекцией и синусоидальными поднесущими колебаниями нужны четыре гене­
ратора с различными частотами
Одна из этих частот, например,
fni характеризует отличные от нуля разряды в первом и втором каналах, другая
fn2 - нулевой разряд в первом и отличный от нуля разряд во втором каналах, тре­
тья fn3 - отличный от нуля в первом и нулевой во втором каналах и четвертая
f„4 - нулевые разряды и в первом, и во втором каналах. При η > 2 более пригодным
может оказаться способ последовательно-параллельного размещения каналов.
Структурная схема шифратора при передаче цифровых команд на управ­
ляемые самолеты показана на рис. 5.9.
Рис. 5.9
Синхронизирующее устройство служит для синхронизации и управления
всеми процессами, протекающими в шифраторе. Оно определяет временную
структуру всего цикла команд, задавая временные интервалы для синхронизи­
рующих и командных посылок, отдельных команд и цикла в целом.
Штриховая линия, связывающая синхронизирующее устройство с генера­
тором поднесущих колебаний, указывает на возможность их образования пу­
тем преобразования синхронизирующих сигналов.
Необходимо подчеркнуть, что набор команд для каждого цикла формиру­
ется в ЦВМ, которая в состав шифратора не входит, и поэтому показана на
рис. 5.9 штриховой линией.
Для ввода в шифратор набора команд ЦВМ запрашивает устройство связи о
готовности шифратора к приему команд. Как правило, ввод данных происходит
последовательно во времени отдельными командами (подциклами). Поэтому при
наличии «свободного» места в регистре команд устройство связи выдает в ЦВМ
сигнал готовности к приему, в ответ на который из ЦВМ по цифровой магистра­
ли команда поступает в регистр. «Свободное» место в регистре появляется после
считывания из него к этому моменту времени первой команды из набора, запи­
санного в регистр в предыдущем цикле обмена. После приема последней коман­
ды, входящей в состав набора команд нового цикла, из ЦВМ выдается сигнал об
окончании ввода команд. Этот сигнал через устройство связи поступает в уст­
ройство синхронизации, которое запускает устройство управления считыванием
из регистра. При помощи этого устройства двоичные числа извлекаются из реги­
стра команд в заданной последовательности и подаются на модулятор, в котором
проводится отображение сигналов двоичного кода соответствующими колеба­
ниями. Как только первая команда выйдет из регистра, устройство связи сфор­
мирует для ЦВМ сигнал готовности к приему последующего набора команд.
Для любой функциональной команды Кш на выходе шифратора можно по­
лучить соотношение
(5.8)
где функция 5j(i) равна единице или нулю в зависимости от значения j-го разряда.
Максимальная величина Кшм команды Кш получается при условии, что
значения всех N разрядов двоичного кода отличны от нуля:
(5.9)
Необходимо отметить, что вследствие квантования передаваемой команды
по уровню зависимость Кш от Ку в установившемся режиме имеет вид ступен­
чатой кривой, а соотношение (5.8) справедливо лишь для тех значений Ку, ко­
торые при умножении на кпш, дают целочисленные значения.
Структурная схема дешифратора для варианта, когда набор команд выра­
батывается в ЦВМ АК РЛДН, представлена на рис. 5.10.
Сигнал UBX с приемника КРУ поступает на устройство разделения, при
помощи которого отделяются и направляются в разные каналы поднесущие ко­
лебания, соответствующие синхронизирующим и командным посылкам кодо­
граммы. Демодулятор ДМС выделяет сигналы кадровой и пословной синхро­
низации, при помощи которых обеспечивается коррекция синхронизирующего
устройства, если оказались нарушенными условия синхронной работы уст­
ройств синхронизации шифратора и дешифратора, т. е. если не совпадают во
времени одноименные посылки на передающей и приемной сторонах КРУ (при
Рис. 5.10
этом должно быть учтено время распространения радиосигнала между пунктом
управления и самолетом). При использовании в качестве поднесущих колеба­
ний импульсных временных кодов вместо демодулятора применяют декоди­
рующие устройства.
На выходе демодулятора команд ДМК (декодирующего устройства) обра­
зуются оценки разрядов двоичных цифровых команд, принятых по радиокана­
лу, которые поступают в дешифратор адреса, дешифратор номера набора ко­
манд (ДШР ННК) и оперативное запоминающее устройство (ОЗУ).
Использование ОЗУ дает возможность увеличить объем записываемой
информации и подготовить ее к выдаче в цифровую магистраль самолета в
стандартной форме. Дешифратор адреса (номера самолета) позволяет реагиро­
вать только на кодограммы, предназначенные для данного самолета, разрешая
или запрещая запуск устройства управления записью в ОЗУ от синхронизи­
рующего устройства. Данные об адресе самолета, как правило, размещаются в
кодограмме непосредственно после сигналов кадровой синхронизации.
Дешифратор номера набора команд, определяющий номер поступившего
набора, дает возможность определить состав и последовательность команд. В
совокупности с сигналами синхронизирующего устройства и дешифратора ад­
реса сигналы дешифратора набора команд определяют последовательность за­
писи и считывания команд из ОЗУ, которые поступают в формирователь вы­
ходных сигналов.
Формирователь выходного сигнала выдает информацию потребителям в
цифровой форме, «упакованную» в массивы стандартных слов. Необходимость
преобразования сигналов в стандартную форму объясняется тем, что стандарт
цифрового кода, принятый в самолетной цифровой магистрали, обычно не со­
ответствует структуре цифрового кода КРУ. При приеме команд взаимодейст­
вия, а также команд на включение и выключение форсажа формирователь вы­
ходных сигналов вырабатывает звуковые сигналы разной тональности для про­
слушивания в шлемофонах летчика. Кроме того, при переходе на новые
радиоданные (номер волны, номер самолета) формирователь создает соответст­
вующие сигналы для приемника и дешифратора адреса.
с
Литература
1. Авиационные комплексы радиолокационного дозора и наведения основных капиталистических
стран (обзор по материалам иностранной печати) / Под ред. Е.А. Федосова. - М.: НИЦ, 1990.
2. Андреевский В.В., Горощенко Л.Б. Управление полетом и эффективность авиационного ком­
плекса. - М . : Машиностроение, 1974.
3. Бабич В.К., Баханов Л.Е., Карпеев В.И. и др. Авиация ПВО России и научно-технический
прогресс: Боевые комплексы и системы вчера, сегодня, завтра / Под редакцией Е. А. Федосо­
в а . - М . : Дрофа, 2001.
4. Блейхут Р. Теория и практика кодов, контролирующих ошибки / Пер. с англ. - М.: Мир, 1986.
5. Верба B.C. Выбор трасс полета самолета. - Антенны, 2005, вып. 3.
6. Верба B.C., Щекотов А.И. Методика формирования данных о высоте и скорости полета
авиационного информационного средства в интересах увеличения продолжительности ра­
диолокационной разведки воздушного пространства. - Радиотехника, 2005, № 5.
7. Горощенко Л.Б., Максимович В.А. Автоматизация управления боевыми действиями истреби­
тельной авиации. - М.: МНИИПА, 1996.
8. Горощенко Л.Б. Расчет режимов полета, команд наведения и рубежей перехвата истребите­
лями воздушных целей. - Техника воздушного флота, 1999, № 1.
9. Горощенко Л.Б. Методы координированного наведения и атаки несколькими истребителями
группы самолетов противника. - Полет, 2000, № 6.
10. Горощенко Л.Б. Принципы планирования боевых действий истребителей в системах ПВО. Полет, 2000, № 3.
11. Горощенко Л.Б. Универсальный метод решения штурманских задач и наведения истребителя
на воздушную цель. - ВСРЭ. Сер. СОИУ, 1992, вып. 3.
12. Максимов М.В., Горгонов Г.И., Чернов B.C. Авиационные системы радиоуправления. - М.:
ВВИА им. проф. Н.Е. Жуковского, 1984.
13. Меркулов В.И., Дрогалин В.В., Ленин В.Н. и др. Авиационные системы радиоуправления. Т. 1.
Принципы построения систем радиоуправления. Основы синтеза и анализа / Под ред.
А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003.
14. Меркулов В.И., Дрогалин В.В., Богачев А.С и др. Авиационные системы радиоуправления.
Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Мерку­
лова. - М.: Радиотехника, 2003.
15. Федосов Е.А., Тюшов А.Л. Управление истребителями при групповых действиях с примене­
нием АК РЛДН. Проектирование и боевая эффективность авиационной и ракетной техники.
Вып. 8 / Под ред. Е.А. Федосова. - М.: Машиностроение, 1990.
ЧАСТЬ
2
МНОГОФУНКЦИОНАЛЬНЫЕ КОМПЛЕКСЫ
РАДИОЛОКАЦИОННОГО ДОЗОРА И НАВЕДЕНИЯ
НОВОГО ПОКОЛЕНИЯ
ГЛАВА 6
НАПРАВЛЕНИЯ ФОРМИРОВАНИЯ ТЕХНИЧЕСКОГО ОБЛИКА
АВИАЦИОННОГО КОМПЛЕКСА РАДИОЛОКАЦИОННОГО ДОЗОРА
И НАВЕДЕНИЯ НОВОГО ПОКОЛЕНИЯ
Решение сложной научно-технической задачи разработки перспективного
АК РЛДН требует огромных финансовых, материальных, людских и времен­
ных затрат. В связи с этим целесообразно выделить ряд принципиально важ­
ных направлений, определяющих облик перспективного АК РЛДН [17], учет
которых требует не только количественного улучшения показателей эффектив­
ности существующих АК РЛДН, но и принятия принципиально новых конст­
рукторских решений.
К этим направлениям, прежде всего, относятся:
учет состояния и тенденций развития способов ведения войн, всех видов
боевой техники, определяющих так называемые стратегические, оперативные и
тактические факторы;
экономичность, определяемая совокупностью затрат на разработку, боевое
применение и техническое обслуживание АК РЛДН;
технологичность, определяемая уровнем используемых информационных
технологий, элементной базой, глубиной и доступностью контроля техниче­
ского состояния, сложностью ремонта, а также возможностью улучшать пока­
затели эффективности без изменения принципов построения АК РЛДН;
научно-технические достижения страны-разработчика;
совокупность организационных мер по разработке и реализации облика
новой системы.
Взаимосвязь этих направлений в процессе разработки облика АК РЛДН
нового поколения показана на рис. 6.1.
Рис. 6.1
С учетом перечисленных направлений ниже будут кратко рассмотрены
основные направления, определяющие облик АК РЛДН нового поколения.
6.1. Стратегические, оперативные и тактические факторы,
влияющие на облик авиационного комплекса
радиолокационного дозора и наведения
Под обликом АК РЛДН понимают принципы построения, набор режимов
функционирования и датчиков информации, обеспечивающих его соответствие
целевому назначению [17-19]. Ниже приводится анализ стратегических, опера­
тивных и тактических факторов, влияющих на выбор облика АК РЛДН нового
поколения [22].
Из этих факторов в первую очередь необходимо выделить
разработку стратегии бесконтактных войн и сетецентрического информа­
ционного оружия;
существенное возрастание разведывательно-информационной компоненты
среди других видов обеспечения боевых действий;
необходимость оперативного наращивания информационных возможно­
стей на стратегических направлениях;
возрастание роли высокоточного оружия, особенно крылатых ракет боль­
шой дальности и беспилотных летательных аппаратов;
появление новых видов средств поражения;
расширение номенклатуры космических, воздушных, наземных (надвод­
ных) и подводных объектов, подлежащих первоочередному уничтожению в
ходе боевых действий;
возрастание уязвимости радиоизлучающих информационных средств на­
земного базирования от воздействия различных средств поражения;
повышение эффективности средств радиоэлектронной борьбы;
снижение радиолокационной заметности объектов боевой техники;
сокращение времени на подготовку и применение оружия;
появление новых тактических приемов использования техники военного
назначения;
использование новых принципов повышения живучести.
Функциональные связи этих факторов, определяющих специфику приме­
нения боевой техники различного назначения и влияющие на облик АК РЛДН
нового поколения, показаны на рис. 6.2.
Концепция бесконтактных войн предполагает ведение боевых действий
не путем контактного противоборства вблизи линии боевого соприкоснове­
ния, а по всей территории противника [22, 57]. Эта концепция основана на
существенно более широком использовании авиации и высокоточных ракет
дальнего действия различного базирования, способных практически одновре­
менно разрушать инфраструктуру, жизненно важные объекты и информацион­
ные системы по всей территории противоборствующей стороны. Для решения
таких задач необходима сложная территориально распределенная система ин­
формационного обеспечения и средств поражения, получившая название сете­
центрического оружия [14]. Эта система содержит в общем случае совокуп­
ность спутниковых разведывательных и навигационных систем, авиационных
комплексов дозора и наведения, разведывательно-ударных комплексов, над­
водных кораблей, ракетных систем наземного и воздушного базирования, бес­
пилотных разведывательных и ударных летательных аппаратов, ракет различ­
ного базирования и т. д. [14].
При ведении боевых действий такого рода существенно возрастает роль
разведывательно-информационного обеспечения и появляется необходимость
его оперативного наращивания на отдельных стратегических направлениях.
Рис. 6.2
В значительной мере эти задачи решаются с использованием мобильных авиа­
ционных комплексов радиолокационного дозора и наведения [5, 19].
Необходимость повышения мобильности радиоизлучающих информаци­
онных средств обусловлена также следующими причинами. Одна из них объ-
ясняется отсутствием сплошного радиолокационного поля на театре военных
действий (ТВД). Другая - определяется возрастанием уязвимости стационар­
ных наземных радиоизлучающих систем к воздействию различных средств по­
ражения. Опыт боевых действий в Югославии и Ираке свидетельствует о том,
что наземные РЛС различного назначения уничтожались в течение нескольких
минут после начала работы.
Особую роль в решении этих задач играет высокоточное оружие (ВТО) средства поражения, обеспечивающие попадание либо в малоразмерные цели,
либо в наиболее уязвимые места крупноразмерных объектов [36].
Наиболее значимым видом ВТО являются крылатые ракеты дальнего дей­
ствия, обеспечивающие поражение целей на удалениях до нескольких тысяч
километров. Этот вид оружия является основой реализации концепции бескон­
тактных войн [58] или «длинной руки».
Устойчивой тенденцией развития авиационной техники с конца 1960-х го­
дов стало снижение радиолокационной заметности (РЛЗ) летательных аппа­
ратов. Наиболее ярко эта тенденция проявилась в реализации программы
«Стеле», в рамках которой разработаны малозаметные истребитель F-117A и
бомбардировщик В-2, и которая распространена в дальнейшем на все новые
объекты авиационной, морской и наземной техники.
Снижение РЛЗ - один из важных направлений совершенствования тактики
ведения боевых действий авиации. Обусловлено это прежде всего тем, что
снижение РЛЗ предопределяет существенное уменьшение эффективной по­
верхности рассеивания цели в направлении облучения, а соответственно, и
уменьшение дальностей обнаружения и захвата со всеми вытекающими отсюда
последствиями как тактического, так и технического плана.
В техническом плане это повышение требований к быстродействию всех
режимов функционирования противоборствующих информационно-управляю­
щих систем (ИУС) и использование алгоритмов обработки сигналов, которые
позволяют решать задачи их обнаружения, разрешения и оценивания парамет­
ров при существенно меньших значениях ЭПР целей.
Достаточно эффективным приемом решения последней задачи является ис­
пользование сложных сигналов большой длительности, сверхдлительного (до
десятых долей секунды) когерентного накопления [54] и поляризационной об­
работки сигналов, а также многопозиционных систем обнаружения и сопрово­
ждения [59].
Следует подчеркнуть, что за последние двадцать лет существенно возрос­
ла эффективность применения средств РЭБ. Это обусловлено следующими
причинами:
1) за счет внедрения в станции помех цифровой техники появилась воз­
можность формировать ответные сигналоподобные, в частности, многократные
по дальности и скорости, помехи с любыми законами увода. Эти помехи за-
трудняют либо делают невозможным процесс наблюдения целей в режиме об­
зора и приводят к срыву слежения при автоматическом сопровождении;
2) в практику РЭБ внедрены принципы коллективной обороны, что позво­
ляет создать высокоэффективные многомерные по пространству помехи;
3) весьма перспективным оказалось применение сверхвысокочастотного
(СВЧ) оружия функционального поражения (ФП) [25, 29];
4) все большее применение находят алгоритмические воздействия, объек­
том подавления которых являются бортовые вычислительные системы [25].
Проблема защиты БРЛС от совмещенных с целью сигналоподобных по­
мех и пути ее решения в однопозиционных радиолокационных системах рас­
смотрены в [1, 2]. Следует, однако, заметить, что степень приближения этих
помех к реальным сигналам все время увеличивается, усложняются законы
увода по дальности и скорости, что делает бессмысленной практику защиты от
каждой помехи в отдельности. В связи с этим чрезвычайно важной становится
задача разработки систем и способов защиты, инвариантных к конкретному
виду сигналоподобных и имитирующих помех.
Один из способов решения этой задачи основан на определении местопо­
ложения постановщика помех (излучающей цели) по результатам измерения
угловых координат в пассивном режиме (при подавленном канале измерения
дальности и скорости).
Отметим, что знание координат постановщика помех (радиоизлучающей
цели) необходимо также для вывода наводимого самолета (ракеты) в точку
применения оружия. В связи с этим оценивание координат постановщика по­
мех должно осуществляться в рамках более общей задачи - управления траек­
торией самолета-носителя оружия.
Чрезвычайное расширение номенклатуры помех и их имитирующих спо­
собностей делают бесперспективной концепцию разработки средств помехозащиты (ПЗ) по принципу «каждой помехе свое средство защиты». В связи с
этим разрабатывается единый комплекс ПЗ с широко развитым обобщенным
аппаратом обнаружения и анализа помех с соответствующей адаптацией алго­
ритмов защиты [11].
Весьма эффективным способом работы в условиях помех является исполь­
зование полуактивных и пассивных режимов работы РЛС, а также так назы­
ваемой активной (агрессивной) помехозащиты. Суть активной помехозащиты состоит в совместном использовании сигналов своего комплекса РЭП и
бортовой РЛС в игровых ситуациях, которые позволяют периодически полу­
чать для нее временные и частотные интервалы, свободные от помех.
Специфическая особенность ведения боевых действий — необходимость
переработки огромного количества информации для принятия рациональных
решений. В связи с этим лица боевого расчета, принимающие решения, нуж­
даются в серьезной интеллектуальной поддержке. Поэтому в состав АК РЛДН
нового поколения обязательно должна входить система искусственного интел­
лекта, обеспечивающая поддержку принятия решения штурманами сопровож­
дения и наведения.
Использование новых принципов повышения живучести информацион­
ных систем базируется на применении совокупности конструкторских, техно­
логических и тактических приемов, основными среди которых являются ис­
пользование территориально распределенных многопозиционных систем и на
качественном повышении скрытности работы. Для АК РЛДН повышение жи­
вучести связано, прежде всего, с повышением скрытности процедур наведения
[21] и использованием полуактивных и пассивных режимов работы совместно
с другими АК РЛДН и наводимыми ЛА.
Появление новых средств поражения, направленных прежде всего на
уничтожение и подавление информационных систем противника, связано с ис­
пользованием СВЧ оружия ФП, ударных беспилотных ЛА (БЛА), оснащенных
РЛС [4], станциями радиотехнической разведки, противорадиолокационными
[8, 46] и обычными ракетами «воздух-поверхность». В ближайшее время сле­
дует ожидать принятия на вооружение гиперзвуковых БЛА и беспилотных
боевых истребителей. Необходимо отметить, что средствам противоборства
этим видам боевой техники потребуются системы сопровождения с сущест­
венно большим диапазоном скоростей и ускорений устойчивой работы.
В основе применения СВЧ-оружия ФП лежит излучение в районе цели
сверхмощных импульсов малой длительности, которые вызывают тепловые
(невосстанавливаемые) или электрические (восстанавливаемые) пробои в по­
лупроводниковой технике любого назначения. Достоинствами СВЧ-оружия
ФП являются его универсальность, обусловленная внеполосностью его про­
никновения в любые информационные системы на базе полупроводниковой
элементной базы, и ненужность сложнейших систем анализа и воспроизведе­
ния сигналов подавляемых систем, которые являются необходимыми атрибу­
тами средств радиоэлектронного подавления [53]. Эти особенности предопре­
деляют возможность подавления даже неработающих радиоэлектронных сис­
тем. Кроме того, несомненное достоинство этого вида оружия - качественное
снижение требования к точности его доставки в область подавления.
Весьма перспективным средством ведения информационной борьбы яв­
ляются ударные БЛА. Использование БЛА, оснащенных станциями радиотех­
нической разведки и противорадиолокационными ракетами в качестве средств
разведки и поражения радиоэлектронных систем, существенно расширяет воз­
можности информационно-управляющих систем военного назначения [10].
Интенсивное развитие средств ведения боевых действий приводит к зна­
чительному расширению номенклатуры новых видов боевой техники раз­
личного базирования, обладающих специфическими свойствами и требую­
щих все более сложного информационного обеспечения. К таким видам техни-
ки можно отнести спутниковые информационные системы, ретрансляторы раз­
личного назначения, элементы автоматизированных систем управления и
средств связи, средства радиоэлектронной борьбы, РЛС поля боя, информаци­
онные системы воздухоплавательного базирования, системы ПВО, специали­
зированные виды вертолетов, разведывательные и ударные беспилотные лета­
тельные аппараты, сверхманевренные самолеты и т. д.
Появление новых видов боевой техники неизбежно приводит к использо­
ванию новых тактических приемов, из которых необходимо прежде всего
выделить:
применение СВЧ-оружия ФП;
групповые действия с массированным применением крылатых ракет (КР)
и беспилотных ЛА;
использование сверхманевренных многофункциональных самолетов;
использование гиперзвуковых ЛА;
загоризонтную стрельбу наземных и корабельных систем ПВО;
активную (агрессивную) помехозащиту;
многопозиционное, многоканальное наведение с использованием полуак­
тивных и пассивных режимов работы РЛС и ряд других.
Анализ боевых действий в Югославии и Ираке свидетельствует о том, что
в первом эшелоне средств нападения обязательно используются КР с СВЧоружием ФП, выводящие из строя практически все виды электронной полупро­
водниковой техники. В связи с этим значительно возрастает роль средств защи­
ты АК РЛДН и наводимых ЛА от СВЧ-оружия ФП. Особенно актуальной эта
задача становится при использовании в качестве антенных систем активных фа­
зированных решеток. Задача защиты от СВЧ-оружия является многоплановой и
подразумевает (включает) не только огневое поражение средств доставки этого
оружия, но и разработку специальных средств защиты электронной техники,
включающих экранирование, использование быстродействующих разрядников
и элементной базы на основе сверхминиатюрных электровакуумных приборов.
Применение практически всех видов боевой техники все более приоб­
ретает групповой характер. Использование нескольких групп ЛА, одновреМеННО НЯВОДИМЫХ С рШИЧНЫХ сторон, заставляет противника рассредоточи
вать усилия с точки зрения как информационного обеспечения средств защиты,
так и огневого противодействия. Особенно эффективным является использова­
ние больших групп средств воздушного нападения, приводящее к так называе­
мому эффекту «роя», возникающему при нападении роя пчел на животных.
Этот эффект проявляется тогда, когда число целей превышает пропускную
способность средств защиты. Особенно эффективен этот прием при использо­
вании низколетящих КР различного базирования и дешевых БЛА.
Для снижения влияния эффекта «роя» в перечне режимов работы
АК РЛДН должен быть режим сопровождения больших групп, в том числе и
неразрешаемых целей. Такой режим должен содержать два подрежима: 1) для
группирования целей по различным тактическим признакам; 2) обеспечиваю­
щий автоматическое сопровождение группы в целом с отображением ее формы
и размеров.
Большие возможности по совершенствованию приемов боевого примене­
ния дают беспилотные ЛА, решающие не только разведывательные, но и удар­
ные задачи [4,49]. Отсутствие экипажа на летательных аппаратах этого типа
позволяет упростить их конструкцию и снизить стоимость, существенно уве­
личить диапазон допустимых перегрузок и, соответственно, увеличить слож­
ность выполняемых маневров.
Планируемый в ближайшее десятилетие выпуск в США боевых беспилот­
ных, в том числе и гиперзвуковых, истребителей, взаимодействующих с пило­
тируемыми самолетами, существенно усиливает боевые возможности истреби­
тельной авиации. Необходимость отождествления пилотируемых самолетов и
БЛА различного назначения на АК РЛДН требует усовершенствования исполь­
зуемых алгоритмов распознавания вплоть до типа цели.
Необходимо подчеркнуть, что применение гиперзвуковых и сверхманев­
ренных ЛА со сложными законами движения потребует существенного расши­
рения диапазонов устойчивого сопровождения по первым и вторым производ­
ным всех фазовых координат, используемых для управления и целеуказания
ракетам.
Большие возможности по использованию новых эффективных приемов
ведения воздушного боя дают сверхманевренные летательные аппараты
(СМЛА). За счет развитой механизации крыла, применения непосредственного
управления подъемной и боковой силами и управляемого вектора тяги удается
реализовать очень сложные траекторные эволюции ЛА.
Основными приемами, обеспечивающими расширение боевых возможно­
стей СМЛА, являются [5] быстрые развороты со сверхмалыми радиусами, за­
висание в воздухе до 3...4 с, сальто в воздухе (чакра Фролова) и полупетля с
пуском ракет в заднюю полусферу. Кроме того, СМЛА могут совершать скач­
кообразное изменение положения в пространстве без изменения положения
строительных осей, сохранять направление полета при значительном измене­
нии пространственного положения строительных осей, иметь возможность бы­
строго набора высоты при любом пространственном положении. Совокупность
этих приемов позволяет в значительной мере расширить зону применения ору­
жия и сократить время на вывод в область его использования. Некоторые из
новых тактических приемов применения СМЛА показаны на рис. 6.3 [5].
На рис. 6.3 а,б представлены различные варианты зависания СМЛА в
воздухе, иллюстрирующие возможность в кратчайшие сроки занять
пространственное положение, удобное для пуска ракет; на рис. 6.3,β - маневр
сальто в воздухе с пуском ракет в заднюю полусферу; на рис. 6.3 г,д - маневры
в разных плоскостях с малыми радиусами разворота, дающие возможность
занять выгодное положение для пуска ракет.
Рис. 6.3
Необходимо отметить, что применение оружия со сверхманевренных са­
молетов по сверхманевренным целям потребует усложнения не только методов
самонаведения самолетов и ракет, но и методов их командного наведения с
АК РЛДН.
Расширение номенклатуры многофункциональных самолетов [5], спо­
собных эффективно поражать как воздушные, так и наземные цели, сущест­
венно усложняет процедуру раскрытия замысла противоборствующей стороны
и принятия соответствующих контрмер. Эта особенность приводит к двум по­
следствиям. С одной стороны, в АК РЛДН необходимо иметь алгоритмы ко­
мандного наведения не только на воздушные, но и на наземные объекты, а с
другой стороны, необходимо иметь более сложные и достоверные алгоритмы
идентификации цели.
Возрастание дальности применения ракет «поверхность-воздух» систем
ПВО и корабельных систем защиты сводится к нулю при действии по низколе­
тящим целям, когда дальность их обнаружения ограничивается радиогоризон­
том. Для обеспечения загоризонтной стрельбы по низколетящим целям целесо­
образно использовать возможности АК РЛДН, барражирующего на большой
высоте. Для решения этой проблемы необходимо иметь специальные режимы
работы АК РЛДН, обеспечивающие сопровождение низколетящих целей, их
идентификацию, упреждающее целераспределение по наземным системам
ПВО и выдачу команд целеуказания и радиокоррекции.
Большие возможности по применению новых вариантов ведения боевых
действий дает использование многоканальных многопозиционных систем
наведения, РЛС которых образуют единую территориально распределенную
информационную систему [14]. Такие системы позволяют расширить инфор­
мационные возможности АК РЛДН [15, 20] за счет извлечения дополнительной
информации из пространственной структуры электромагнитного поля. Особен­
но большими информационными возможностями обладают многопозиционные
системы воздушного и смешанного воздушно-космического и воздушноназемного базирования. С учетом этого в АК РЛДН нового поколения обяза­
тельно должны быть предусмотрены многопозиционные режимы с использо­
ванием полуактивных и пассивных режимов совместной работы как с другими
АК РЛДН, так и с наводимыми самолетами.
Расширение зон захвата ракет и диапазона их допустимых перегрузок [5]
позволяет реализовать концепцию «стрельбы навскидку» практически мгно­
венно после захвата цели, не дожидаясь отработки первоначальных ошибок со­
провождения БРЛС. В связи с этой особенностью существенно возрастают тре­
бования к точности и быстродействию информационных систем, включая сни­
жение времени обновления сведений о целях. Необходимо подчеркнуть, что
решение этой задачи в АК РЛДН без использования ФАР невозможно.
В заключение можно отметить следующие положения, определяющие
облик перспективных комплексов РЛДН.
1. С учетом стратегии бесконтактных войн и сетецентрического оружия
при отсутствии сплошного радиолокационного поля на ТВД и необходимости
оперативного наращивания информационных усилий на стратегических на­
правлениях необходимо увеличивать размеры зоны барражирования, высоту
полета, дальность обнаружения и сопровождения и уменьшать время подготов­
ки АК РЛДН к вылету.
2. Расширение номенклатуры целей, подлежащих первоочередному унич­
тожению, требует использования в АК РЛДН режимов работы по воздушным и
наземным объектам с селекцией низколетящих целей (крылатых ракет) и на­
земных движущихся целей. Кроме того, расширение состава обслуживаемых
целей предопределяет необходимость использования режимов идентификации
целей вплоть до их типа.
3. Усиление роли групповых действий обусловливает необходимость со­
вершенствования режимов многоцелевого сопровождения как с точки зрения
увеличения числа сопровождаемых целей, так и улучшения разрешающей спо­
собности для определения количественного состава групп. При появлении
большого числа целей, приводящего к возникновению эффекта «роя», необхо­
димо иметь режимы группирования целей по тактическим признакам с сопро­
вождением групп в целом с индикацией их размеров.
4. Интенсивное маневрирование целей и наводимых самолетов приводит к
ухудшению показателей систем как первичной, так и вторичной обработки, осо­
бенно при использовании длительного когерентного накопления. В связи с этим в
алгоритмах первичной и вторичной обработки бортовой РЛС АК РЛДН, а также в
законах наведения необходимо учитывать маневры целей и наводимых ЛА.
5. Сложность маневров сверхманевренных и гиперзвуковых летательных
аппаратов и использование всеракурсных ракет обусловливают необходимость
наведения управляемых ЛА в упрежденную точку встречи. Для информацион­
ного обеспечения методов наведения на СМЛА необходимо расширить состав
фазовых координат, оцениваемых бортовой РЛС, включая оценивание состав­
ляющих ускорений.
6. Использование многопозиционного принципа построения РЛС позво­
ляет улучшить практически все ее тактические показатели, однако требует зна­
чительного усложнения алгоритмов управления как информационными пото­
ками внутри нее, так и отдельными позициями.
7. Появление эффективных средств поражения на базе СВЧ-оружия требует
разработки эффективных мер защиты полупроводниковой техники любого назна­
чения. Особенно актуальными эти меры становятся при использовании АФАР.
8. Важным способом решения проблемы помехозащиты является исполь­
зование скрытной работы на базе полуактивных и особенно пассивных режи­
мов функционирования информационных систем. Для существенного улучше­
ния скрытности работы системы наведения за счет применения полуактивного
режима необходимо использовать для РЛС АК РЛДН и наводимых самолетов
один частотный диапазон. В пассивных режимах работы необходимо ради­
кально повысить точность оценивания дальности и скорости сближения. Еще
одним приемом повышения помехозащищенности является использование
принципа активной (агрессивной) помехозащиты, основанного на игровых си­
туациях с применением собственных средств РЭБ.
9. Сложность и многообразие решаемых задач требуют разработки и вне­
дрения группы оперативно-советующих систем на базе искусственного интел­
лекта, адаптированных под конкретные тактические ситуации и режимы рабо­
ты АК РЛДН и наводимых ЛА.
6.2. Экономические факторы, влияющие на облик
авиационных комплексов радиолокационного
дозора и наведения
Желание снизить все виды затрат на ведение боевых действий приводит к
необходимости учета экономических факторов как при ведении войн, так и при
разработке новых видов боевой техники, в том числе и при создании АК РЛДН
нового поколения. Экономичность АК РЛДН - совокупность материальных,
финансовых, временных и людских затрат на разработку, испытание, эксплуа­
тацию, модернизацию и боевую работу [23].
Необходимость учета экономических факторов прежде всего обусловлена:
1) существенным удорожанием разработки и эксплуатации самолетаносителя и его бортового оборудования, а также информационных и ударных
систем различного базирования, с которыми АК РЛДН приходится взаимодей­
ствовать в процессе боевой работы;
2) сложностью и высокой затратностью мер по защите АК РЛДН от
средств поражения противника;
3) высокой стоимостью подготовки летчиков, операторов и обслуживаю­
щего персонала как самого АК РЛДН, так и взаимодействующих с ним ЛА.
Учет этих особенностей предопределяет различные направления модерни­
зации и разработки АК РЛДН нового поколения [18]:
1) эволюционный путь создания, основанный, прежде всего, на качествен­
ной модернизации бортового оборудования, обусловливает использование
опыта и наработок предыдущих модификаций;
2) снижение стоимости жизненного цикла;
3) многофункциональность применения;
4) использование экономичных боевых режимов;
5) повышение боевой живучести [21];
6) снижение потерь самолетов;
7) оптимизация траекторий барражирования и обслуживаемых зон ответ­
ственности;
8) повышение требований к уровню подготовки экипажей и обслуживаю­
щего персонала;
9) интеграция аппаратуры;
10) использование беспилотных боевых самолетов;
11) использование АК РЛДН в составе единых сетецентрических инфор­
мационных систем.
Функциональные связи между этими направлениями показаны на рис. 6.4.
Рис. 6.4
Далее рассматриваются особенности влияния экономических факторов на
облик АК РЛДН нового поколения с учетом специфических особенностей
дальнего радиолокационного обнаружения и наведения [23].
Авиационный комплекс РЛДН представляет собой очень дорогостоящее
изделие длительного пользования, за время эксплуатации которого будут появ­
ляться новые технологии, новые виды боевой техники и способы ее примене­
ния. В связи с этим для снижения стоимости жизненного цикла необходимо
разрабатывать архитектуру нового комплекса по открытому принципу,
позволяющему наращивать его информационные возможности [15, 20] с уче­
том новых требований, базируясь на опыте создания эксплуатации и боевого
применения предыдущих поколений. Необходимо подчеркнуть, что экономич­
ность боевого применения АК РЛДН во многом зависит от грамотности экипа­
жа и обслуживающего персонала, начиная от разработки полетного задания и
заканчивая спецификой управления АК РЛДН и наводимых самолетов при
боевой работе. В связи с этим возникает проблема повышения требований к
подготовке экипажа АК РЛДН и всего обслуживающего персонала. Наибо­
лее рациональным приемом решения этой задачи является разработка учебнотренировочных средств различной степени сложности и назначения, включая
тренажеры с максимально возможной имитацией условий боевой работы и
эксплуатации.
Немаловажную роль в повышении экономичности использования АК РЛДН
играет снижение затрат топлива на барражирование и наведение управ­
ляемых самолетов. В связи с этим необходимо принимать меры по оптимиза­
ции траекторий барражирования и наведения. Для решения последней задачи
более целесообразно использовать наведение ЛА в упрежденную точку встре­
чи, обеспечивающее полет практически по прямолинейной траектории, в отли­
чие от методов погони и маневра [44].
Проблема снижения потерь затрагивает как сам АК РЛДН, так и наводи­
мые самолеты. Необходимо отметить, что защита АК РЛДН является дорого­
стоящей задачей, поскольку для ее решения выделяется большое число истре­
бителей прикрытия с соответствующими расходами топлива и средств пораже­
ния. Одно из важных факторов снижения потерь своих самолетов состоит в
качественном улучшении процедур обнаружения угроз и их устранения. Пер­
спективным направлением повышения безопасности АК РЛДН является ис­
пользование беспилотных разведывательных и ударных летательных аппаратов
при решении задач с повышенными угрозами [4].
Важным фактором снижения потерь своих самолетов является радикаль­
ное повышение скрытности процедур наведения [28], основанное на более ши­
роком использовании пассивных и полуактивных режимов работы АК РЛДН и
наводимых ЛА в рамках многопозиционных систем наведения [56, 60]. Весьма
перспективный способ защиты АК РЛДН - использование на истребителях
прикрытия ракет с СВЧ-оружием функционального поражения [25, 29].
6.2.1. Многофункциональность АК РЛДН
В общем случае многофункциональность, давая возможность использо­
вать один самолет и один экипаж для решения большого числа боевых задач,
является одним из кардинальных способов снижения затрат на ведение бое­
вых действий. Особую значимость многофункциональность применения име­
ет для АК РЛДН, который должен осуществлять информационное обеспече­
ние боевых действий практически всех видов вооруженных сил. Однако рас­
ширение круга решаемых задач однозначно связано с увеличением числа
режимов работы обзорно-прицельных систем, включая БРЛС. При этом необ­
ходимо обеспечивать процессы наведения ракет, самолетов и кораблей на
воздушные, наземные и надводные цели, а также процедуры управления бес­
пилотными ЛА, другими типами АК РЛДН, топливозаправщиками, ретранс­
ляторами и т. д.
Анализ задач, решаемых при ведении боевых действий, и информации,
используемой для их решения, показывает, что необходим режим поиска и об­
наружения целей во все увеличивающейся зоне ответственности, режимы
автоматического сопровождения одиночных и групповых воздушных и назем­
ных целей, включая цели как разнесенные в пространстве, так и в составе
больших компактных групп, режимы распознавания угроз и целей вплоть до их
типа. Необходимы также режимы совместного функционирования информаци­
онных систем в составе многопозиционных систем наведения с использовани­
ем активных, полуактивных и пассивных вариантов работы как в дальней, так и
в ближней зонах, применяемые для информационного обеспечения систем
обороны носителя, процедур автоматической дозаправки в воздухе и т. д.
Анализ информации, необходимой для решения задач навигации, разведки
и уничтожения наземных целей, свидетельствует о необходимости использова­
ния всех возможных режимов землеобзора БРЛС: обзора земной поверхности с
использованием обычного луча (ОЛ) и синтезирования апертуры, обеспечи­
вающего наилучшую детальность изображения, а также режима селекции дви­
жущихся наземных целей [35].
Следует отметить, что использование режимов землеобзора требует ис­
пользования различных траекторий полета наводимых самолетов и большого
набора средств поражения различных целей [3, 30], для применения которых
необходим вывод управляемого самолета на заданную дальность до цели под
определенным углом к ней с определенной угловой скоростью линии визиро­
вания, что обусловливает необходимость разработки универсального метода
наведения. Необходимость управления самолетом вплоть до применения ору­
жия обусловлена в том числе и требованием повышения скрытности [28].
Другим направлением, расширяющим функциональные возможности
АК РЛДН, является его использование в качестве одной из позиций в составе
многопозиционной системы наведения (МПСН) [56]. Следует подчеркнуть,
что все преимущества МПСН могут быть реализованы в полной мере лишь
после разработки алгоритмов оптимального, в том или ином смысле, управ­
ления позициями, их совместным радиолокационным полем, временным
графиком их взаимосвязанной работы и индивидуальными режимами от­
дельных РЛС.
Одним из самых эффективных приемов, позволяющих существенно повы­
сить вероятность преодоления наземных средств ПВО, является полет на ма­
лых и сверхмалых высотах [46]. Повышение этой вероятности объясняется
следующими причинами:
1) уменьшением дальности обнаружения низколетящих целей (НЛЦ) на­
земными РЛС и соответствующим уменьшением времени на подготовку и вы­
полнение перехвата;
2) ухудшением точности или срывом сопровождения НЛЦ по направле­
нию наземными РЛС из-за эффекта «маневра»;
3) проявлением эффектов затенения и антиподов.
Самым радикальным способом обнаружения маловысотных целей являет­
ся использование АК РЛДН с импульсно-доплеровскими РЛС.
Многофункциональность АК РЛДН, предопределяющая широкий набор
методов наведения на воздушные и наземные (надводные) цели и использова­
ние большого набора режимов работы, обеспечивающих все возможные вари­
анты его боевого применения, обусловливает ряд принципиальных особенно­
стей его построения:
1) управление информационными потоками, обеспечивающее рациональ­
ное целераспределение;
2) выбор адекватного метода наведения и необходимого режима работы;
3) способ обзора пространства, выбор диаграммы направленности антенны;
4) выбор нужных алгоритмов первичной и вторичной обработки сигналов,
а также определение временной диаграммы выполнения различных операций,
адаптированной под конкретную задачу, решаемую самолетом.
Важной особенностью является использование в перспективной БРЛС
широкополосной АФАР (ФАР), способной реализовать весь необходимый на­
бор диаграмм направленности, включая формирование нуля в направлении ис­
точника помех, в полосе частот используемых зондирующих сигналов с ком­
плексом алгоритмов, реализующих преимущества электронного способа
управления лучом антенны. Кроме того, необходимы рациональный отбор ин­
формации и унификация ее представления в системе индикации, не приводя­
щие к информационно-психологической перегрузке операторов в процессе на­
ведения самолетов. Принципиально важным является наличие высокопроизво­
дительной бортовой вычислительной системы.
6.2.2. Экономичные боевые режимы работы АК РЛДН
Под экономичными ниже понимаются режимы работы АК РЛДН, позво­
ляющие снизить в процессе решения боевых задач все виды затрат. Из этих ре­
жимов можно выделить: автоматическое сопровождение целей в режиме обзора,
дающее возможность одному самолету осуществлять наведение большого числа
своих ЛА на большое число воздушных и наземных (надводных) целей; режим
сопровождения с разрешением целей в плотной группе, позволяющий определить
рациональное число привлекаемых перехватчиков и средств поражения.
Под АСЦРО, именуемым иногда режимом дискретного сопровождения
(РДС), понимается процедура непрерывного формирования относительных и
абсолютных фазовых координат целей при достаточно редком (дискретном)
поступлении от них отраженных сигналов [31]. Достоинством АСЦРО является
органичное сочетание возможностей одновременного повышения боевой эф­
фективности и экономичности ведения боевых действий, которые базируются
Авиационные комплексы радиолокационного дозора и наведения
на использовании одного самолета и одного экипажа для решения широкого
круга задач при обслуживании большого числа целей. Способность этих алго­
ритмов к непрерывному автоматическому оцениванию координат множества
целей при дискретном получении от них отраженных сигналов дает возмож­
ность непрерывно формировать сигналы управления самолетами и команды
целеуказаний (ЦУ) ракетам.
Автоматическое сопровождение целей в режиме обзора, представляющее
специфический режим совместного функционирования РЛС и БВС, состоит из
нескольких этапов [31]:
1) формирование первичных измерений, завязки траекторий;
2) экстраполяция относительных фазовых координат (траекторий) всех
сопровождаемых целей в промежутках между поступлениями от БРЛС резуль­
татов измерений;
3) идентификация поступающих измерений на принадлежность тем или
иным экстраполируемым траекториям;
4) коррекция (фильтрация) той или иной из экстраполируемых траекторий
по результатам идентифицированных измерений;
5) ранжирование целей по степени их важности (опасности);
6) сброс сопровождаемых траекторий.
Функциональные связи между этими этапами показаны на рис. 6.5.
Рис. 6.5.
Существующие алгоритмы АСЦРО с учетом возможностей бортовых вычис­
лителей и антенных систем с механическим сканированием имеют большие вре­
мена завязки траектории, большие ошибки экстраполяции и ее коррекции, недос­
таточную достоверность идентификации получаемых измерений и недостаточно
высокую достоверность ранжирования целей по степени опасности [5].
В связи с этим в АК РЛДН нового поколения необходимо:
1) существенно снизить время завязки траектории и ошибки экстраполя­
ции за счет использования ФАР, позволяющей значительно уменьшить время
обращения к цели;
2) повысить точность оценивания всех фазовых координат, используемых
для управления наводимыми ЛА и в качестве целеуказаний их ракетам за счет
использования алгоритмов аналого-дискретной фильтрации [45];
3) улучшить разрешающую способность за счет использования бесстробовой идентификации измерений и траекторного управления наблюдением;
4) повысить достоверность ранжирования целей по степени их важности.
Кардинальным направлением решения этого вопроса является использование
более сложных линейно-квадратичных функционалов, дающих возможность
определить не только наиболее опасные цели, но и цели, наиболее благоприят­
ные для поражения [44].
Одно из направлений повышения экономичности ведения боевых дейст­
вий авиацией связано с определением рационального состава группы самоле­
тов, снаряжаемых для перехвата летательных аппаратов противника. Возмож­
ность определения требуемого состава группы перехватчиков, адекватно отве­
чающей реальной обстановке, базируется на определении типов
перехватываемых летательных аппаратов, их количественного состава и вза­
имного расположения. Возможность определения состава группы и взаимного
расположения ЛА в ней в значительной мере зависит от разрешающей способ­
ности БРЛС. Особенно актуальна проблема обеспечения высокого разрешения
при сопровождении компактных групп целей в плотных боевых порядках.
Из всех этих видов разрешения наиболее сложно обеспечить высокую раз­
решающую способность по угловым координатам, поскольку она имеет естест­
венное, труднопреодолимое ограничение, определяемое шириной диаграммы
направленности, которая в свою очередь зависит от соотношения размеров ан­
тенны и длины волны.
Проблема улучшения разрешающей способности по углу может решаться
несколькими способами. Получение сверхразрешения по углу, основанное на
использовании многопозиционного принципа [56], требует высокоточного
управления позициями и высокоточной синхронизации бортовых систем от­
дельных позиций.
Способы получения сверхразрешения, основанные на применении различ­
ных процедур спектрального оценивания, могут быть использованы лишь в
БРЛС с ФАР и требуют значительных вычислительных затрат и соблюдения
большого числа ограничений.
Весьма перспективным направлением улучшения разрешающей способно­
сти по углу, пригодным к применению как в многопозиционных, так и в однопозиционных радиолокационных системах с ФАР или с обычными антеннами,
является использование так называемого траекторного управления наблюде­
ниями [39, 41]. В приложении к процедурам измерения угловых координат оно
основано на переходе от разрешения по углу, определяемого шириной диа­
граммы направленности, к доплеровскому обострению луча.
Необходимо отметить, что законы траекторного управления для получе­
ния таких маневров не сложны и могут быть достаточно просто реализованы на
практике.
6.23. Снижение потерь самолетов
Снижение потерь своих самолетов содержит два аспекта, один из которых
связан со снижением потерь наводимых самолетов, а второй - с защитой непо­
средственно самого АК РЛДН.
Вследствие особой важности последней проблемы, обусловленной слож­
ностью решаемых АК РЛДН задач и высокой стоимостью его производства и
эксплуатации, ей уделяется особое внимание.
Повышение безопасности АК РЛДН обеспечивается совокупностью мер,
включающих как использование истребителей прикрытия, так и совершенство­
вания режимов работы его информационных систем. При этом для снижения
затратности процедур прикрытия важное значение приобретает оптимизация
районов базирования и барражирования истребителей защиты. Кроме того,
большое значение имеет принятие специальных мер по увеличению осведом­
ленности экипажа АК РЛДН о воздушной и наземной обстановке. К этим ме­
рам в первую очередь относятся:
1) увеличение дальности действия бортовой РЛС до значений, позволяю­
щих заблаговременно принять меры по ликвидации возникающих угроз;
2) идентификация обнаруженных целей вплоть до их типа;
3) достоверное ранжирование целей по степени их опасности;
4) уменьшение времени пропадания целей в зонах режекции [27];
5) предотвращение попадания атакующих средств поражения в мертвую
зону обзора в вертикальной плоскости;
6) использование одновременной работы нескольких АК РЛДН, обеспечи­
вающих взаимное информационное прикрытие друг друга в зонах невидимости
целей.
Следует подчеркнуть, что для повышения безопасности функционирова­
ния АК РЛДН необходимо совершенствовать индивидуальные средства защи­
ты, включая средства радиоэлектронной борьбы и СВЧ-оружие ФП [25, 29].
Особенности решения проблемы снижения потерь наводимых самолетов
более подробно рассмотрены в 6.4.
6.3. Технологические факторы, влияющие на облик
авиационных комплексов радиолокационного
дозора и наведения
Технологические факторы определяют различные аспекты процессов, ох­
ватывающих весь жизненный цикл АК РЛДН и включающих поддержку разра­
ботки и саму разработку, эксплуатацию, а также применение готовых техноло­
гических продуктов, отработку моделей, подсистем и систем в целом и выпуск
документации [24].
В общем случае, под технологиями понимают либо конкретный процесс,
при помощи которого производят определенный продукт, либо описание и со­
ответствующую поддержку процесса производства. Следует отметить, что лю­
бая технология имеет предел своего использования, под которым подразуме­
вают предельные технологические параметры конечного продукта, наиболее
важные для потребителя. Если предельные параметры уже не удовлетворяют
потребителя, то неизбежно использование других технологий, обладающих
большими возможностями.
Как правило, при разработке серьезных проектов, к которым, собственно,
и относится создание АК РЛДН нового поколения, должна разрабатываться
четкая программа реагирования на технологические пределы. При этом в фир­
ме-разработчике должны, как минимум, разрабатываться два проекта. Один из
них направлен на выявление естественных пределов совершенствования
имеющейся основной технологии, а второй - на отыскание более перспектив­
ной альтернативной технологии.
Следует отметить, что при разработке таких сложных изделий, как
АК РЛДН, используются сотни и тысячи различных технологий. Однако среди
них можно выделить одну, две или несколько, имеющих решающее значение для
разработки авиационного комплекса, которые называют критическими техноло­
гиями. В качестве примера ниже приведен перечень из ряда опубликованных
МО США критических технологий [52], использование которых пригодно при
разработке АК РЛДН нового поколения. К этим технологиям относятся:
1) изготовление арсенид-галлиевых и других сложных полупроводников;
2) микроэлектронные изделия и их изготовление;
3) интегральная оптика;
4) волоконно-оптические линии связи;
5) ЭВМ с распределенной архитектурой;
6) технологии создания надежного программного обеспечения;
7) имитация и моделирование;
8) средства функционального поражения и средства защиты от них;
9) импульсные источники питания;
10) чувствительные РЛС;
11) пассивные датчики;
12) автоматическое распознавание целей;
13) активные фазированные антенные решетки;
14) управление сигнатурой;
15) объединение данных;
16) робототехнические комплексы с использованием средств искусствен­
ного интеллекта.
Первые технологии 1, 2 направлены на получение сверхчистых арсенидгаллиевых и других полупроводниковых материалов, дающих возможность обес­
печить серийное производство надежных сверхмалых интегральных устройств для
использования в перспективных высокоскоростных ЭВМ, сверхчувствительных
приемниках, различных устройствах автоматического управления и т.д.
Целью технологий 3, 4 является разработка надежных малогабаритных
оптических устройств памяти и обработки сигналов и данных, а также светово­
дов с низкими потерями для систем связи, навигации, радиолокации и т. д.
Следующие технологии 5-7 связаны с разработкой систем сверхскорост­
ной обработки данных за счет одновременного использования всех вычисли­
тельных средств в следующем поколении информационно-управляющих сис­
тем. Решение этой задачи должно сопровождаться созданием надежного про­
граммного обеспечения как для распределенной ЭВМ нового поколения, так и
для проверки концепций и конструкторских решений без построения физиче­
ских макетов и опытных образцов.
Технология 8 связана с разработкой микроволновых генераторов большой
мощности, применяемых в системах оружия для вывода из строя или разруше­
ния полупроводниковой техники различного назначения. В связи с развитием
СВЧ-оружия функционального поражения важной является технология разра­
ботки и эксплуатации средств защиты информационно-управляющих систем от
поражающих СВЧ-импульсов.
Технология 9 должна обеспечить получение электроэнергии устройствами
малого объема и массы, что имеет большое значение для различных средств
поражения.
Все остальные критические технологии напрямую связаны с разработкой
АК РЛДН следующего поколения. Разработка чувствительных РЛС подразуме­
вает создание радиолокационных датчиков, обеспечивающих обнаружение,
классификацию, распознавание и идентификацию малозаметных неизлучающих целей. Весьма важным является разработка пассивных неизлучающих дат­
чиков для систем обнаружения целей и контроля сигнально-помеховой обста­
новки. Следует подчеркнуть, что использование пассивных режимов работы
РЛС, лежащих в основе повышения скрытности, является принципиально не­
обходимым для повышения боевой эффективности и живучести АК РЛДН.
Технологии, направленные на создание систем автоматического распозна­
вания целей, основаны на разработке банка данных сигналов различных целей,
соответствующих архитектур бортовых ЦВМ, алгоритмов и методов обработки
сигналов для обнаружения, классификации и сопровождения целей в реальном
масштабе времени. Эти технологии имеют особенно важное значение для
АК РЛДН как в режимах «воздух-воздух», так и в режимах «воздухповерхность», обеспечивая достоверное дешифрирование радиолокационных
изображений целей.
Одними из самых важных для создания АК РЛДН нового поколения яв­
ляются технологии производства приемопередающих модулей активных
фазированных антенных решеток. Использование АФАР, давая возможность
формировать электронно-управляемые лучи различной формы, позволяет ре­
шить целый комплекс проблем, включающих:
1) возможность обеспечения высокоточного режима многоцелевого со­
провождения на базе программируемого обзора [13];
2) одновременную работу РЛС в нескольких режимах по воздушным и на­
земным целям;
3) управление мощностью излучения, адаптированное под конкретную це­
левую обстановку, и формирование многолучевых диаграмм направленности и
провалов в направлении источников помех для решения задач РЭП и контрРЭП;
Необходимо подчеркнуть, что технология АФАР [7] позволяет созда­
вать высокоэффективные РЛС с высокой живучестью при соблюдении двух
условий:
1) одновременной разработке комплекса алгоритмов и программ бортовой
РЛС, обеспечивающих реализацию всех преимуществ электронного способа
управления лучами антенны;
2) разработке высокоэффективных средств защиты от СВЧ-оружия функ­
ционального поражения.
Без учета последнего условия РЛС с АФАР будет представлять собой до­
рогостоящее изделие мирного времени.
Технология управления сигнатурой обеспечивает снижение демаски­
рующих признаков в радиолокационном, оптическом и акустическом диапазо­
нах для повышения живучести АК РЛДН [21].
Технологии объединения данных направлены на разработку систем со­
вместной обработки информации от всех источников, прежде всего, посту­
пающей от РЛС, ОЭС станций РТР, бортового комплекса радиоэлектронного
подавления, спутниковых и бортовых навигационных систем и т. д. Объедине­
ние данных от различных источников подразумевает и аппаратно-программ­
ную интеграцию всех бортовых информационных систем [33].
Усложнение условий функционирования АК РЛДН и использование разветв­
ленной сети информационных режимов обусловливают возрастание информаци­
онно-психологических нагрузок на экипаж и усиление ответственности за послед­
ствия принятых решений, что предопределяет усиление роли информационных
технологий на базе искусственного интеллекта. Системы искусственного интел­
лекта отличаются от обычных адаптивных систем прежде всего использованием
опыта наиболее подготовленных специалистов-профессионалов на базе рекомен­
даций, полученных в процессе экспертных оценок, способностью решать задачи, в
которых отсутствуют четко формализованные правила переработки информации,
и способностью обучаться в процессе функционирования.
В последнее время в США интенсивно развивается технология создания
глобальных сетецентрических информационно-управляющих систем (см.
рис. 6.2) [14], в рамках которой важное место отводится АК РЛДН не только
как многоканальному источнику разнообразной информации, но и как много­
функциональному управляющему звену.
Необходимо подчеркнуть, что из всех выше рассмотренных критических
технологий для АК РЛДН наиболее важны технологии АФАР и распределен­
ных вычислительных систем.
Кроме того, все возрастающее значение приобретают технологии управ­
ления информационными потоками внутри АК РЛДН, достоверного высо­
коточного режима многоцелевого сопровождения на базе программируемого
обзора.
В заключение следует отметить, что в основе большинства критических тех­
нологий лежат научно-технические достижения страны-разработчика. Среди важ­
нейших научных направлений, являющихся теоретической базой передовых тех­
нологий, необходимо прежде всего выделить теоретические основы пространст­
венно-временной обработки сигналов, системный анализ, статистическую теорию
оптимального управления, теорию распознавания образов, теорию оптимального
оценивания фазовых координат и параметров процессов и систем и теорию приня­
тия решений. До недавнего времени применение перспективных многомерных ал­
горитмов обработки сигналов и управления, полученных на основе указанных
теорий, сдерживалось ограниченными возможностями вычислителей. Следует
подчеркнуть, что бурный рост производительности бортовых вычислительных
систем во многом снял ограничения на внедрение в практику более совершенных
алгоритмов обработки информации и управления.
6.4. Живучесть авиационных комплексов
радиолокационного дозора и наведения
Живучесть - одно из самых важных системных свойств информационноуправляющих систем, характеризует их способность выполнять свои функции
в условиях реальных воздействий среды и противодействия. Если ИУС облада­
ет низкой живучестью, т. е. не способна сохранять работоспособность в усло­
виях реальной боевой обстановки, то ее использование теряет смысл при лю­
бых, даже самых высоких, показателях эффективности функционирования [61].
Под живучестью обычно понимают способность системы противостоять
внешним негативным воздействиям и сохранять или восстанавливать работо­
способность при наличии отказов и повреждений [21].
Под живучестью авиационного комплекса радиолокационного дозора и
наведения понимается живучесть не только самолета-носителя, но и живучесть
наводимых ЛА.
Повышение живучести - одна из самых устойчивых тенденций развития
сложных информационно-управляющих систем военного назначения [5]. В об­
щем случае, обеспечение живучести таких систем предполагает снижение их
уязвимости к различного рода негативным внешним воздействиям, включая ог­
невое поражение и радиоэлектронное подавление, и возрастание способности
сохранять и восстанавливать работоспособность при наличии повреждений и от­
казов. Необходимо подчеркнуть, что в интегрированных радиоэлектронных
комплексах восстанавливаемость обеспечивается соответствующей реконфигу­
рацией структуры [33].
Как правило, необходимые показатели живучести обеспечиваются сово­
купностью разнообразных организационных, алгоритмических, конструктор­
ских и технологических решений.
К основным негативным внешним воздействиям, влияющим на живу­
честь АК РЛДН, относятся:
1) огневое поражение носителя наводимых ЛА, а также обслуживающего
персонала обычными средствами уничтожения военной техники;
2) огневое поражение работающих РЛС АК РЛДН и наводимых ЛА противорадиолокационными ракетами;
3) радиоэлектронное подавление средствами РЭБ [52];
4) подавление СВЧ-оружием функционального поражения [25, 28];
5) интенсивный маневр цели.
Основные направления повышения живучести, позволяющие противосто­
ять отмеченным негативным воздействиям, показаны на рис. 6.6.
Рис. 6.6
Общепринятыми способами защиты самолета-носителя АК РЛДН от ог­
невого поражения является использование специально выделяемых средств
прикрытия [5], включающих достаточно большое число истребителей и
средств РЭБ.
Снижение заметности РЛС и их носителей должно обеспечиваться ком­
плексом разносторонних мер, гарантирующих маскировку в оптическом и теп­
ловом диапазонах, а также использованием при разработке самолетов техноло­
гий «Стеле» и различного рода радиопоглощающих покрытий. Особую роль
среди этих мер играет повышение скрытности излучений РЛС, которая обеспе­
чивается использованием многодиапазонных сверхширокополосных сигналов с
перестройкой несущей от импульса к импульсу, адаптивным к дальности цели
управлением мощностью зондирующих сигналов, временной регламентацией
излучения с широким применением режимов прогноза (экстраполяции).
Одним из действенных приемов уменьшения времени зондирования и по­
вышения эффективности режимов экстраполяции является комплексирование в
составе АК РЛДН и наводимых ЛА измерителей различной физической природы
(радиолокационных, оптических, тепловых, инерциальных и т. д.). Аналогичную
роль играет использование информации от внешних источников: других самоле­
тов дальнего радиолокационного обнаружения, систем спутниковой навигации,
наземных радиомаяков и т. д. [15,20]. Следует отметить, что применение ком-
плексирования внутренних и внешних источников информации одновременно
позволяет улучшить показатели восстанавливаемости АК РЛДН при нанесении
ущерба огневыми средствами поражения, средствами РЭБ и СВЧ-оружием
функционального поражения.
Использование специализированных экспертных советующих систем
позволяет обслуживающему персоналу АК РЛДН повысить адаптацию процес­
сов боевого применения и автономность устранения отказов и повреждений, что
имеет особенно большое значение для обеспечения живучести бортовых инфор­
мационно-управляющих систем. Наиболее эффективны экспертные советующие
системы в ситуациях, которые не поддаются формализованному описанию.
Одно из важных направлений снижения уязвимости ИУС к негативным
воздействиям - снижение чувствительности к ним, которое может быть реализо­
вано различными способами. Оно имеет два направления: уменьшение чувстви­
тельности к воздействию непреднамеренных и преднамеренных помех и умень­
шение чувствительности к поражающему действию СВЧ-оружия функционально­
го поражения. Вследствие особой важности данного направления оно будет
обсуждено отдельно.
Перспективным способом снижения интегральной чувствительности РЛС
к различного рода возмущениям является ее учет при синтезе алгоритмов,
совместно наилучших по точности, чувствительности и затратам на управление
[40]. Достоинство таких алгоритмов состоит в универсальности, позволяющей
получить одновременно снижение чувствительности систем к возмущениям
различной физической природы.
Значительную роль в обеспечении живучести АК РЛДН играет его спо­
собность устойчиво функционировать в условиях помех. В общем плане
принципы управления АК РЛДН в динамике конфликта со средствами радио­
электронного подавления рассмотрены в [11, 12]. Анализ средств РЭП и наи­
более опасных видов помех [53] позволяет прийти к следующим заключениям.
Увеличение числа применяемых помех, их различных комбинаций и су­
щественное возрастание их «сигналоподобности» сводит на нет концепцию
«каждой помехе - свое средство обнаружения (алгоритм) и защиты». В связи с
этим остановимся на некоторых способах и средствах помехозащиты, непо­
средственно влияющих на живучесть АК РЛДН.
П е р в ы й с п о с о б базируется на создании единого узла распозна­
вания сигнально-помеховой обстановки с использованием интеллектуальных
антенных решеток [37] и тонкого спектрального анализа с дальнейшим при­
менением компенсации установленной группы помех на основе алгоритмов
теории систем со случайной структурой и ситуационного управления.
В т о р о й с п о с о б базируется на более широком внедрении скрытных
полуактивных режимов работы РЛС, основанных на обработке сигналов, отра­
женных от целей, облучаемых другими РЛС, и пассивных режимов, использую-
щих сигналы постановщиков помех и других источников излучения. Необходимо
отметить, что в последнем случае при использовании однопозиционной пассивной
РЛС удовлетворительная точность оценивания дальности и скорости сближения с
целью достигается через 50...60 с полета самолета-носителя при его достаточно
интенсивном маневрировании по курсу. Более приемлемо применение пассивных
двухпозиционных систем наведения, обеспечивающих практически мгновенное
оценивание всех требуемых координат [42].
Т р е т и й с п о с о б базируется на активной помехозащите, суть кото­
рой состоит в игровом использовании своих средств РЭБ и РЛС для ввода про­
тивника в заблуждение.
Защита электронной полупроводниковой аппаратуры РЛС от сверхмощ­
ных короткоимпульсных СВЧ-излучений может проводиться за счет сово­
купности специальных устройств, тактических приемов, организационных ме­
роприятий и режимов работы, автоматически включающихся или своевремен­
но применяющихся при возникновении угрозы поражения от указанных
излучений. В связи с этим способы защиты от воздействия сверхмощных СВЧимпульсов могут быть отнесены к технологическим, схемно-конструктивным и
организационным.
Основной принцип, который должен соблюдаться при организации защи­
ты РЛС от воздействия СВЧ-импульсов сводится к тому, что все защитные
устройства и действия должны оказывать минимальное влияние на выполнение
РЛС АК РЛДН возложенных на нее функциональных задач. Защите способст­
вует применение уже на этапе проектирования заведомо стойких к воздейст­
вию мощных СВЧ-импульсов элементов и компонентов, а также всего того, что
ослабляет наводимые напряжения и токи в цепях электронных систем в наибо­
лее чувствительных узлах. Защиту РЛС от сверхмощных короткоимпульсных
излучений целесообразно обеспечивать на нескольких уровнях.
Должна быть предусмотрена «грубая» защита. Под ней понимается экра­
нирование чувствительных узлов, замена проводных линий связи световодами,
установка разрядников во входных цепях. Устройства «грубой» защиты при
определенных условиях способны существенно снизить уровень мощности
СВЧ-импульсов, проникающих к чувствительным элементам и устройствам
РЛС. Однако «грубая» защита не всегда может понизить проникающую к чув­
ствительным элементам СВЧ-мощность до значений, меньших критериального
уровня поражения этих элементов [25]. Поэтому желателен уровень защиты,
который может быть обеспечен при помощи фильтров и корректирующих це­
пей. Такие устройства в принципе могут совмещать функции защиты с основ­
ными функциями работы РЛС и оптико-электронных систем АК РЛДН. Весьма
эффективным средством защиты ИУС от СВЧ-оружия ФП является использо­
вание во входных цепях СВЧ-модулей на базе сверхминиатюрных электрова­
куумных приборов.
Следующий уровень защиты предполагает разработку тактических приемов
противодействия оружию функционального поражения. Такие приемы могут
быть достаточно разнообразными, но главное, чтобы они не были шаблонными.
Специальные меры защиты от оружия ФП противника должны дополнять­
ся традиционными для радиолокации методами повышения помехозащищен­
ности, из которых наиболее эффективными будут, по-видимому, методы по­
вышения скрытности работы. Необходимо подчеркнуть, что требования по­
вышения скрытности и защищенности от средств РЭБ и СВЧ-оружия
функционального поражения требуют принятия радикальных мер по разра­
ботке более скрытных методов наведения, основанных на применении много­
позиционных принципов построения систем наведения с использованием по­
луактивных и пассивных режимов работы РЛС АК РЛДН и наводимых само­
летов [28].
Выявление угроз и их ликвидация - одни из важнейших направлений
повышения живучести АК РЛДН. В рамках этого направления можно выделить
три взаимосвязанных приема. Первый прием связан с увеличением дальности
обнаружения пуска авиационных ракет противника за счет использования РЛС.
Второй прием основан на повышении достоверности ранжирования угроз по
степени их важности, а третий прием базируется на непосредственном устра­
нении угроз, направленных на поражение АК РЛДН и наводимых ЛА.
Применение РЛС для регистрации факта пуска ракет позволяет обеспе­
чить по сравнению с оптическими средствами всепогодность и значительно
увеличить дальность его обнаружения. Один из перспективных приемов реше­
ния этой задачи - обнаружение фактов отделения ракеты от носителя и набора
ею скорости на основе тонкого спектрального анализа сигналов при длитель­
ном когерентном накоплении.
Рациональным способом повышения достоверности ранжирования угроз
(целей) по степени их важности является использование экстремальных линей­
но-квадратичных функционалов качества [50], дающих возможность оценить
не только опасность средства поражения, но и его благоприятность для унич­
тожения по существенно большему числу признаков.
В наиболее общем виде решающее правило на основе такого функционала
можно представить в виде соотношений
(6.1)
(6.2)
(6.3)
285
где I3 и IH - функционалы, определяющие степень опасности (защиты) цели и ее
благоприятствования нападению;
- номер цели; а3 и ан - весовые коэф­
фициенты факторов опасности цели и благоприятствования нападению, причем
ι
- соответственно априорное значение и оценка
того или иного параметра, характеризующего опасность для нас j-й цели; SnjH и
- априорное значение и оценка того или иного параметра, харак­
теризующего благоприятность нападения на j-ю цель;
производные соответствующих параметров и их оценок, позволяющие учесть
тенденции изменения обстановки;
- весовые коэффициен­
ты, учитывающие важность того или иного параметра для процедуры ранжиро­
вания в целом; Τ - временной интервал обращения к цели либо отрезок време­
ни от измерения до момента принятия решения о важности целей, которые
ранжируются по мере возрастания (6.1).
Если идентифицированная цель имеет лучшие летно-технические показатели
и показатели средств поражения, то в функционале (6.1) большую роль при его
минимизации играет слагаемое 13 (6.2)
, которое учитывает требование
обеспечения собственной безопасности. В противном случае большую роль играет
слагаемое 1н (6.3) (а н < а 3 ) , характеризующее возможность нападения.
Следует отметить, что использование функционала (6.1)-(6.3) дает возмож­
ность достаточно просто адаптировать процедуру ранжирования целей по степе­
ни их важности под тип носителя и решаемую им задачу, манипулируя составом
слагаемых и весовыми коэффициентами, учитывающими их важность.
Среди различных вариантов устранения угроз для АК РЛДН и наводимых
ЛА наряду с непосредственным уничтожением средств поражения целесооб­
разно применять свои системы РЭП и СВЧ-оружие ФП. Кроме того, весьма
перспективным являются специальные режимы уклонения АК РЛДН и наво­
димых ЛА от ракет противника [46].
Режимы уклонения от средств поражения могут быть реализованы дву­
мя способами.
С п о с о б 1 основан на использовании различного рода маневров, при
которых возникают вторые и более высокие производные законов изменения
дальности, скорости и бортовых пеленгов. При таких маневрах существенно
ухудшаются условия обнаружения лоцируемых с ракеты объектов [32] и воз­
никают нарастающие динамические ошибки сопровождения, приводящие к
его срыву [46].
С п о с о б 2 основан на использовании резких маневров уклоняемых
ЛА на конечном участке наведения ракет. Вследствие инерционности системы
управления ракетой (СУР) и самой ракеты она не успевает до окончания само­
наведения отработать изменения пространственного положения поражаемого
объекта [38].
Следует отметить, что маневр целей, лоцируемых с АК РЛДН, и наводи­
мых объектов может приводить к аналогичным потерям. В связи с этим необ­
ходимо принимать специальные меры для уменьшения влияния маневров це­
лей на показатели наших систем сопровождения.
Достаточно эффективными средствами, позволяющими снизить негатив­
ное влияние маневров, являются увеличение размерности вектора оцениваемых
координат с включением в него составляющих ускорений [44] и специальные
адаптивные алгоритмы сопровождения [45].
Использование АФАР позволяет улучшить целый комплекс характеристик,
непосредственно влияющих на живучесть РЛС и АК РЛДН. Из этих характери­
стик необходимо отметить повышение пространственной скрытности за счет ор­
ганизации программируемого обзора с квазислучайным законом изменения на­
правления просмотра зоны ответственности [13]. Кроме того, по сравнению с дру­
гими типами антенн, АФАР сама по себе имеет более высокую живучесть за счет
большого числа приемопередающих модулей. Так, например, в перспективных
бортовых РЛС используются АФАР с несколькими тысячами элементов [54]. При
таком числе элементов выход из строя 10 % из них практически не повлияет на
тактико-технические показатели РЛС.
Необходимо, однако, подчеркнуть, что использование АФАР в чисто полу­
проводниковом исполнении нецелесообразно из-за уязвимости к СВЧвоздействиям функционального поражения.
Задача повышения защищенности РЛС АК РЛДН и наводимых ЛА от
противорадиолокационных ракет (ПРР) - одна из самых важных в комплек­
се проблем повышения живучести. При решении этой задачи могут использо­
ваться как активные, так и пассивные методы [47]. Суть активных методов сво­
дится к оказанию поражающих воздействий либо на самолет-носитель, либо на
саму ПРР. Суть пассивных методов состоит в повышении скрытности всех
бортовых источников радиоизлучений.
Одним из самых эффективных способов повышения живучести систем
управления вооружением является использование многопозиционного прин­
ципа построения, дающего возможность реализовать многоканальные систе­
мы наведения.
Под многопозиционной системой многоканального наведения понимается
совокупность функционально связанных систем наведения нескольких про­
странственно разнесенных объектов управления, измерители которых образу­
ют единую информационную систему [56].
Особое значение для повышения живучести АК РЛДН имеет увеличение на­
дежности его функционирования, связанное с использованием резервирования [61]
и управляемой реконфигурации ИУС [33]. Поскольку повышение его живучести за
счет резервирования аппаратных средств широко известно, то далее более подробно
остановимся на повышении живучести программного обеспечения (ПО).
Под живучестью ПО понимается его свойство правильно выполнять функ­
ции в полном объеме или частично в условиях появления входных данных, непре­
дусмотренных технической документацией, а также при разрушении элементов
аппаратурной части вычислительной системы [59]. Следует отметить, что исполь­
зование избыточных ресурсов ПО при отказах аппаратуры позволяет восстановить
заданную работоспособность, допуская некоторую деградацию системы относительно менее существенных функций при условии сохранения ее основного целе­
вого назначения.
Необходимо подчеркнуть, что природа отказов аппаратуры и ПО различна.
Если причиной отказов и сбоев аппаратуры являются производственные дефекты,
ухудшение параметров комплектующих элементов из-за износа или старения, то
причины отказов ПО - трудно прогнозируемые и необнаруживаемые ошибки,
внесенные на этапе проектирования.
Проблема живучести ПО чрезвычайно важна, поскольку оно намного
сложнее аппаратуры, а его стоимость часто превышает стоимость аппаратуры.
Для обеспечения требуемого уровня живучести ПО следует:
1) свести к минимуму возможные ошибки на этапе разработки;
2) обеспечить программно-техническую реализацию методов и средств
повышения устойчивости к ошибкам при эксплуатации [57];
3) обеспечить коррекцию цели функционирования ПО при утрате возмож­
ности выполнения первоначально заданного объема функций.
Устойчивость к ошибкам ПО, под которой понимается его способность
продолжать функционирование при наличии ошибок, обеспечивается реали­
зацией динамической избыточности и изоляцией ошибок. Для обеспечения ди­
намической избыточности применяют метод многовариантного программиро­
вания, суть которого состоит в независимой генерации нескольких функцио­
нально эквивалентных программ (версий) для одних и тех же условий.
Изоляция ошибок заключается в сведении к минимуму последствий рас­
пространения ошибок и защите каждой из программ в системе от ошибок дру­
гих программ. Решение этой задачи связано с необходимостью обнаружения и
исправления ошибок. Известным приемом решения этой задачи является ис­
пользование избыточных кодов с обнаружением ошибок и их обнаружением и
исправлением. Следует, однако, отметить, что этот прием требует значительно­
го усложнения программ вычислений.
В свою очередь, при наличии сбоев и отказов (разрушения) аппаратуры
могут возникать искажения [57]: 1) кодов операций; 2) адресной информации;
3) констант в структуре программ; 4) констант, используемых при вычислени­
ях; 5) вычисляемых значений величин в процессоре; 6) засылаемых и храни-
|
мых переменных в ОЗУ; 7) входной и выходной информации, поступающей по
линии связи.
Необходимо подчеркнуть, что первые три типа искажений изменяют про­
грамму, в то время как остальные искажают данные.
В общем случае последовательность операций по парированию ошибок ПО и
сбоев и отказов в аппаратуре сводится к поиску способов выявления ошибочных
результатов и вариантов формирования выходного сигнала вместо ошибочного; к
оценке ухудшения качества функционирования систем более высокого уровня ие­
рархии и принятию решения на конкретную коррекцию [57].
Среди этой последовательности наиболее значимым является выявление
ошибок, способы обнаружения которых можно разделить на три уровня:
1) операционный, 2) функциональный, 3) системный.
Операционный уровень реализует система контроля БЦВМ, которая может
обнаружить, а в специально предусмотренных случаях и исправить ошибки
хранения информации, ее передачи и обработки.
Функциональный уровень позволяет выявлять неправильные результаты вы­
числений управляющих сигналов, используя алгоритмические или эвристиче­
ские методы. Простейший способ обнаружения нарушений на функциональном
уровне - это стробирование, при котором проводится оценка допустимого значе­
ния сформированного сигнала по информации о сигнале на предыдущем такте и в
случае превышения допустимого отклонения - использование предыдущего
управляющего сигнала. Применяются и более сложные способы выявления и кор­
рекции нарушений функционирования функционального программного обеспече­
ния (ФПО), что, однако, приводит к существенному росту потребляемых ресурсов
БЦВС[51].
Системный уровень — уровень
операционной системы - позволяет
контролировать ход вычислительного
процесса, последовательность реше­
ния задач и их завершенность.
Специфической
особенностью
современных АК РЛДН является
пропадание целей в мертвых зонах и
зонах доплеровской режекции [9, 27]
(рис. 6.7,д,б). Для уменьшения влия­
ния мертвых зон в вертикальной
плоскости (рис. 6.7,6) необходимо
использовать многобазовую антен­
ную систему. Снижение влияния зон
хвостового затенения [9] и зон допле­
Рис. 6.7
ровской режекции [27] (рис. 6.7,а)
можно обеспечить путем совместной работы нескольких АК РЛДН в рамках
единой многопозиционной системы наведения.
Следует отметить многообразие причин снижения живучести, сложность
решения задач ее улучшения и необходимость комплексного решения этой
проблемы.
6.5. Режимы работы авиационных комплексов
радиолокационного дозора и наведения
нового поколения
В общем случае АК РЛДН представляет собой дорогостоящее изделие
длительного пользования, при разработке которого в максимальной степени
учитываются как достижения предыдущего поколения комплексов этого типа,
так и необходимость наращивания его возможностей. Поэтому в АК РЛДН но­
вого поколения необходимо сохранить режимы, рассмотренные в 5.1, улучшив
показатели их эффективности, надежности и живучести. В то же время необхо­
димо использование новых режимов, обусловленных появлением новых видов
боевой техники, новых тактических приемов, требованиями экономичности и
возможностями новых технологий. Ниже внимание в основном будет уделено
особенностям новых режимов системы наведения и их влиянию на режимы ра­
боты информационных систем.
Анализ материала, изложенного в 6.1-6.4, позволяет прийти к следующим
заключениям.
Требования экономичности и универсальности предопределяют разра­
ботку многофункционального комплекса, обеспечивающего работу как по на­
земным, так и воздушным объектам и осуществляющего управления летатель­
ными аппаратами различных классов в процессе полета по маршруту, наведе­
ния на воздушные и наземные цели, а также управления сопрягаемыми ком­
плексами аналогичного типа, беспилотными летательными аппаратами,
самолетами-ретрансляторами, топливозаправщиками и т. д.
Эта специфика обусловливает необходимость использования в АК РЛДН
двух групп режимов, которые условно можно назвать «воздух-воздух» и
«воздух-поверхность». Однако независимо от группы в каждой должны быть
режимы:
а) обнаружения, позволяющие получить общее представление о воздуш­
ной и наземной обстановке и выполнить государственное опознавание по
принципу «свой-чужой» [34];
б) многоцелевого автоматического сопровождения, в которых выполняют­
ся ранжирование целей по степени их важности и формирование оценок всех
фазовых координат, используемых для получения сигналов управления наво­
димыми ЛА и выдачи команд целеуказания сопрягаемым объектам;
в) управления ЛА в рамках решаемых оперативных и тактических задач [22].
Функциональные связи между составными частями ИУС АК РЛДН пока­
заны на упрощенной структурной схеме, приведенной на рис. 6.8, где САД системы автономных датчиков, формирующие оценки параметров собственно­
го движения; КРУ - командная радиолиния управления, через которую осуще­
ствляется передача команд на наводимые ЛА (см. 5.5); СРТР - станция радио­
технической разведки, осуществляющая обнаружение источников радиоизлу­
чений, в том числе постановщиков помех, и оценивание параметров
принимаемых сигналов; РЛС, ОЭС и НС - радиолокационная, оптико-элект­
ронная и навигационные системы соответственно, решающие основные ин­
формационные задачи по обеспечению управления АК РЛДН и наведению ЛА;
КРЭБ - комплекс радиоэлектронной борьбы, который используется не только
для радиоэлектронного подавления РЛС противной стороны, но и совместно с
РЛС для организации так называемой активной помехозащиты, дающей воз­
можность бортовой РЛС получать информацию о цели в условиях применения
противником средств РЭП; ВВС - бортовая вычислительная система, решаю­
щая большую часть задач обработки информации и управления; БД - база дан­
ных; СИППР - система интеллектуальной поддержки принятия решения [5, 6],
Рис. 6.8
формирующая рекомендации для лиц боевого расчета; СНВЦ и СННЦ - сис­
темы наведения на воздушные и наземные цели; СУСЛА - система управления
сопрягаемыми летательными аппаратами, представляющая совокупность алго­
ритмов формирования команд целеуказаний и управления другими АК РЛДН,
самолетами-заправщиками, ретрансляторами и беспилотными летательными
аппаратами; СОУУ - система оценки и устранения угроз, содержащая алго­
ритмы ранжирования воздушных и наземных целей по степени их опасности на
основе информации, поступающей от РЛС, ОЭС и СРТР, и формирующая ко­
манды на управление истребителями прикрытия, на использование маневров
уклонения и применения собственного КРЭБ; АРМШС и АРМШН - автомати­
зированные рабочие места штурманов сопровождения целей и наведения, на
индикаторах которых отображается вся информация, используемая при сопро­
вождении и идентификации целей с учетом степени их опасности и благоприятствия для поражения и при принятии решений на управление АК РЛД и на­
водимыми самолетами и контроля выполнения задач.
Система наведения на воздушные цели представляет собой совокупность
алгоритмов, реализующих методы наведения управляемых ЛА на воздушные
объекты. Из этих методов можно выделить как традиционные методы погони,
маневра и перехвата, рассмотренные в 5.2.2, так и новые. Состав этих методов
и их взаимосвязи иллюстрирует рис. 6.9.
Рис. 6.9
Наведение групп ЛА выполняется посредством управления самолетами
командиров групп, которые осуществляют взаимодействия с остальными само­
летами группы либо голосом, либо посредством ТКС [5].
Необходимость обслуживания сверхманевренных и гиперзвуковых лета­
тельных аппаратов (ГЗЛА) приводит к использованию усовершенствованных
методов перехвата, в которых, как минимум, должны учитываться относи­
тельные ускорения целей и наводимых ЛА [44]. Это обстоятельство потребует
использования в информационных режимах БРЛС и ОЭС алгоритмов обнару­
жения маневров и оценивания вторых производных отслеживаемых координат.
Кроме того, потребности бессрывного сопровождения ГЗЛА приводят к необ­
ходимости принятия мер по расширению диапазона скоростей и ускорений ус­
тойчивой работы систем сопровождения целей и уменьшению временного ин­
тервала обращения к ним.
Необходимость повышения скрытности процедур наведения обусловлена
требованиями повышения их боевой эффективности и живучести. Для решения
этих задач могут быть использованы различные приемы как однопозиционного,
так и многопозиционного наведения с применением полуактивных и пассивных
режимов работы информационных систем; кроме того, могут быть использованы
и специальные приемы повышения скрытности передачи команд управления на
наводимые ЛА. Более подробно эти вопросы рассмотрены в п. 7.2.
Существенное возрастание номенклатуры воздушных радиоизлучающих
целей, включая постановщиков помех, предопределяют необходимость исполь­
зования специальных методов наведения на них, учитывающих особенности их
перемещения в пространстве. Следует отметить, что при перехвате движущих­
ся воздушных источников радиоизлучений (ИРИ), могут быть использованы
как однопозиционные, так и многопозиционные системы наведения.
Однако в любом случае для всеракурсного перехвата движущихся воз­
душных объектов необходимо иметь достаточно точные оценки дальности и
скорости, что является непростой задачей в условиях, когда в пассивном режи­
ме измеряются только угловые координаты ИРИ. Использование однопозиционых систем наведения требует выполнения достаточно длительного маневра
наводимого самолета и не позволяет получить высокую точностью оценивания
дальности и скорости.
Более эффективным является использование многопозиционных (как пра­
вило, двухпозиционных) систем наведения, дающих возможность практически
мгновенно сформировать более точные оценки дальности и скорости. Необхо­
димо, однако, подчеркнуть, что для повышения точности оценивания дально­
сти и скорости один или оба носителя должны выполнять специальный маневр
[42]. Алгоритмы траекторного управления, направленные не только на решение
основных задач перехвата, но и на получение траекторий, обеспечивающих
наилучшие условия для функционирования информационных систем, получи­
ли название алгоритмов траекторного управления наблюдением [39]. Исполь-
ование этих алгоритмов дает возможность улучшить показатели эффективно­
сти систем наведения практически без улучшения тактических и технических
юказателей БРЛС и ОЭС.
Следует, однако, отметить, что использование многопозиционного прин­
ципа наведения, давая существенное улучшение показателей эффективности и
кивучести, приводит к значительному усложнению алгоритмов управления.
Это усложнение предопределено появлением еще одного более высокого ие»архического управленческого уровня, усложнением процедур взаимной син;ронизации и обмена информацией. Кроме того, использование многопозици>нных систем наведения приводит к значительному ухудшению показателей
1Кономичности, поскольку требует, как минимум, удвоенного расхода топлива
ι ресурса носителей и информационных систем.
Одним из способов устранения угроз является обход зон тактического
[ревосходства воздушного противника. Суть этого способа состоит в заблаго;ременном обходе областей пространства, в которых наши ЛА могут быть об[аружены информационными средствами противника, превосходящего нас лию численностью, либо по летно-техническим характеристикам самолетов и
>ружия. Следует подчеркнуть, что для использования этого приема необходи10 иметь неизлучающие пассивные средства обнаружения большой дальности
ι высокодостоверные алгоритмы идентификации обнаруженных целей, вплоть
(о их типа. Другим способом устранения угроз является использование манев)ов уклонения [46].
Спецификой наведения ЛА на большие группы неразрешаемых целей яв[яется необходимость информации о пространственных размерах группы. При
[аличии такой информации наведение самолетов осуществляется на головную
[асть группы, а наведение средств поражения - на геометрический или энергеический центр группы. Рациональным приемом высокоточного индивидуальюго наведения является использование траекторного управления наблюдени!М, обеспечивающего разрешение целей в плотной группе [41].
Перспективным, но достаточно сложным методом повышения эффективюсти наведения является использование так называемого метода комбиниро1анного наведения, базирующегося как на командах, поступающих от АК
'ЛДН, так и на сигналах управления, формируемых на самом наводимом само[ете с использованием своих информационных средств. Сложность такого
гоиема состоит в необходимости применения универсального метода наведешя, инвариантного к пространственному положению источников информации.
Система наведения на наземные цели представляет совокупность алгоштмов управления Л А в процессе их наведения на наземные объекты. В обцем случае наводимыми ЛА могут быть самолеты-штурмовики, фронтовые и
(альние бомбардировщики и многофункциональные истребители при работе
ю наземным целям, а также ударные БЛА [3]. Управление этими самолетами
юуществляется в процессе их полета по маршруту в район цели и далее непо-
средственно в область применения средств поражения. Информационные связи
между различными методами наведения, используемыми в режимах «воздухповерхность», показаны на рис. 6.10.
Рис. 6.10
При управлении ЛА на маршруте используются в основном методы авто­
номного наведения. Суть этих методов состоит в том, что в процессе полета
команды управления формируются на самих ЛА в соответствии с тем или
иным методом наведения. Из этих методов наиболее употребительны мар­
шрутный, курсовой и путевой [45].
При маршрутном методе наведение выполняется по жестко фиксирован­
ной траектории полета (ортодромии), намечаемой заранее до полета. Управле­
ние при этом методе сводится к регистрации отклонений от программной тра­
ектории и их устранению. Суть курсового метода состоит в совмещении про­
дольной оси наводимого ЛА с направлением на цель. При использовании
путевого метода с направлением на цель совмещается вектор путевой скоро­
сти управляемого самолета. Управляющая роль АК РЛДН сводится к периоди­
ческой передаче на борт наводимых ЛА корректирующих команд или передаче
команд на изменение маршрута либо при наведении на новые цели, либо при
выявлении опасных зон, обусловленных обнаружением наземных систем ПВО
противоборствующей стороны. Примерный вид траектории полета управляе­
мого ЛА при обходе опасных зон иллюстрируется рис. 6.11, на котором штри­
ховой линией показана первоначальная траектория полета.
Рис. 6.11
Специфическим режимом работы АК РЛДН является формирование ко­
манд радиокоррекций для ракет большой дальности пуска при их наведении на
движущиеся корабли. Следует отметить, что команды радиокоррекции могут
передаваться на борт управляемого ЛА и на этапе его самонаведения, при ко­
тором, как правило, используются разновидности метода последовательных
упреждений [44]. При этом методе в процессе формирования сигналов управ­
ления используются взвешенные ошибки наведения по бортовым пеленгам це­
ли и угловой скорости линии визирования. Последнее позволяет учесть влия­
ние бокового ветра и движение цели. Процедура передачи команд с АК РЛДН
на борт самонаводящегося бомбардировщика особенно актуальна при подавле­
нии его БРЛС активными помехами.
Методы наведения групп ударных самолетов, как и при наведении на воз­
душные цели, сводятся к управлению самолетом командира группы. Специфи­
кой управления ударными беспилотными ЛА является передача на их борт ко­
манд целеуказания информационным системам, контроль правильности «за­
хвата» ими нужной цели. Это дает возможность по полученному от них на
борту АК РЛДН телевизионному или радиолокационному изображению района
цели сформировать и передать на борт БЛА команды управления. В наиболее
простом варианте для решения этих задач могут быть использованы трехто­
чечные методы наведения [46], учитывающие динамику взаимного перемеще­
ния пункта управления, наводимого ЛА и цели.
Методы наведения с повышенной скрытностью базируются на тех же
принципах, что и при наведении на воздушные цели. Наиболее рациональным
является использование методов пассивной локации как при однопозиционном,
так и многопозиционном наведении. Спецификой методов наведения на на­
земные ИРИ, отличающей их от типовых методов, является необходимость на­
ведения на движущиеся излучатели, размещаемые не только на кораблях, но и
на мобильных наземных РЛС, работающих в движении. Особенностью исполь­
зования двухпозиционных систем наведения является возможность примене­
ния полуактивных режимов работы, при которых первичным источником ин­
формации являются сигналы подсвета, излучаемые АК РЛДН и отражаемые
целью. Особенно актуален такой способ при управлении высокоточными сред­
ствами поражения, использующими синтезирование апертуры антенны на ос­
нове принимаемого сигнала. В перспективе полуактивный режим может быть
использован и при маловысотном полете.
В заключение отметим, что разработка основных направлений формиро­
вания технического облика перспективного АК РЛДН требует многофакторно­
го учета условий боевого применения, критических технологий создания, но­
вейших методов испытаний и эффективных методов эксплуатации и модерни­
зации. Примеры решения таких задач представлены в гл. 7 и 8.
Литература
1. Алексеев Ю.Я., Викулов О.В., Меркулов В.И. и др. Способы и средства помехозащиты радио­
локационных измерителей дальности и скорости в режимах автосопровождения. - Зарубеж­
ная радиоэлектроника. Успехи современной радиоэлектроники, 2000, № 1.
2. Алексеев Ю.Я., Ефимов В.А., Меркулов В.И. и др. Помехозащищенность авиационных радио­
локационных систем. - М. : ВВИА им. проф. Η. Ε. Жуковского, 2001.
3. Антонов Д.Α., Бабич P.M., Балыко ЮЛ. и др. Авиация ВВС России и научно-технический
прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А. Федосова. М.: Дрофа, 2006.
4. Ануфриев О.Н., Герасимов А.А., Меркулов В.И. и др. Ударные беспилотные летательные
аппараты и их радиолокационные системы. - Успехи современной радиоэлектроники,
2007, № 7 .
5. Бабич В.К., Баханов Л.Е., Карпеев В.И. и др. Авиация ПВО России и научно-технический
прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А. Федосова. М.: Дрофа, 2001.
6. Бортовые интеллектуальные системы. Авиационные системы. - Информационно-измери­
тельные и управляющие системы, 2006, т. 4, № 8.
7. Братчиков А.И., Васин В.И, Василенко О.О. и др. Активные фазированные антенные решет­
ки / Под ред. Д.И Воскресенского и А.И Канащенкова. - М.: Радиотехника, 2004.
8. Буров СВ., Чудненко В.А. Противорадиолокационные ракеты. - М.: МИРЭА, 1994.
9. Вайпан С.Н., Вакуленко А.А., Долгополое А.П., Матус В.И. Обобщенный метод оценки ин­
формативности РЛС, размещаемой на летательном аппарате. - Радиотехника, 2003, №11·
10. Вайпан С.Н., Верба B.C., Долгополое А.П., Мирошниченко А.В. Методический подход к обос­
нованию принципа траекторного управления беспилотных летательных аппаратов с борта
АК РЛДН при обнаружении наземных целей. // Материалы XXX военно-научной конферен­
ции. - Тверь, 2 ЦНИИ МО, 2004.
11. Вакуленко А.А., Верба B.C., Дод В.Н. Организация конфликтно-устойчивого управления ин­
тегрированной радиоэлектронной системой в динамике конфликта со средствами радиоэлек­
тронного подавления. - Радиотехника, 2006, № 1.
12. Вакуленко Α.Α., Верба B.C., Дод В.Н. Принципы управления многофункциональными интег­
рированными радиоэлектронными системами в динамике конфликта со средствами радио­
электронного подавления. - Радиотехника, 2006, № 6.
13. Васильев О.В., Меркулов В.К, Карев В.В. Управляемый радиолокационный поиск воздушных
целей. - Зарубежная радиоэлектроника. Успехи современной радиоэлектроники, 2002, № 1.
14. Верба B.C. Авиационный комплекс радиолокационного дозора и наведения как элемент гло­
бальной сетецентрической системы. - Радиотехника, 2008, № 9.
15. Верба B.C. Метод управления информативностью авиационного комплекса, взаимодейст­
вующего с разнородными потребителями информации. - Радиотехника, 2006, № 1.
16. Верба B.C. Обнаружение наземных объектов. Радиолокационные системы обнаружения и на­
ведения воздушного базирования. - М.: Радиотехника, 2007.
17. Верба B.C. Особенности формирования технического облика радиотехнических комплексов
многофункциональных информационно-управляющих средств воздушного базирования. Радиотехника, 2005, № 5.
18. Верба B.C. Перспективы развития систем и комплексов разведки, дозора и управления авиа­
ционного базирования и проблемы по облегчению их создания. - Радиопромышленность,
2006, вып. 1.
19. Верба B.C. Тенденции развития авиационных и космических средств информационной раз­
ведки и дозора. - Наукоемкие технологии, 2004, № 8,9.
20. Верба B.C. Управление информационными возможностями многофункциональных бортовых
радиолокационных комплексов. - Радиотехника, 2007, № 10.
21. Верба B.C., Гандурин В.Α., Меркулов В.И. Живучесть авиационных комплексов радиолокаци­
онного дозора и наведения. - Информационно-измерительные и управляющие системы, 2008,
т.6,№3.
22. Верба В. С, Гандурин В.А., Меркулов В.И. Стратегические, оперативные и тактические фак­
торы, влияющие на облик авиационного комплекса радиолокационного дозора и наведения. Информационно-измерительные и управляющие системы, 2008, т. 6, № 5.
23. Верба B.C., Гандурин В.Α., Меркулов В.И. Экономические факторы влияющие на облик авиа­
ционного комплекса радиолокационного дозора и наведения. - Информационно-измери­
тельные и управляющие системы, 2008, т. 6, № 7.
24. Верба B.C., Меркулов В.И., Самарин О.Ф. Технологические факторы, влияющие на облик
авиационного комплекса дозора и наведения нового поколения. - Информационноизмерительные и управляющие системы, 2008, т. 6, № 10.
25. Викулов О.В., Добыкин В Д., Меркулов В.И. и др. Современное состояние и перспективы раз­
вития авиационных средств радиоэлектронной борьбы. - Зарубежная радиоэлектроника. Ус­
пехи современной радиоэлектроники, 1998, № 12.
26. Вопросы перспективной радиолокации / Под ред. А.В. Соколова. - М.: Радиотехника, 2003.
27. Гандурин В.Α., Кирсанов А.П. Особенности зоны обнаружения низколетящих воздушных
объектов доплеровской радиолокационной станции. - Радиотехника, 2007, № 10.
28. Гандурин В.Α., Меркулов В.И. Проблемы повышения скрытности наведения авиационных
комплексов. - Фазотрон, 2008, № 1,2.
29. Добыкин В.Д., Куприянов А.И., Пономарев В.Г., Шустов Л.Н. Радиоэлектронная борьба. Си­
ловое поражение радиоэлектронных систем. - М.: Вузовская книга, 2007.
30. Зуенко Ю., Коростелев С. Боевые самолеты России. - М.: Элакос, 1993.
31. Илъчук А.Р., Меркулов В.К, Слукин Г.П. и др. Алгоритмы автоматического сопровождения
целей в режиме обзора. - Радиотехника, 1999, №11.
32. Илъчук А.Р., Меркулов В.И., Самарин О.Α., Юрчик И.А. Влияние интенсивного маневрирова­
ния целей на показатели эффективности системы первичной обработки сигналов в бортовых
РЛС. - Радиотехника, 2003, № 6.
33. Интегрированные комплексы и системы / Под ред. В.П. Кутахова. - Радиотехника, 1996, № 9.
34. Канащенков А.И., Меркулов В.И, Герасимов Л.А. и др. Радиолокационные системы много­
функциональных самолетов. Т. 1. РЛС - информационная основа боевых действий много­
функциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных
сигналов / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2006.
35. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционно­
го зондирования Земли / Под ред. ГС. Кондратенкова. - М.: Радиотехника, 2005.
36. Краткий энциклопедический словарь по радиоэлектронике и радиопромышленности / Под
ред. В.Н. Саблина. - М.: Диво, 2006.
37. Кузьмин СЗ. Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000.
38. ЛоккА.С. Управление снарядами. - М : Гостехтеориздат, 1957.
39. Малышев В.В., Красильщиков М.Н., Карпов В.И. Оптимизация наблюдения и управления ле­
тательных аппаратов. - М.: Машиностроение, 1989.
40. Меркулов В.И. Алгоритм оценки помехоустойчивости оптимальных радиоэлектронных сле­
дящих систем по критерию совокупного информационного и энергетического ущерба. - Ра­
диотехника и электроника, 1989, т. 36, № 4.
41. Меркулов В.И. Улучшение разрешающей способности бортовой РЛС по углу путем траекторного управления наблюдением. - Радиотехника, 2003, № 1.
42. Меркулов В.И. Управление пассивными двухпозиционными РЛС в режиме наведения на радиоизлучающую воздушную цель. - Радиотехника, 2006, № 6.
43. Меркулов В.И, Дрогалин В.В., Лепин В.Н. и др. Авиационные системы радиоуправления. Т. 1.
Принципы построения систем радиоуправления. Основы синтеза и анализа / Под ред. А.И. Ка­
нащенкова и В.И. Меркулова. - М.: Радиотехника, 2003.
44. Меркулов В.И, Дрогалин В.В., Богачев А.С. и др. Авиационные системы радиоуправления. Т. 2.
Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. М. : Радиотехника, 2003.
45. Меркулов В.И., Перов А.И, Саблин В.Н. и др. Оценивание дальности и скорости в радиолока­
ционных системах Ч. 1 / Под ред. А.И. Канащенкова и В.И. Меркулова. - М. : Радиотехника,
2004.
46. Меркулов В.И, Чернов B.C., Дрогалин В.В. и др. Авиационные системы радиоуправления.
Т. 3. Системы командного радиоуправления. Автономные и комбинированные системы наве­
дения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2004.
47. Небабин В.Г., Кузнецов И.Б. Радиоэлектронные средства противорадиолокационных ракет. Зарубежная радиоэлектроника, 1990, № 7.
48. Нилов М.А., Безуглов А.В., Быстрое НЕ., Ушенин А.Б. Построение радиолокаторов со слож­
ными квазинепрерывными сигналами. - Радиотехника, 1997, № 8.
49. ОнищукА. Радиолокационные станции для беспилотных летательных аппаратов. - Фазотрон,
2007, № 3,4.
50. Пат. 2190863 Российская Федерация. Способ ранжирования целей /Дрогалин В.В., Меркулов В.И.,
Самарин О.Ф. и др.
51. Пат. 2236750 Российская Федерация. Способ преобразования сигналов в цифровую форму /
Дрогалин В.В., Матюшин А.С, Меркулов В.И. и др.
52. Перспективные военные разработки: Авиастроение-Экспресс-информация, 1989, № 43.
53. Перунов Ю.М., Фомичев В.И., Юдин Л.М. Радиоэлектронное подавление информационных
каналов систем управления оружием / Под ред. Ю.М. Перунова. - М.: Радиотехника, 2003.
54. Программа JSF и ее влияние на авионику боевых самолетов пятого поколения / Под ред.
Е.А. Федосова. - М.: НИЦ ГосНИИАС, 2000.
55. Родзивилов В.А., Черных М.М., Кузубов В.В. и др. Когерентное последовательное обнаруже­
ние в импульсно-доплеровских РЛС. - Радиотехника, 1998, № 4.
56. Саблин В.Н., Викулов О.В., Меркулов В.И. Авиационные многопозиционные радиолокацион­
ные системы многоканального наведения. Разведывательно-ударные комплексы. - Зарубеж­
ная радиоэлектроника. Успехи современной радиоэлектроники, 1998, № 8.
57. Самарин О.Ф. Устойчивость программного обеспечения систем управления реального вре­
мени к ошибкам программ и сбоям аппаратуры. - Вопросы радиоэлектроники. Сер. ОТ, 1998,
вып. 1.
58. Федосов Е.А. Реализация сетецентрической технологии ведения боевых действий потребует
создания БРЛС нового поколения. - Фазотрон, 2007, №1,2.
59. Харченко B.C., Мельников В.А. Оценка и обеспечение живучести информационно-вычисли­
тельных и управляющих систем технических комплексов критического использования. Зарубежная радиоэлектроника, 1996, № 1.
60. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993.
61. Ярлыков М.С, Богачев А.С., Миронов М.А. Боевое применение и эффективность авиационных
радиоэлектронных комплексов. - М.: ВВИА им. проф. Н.Е. Жуковского, 1990.
300
ГЛАВА 7
ТЕНДЕНЦИИ РАЗВИТИЯ ИНТЕГРИРОВАННЫХ АВИАЦИОННЫХ
ИНФОРМАЦИОННО-УПРАВЛЯЮЩИХ КОМПЛЕКСОВ
7.1. Направления модернизации и развития
информационно-управляющих комплексов
В настоящее время роль авиации при решении как военных, так и хозяйст­
венных задач непрерывно возрастает. Появление и развитие беспилотных лета­
тельных аппаратов не снижают роли пилотируемых авиационных информаци­
онно-управляющих комплексов как систем, обладающих автономностью, мно­
гофункциональностью и оперативностью принятия решений при изменении
условий функционирования и выполняемых задач.
В ряде стран (США, Израиль, Китай, Швеция, Бразилия) ведутся конструк­
торские разработки авиационных информационно-управляющих комплексов но­
вого поколения. Фактически речь идет о создании многоцелевого летательного
аппарата, решающего многочисленные задачи разведки и управления в интере­
сах всех видов ВС, а также пограничной службы, службы наркоконтроля, кон­
троля чрезвычайных ситуаций (ледовой обстановки, разливов рек, состояния
нефте- и газопроводов, аварий и катастроф) и т. п. Такие комплексы будут ча­
стью общегосударственной информационной системы [1,9].
Особо важную роль информационно-управляющие комплексы играют при
решении оборонных задач. Основной тенденцией развития таких комплексов
является использование новейших революционных технологий, особенно в ра­
диоэлектронике, микроэлектронике, а в последнее время, в нанотехнологиях,
что позволяет значительно повысить ТТХ комплексов и обеспечить возмож­
ность выполнения принципиально новых функциональных задач.
Современные военные доктрины рассматривают использование револю­
ционных технологий в военном деле как обязательное условие обеспечения
противодействия любому возможному противнику на земле, в воздухе, на мо­
ре, в космосе и в информационной среде. При этом информационное превос­
ходство над противником является решающим фактором успеха.
Другой важнейшей причиной развития военных технологий является ост­
рая конкуренция в политической и экономической областях между отдельными
высокоразвитыми в техническом отношении странами и объединениями стран,
что предполагает борьбу за рынки высокотехнологичного оборудования и сбы­
та оружия. Наряду с боевой эффективностью комплексов решающее значение в
борьбе за рынки имеет стоимость жизненного цикла.
Основным направлением развития информационно-управляющих комплек­
сов как ключевого средства борьбы за информационное превосходство над
противником является интегрирование всех информационных датчиков в еди­
ную систему с использованием методов искусственного интеллекта и способов
адаптивного управления. Интегрирование различных датчиков, расположен­
ных как на одной платформе, так и на нескольких различных платформах, в
единый комплекс позволяет значительно расширить возможности по сравне­
нию с отдельными системами и повысить их эффективность (устойчивость) в
условиях противодействия противника [1].
Интеграция - основной путь обеспечения многофункциональности ком­
плексов. Рост числа функций, решаемых задач, сложность и информационная
насыщенность каждой из них дает возможность применения все более изо­
щренных и эффективных оперативно-тактических действий и приемов.
Задача обеспечения многофункциональности решается не только при ин­
теграции разнообразных взаимодополняющих датчиков, в том числе работаю­
щих на различных физических принципах, но и при соответствующей структу­
ре комплекса.
В аппаратно-интегрированных комплексах структура состоит из набора
унифицированных по отношению к функциональным задачам аппаратных и
программных модулей, что позволяет не только оптимально использовать рас­
полагаемые ресурсы (структурные, вычислительные, энергетические) для ре­
шения различных функциональных задач, но и наращивать число задач и ТТХ
путем замены модулей и увеличения их числа.
Необходимость интеграции средств непрерывного контроля (мониторин­
га) воздушной, наземной и надводной обстановки обусловлена также тесным
взаимодействием всех видов и родов ВС при ведении боевых действий как на
оперативно-тактическом, так и на стратегическом уровнях. При этом интегри­
рованные многофункциональные информационно-управляющие системы рас­
сматриваются как часть реализации концепции компьютеризированной среды
боевых действий, в которой информационно-управляющие системы объедине­
ны с боевыми средствами при помощи интеллектуальной сети управления и
системы передачи данных [7, 8].
В настоящее время в качестве авиационных информационно-управляощих комплексов в США используются различные самолеты разведки и
управления: S-3A (надводная обстановка), Е-2, Е-3 (воздушная обстановка) и
3-8 (наземная обстановка), объединенные в систему при помощи многоплатформенного комплекса передачи данных. Главной целью информационно-
управляющих систем являются оценка воздушной, воздушно-космической, на­
земной и надводной обстановки в зоне ответственности, распознавание наме­
рений противника и управление своими силами и средствами.
Существующие авиационные информационно-управляющие комплексы
(Е-2, Е-3, Е-8) уникальны по своим боевым возможностям и оптимизированы
для выполнения определенного ограниченного числа оперативно-тактических
задач. Основным информационным средством этих комплексов являются бор­
товые РЛС, специализированные для решения соответствующих задач. Вслед­
ствие сверхбольшой стоимости создания и всего жизненного цикла они явля­
ются комплексами «долгой жизни». Созданные более 20 лет назад они непре­
рывно подвергались модернизации. Прежде всего модернизируются БРЛС и
бортовые процессоры, как наиболее быстро развивающиеся и, соответственно,
быстро морально устаревающие. Так, например, в комплексах Е-2 с 1960 г.
произошла смена пяти поколений БРЛС (AN/APS-96, 120, 125, 138, 139, 145),
что позволило решать все больше новых задач (например, выполнять обнару­
жение низколетящих целей на фоне земной поверхности) и значительно улуч­
шить ТТХ, особенно в сложной помеховой обстановке.
В то же время основные принципы построения (технический облик)
БРЛС оставались неизменными. Это надфюзеляжная антенна с равномерным
механическим сканированием для обеспечения кругового обзора, диапазоны
волн и основная специализация по функциональному предназначению (комплек­
сы Е-2, Е-3).
Более поздний по времени разработки (1985 г.) комплекс Е-8 использует
вдольфюзеляжную (в подвесном контейнере) антенну типа ФАР с секторным об­
зором. Его модернизация ведется прежде всего для повышения эффективности
обнаружения и распознавания наземных неподвижных и движущихся целей.
Примером планирования модернизации и разработки систем разведки,
оповещения и управления служит программа МС2А (интегрированная, управ­
ления и контроля, авиационная) на многофункциональном самолете Е-10А Бо­
инг 767-400ER.
Комплекс МС2А рассматривается как центральная часть единой интегри­
рованной системы управления боевыми действиями ВМС2. Центральной ча­
стью комплекса является разведывательный самолет с параллельной реализа­
цией функций управления войсками и оружием на основе полученной разведы­
вательной информации.
Система командования (управления и контроля) войсками ВМС2 интег­
рирует все подсистемы (датчики) при помощи центрального процессора, бан­
ка данных, процессора данных, системы связи и линии передачи данных.
Многоплатформенная система связи и передачи данных объединяет авиаци­
онные и наземные командные пункты, ведущие наземные операции, достав­
ляет данные разведывательных комплексов авиационного и космического ба-
зирования и беспилотных летательных аппаратов. При этом самолет Е-10
станет своего рода концентратором, объединяющим потоки разнородной ин­
формации от различных разведывательных систем. Программное обеспече­
ние, предназначенное для анализа и визуализации, позволит оценивать обста­
новку и управлять имеющимися ресурсами и, как следствие, планировать
полномасштабную военную операцию. Для эффективного решения данной
задачи, а также для сокращения времени доведения команд до непосредст­
венных исполнителей предполагается оборудовать самолет системой связи с
интерфейсами сопряжения со всеми существующими и разрабатываемыми
боевыми единицами [9].
Программа Е-10А предполагает поэтапное (эволюционное) развитие ком­
плексов МС2А.
На первом этапе главное внимание уделяется обеспечению обнаружения
воздушно-космических целей, в том числе баллистических ракет, в интересах
противокосмической обороны. Важнейшей задачей считается повышение эф­
фективности селекции движущихся наземных целей. Для этого предполагается
использование РЛС с АФАР двух диапазонов (к = 3 смпХ= \0 см).
В структуре МС2А предполагается поэтапная модернизация подсистем,
(прежде всего БРЛС) и введение новых подсистем (лазерных и инфракрасных).
Планируется также разработка интерфейсов для прямого сопряжения с датчи­
ками разведывательных БЛА и РЛС космического базирования.
На текущий момент ведется подготовка самолета для установки на нем
полноразмерного варианта аппаратуры БРЛС и проверки ее функционирования
в режиме масштабного поиска наземных целей, а также поиска, обнаружения и
сопровождения крылатых ракет.
Несмотря на все преимущества этой перспективной системы, США с 2007 г.
отказалось от ее дальнейшего полномасштабного финансирования из-за боль­
ших расходов. В данный момент продолжается только финансирование работ
по созданию уменьшенного варианта БРЛС для БЛА «Глобал Хок». Результаты
НИОКР про программе МС2А в дальнейшем планируется использовать для по­
следующей модернизации самолетов Е-8.
Рассматривается создание многопозиционных БРЛС и многоплатформен­
ных датчиков и систем передачи данных.
Кроме многофункциональных авиационных комплексов, комплексов кос­
мического базирования и беспилотных летательных аппаратов, возможно при­
менение аэростатных комплексов дозора и разведки, а также комплексов, уста­
новленных на автономных стратосферных дирижаблях [4].
При построении системы разведки, оповещения и управления необходимо
выполнить ряд противоречивых требований [1].
1. Элементы системы должны быть мобильными и способными к развер­
тыванию на угрожаемых направлениях в кратчайшие сроки, в том числе в рай­
онах со слабо развитой инфраструктурой.
2. Система должна обеспечивать длительную (в течение нескольких меся­
цев) непрерывную работу в дежурном режиме. При работе в этом режиме за­
траты на эксплуатацию должны быть минимальными.
3. Система должна многократно увеличивать уровень своей эффективно­
сти при переходе в боевой режим.
4. Должен обеспечиваться высокий уровень боевой устойчивости системы.
Основным источником информации в многофункциональных комплексах
разведки, оповещения и управления является БРЛС, модернизация и разработ­
ка которой требует применения передовых революционных технологий [2].
Анализ возможностей и эффективности основных направлений модерни­
зации существующих и разработка новых БРЛС требуют учета большого числа
тактических и технических характеристик как БРЛС в целом, так и отдельных
узлов, прежде всего антенных систем [3].
В качестве показателей эффективности различных вариантов модерни­
зации и разработки БРЛС обычно используют возможность решения новых
тактических задач, повышение ТТХ, а также снижение стоимости жизненного
цикла и повышение экспортного потенциала.
Среди новых функций и задач БРЛС особо важными являются сле­
дующие.
Многофункциональность, т. е. выполнение одновременно либо с заданной
частотой обращения, задач разведки, оповещения и управления. При этом ре­
шаются задачи наблюдения (обнаружения, определения местоположения, рас­
познавания и контроля функционального состояния) в заданном районе одно­
временно воздушных, наземных и надводных целей. Многофункциональность
комплекса предполагает также решение задач РЭБ, навигации, связи и госо­
познавания путем реконфигурации аппаратурной части и программного обес­
печения.
Обеспечение наблюдения с высокой эффективностью малоразмерных
целей и целей с искусственно сниженной заметностъю (технология СТЭЛС).
Такими целями могут быть не только воздушные (В-2), но и морские, и на­
земные цели.
Наблюдение воздушно-космических целей на больших дальностях и высо­
тах, скоростных и сверхманевренных летательных аппаратов.
Обнаружение замаскированных наземных целей (искусственные маскиро­
вочные покрытия, полог леса, лесопосадки вдоль дорог, слой почвы и расти­
тельности). Измерение микрорельефа подстилающей поверхности в районе
расположения целей.
Распознавание класса и типа заданных воздушных, морских и наземных
целей, в том числе групповых целей, вертолетов, а также ложных целей (надув­
ные макеты целей, ловушки, уголковые отражатели и т. п.), определение функ­
ционального состояния оперативных и стратегических целей (маневр, пуск
ракет). Различение низколетящих целей и движущихся наземных целей. Распо­
знавание «свой-чужой».
Обнаружение, определение координат и распознавание радиоизлучающих
объектов, целеуказание средствами РЭП.
Решение комплексных задач:
1) целеуказание и коррекция зенитных управляемых ракет при наведении
на цели, летящие ниже радиогоризонта наземной РЛС;
2) управление беспилотными ЛА;
3) контроль выполнения боевой задачи, оценка боевых потерь;
4) обнаружение мест катастроф и аварий транспортных средств;
5) контроль воздушной, наземной и морской обстановки в районах неох­
раняемых сухопутных и морских границ (наркотрафик, контрабанда, браконьзрство, нелегалы);
6) поддержка антитеррористической деятельности;
7) контроль техногенных объектов;
8) контроль последствий экологических катастроф;
9) обеспечение противоракетной обороны комплекса.
При этом также выполняются все функциональные задачи существующих
информационно-управляющих комплексов.
Повышение тактико-технических характеристик при модернизации
комплекса направлено на достижение следующих результатов.
1. Увеличение дальности обнаружения низколетящих наземных и надвод­
ных целей вплоть до радиогоризонта (400 км при высоте полета носителя РЛС
9 км), а также загоризонтных целей до дальности прямой видимости с высокой
вероятностью правильного обнаружения ( Р п о - 0,9...0,95). При высотах полета
носителя РЛС и воздушной цели, равных 9 км, дальность прямой видимости
доставляет 800 км.
Увеличение дальности может быть достигнуто за счет использования
АФАР с большой площадью и средней мощностью, увеличения времени когезентного накопления сигнала как в круговом обзоре (оценка воздушной обста­
новки), так и в узких (приоритетных) секторах. Переход к длинноволновым
-.-, Р-диапазонам уменьшает потери энергии в дожде и в тракте РЛС и уровень
отражений от подстилающей поверхности, а также увеличивает ЭПР целей,
особенно малоразмерных и малозаметных. Дополнительное повышение даль­
ности обнаружения может быть достигнуто при использовании алгоритмов
(слежения до обнаружения» и последовательного обнаружения.
2. Формирование программируемого обзора по азимуту (круговой, сек­
торный, многолучевой, телескопический) и однострочного со сканированием
по углу места для обеспечения приоритетности направления обзора, а также
регулирование времени обращения к цели. Использование БРЛС с антенной
типа ΑΦ АР позволяет решать эти задачи.
3. Увеличение зоны ответственности во всем диапазоне дальностей обна­
ружения целей (без слепых зон) и круговом обзоре по азимуту (без затенения
элементами конструкции ЛА). Решение этой задачи БРЛС возможно в режиме
НЧП L-, Р-диапазоны и использование длинной вдольфюзеляжной АФАР на
ЛА с верхним относительно фюзеляжа расположением двигателей, крыла и
хвостового оперения, например, А-40, А-42.
4. Оптимизацию (программирование) времени обзора и когерентного на­
копления сигналов в зависимости от решаемой задачи (дальнее обнаружение в
секторе, круговой обзор, сопровождение целей, в том числе сверхманевренных,
в заданных секторах, синтезирование апертуры по воздушным и наземным це­
лям). Использование АФАР, высокопроизводительных процессов и алгоритмов
длительного наблюдения (синтезирования апертуры с автофокусировкой) мо­
жет решить эти задачи.
5. Повышение разрешающей способности и точности измерения коорди­
нат для обеспечения распознавания целей по их радиолокационному изобра­
жению, разрешения целей в группе, обнаружения малоразмерных наземных
целей и точного целеуказания путем привязки РЛИ цели к цифровой карте
местности.
Повышение разрешающей способности и точности по дальности обеспе­
чивается использованием широкополосного зондирующего сигнала, а по ази­
муту - применением антенны большого размера и синтезирования апертуры
антенны.
Повышение точности измерения высоты полета цели и микрорельефа мест­
ности возможно в бистатическом режиме (интерферометрический режим РСА).
Повышение разрешения и точности по радиальной скорости цели обеспе­
чивается путем увеличения времени когерентного накопления сигнала, воз­
можно, с автофокусировкой. Неоднозначность измерения скорости в режиме
НЧП устраняется перестройкой несущей частоты в 2-3 соседних интервалах
когерентного накопления сигналов, а также слежением за изменением дально­
сти цели от обзора к обзору.
6. Увеличение максимальной радиальной скорости цели при решении за­
дач обнаружения (селекции) и однозначного измерения скорости цели. Исполь­
зование Р-диапазона волн и слежение по траектории при высоком разрешении
по дальности и скорости решают эту задачу.
7. Уменьшение минимальной радиальной скорости цели при решении за­
дач селекции и распознавания низколетящих и движущихся наземных целей.
Использование пространственно-временной обработки при наличии АФАР, а
также измерение вектора скорости цели (радиальной и тангенциальной состав­
ляющих) решают эти задачи.
8. Обеспечение сопровождения всех обнаруженных целей в зоне ответст­
венности комплекса. При программируемом обзоре ограничение числа сопро-
вождаемых целей определяется в основном производительностью процессора
обработки данных.
9. Повышение скрытности и помехоустойчивости комплекса. Скрытность
излучения и помехоустойчивость БРЛС может быть повышена за счет испольювания многочастотных сигналов с большим коэффициентом сжатия и боль­
шим временем когерентного накопления, а также использования двух-многопозиционной работы. БРЛС с АФАР позволяет формировать нули диаграммы
направленности на источники помех, а также осуществлять РЭП систем РТР
противника, что препятствует формированию эффективных помех.
Важнейшим направлением развития комплексов разведки, оповещения и
управления являются повышение боевой эффективности и снижение стои­
мости жизненного цикла [5].
Боевую эффективность комплекса, наряду с обеспечением многофунк­
циональности и повышением ТТХ, определяют следующие факторы.
1. Устойчивость к боевым повреждениям и отказам. Устойчивость обеспешвается за счет многократного резервирования благодаря модульной конструкции аппаратуры и программного обеспечения, использования интегрированных модулей и возможностей реконфигурации структуры комплекса при
огказах и боевых повреждениях отдельных модулей для обеспечения заданных
режимов функционирования, возможно, с меньшей эффективностью.
2. Использование ЛА и аэродромов среднего класса, а также унифицированных ЛА сухопутного и морского базирования (например, А-40, А-42).
3. Внешняя скрытность ЛА комплекса, что достигается путем использования конформных антенн и ЛА без специальных надстроек.
4. Большое время патрулирования и возможность дозаправки в полете.
Использование группы комплексов.
5. Автоматизация управления комплексом и боевого управления, что сни­
кает необходимое число операторов на борту.
6. Информационная безопасность и технологическая независимость, что
обеспечивается при использовании имеющихся в наличии компонентов отечетвенной элементной базы и программного обеспечения.
7. Возможность непрерывной, в течение всего жизненного цикла, модермзации комплекса, что обеспечивает использование открытой модульной аритектуры аппаратуры и процессоров.
Уникальность и исключительно высокая стоимость жизненного цикла су­
ществующих комплексов резко ограничивают возможности их массового применения и снижают рыночную привлекательность.
Снижение стоимости жизненного цикла является одним из основных наравлений развития комплекса, что повышает рыночную привлекательность и
онкурентоспособность.
Снижение стоимости разработки и производства достигается за счет
спользования интегрированных аппаратурных и вычислительных модулей.
Применение конформных АФАР на серийных (не специализированных) ЛА
среднего класса также резко снижает стоимость разработки комплекса.
Снижение стоимости эксплуатации достигается за счет повышения на­
дежности модулей и ремонтопригодности комплекса. Предполагается эксплуа­
тация комплекса «по состоянию», при которой используется развитая автома­
тическая полетная и послеполетная диагностика вплоть до конкретного моду­
ля. Восстановление работоспособности комплекса достигается за счет простой
замены модуля без дополнительных проверок и регулировок, что снижает тре­
бования к объему регламентных и ремонтных работ, к числу и квалификации
обслуживающего персонала.
Стоимость модернизации значительно снижается при ее выполнении пу­
тем замены на новые, перспективные унифицированные и специализирован­
ные модули.
Можно считать, что основные направления модернизации без изменения
технического облика комплекса к настоящему времени в значительной степе­
ни исчерпаны. В то же время растут требования как по решению новых так­
тических задач, так и по значительному повышению ТТХ комплекса. Возни­
кает необходимость коренного изменения облика комплекса, прежде всего
БРЛС, типа антенной системы и диапазона рабочих частот. Фактически речь
идет о создании нового комплекса как по принципам построения, так и по
выполняемым задачам.
В настоящее время ведутся интенсивные исследования по созданию ново­
го поколения авиационных информационно-управляющих систем [6]. Можно
отметить систему раннего предупреждения и управления MESA на борту само­
лета БОИНГ-707. Антенна типа ФАР, выполненная в виде гребня над фюзеля­
жем, обеспечивает программируемый обзор от кругового до узкого секторного
со временем сканирования от 3 до 40 с. Комплекс обеспечивает контроль воз­
душного (самолеты, крылатые ракеты, вертолеты) и надводного (патрульные
катера, фрегаты) пространства с целью поддержки с воздуха тактических на­
земных и морских сил. Решаются задачи ПВО, раннего предупреждения и за­
воевания превосходства в воздухе. Возможно выполнение гражданских задач.
БРЛС MESA объединена с системой госопознавания. Главное достоинство
комплекса - значительное снижение затрат на весь жизненный цикл, обеспече­
ние коммерческой привлекательности.
На примере БРЛС MESA и других разработок прослеживаются основные
направления разработки технического облика БРЛС:
использование конформных антенн типа ФАР большой площади с про­
граммируемым обзором;
переход на активные ФАР, увеличение средних мощностей;
использование длинноволновых L-, Р-диапазонов с модулями эффектив­
ной элементной базы;
открытая модульная архитектура радиоэлектронных и вычислительных
систем, высокая надежность, устойчивость к отказам;
резкое снижение стоимости жизненного цикла всего комплекса.
Многофункциональность комплекса обеспечивается интеграцией сред­
ств, работающих на различных физических принципах. Совместно с БРЛС сис­
темы радио и радиотехнической разведки решают задачи скрытного обнаруже­
ния, оценки местоположения, распознавания и определения функционального
состояния радиоизлучающих наземных, воздушных и надводных объектов. Оп­
тико-электронные системы обеспечивают обнаружение и сопровождение вы­
сотных воздушных и воздушно-космических целей на больших дальностях с
высокой помехозащищенностью.
Системы госопознавания обеспечивают распознавание своих объектов и
определение их параметров.
Одновременное наблюдение при помощи РЛС как воздушных, так и на­
земных (морских) целей обеспечивается аппаратурной и программной инте­
грацией путем создания модульной распределенной архитектуры - архитекту­
ры АФАР, вычислительных средств и программного обеспечения.
Наличие многофункциональности обеспечивает интеллектуализацию ком­
плекса (возможность эффективно функционировать в непредусмотренных ранее условиях) путем создания и непрерывного обновления за счет опыта пре­
дыдущей работы банков данных и знаний.
Выполняется важнейшее требование к многофункциональному авиационному комплексу разведки, оповещения и управления - снижение (в несколько
раз) стоимости всего жизненного цикла (стоимости приобретения, эксплуатации
и модернизации) по сравнению с существующими комплексами (Е-3, Е-8) и, как
следствие, значительное повышение рыночной привлекательности.
7.2. Тактико-технические характеристики бортовых
радиолокационных систем перспективных комплексов
Радиолокационная система многофункционального комплекса должна
обеспечивать решение большого числа разнородных задач, часть из которых
является особо сложной и новой, что предъявляет ряд высоких требований к
аппаратурной части и программному обеспечению БРЛС перспективных комплексов [3].
В режиме контроля воздушного (воздушно-космического) простран­
ства новыми задачами являются следующие.
1. Обнаружение: 1)ЛА, выполненных по технологии СТЭЛС вплоть до
дальности прямой видимости; 2) воздушно-космических объектов на больших
дальностях (до 1000.. .1500 км), летящих на больших высотах (до 100... 150 км)
со скоростями до 5 км/с.
На рис. 7.1 представлены графики зависимости дальности прямой видимо­
сти Дпв от высот полета комплекса Нк и цели Нц.
Рис. 7.1
Решение этой задачи требует значительного повышения (в сто и более раз)
энергетического потенциала РЛС. При заданном секторе обзора необходимо
увеличивать среднюю мощность излучения и площадь антенны. Дополнитель­
ный выигрыш дает применение сверхдлительного когерентного накопления
сигнала (в течение всего времени облучения с использованием методов авто­
фокусировки) и последовательного обнаружения траекторного сигнала целей.
Переход к дециметровому диапазону волн значительно увеличивает ЭПР
малоразмерных целей и целей, выполненных по технологии СТЭЛС, и позволяет
использовать антенны большей площади и АФАР большой средней мощности.
2. Всеракурсное обнаружение низколетящих малозаметных целей на
больших дальностях (до радиогоризонта 400...500 км) (рис. 7.1): 1) самолетов
СТЭЛС; 2) крылатых ракет; 3) беспилотных ЛА; 4) вертолетов, в том числе за­
висших; 5) сверхманевренных ЛА.
Решение этой задачи требует выделения цели на фоне мощных отражении
от подстилающей поверхности и измерения вектора скорости цели (радиальной
и тангенциальной составляющих) путем пространственно-временной обработ­
ки с длительным временем когерентного накопления, что при заданном време­
ни обзора сектора и требуемой высокой точности измерения дальности ограни­
чивает применение режимов ВЧП и СЧП. Рассматривается переход в децимет-
ровый (L, Р) диапазон, режим НЧП с высоким разрешением по дальности и об­
ратным синтезированием апертуры. При этом также уменьшается уровень фона
и увеличивается ЭПР целей.
3. Распознавание воздушных целей: 1) групповая цель с раздельным на­
блюдением каждой цели в группе; 2) класс и тип цели (самолеты с различными
типами двигателей, вертолеты, крылатые ракеты, ложные цели); 3) боевой по­
рядок группы; 4) функциональное состояние цели (маневр, пуск ракет, веду­
щий-ведомый); 5) различение низколетящих целей и движущихся наземных
целей; 6) цели ловушки; 7) ЛА «свой-чужой»; 8) контроль результатов управ­
ления и оценка боевых потерь.
Алфавит распознаваемых классов воздушных целей содержит: самолеты
стратегической авиации, самолеты тактической авиации, самолеты специаль­
ной авиации (АВАКС, Джистарс, РЭБ), самолеты военно-транспортной авиа­
ции, вертолеты, беспилотные ЛА, крылатые ракеты, воздушно-космические
объекты. Дальность распознавания должна быть не менее 70 % от дальности
обнаружения целей.
Распознавание воздушных целей должно обеспечиваться при наблюдении
в свободном пространстве и на фоне земной (водной) поверхности.
Решение этих задач требует анализа большого числа распознавательных
признаков сигналов целей, прежде всего спектральных, фазовых и поляризаци­
онных, а также формирования детальных портретов целей (радиовидения).
4. Одновременное раздельное обнаружение и сопровождение большого
чела (более 1000) воздушных целей, в том числе в группе, в зоне ответствен­
ности без «слепых зон», что требует обеспечения высокой разрешающей спо­
собности по дальности (50...100 м), углам (0,5°... 1°) и скорости (1...2 м/с), а
также высокой частоты обращения к цели (1...2 Гц), особенно при сопровождении сверхманевренных ЛА.
5. Высокая точность измерения азимута 0,1° и высоты полета 1 км цели,
что требует использования антенн с большим отношением размера к длине
волны и специальных алгоритмов обработки сигналов.
В режиме контроля наземного и надводного пространства наиболее
сложными и частично новыми задачами являются следующие.
1. Контроль функционального состояния портов, аэродромов, ракетных баз
и войсковых соединений противника (подготовка к полетам, пуск ракет, передис­
локация и т. п.) на максимальных удалениях (до радиогоризонта), что требует ре­
шения целого комплекса радиолокационных задач: обнаружения всех классов це­
лей на открытой местности; селекции малоскоростных движущихся целей с изме­
рением радиальной и тангенциальной составляющих скоростей (VMHH = 1.. .2 м/с);
раздельного наблюдения целей в группе (разрешение 10...20 м); распознавания
класса и типа цели (разрешение 0,5...1,0 м); высокой точности определения ме­
стоположения целей (целеуказание с привязкой к цифровой карте местности).
В табл. 7.1 даны оценочные значения требуемой разрешающей способно­
сти (метры) для обнаружения и распознавания структуры (типа) целей по их
радиолокационному изображению.
Таблица 7.1
Цели
Обнаружение
Распознавание
структуры (типа)
Группировка войск
Ж/д узел
Аэродром
10
5,0
30
5,0
3,0
Самолеты на стоянке
5,0
ЗРК
10
1,0
3,0
Танки в степи
Морской порт
8
1,0
30
Морской катер
30
10
4,0
10
2. Обнаружение малоразмерных целей (танки, БМП, артиллерия, ЗРК и
ОТР и т. п.), замаскированных за лесопосадками вдоль дорог, в лесных масси­
вах, в условиях искусственной маскировки, на больших дальностях вплоть до
радиогоризонта.
Принципиально новой задачей является обнаружение целей в лесу, закры­
тых маскировочными укрытиями, что требует в большинстве случаев перехода
в длинноволновый диапазон работы РЛС (λ = 23...70 см) и использования ре­
жима синтезирования апертуры в телескопическом обзоре с большим угловым
размером апертуры. Требуемое разрешение на местности для обнаружения та­
ких целей (10... 50 м).
Особо сложная задача - распознавание класса замаскированных целей, их
функционального состояния и различения ложных целей (надувных макетов),
что требует привлечения многих распознавательных признаков (радиовидения,
вторичной модуляции, обратного синтезирования, многочастотных и поляри­
зационных портретов) и высокого разрешения (1.. .5 м).
3. Формирование с высокой детальностью трехмерного радиолокацион­
ного изображения местности для обнаружения вновь построенных мостов,
переправ, ВПП, капониров, карьеров, дотов и т. п., что требует наблюдения в
широкой полосе местности, обычно 10 3 ... 104 элементов разрешения с исполь­
зованием интерферометрического режима измерения микрорельефа местно­
сти с точностью 1...2 м. Для исключения влияния маскировки рельефа расти­
тельностью требуется использование длинноволнового диапазона в бистатическом режиме.
4. Обнаружение малоразмерных, малозаметных надводных целей (катера,
перископы ПЛ, корабли СТЭЛС и т. п.), а также их распознавание до класса
требуют обеспечения высокого разрешения (1,0...5,0 м) и интерферометрического режима измерения микрорельефа водной поверхности.
5. Обнаружение следов на водной поверхности (спутных следов кораблей,
нефтяных и биозагрязнений, следов аварий и катастроф и т. п.). Решение такой
задачи требует специального режима РСА-формирования скоростного портре­
та водной поверхности при высоком разрешении (1...5 м) и высокой точности
измерения азимута (угловые минуты).
6. Оценка результатов боевой деятельности, что требует формирования
высокодетального радиолокационного изображения района боевых действий
(разрешение 1,0...3,0 м).
7. Темпы обновления информации (частота обращения к цели) определя­
ются возможной скоростью изменения тактической обстановки. Так, у РЛ сис­
темы «Джистарс» темп обновления при картографировании 30 мин, при на­
блюдении неподвижных объектов - 10 мин, движущихся объектов - 30 с. Вы­
сокоскоростные цели требуют более частого обращения, но при измерении
вектора скорости цели эту частоту можно уменьшить.
8. Размеры и конфигурация зоны ответственности (зоны обзора РЛС)
определяются в первую очередь решаемой боевой задачей, возможными дейст­
виями и расположением сил и средств противника, а также ТВД.
Типичной оперативно-стратегической задачей является контроль сопре­
дельной территории противника: районов дислокации группировок войск,
функционального состояния аэродромов, ракетных баз, портов, кораблей воз­
душного и воздушно-космического пространства.
Зона просмотра воздушного пространства в этом случае простирается
вглубь сопредельной территории до максимальной дальности действия РЛС на
больших высотах и до радиогоризонта на малых. Траектория полета АК прохо­
дит вдоль границы на расстоянии от нее, обеспечивающем безопасность ЛА
(50... 100 км). Сектор сканирования по азимуту определяет ширину зоны ответ­
ственности +60°, в которой осуществляются обнаружение, распознавание и
слежение за всеми воздушными целями. На противоположной стороне (над
своей территорией) РЛС при необходимости обеспечивает слежение за своими
ЛА и ЛА противника, если они перелетели границу.
При проведении противником воздушной операции, а также пусках кры­
латых ракет с большой дальности возможно появление групп ЛА с любых на­
правлений, что требует кругового обзора либо изменения положения сектора
обзора путем управления траекторией полета АК.
При наблюдении наземной (надводной) обстановки зона обзора перекры­
вает отдельные районы дислокации противника. Размеры зон и вид обзора
(секторный, полосовой, телескопический) определяются размерами целей (аэ­
родромы, ракетные базы, порты и т. п.) и требуемой детальностью наблюдения
для обеспечения контроля их функционального состояния.
При решении оперативно-тактических задач требуемая зона обзора пере­
крывает район боевых действий по глубине и ширине. Удаление АК от зоны об­
зора определяется безопасностью комплекса 100 км. Обеспечение наблюдения
требуемого района достигается при секторном обзоре РЛС. Кроме того, в инте­
ресах поддержи ПВО прилегающих к зоне боевых действий районов обзор воз­
душного пространства ведется в более широком секторе, вплоть до кругового.
Для повышения эффективности решения боевых задач требуется оптими­
зация размеров зон обзора, вида обзора и времени обзора (программируемый
обзор). В настоящее время в РЛС дозора и наведения используется надфюзеляжная антенна («гриб» на подставке), которая обеспечивает равномерный
круговой обзор воздушного пространства по азимуту и сканирование (либо
многолучевая ДН) по углу места. Темп слежения (скорость вращения) состав­
ляет 10 с, что обеспечивает устойчивое слежение за целями, летящими со ско­
ростями не более 1000 м/с.
К недостаткам такой антенны РЛС и метода обзора относятся:
1) невозможность наращивания усилий в определенном секторе наблюде­
ния воздушного пространства (секторный обзор с изменяемой скоростью ска­
нирования);
2) невозможность детального наблюдения земной (надводной) обстановки
(режим синтезирования апертуры);
3) ограничение максимальной площади антенны размерами «гриба», что
не позволяет наращивать энергетический потенциал РЛС;
4) недостаточная боевая устойчивость АК (нет резервирования, большая
ЭПР, невозможность противоракетного маневра, внешние демаскирующие
признаки);
5) большая масса «гриба», что требует использования ЛА тяжелого класса;
6) большая стоимость жизненного цикла АК.
Для решения большинства задач комплекса требуется программируемый
секторный обзор зоны ответственности. В настоящее время рассматриваются
два возможных направления решения этой задачи.
В первом направлении используется такая же форма антенны: «гриб» на
подставке. Внутри неподвижного обтекателя располагается антенна типа ФАР
(АФАР), имеющая форму равностороннего треугольника. Такая антенна позво­
ляет обеспечивать любой вид обзора: круговой, секторный программируемый,
многолучевой и т. п. с изменяемой скоростью обзора. Однако по-прежнему ос­
таются ограниченная размером «гриба» площадь антенны и большая масса ан­
тенны. При этом резко возрастает ее стоимость.
Второе направление устранения недостатков существующего метода об­
зора - использование конформных (невыступающих) антенн типа АФАР боль­
шой площади, ограниченной только размерами фюзеляжа. Так, боковые вдольфюзеляжные АФАР L-, Р-диапазонов могут иметь длину десятки метров и вы-
соту несколько метров. Сектор обзора может достигать 120...140° с каждой
стороны ЛА, а круговой обзор с меньшей эффективностью в переднем и заднем
секторах - ±20°.
Наряду с оптимизацией режимов обзора такая антенна благодаря большой
площади и меньшей зоне ответственности обеспечивает значительный рост
ТТХ АК. При необходимости круговой обзор в режиме дежурства может быть
обеспечен путем управления траекторией полета АК. Однако кардинальным
решением является использование нескольких (двух) однотипных комплексов.
Используя только конформные боковые АФАР максимально большого разме­
ра, два АК обеспечивают перекрытие любой зоны ответственности, вплоть до
круговой, с возможностью наращивания усилий в требуемом секторе и опти­
мизацией (адаптацией) всех режимов работы РЛС.
Использование двух АК позволяет работать в бистатическом режиме, а
также снимает ограничения по ЭМС при ведении РТР. Резко возрастает боевая
устойчивость, так как обеспечивается взаимозаменяемость (дублирование) АК
при боевых повреждениях, отказах и РЭП.
При использовании БРЛС с вдольфюзеляжной АФАР L-, Р-диапазонов
значительно снижается стоимость и растет рыночная привлекательность ком­
плекса.
Обеспечение скрытности и помехозащищенности работы БРЛС явля­
ется одним из основных требований, предъявляемых к комплексу. Для сниже­
ния вероятности обнаружения излучения БРЛС станциями РТР противника и
создания эффективных помех комплексу в БРЛС необходимо использовать:
1) сигналы большой длительности с внутриимпульсной модуляцией при
коэффициенте сжатия 100 и более;
2) длительное когерентное накопление пачки сигналов (секунды и десятки
секунд);
3) многочастотный режим излучения и приема;
4) максимальную неопределенность для противника характеристик РЛС в
процессе работы (несущей частоты, начальной фазы, вида модуляции, методов
обзора и т. п.) и их адаптивное изменение в зависимости от помехоцелевой об­
становки;
5) минимизацию излучения в направлении станции РТР;
6) двухпозиционный (полуактивный) режима работы.
При работе РЛС в различных диапазонах волн и при широкой полосе час­
тот возможно появление помех как преднамеренных (РЭП), так и помех, обу­
словленных излучениями различных источников (связных, навигационных, те­
левизионных и т. п.). Обеспечение помехоустойчивости к такого рода помехам
требует оптимальной пространственно-временной обработки (режекции помех
по направлению и частоте) и адаптивной перестройки частоты РЛС в свобод­
ные от помех частотные окна.
Использование широкополосного излучения РЛС ограничивает возмож­
ность создания заградительной помехи противником не только по энергетиче­
ским критериям, но и по условиям ЭМС своих радиоэлектронных систем.
7.3. Бортовая радиолокационная система
с цифровой активной фазированной антенной
решеткой перспективного комплекса
Наилучшим образом поставленные задачи по обеспечению требуемых
ТТХ БРЛС могут быть решены при помощи АФАР, размещаемой во вращаю­
щемся обтекателе и построенной с использованием современных достижений в
области СВЧ и цифровых технологий [2, 3].
Достижения последних лет в области малошумящих СВЧ-усилителей со
скрещенными полями (СВЧ-усилительных приборов типа «М»), а также в об­
ласти монокристаллических быстродействующих АЦП и ЦАП позволяют соз­
давать АФАР в сантиметровом диапазоне волн, базирующиеся на «интеллекту­
альных» приемопередающих антенных модулях с высоким КПД.
Технология «интеллектуальной антенны» дает возможность строить циф­
ровую АФАР без применения аналоговых фазовращателей и без сложных и
громоздких диаграммообразующих устройств.
Принцип построения приемопередающей части «интеллектуального» мо­
дуля АФАР поясняет рис. 7.2.
Рис. 7.2.
Замена аналоговой диаграммообразующей схемы с управлением аналого­
выми фазовращателями на высокоточный цифровой диаграммообразующий
процессор позволяет подключить малошумящие усилители и усилители мощ­
ности непосредственно к дуплексам излучающих элементов решетки с мини­
мальными потерями энергии сигнала. Управление распределением поля в раскрыве антенной решетки осуществляется цифровыми процессорами, форми­
рующими диаграмму направленности на передачу и на прием в цифровом виде.
Отметим, что диаграммообразующий процессор передачи позволяет пол­
ностью сформировать зондирующий сигнал, т.е. одновременно с формирова­
нием передающей диаграммы направленности антенны выполняет функции
возбудителя передатчика. В частности, при движущемся носителе импульснодопплеровской РЛС одной из функций возбудителя является выработка ком­
пенсирующего сдвига частоты сигнала - так называемая «компенсация скоро­
сти носителя».
Из аналоговых устройств сосредоточенного приемопередатчика практиче­
ски остается только когерентный синтезатор сигналов.
Цифровая АФАР обладает возможностью оперировать в реальном вре­
мени амплитудно-фазовым распределением в раскрыве приемной и передаю­
щей ФАР.
На рис. 7.3 показана структурная схема встраивания элементов гибридной
АФАР (ГАФАР) в антенное устройство во вращающемся обтекателе.
Блоки управления и электропитания ГАФАР (в том числе анодный моду­
лятор для усилителей СВЧ-мощности) размещаются в объеме вращающегося
обтекателя.
Вариант размещения мощного анодного модулятора в фюзеляже крайне
нежелателен по двум причинам:
1) возникает необходимость передачи мощных высоковольтных импуль­
сов с короткими фронтами через вращающееся контактное устройство и дос­
таточно протяженную кабельную линию, что является сложной технической
задачей;
2) большой уровень излучаемых электромагнитных полей, что отрицатель­
но скажется на внутрифюзеляжной обстановке в части электромагнитной со­
вместимости различных компонентов радиотехнического и навигационного
комплексов самолета.
В качестве выходных СВЧ-усилителей приемопередающих модулей
(ППМ) ГАФАР возможно использовать электровакуумные приборы (ЭВП) с
так называемыми «скрещенными полями» (в которых электрическое и магнит­
ные поля расположены под прямым углом), часто называемыми электроваккумными приборами (ЭВП) типа «М». К СВЧ-приборам типа «М» относят­
ся амплитроны, дематроны, биматроны («ЛБВ-М»), магнетроны и ряд других
приборов.
Рис. 7.3.
Важное достижение разработчиков ЭВП типа «М» за последние годы снижение шума и побочных эффектов, наблюдаемых в приборах этого типа и
являвшихся до последнего времени серьезным препятствием к применению в
высококогерентных РЛС. Сегодня можно считать реальным снижение инте­
грального шума до уровня минус 80...90 дБ, что является приемлемым для РЛС
рассматриваемого типа.
В ППМ сосредоточено выполнение всех необходимых функций для фор­
мирования ДНА ГАФАР при помощи диаграммообразующих процессоров:
1) выработка зондирующего сигнала по цифровому «портрету» при помо­
щи когерентного СВЧ-гетеродина передачи и быстродействующего ЦАП;
2) усиление зондирующего сигнала;
3) дуплексная развязка «передача/прием» и усиление принимаемых сигна­
лов с малым шум/фактором;
4) преобразование принимаемых сигналов к промежуточной частоте при
помощи когерентного СВЧ-гетеродина приема и преобразование в цифровую
форму при помощи быстродействующего АЦП;
5) обмен цифровой информацией с диаграммообразующими процессорами;
6) выработка сигналов встроенных датчиков для контроля работоспособ­
ности.
Диаграммообразующие процессоры осуществляют:
1) выработку цифровых «портретов» зондирующих сигналов с необхо­
димым фазовым сдвигом для различных ППМ - для формирования ДНА на
передачу и обмен с ЦАП, находящимися в ППМ; для снижения плотности
обменной цифровой информации между центральным процессором и ППМ
целесообразным представляется вариант рассредоточенного передающего
процессора, когда в каждом ППМ размещается индивидуальный процессор,
вырабатывающий свой цифровой сигнал в реальном времени, непосредствен­
но воздействующий на ЦАП;
2) прием оцифрованных сигналов из ППМ и формирование необходимого
числа приемных ДНА; по причинам, указанным для передающего процессора, в
каждом из ППМ целесообразно размещение индивидуального приемного про­
цессора, осуществляющего предварительную обработку принимаемых сигналов
с преобразованием их к двум квадратурным составляющим и согласованной с
длительностью импульса фильтрацией и прореживанием временных выборок;
3) обмен радиолокационной информацией с устройством обработки сиг­
налов РЛС;
4) включение тестового режима ГАФАР и контроль работоспособности с
точностью до ППМ.
РЛС осуществляет работу в трех основных режимах:
1) режим квазинепрерывного излучения (КНИ) - для обнаружения и со­
провождения движущихся воздушных целей на фоне отражений от земной по­
верхности;
2) режим излучения с низкой частотой повторения линейно частотномодулированных (ЛЧМ) импульсов высокой энергии (загоризонтный режим) для всеракурсного обнаружения и сопровождения воздушных целей, находя­
щихся выше линии радиогоризонта и на расстояниях, превышающих дальность
радиогоризонта;
3) режим излучения с низкой частотой повторения импульсов с расширен­
ной полосой линейной частотной модуляции - для обнаружения и сопровож­
дения надводных кораблей и наземных целей с высоким разрешением по даль­
ности.
В режиме квазинепрерывного излучения круговой обзор в заданной угломестной зоне осуществляется построчно. При этом ГАФАР формирует в угломестной плоскости один луч на передачу и два луча на прием, как показано
на рис. 7.4. Каждая угломестная строка стабилизирована относительно гори­
зонтальной плоскости с учетом для каждого азимутального положения ДНА
крена и тангажа самолета-носителя.
Рис. 7.4.
Электрическое управление в угломестной плоскости осуществляется дис­
кретно-фазовым методом одновременно по передающим и приемным лучам
ГАФАР. Шаг дискретного угломестного сканирования составляет небольшую
долю от ширины луча. Переключение угла места (в том числе для стабилиза­
ции зоны обзора при эволюциях самолета-носителя) происходит в моменты
смены частоты повторения КНИ, т.е. во время излучения и приема когерентной
пачки на одной частоте повторения положение лучей ГАФАР остается неиз­
менным.
Обработка принимаемых эхо-сигналов осуществляется цифровым спосо­
бом в двух идентичных каналах «пеленгационной пары». После когерентной
обработки, выполняющей селекцию сигналов движущихся целей на фоне мощ­
ных помех от подстилающей поверхности и когерентное накопление, осущест­
вляются сложение и вычитание амплитуд сигналов в каждом из элементов раз­
решения «скорость - неоднозначная дальность».
По суммарному сигналу вырабатываются адаптирующиеся пороги и осу­
ществляется обнаружение сигнала цели.
По разностному сигналу в элементе разрешения, где обнаружен сигнал,
проводится расчет угломестного отклонения линии визирования обнаруженной
цели от равносигнального направления по формуле
•
где ΔΘ - отклонение от равносигнального направления; А] и А2 - амплитуды
сигнала с верхнего и нижнего лучей пеленгационной пары; к - масштабный ко­
эффициент.
Формула является дискриминационной характеристикой двух сдвинутых
по углу амплитудных характеристик направленности относительно равносиг­
нального направления. Точность измерения угла с использованием пеленгаци­
онной характеристики вблизи ее нуля приближается к потенциально достижи­
мым значениям.
Электронное управление угломестным положением луча позволяет в про­
цессе циклического обзора осуществить подрежим прицеливания по сопрово­
ждаемым целям, когда в азимутальном стробе проводится быстрая установка
равносигнального направления пеленгационной пары ДНА в положение, изме­
ренное в предыдущих сеансах зондирования. При этом с учетом сглаживания
между замерами будет происходить «подтягивание» равносигнального направ­
ления к истинному положению цели. Важным фактором при этом является то,
что ошибка измерения по формуле принимает минимальное значение (вблизи
нуля пеленгационной характеристики). Возможная потенциальная точность
(среднеквадратическая ошибка) измерения относительного угла места цели
при названном методе — около 0,1 от ширины ДНА в одном радиолокационном
контакте.
Азимут цели определяется по средневзвешенному значению в азимуталь­
ной пачке. СКО отсчета относительного азимута цели ожидается в пределах
0,3...0,4 от азимутального дискрета между квазинепрерывными пачками (цик­
лами когерентной обработки).
Для когерентной обработки сигнала применяются современные логиче­
ские интегральные схемы с высокой производительностью и разрядностью, по­
зволяющие существенно повысить тактико-технические характеристики РЛС.
Число зондирований в квазинепрерывной пачке на одной частоте повторе­
ния - около 200. Способ спектрального анализа - быстрое преобразование Фу­
рье (БПФ) на 128 точек со специальным амплитудным взвешиванием окна
БПФ, позволяющим получить диапазон частотной селекции до 90 дБ.
После когерентной обработки проводятся обнаружение отметок целей и
их первичная обработка в высокопроизводительной универсальной бортовой
ЭВМ, позволяющая с высокой достоверностью восстанавливать однозначную
дальность до целей, отсеивать «альтиметровые» помехи, порождаемые на вер­
тикальных боковых лепестках ДНА, и практически полностью использовать
потенциальные возможности РЛС для получения необходимых точностных ха­
рактеристик.
В режиме излучения с низкой частотой повторения линейно частотномодулированных импульсов с высокой энергией, круговой обзор осуществ­
ляется одной угломестной строкой, стабилизированной относительно горизон­
тальной плоскости. Приемные лучи ГАФАР переключаются вверх примерно на
половину их ширины с тем, чтобы нижний приемный луч совпадал с передаю­
щим лучом.
Цифровая обработка эхо-сигнала проводится только по нижнему лучу. В
процессе обработки осуществляются сжатие ЛЧМ-импульсов, некогерентное
накопление амплитуд азимутальной пачки импульсов, автоматическая выра­
ботка порога, обнаружение превысивших порог сигналов целей и подготовка
информации для отображения и сопровождения целей. Вследствие появления
отдельных «загоризонтных» помех от подстилающей поверхности захват отме­
ток на сопровождение может проводиться вручную в ограниченном азимутально-дальностном стробе.
В режиме излучения с низкой частотой повторения импульсов с широко­
полосной линейной частотной модуляцией круговой обзор также осуществля-
ется одной угломестной строкой, стабилизированной относительно горизон­
тальной плоскости.
Нижний приемный и передающий лучи, совпадающие по максимуму, при
помощи фазового распределения в раскрыве ГАФАР расфокусируются таким
образом, чтобы получить наименьшую «мертвую» воронку над подстилающей
поверхностью.
Эхо-сигнал после сжатия ЛЧМ-импульса подвергается детектированию в
специальном УПЧ-амплитудном детекторе с логарифмической характеристи­
кой в широком динамическом диапазоне, преобразованию в цифровой код и
цифровой обработке.
При цифровой обработке вырабатывается «плавающий» порог над фоном
отражения от земной поверхности и проводится обнаружение превысивших
порог отметок.
Обнаруженные отметки поступают в два параллельно работающих канала:
1) канал подготовки информации для панорамного отображения;
2) канал для подробного отображения (в выбранных азимутально-дальностных стробах) и автоматического (или полуавтоматического) сопровождения.
При подготовке информации для панорамного отображения осуществля­
ется объединение отметок в интервалах задержки, согласованных с разрешаю­
щей способностью на экране монитора. Одновременно с информацией эхосигналов на экране отображаются введенные оператором азимутальные дальностные стробы.
По пультовым командам в отведенных областях экрана отображается ин­
формация из стробов, обладающая полной разрешающей способностью. По
этой информации возможно автоматическое сопровождение (при ручном за­
хвате отметок) или полуавтоматическое сопровождение, когда оператор «под­
правляет» положение маркера относительно положения отметки, а передвиже­
ние маркера осуществляется автоматически по экстраполированным данным.
Для повышения вероятности обнаружения и сопровождения скоростных и
малозаметных целей и «обычных» целей в условиях умышленных помех ис­
пользуется второй канал обзорной РЛС в L-диапазоне волн. Работа вышегоризонтных каналов L-диапазона по обнаружению высотных скоростных и мало­
заметных целей иллюстрируется рис. 7.5.
Необходимо подчеркнуть, что для задач разведки наземных целей, кроме
традиционного радиолокатора с синтезированием апертуры антенны в санти­
метровом диапазоне волн имеется второй канал БРЛС — РСА в дециметровом
диапазоне, позволяющий обнаруживать сквозь листву объекты, «спрятанные»
за деревьями и кустами, а также ряд объектов, накрытых маскировочными се­
тями, достаточно эффективно поглощающими радиоволны сантиметрового
диапазона и недостаточно толстыми, чтобы поглощать радиоволны дециметро­
вого диапазона. Работу бортовой РЛС в режиме L-диапазона землеобзора ил­
люстрирует рис. 7.6.
Рис. 7.6
На канал БРЛС в L-диапазоне могут быть возложены функции по веера
курсному обнаружению воздушных целей на дальностях, превышающих рас­
стояние до радиогоризонта, а также по обнаружению малоразмерных надвод
ных кораблей на фоне отражений от морской поверхности.
Бортовая радиолокационная система в L-диапазоне также использует гиб­
ридную АФАР, интегрированную с антенными устройствами госопознавания
и системы передачи команд (на противоположной стороне вращающегося об­
текателя).
7.4. Перспективные комплексы, оснащенные
бортовыми радиолокационными системами
с активными антенными решетками
7.4.1. Комплекс типа АВАКС с БРЛС MESA
Данный комплекс на самолете Боинг 737-700 будет выполнять все основ­
ные задачи, возлагаемые на комплекс ЕЗ системы АВАКС, а также сможет
осуществлять функции воздушного командного пункта и центра авиационной
поддержки сухопутных войск (рис. 7.7). Экипаж самолета 2 человека и 6-10
операторов.
Основные тактико-технические характеристики самолета Боинг 737-700
представлены ниже:
Скорость полета
максимальная
патрулирования
Практический потолок
Практическая дальность полета (число М=0,6;Н=10 км)
Высота полета в зоне патрулирования
Время патрулирования без дозаправки на удалении 500 км
Размеры самолета:
длина
до
820 км/ч
600. ..700 км/ч
23 5 км
6500 км
13 км
8ч
33,63 м
35 79 м
32 18 м
размах крыла
высота (по килю)
Рис. 7.7.
Основным элементом радиоэлектронного оборудования нового самолета
является РЛС МЕСА (MESA - Multi-role Electronically Scanned Array), оснащен­
ная неподвижной АФАР с электронным сканированием ДН, разработанной фир­
мой «Нортроп-Грумман». В конструкции станции в отличие от конструкции РЛС
AN/APY-2 самолета Е-3 отсутствуют подвижные механические элементы, чт
позволяет существенно повысить надежность станции, уменьшить массу и раз
меры антенны (с учетом обтекателя) и улучшить летно-технические характери
стики самолета.
Дальность обнаружения низколетящих воздушных целей когерентно
импульсной РЛС при круговом обзоре пространства превышает 400 км, а заго
ризонтных и морских целей - до 600 км. Возможное число обнаруживаемых з
цикл сканирования целей до 3000. Для обнаружения Л А используется им
пульсно-доплеровский метод обработки сигналов с высокой частотой повторе
ния импульсов, а для сканирования надводного пространства применяется низ
кая частота повторения импульсов. Возможно одновременное обнаружен»
воздушных и надводных целей.
Обзор ведется в различных режимах, иллюстрируемых рис. 7.8. Непре
рывное электронное сканирование диаграммы направленности антенны в сек
торе 360° обеспечивает круговой обзор (рис. 7.8,я). Возможно применение сек
торного переднего обзора (рис. 7.8,в) и секторного бокового обзора (рис. 7.8,6
с сохранением кругового обзора с меньшей дальностью. Кроме того, возможе]
секторный обзор наиболее важных (опасных) объектов (рис. 7.8,г), в которое
обнаруживаются и сопровождаются цели на дальностях, в два раза больших
чем при круговом обзоре, за счет увеличения длительности накопления сигна
Рис. 7.8
лов. Некоторым недостатком обзора с вдольфюзеляжной АФАР является сни­
жение эффективности (прежде всего расширение диаграммы направленности
по азимуту) в переднем и заднем секторах обзора.
Время сканирования и ширина луча ДН антенны могут изменяться опера­
тором в диапазоне соответственно 3...40° с и 2...8°. Также оператор имеет
возможность изменить положение и размер сектора обзора надводного и воз­
душного пространства и фиксировать его относительно самолета или земли,
при этом дальность обнаружения может увеличиваться в 1,3 раза. Время об­
новления трассы при сопровождении маневрирующих целей может устанавли­
ваться равным 1,0 с.
Размещенная над фюзеляжем самолета АФАР (рис. 7.9) имеет высоту
2,4 м, длину - 10,7 м. АФАР содержит 288 приемопередающих твердотельных
модулей L-диапазона (1,2... 1,4 ГГц).
Для определения государственной принадлежности объектов и получения
от них информации на самолете установлен запросчик системы опознавания
«свой - чужой», работающий в диапазоне частот 1030...1090 МГц. Он обеспе­
чивает опознавание на дальностях до 550 км. В качестве антенны системы опо­
знавания, работающей в этом же диапазоне, используются АФАР РЛС. Однако
антенная решетка не может одновременно использоваться для опознавания и
обнаружения. Время опознавания может изменяться от 10 до 40 с.
Рис. 7.9
Комплекс РЭБ предназначен для индивидуальной защиты самолета и со­
держит систему оптоэлектронного противодействия AN/AAQ-24(V) «Немезис»
с лазерным устройством поражения фотоприемников ИК-головок самонаведе­
ния, автомат выброса дипольных отражателей и ИК ложных целей; ЭВМ ALR2001 (для управления работой комплекса).
Система AN/AAQ-24(V) «Немезис» обеспечивает обнаружение факта пус­
ка ракеты с любого направления на дальности до 10 км при использовании
комплекта из шести оптоэлектронных датчиков, работающих в ультрафиолето­
вом диапазоне спектра; сопровождение атакующих ракет с высокой точностью
(десятые доли градуса) при помощи охлаждаемого до температуры 77 К мат­
ричного фотоприемника с размерами чувствительных элементов 256x256 из
соединения теллурида и ртути; классификацию цели; выбор наиболее эффек­
тивного средства противодействия; выдачу команды на применение средств
противодействия.
Информацию о радиоэлектронной обстановке комплекс РЭБ будет получать
от станции Ρ и РТР EL/L-8300. Она работает в диапазоне частот 0,5...18 ГГц и
обеспечивает круговой обзор пространства на дальностях более 450 км и по­
зволяет распознавать типы РЭС, определять местоположение наземных, воз­
душных и надводных источников радиоизлучения.
Центральная ЭВМ, устанавливаемая на самолете, на 80% состоит из ком­
мерчески доступных элементов и имеет открытую архитектуру. Число АРМ,
установленных на борту, может изменяться от 6 до 14, при этом каждый опера­
тор имеет доступ к данным, получаемым от РЛС «Месса», и ко всем средствам
связи и передачи данных.
Комплекс системы раннего предупреждения и управления (AEWC) на са­
молете Боинг 737 с РЛС MESA имеет значительно более низкую стоимость
жизненного цикла и большой срок службы (более 30 лет). Гражданский само­
лет среднего класса с развитой системой коммерческого обслуживания на лю­
бом ТВД, малым расходом топлива и большим временем патрулирования (8 ч
без дозаправки) с возможностью отдыха экипажа обеспечивает возможность
круглосуточного патрулирования.
Гибкая структура, открытая модульная архитектура и глубокая диагно­
стика аппаратуры и программного оборудования значительно повышают бое­
вую устойчивость, упрощают и удешевляют техническое обслуживание и по­
зволяют проводить непрерывную в течение всего жизненного цикла модерни­
зацию комплекса.
Недостатком комплекса является использование самолета с нижним рас­
положением крыльев и двигателей, что вызывает экранирование излучения и
ограничивает минимальное расстояние зоны обзора морской поверхности и
низколетящих целей. Для уменьшения экранирования в процессе модерниза­
ции увеличена высота антенны над фюзеляжем на 50 см.
7.4.2. Система дальнего радиолокационного обнаружения
и управления «Фалкон» на самолете Боинг-707
Израильская фирма «Элта» разработала новую систему ДРЛОиУ «Фалкон»
(PHALCON - Phased-Array, L-band, CON formal) с БРЛС типа ΑΦ АР для эф­
фективного обнаружения воздушных и надводных целей.
Основные задачи, решаемые системой «Фалкон», аналогичны задачам, воз­
лагаемым на самолет Е-3 «Сентри» системы «Авакс». Главным ее отличием явля­
ется возможность выполнения функций воздушного командного пункта (ВКП).
Израильский вариант системы выполнен на базе самолета «Боинг-707»,
который является переоборудованным вариантом гражданского лайнера «Бо­
инг» 707-320В, оснащенным системой дозаправки топливом в воздухе. Его
продолжительность патрулирования составляет 12 ч.
Основные тактико-технические характеристики самолета ДРЛОиУ
«Боинг-707» системы «Фалкон» представлены ниже:
Экипаж
Скорость патрулирования
Высота патрулирования
Максимальная дальность полета
Максимальная взлетная масса
Размеры самолета:
длина фюзеляжа
размах крыла
высота (по килю)
4 человека
850...950 км/ч
8... 11 км
12000 км
155 τ
46,6 м
44,4 м
12,9 м
Основным элементом системы «Фалкон» является импульсно-доплеровская РЛС EL/M-2075 с электронным сканированием ДН. Ее характерная
особенность - наличие антенной системы, состоящей из шести конформных
АФАР L-диапазона (рис. 7.10), которая позволяет выполнять круговое элек­
тронное сканирование по азимуту. Контроль воздушной и надводной обстанов­
ки ведется в выделенных секторах (ширина сектора задается оператором). Время
обновления данных в секторах с высоким приоритетом составляет 2...4 с, а
с низким - 10...12 с. Каждая АФАР состоит из 768 твердотельных приемопере­
дающих модулей, объединенных в группы по восемь элементов в каждой. Эти
группы образуют шесть блоков, связанных с блоками других антенных реше­
ток для временного разделения ППМ. В состав РЛС входит также ЭВМ с
процессором обработки сигналов (производительность составляет около
1200 млн. опер/с), выполненным на основе коммерчески доступных модулей.
Рис. 7.10.
БРЛС может работать в шести основных режимах:
1) поиска и обнаружения воздушных объектов с применением высокой
частоты повторения импульсов;
2) раздельного сопровождения до ста целей;
3) поиска и обнаружения надводных объектов с применением низкой час­
тоты повторения импульсов;
4) медленного сканирования (для обнаружения низколетящих малораз­
мерных целей, в частности зависших вертолетов);
5) поиска и обнаружения целей на больших дальностях за счет увеличен­
ного времени накопления сигналов;
6) обнаружения источников радиоизлучения.
Перечисленные режимы работы РЛС могут чередоваться при любом по­
ложении луча ДН для обеспечения наилучшей точности и вероятности обна­
ружения объектов.
Тактико-технические характеристики РЛС EL/M-2075 представлены ниже:
Диапазон рабочих частот
,
Дальность обнаружения объектов:
бомбардировщик, надводный корабль
истребитель
крылатая ракета
Число одновременно сопровождаемых целей
Разрешающая способность по дальности
(в зависимости от длительности импульса)
Период повторения импульсов
Длительность импульсов
1215...1400 МГц
500 км
350 км
до 250 км
до 100
до 300 м
2,75. ..2,81; 5,214...5,31 мс
2,5; 3,9; 8,7; 9,5; 10; 16,5; 20 мкс
Для получения более детальной картины воздушной обстановки на ТВД и
повышения достоверности получаемой информации в системе «Фалкон» при­
меняется автоматическая корреляция данных от разнородных средств разведки
с последующим ее отображением на дисплеях операторов.
На самолете установлены 11 АРМ. Каждый оператор имеет доступ ко всем
данным, полученным от имеющихся на борту средств разведки. Дополнитель­
но предусмотрены шесть мест для отдыха экипажа и оперативной группы.
Оперативная группа системы «Фалкон» состоит из 13 операторов среди
которых: начальник смены; два оператора отвечающих за работу РЛС (без кон­
троля тактической обстановки); два, отвечающих за работу станций Ρ и РТР;
два, работающих с системами опознавания и отображения информации о воз­
душной обстановке; два обслуживают систему управления средствами связи;
два - систему управления средствами передачи данных; два отвечают за кон­
троль технического состояния бортового комплекса.
Предусмотрена возможность использования носителя в качестве воздуш­
ного КП и разведывательного самолета одновременно.
В целом система «Фалкон», уступая американской системе «Авакс» по
дальности обнаружения и числу одновременно сопровождаемых целей, обес-
печивает почти на порядок меньшее время захвата маневренных воздушных
целей, а также имеет более чем в два раза меньшую стоимость комплекта обо­
рудования. Кроме того, носитель обладает большей продолжительностью и
скоростью патрулирования без дозаправки топливом в воздухе.
Основным недостатком БРЛС комплекса «Фалкон» является снижение
эффективности обзора в переднем и заднем секторах вследствие меньшего
размера апертур АФАР, действующих в этих секторах.
7.4.3. Система дальнего радиолокационного обнаружения
и управления «Фалкон» на самолете Ил-76ТД
На самолеты Ил-76ТД системы «Фалкон» возлагаются задачи наблюдения
за воздушным пространством и морской поверхностью, контроля и управления
воздушным движением, наведения самолетов ТА, а также Ρ и РТР для вскры­
тия дислокации и состава РЭС противника (в первую очередь системы ПВО).
Самолет Ил-76ТД обеспечивает разведку при полете на высотах 9...11 км,
скорости 600...700 км/ч в течение 8 ч (без дозаправки). Максимальная взлетная
масса самолета 195 т, длина разбега - 2000 м, длина пробега при посадке - 1000 м.
Многофункциональная импульсно-доплеровская РЛС имеет круговую зо­
ну обзора и предназначена для обнаружения и сопровождения воздушных и
надводных целей. Она работает в L-диапазоне (1280...1400 МГц) на одной из
22 частот с разносом 5 МГц. При этом используется большое число сложных
зондирующих сигналов. Максимальная мощность излучения РЛС в импульсе
составляет 175 кВт.
В состав станции входят три АФАР в виде равностороннего треугольника,
размещенные в неподвижном грибообразном обтекателе диаметром 11м, по­
добном комплексам ЕЗ и РЛДН. Каждая АФАР обеспечивает сектор обзора по
азимуту 120° и состоит из 864 активных ППМ, которые осуществляют элек­
тронное сканирование ДН в двух плоскостях. Антенные решетки имеют длину
8,87 м и высоту 1,73 м. Модули выполнены на твердотельных элементах и раз­
биты на 108 групп по восемь в каждой.
Сканирование ДН осуществляется в пределах по углу места ±17,5°, по
азимуту ±60°. В зависимости от режима работы в каждом положении луча ДН
излучаются разные пачки импульсов, различающиеся в первую очередь часто­
той повторения. Несущая частота изменяется автоматически от импульса к им­
пульсу или от одного положения луча ДН к другому. Для повышения энергии
(средней мощности) сигнала и защиты от помех применяется внутриимпульсное изменение частоты при цифровом сжатии импульса. Кроме того, применя­
ется когерентный режим бланкирования боковых лепестков ДН с подавлением
их уровня на 15 дБ.
Благодаря быстрому изменению пространственного положения луча ДН и
вида зондирующих сигналов станция может практически мгновенно переклю­
чаться с режима поиска и сопровождения воздушных объектов (средняя часто­
та повторения импульсов) на режим обнаружения и сопровождения надводных
объектов (низкая частота повторения импульсов) и обратно.
В режиме поиска и сопровождения воздушных объектов используются
подрежимы: поиск; поиск в дальней зоне; полномасштабное сопровождение;
высокоточное сопровождение; сопровождение высокоманевренных объектов.
Тактико-технические требовании по обнаружению и сопровождению рас­
считывались на воздушный объект с ЭПР, равной 5 м2. ЭПР цели флуктуирует
от импульса к импульсу. Воздушная цель имеет радиальную скорость относи­
тельно самолета от 30 до 500 м/с, маневрирует с ускорением 4g (подрежим по­
иска) и 9g - при сопровождении высокоманевренных целей. Время обновления
трассы осуществляется с периодом 2 с. В режиме поиска и сопровождения воз­
душных объектов применяется до четырех пачек импульсов с разной частотой
повторения в каждом пространственном положении луча ДН.
Особенностью работы РЛС является наличие моноимпульсного измерения
угловых координат целей в процессе сканирования. Поиск целей осуществля­
ется в секторе 360° по азимуту (одной «строкой» луча) за 9,3 с, а в дальней зоне
за 19 с. При этом в обоих случаях 0,2 с отводится на проверку работоспособно­
сти РЛС встроенной системой контроля.
Тактико-технические характеристики РЛС следующие:
Максимальная дальность обнаружения:
воздушных целей (ЭПР=5 м2)
440 км,
надводных целей (ЭПР=15000 м2)
425 км
Число одновременно сопровождаемых воздушных объектов
до 500
Разрешение:
по дальности
воздушных целей
200 м
надводных целей
600 м
по азимуту
2°
по углу места
10,2°
Точность измерения координат целей:
по дальности, СКО
воздушных целей
30 м
надводных целей
125 м
по азимуту
воздушных целей
0,34°
надводных целей
0,52°
по углу места
3°
Точность определения радиальной скорости воздушных целей (в дальней зоне), СКО .... 11(5) м/с
Высокоточное сопровождение осуществляется после ручной установки
отметки цели на экране индикатора посредством четырех последовательных и
независимых моноимпульсных измерений, в результате которых ошибка изме-
рения дальности до воздушной цели снижается до 10 м, азимута - до 0,09°, уг­
ла места (на дальности 200 км) - 0,23°, а радиальной скорости - до 2 м/с.
Обнаружение воздушных целей по доплеровскому сдвигу частоты в диа­
пазоне радиальных скоростей от 100 до 1800 км/ч обеспечивается на дально­
стях от 30 до 440 км с вероятностью 0,9. При обнаружении и сопровождении
надводных объектов с ЭПР<500 м сигналы воздушных целей отфильтровыва­
ются и отображаются отдельно от сигналов надводных целей.
Проверка работоспособности РЛС может проводиться при подготовке к
полету или автоматически в процессе полета. Калибровка АФАР и приемопе­
редающего тракта выполняется по команде оператора, при этом работа РЛС в
других режимах прекращается.
Станция РТР позволяет обнаруживать, классифицировать и определять
местоположение наземных и корабельных источников радиоизлучения, рабо­
тающих в диапазоне частот 0,5...40 ГГц на дальностях 400...500 км. Разведка
ведется по излучениям всех видов поляризаций.
Направление (пеленг) на ПРИ определяется интерферометрическим спо­
собом при помощи двух разнесенных антенн. Данные РТР коррелируются с ра­
диолокационными, благодаря чему повышаются дальность и вероятность рас­
познавания класса и типа объекта.
В состав станции РТР входят четыре группы антенн, расположенные на
законцовках крыла, в носовой и хвостовой частях самолета; предварительный
усилитель; широкополосное и узкополосное приемные устройства.
В каждую группу антенн входят четыре спиральные антенны (две для
приема непрерывных и импульсных сигналов в диапазоне частот 0,5...2 ГГц и
две - для приема непрерывных сигналов в диапазоне частот 2...18 ГГц); две
рупорные антенны (для приема непрерывных и импульсных сигналов в диапа­
зоне частот 18...40 ГГц); две конические (для приема импульсных сигналов в
диапазоне частот 2...6 ГГц и 6... 18 ГГц).
Полоса пропускания по промежуточной частоте супергетеродинного уз­
кополосного приемного устройства с двойным преобразованием частоты со­
ставляет 10, 50 и 250 МГц, а чувствительность - (-80) дБ. Полоса пропускания
широкополосного приемного устройства составляет 4 ГГц и разделена на 16
поддиапазонов, 250 МГц каждый.
Динамический диапазон по входным сигналам составляет 50 дБ, чувстви­
тельность - 70 дБ, а допустимая плотность сигналов - 1 млн имп./с. Точность
определения частоты непрерывного сигнала составляет 100 кГц, импульсного 1МГц, а длительности импульса - 50 не.
В горизонтальной плоскости обеспечивается всенаправленный прием, в
вертикальной плоскости - в секторе -30°+10° в диапазоне 0,5...18 ГГц и в сек­
торе -10°+10 ° в диапазоне 18...40 ГГц. Среднеквадратическая ошибка пелен­
гования источников импульсного сигнала по углу места в секторе ±10° состав­
ляет 2°, а непрерывного - 9°.
Оператор поста РТР может проводить сортировку всех принятых сигналов
по частоте, координатам и типу носителя. В базу данных для автоматического
распознавания перед каждым вылетом вводятся характеристики до 500 типов
источников.
Станция радиоразведки обеспечивает перехват сигналов станций радио­
связи воздушного, морского и наземного базирования в диапазоне частот
30...500 МГц, их пеленгование в диапазоне 100...500 МГц, автоматический
технический анализ сигналов и регистрацию в цифровом виде принимаемых
сообщений. В состав станции входят подсистемы поиска и автоматического
пеленгования ИРИ; обработки и технического анализа сигналов.
Первая подсистема содержит десять антенных решеток, устройство обра­
ботки ВЧ-сигналов, двухканальное широкодиапазонное приемное устройство;
широкополосное устройство обработки сигала. Чувствительность радиоприем­
ного устройства станции радиоразведки составляет минус 102 дБ (при приеме
ЧМ-сигнала с шириной полосы 20 кГц и отношении «сигнал/шум» - 17 дБ) и
104 дБ (при приеме AM сигнала с полосой 10 кГц, глубиной модуляции 50% и
отношении «сигнал/шум» 10 дБ). Точность определения пеленга не хуже 4°,
разрешающая способность по частоте - 1 кГц, максимальное число предвари­
тельно настраиваемых частот 1024, скорость перестройки 500 каналов/с, сред­
нее время наработки на отказ 400 ч.
Подсистема обработки и технического анализа сигналов будет состоять из
приемной антенны, разветвителя ВЧ-сигнала, двух радиоприемных и одного
устройства регистрации. Для отображения полной и более точной картины ра­
диоэлектронной обстановки планируется использовать данные, полученные в
ходе предыдущих полетов и по каналам передачи данных от внешних источни­
ков радиоразведки.
Аппаратура системы опознавания «свой-чужой» выполняет опрос обнару­
женных объектов путем излучения кодированного сигнала запроса и анализа от­
ветного сигнала. При этом проводится индивидуальное опознавание с опреде­
лением бортового номера самолета (корабля), его местоположения, государствен­
ной принадлежности и некоторых других данных. Индикация «своего» объекта
осуществляется путем дополнительной отметки на экране индикатора РЛС.
Основными элементами аппаратуры опознавания являются запросчик; три
антенные решетки (ширина 12 см, размещаются над каждой АФАР РЛС); за­
дающий генератор; блок электропитания. Антенные решетки системы опозна­
вания (коэффициент усиления 18 дБ) формируют узкую ДН в азимутальной и
веерную в угломестной плоскостях. Система работает в стандартных режимах
опознавания: 1, 2, 3/А, С и 8. Период кругового сканирования пространства (за
исключением режима 8) с одновременным опросом 12 объектов равен 11с, при
этом за один цикл кругового сканирования (30 с) одновременно опрашивают до
восьми объектов. Вероятность правильного опознавания превышает 0,9.
Тактико-технические характеристики аппаратуры системы опознавания
«свой-чужой» следующие:
Рабочие частоты:
запросчика
приемника
Дальность действия
Число одновременно сопровождаемых воздушных объектов
Количество обрабатываемой информации в секунду
Ширина луча ДН по азимуту
Время одного периода сканирования
Мощность передатчика
Точность определения, СКО:
дальности
азимута
1030 ±0,2 МГц
1090 ±0,2 МГц
400 км
до 500
до 60
2,54 °
11с
2 кВт
50 м
0,25°
Бортовая аппаратура связи и передачи данных состоит из базовой аппара­
туры самолета и дополнительной. В первую группу входят две УКВ-радио­
станции (ОВЧ/УВЧ-диапазонов), один приемопередатчик и один приемник КВдиапазона.
Дополнительно устанавливаемая аппаратура связи содержит десять УКВ
радиостанций (ОВЧ/УВЧ-диапазонов), станцию спутниковой связи Ки-диапазона, две радиостанции СВЧ-диапазона. В комплект аппаратуры войдут также
программно-аппаратные средства управления связью, система внутренней свя­
зи и передачи данных.
УКВ-радиостанции обеспечивают связь и обмен данными с наземными,
надводными и воздушными объектами, используя AM- и ЧМ-сигналы с про­
граммируемой перестройкой радиочастоты (ППРЧ) по 128 частотам со скоро­
стью 100 скачков/с. Две из десяти радиостанций могут использоваться в каче­
стве ретрансляторов. Данные для организации связи (частота, режим работы,
вид сигнала и др.) вводятся оператором вручную.
Радиостанции СВЧ-диапазона используются для высокоскоростного
(64 кбит/с) обмена разведывательными данными с наземными пунктами прие­
ма и обработки информации. Прием данных осуществляется на двух частотах,
а передача - на одной частоте. Эти радиостанции также обеспечивают теле­
фонную связь по двум дуплексным каналам. Две всенаправленные антенны ра­
диостанций размещены так, чтобы при любом положении самолета обеспечи­
вался устойчивый прием сигналов. Для снижения вероятности перехвата ин­
формации используется широкополосный сигнал (ширина спектра 1 МГц).
Тактико-технические характеристики аппаратуры связи и передачи дан­
ных представлены ниже:
Диапазон рабочих частот радиостанций:
ОВЧ
УВЧ
СВЧ
108...174 МГц
225...400 МГц
4,4...5 ГГц
Разнос каналов для ОВЧ/УВЧ-диапазонов
Номинальная выходная мощность в режиме AM (ЧМ)
Чувствительность приемника в режиме AM (ЧМ)
Дальность связи:
ОВЧ/УВЧ-диапазон
СВЧ-дипазон
Мощность передатчика в СВЧ-диапазоне
25 кГц
10(16)
104 (107) дБмВт
400 км
350 км
2,5 Вт
Станция спутниковой связи работает в Ки-диапазоне (14...12 ГГц). Она
обеспечивает передачу данных со скоростью 64 кбит/с на наземные (корабель­
ные) пункты приема информации, расположенные на большом удалении от са­
молета, а также телефонную связь по двум дуплексным каналам.
Комплекс индивидуальной защиты самолета Ил-76ТД системы «Фалкон»
состоит из системы предупреждения о приближении ракет, автоматов выброса
дипольных отражателей и инфракрасных ложных целей. В системе предупреж­
дения о приближении ракет используется аппаратура израильской компании
«Элта» EL/M-2160VI, включающая активную импульсно-доплеровскую РЛС
(диапазон рабочих частот 1...1,2 ГГц) и комплект штыревых антенн. Данная
система позволит обеспечивать круговой обзор воздушного пространства, ото­
бражать на специальном дисплее приближающиеся ракеты, выдавать звуковые
сигналы предупреждения экипажу и команды для выброса дипольных отража­
телей и ИК ложных целей.
На борту самолета размещены 12 АРМ: восемь мест операторов для ана­
лиза воздушной обстановки, опознавания и наведения истребителейперехватчиков; по одному АРМ операторов станций радиоразведки, РТР, свя­
зи, контроля технического состояния бортового комплекса. Все рабочие места
объединены в единую локальную сеть стандарта Ethernet.
*
7.4.4. Самолет дальнего радиолокационного обнаружения
и управления SAAB 100В «АРГУС» системы FSR-890
Шведская фирма «Эрикссон» в интересах национальных ВВС разработала
самолет ДРЛО SAAB 100В «Аргус» системы FSR-890, которая позволяет обна­
руживать и сопровождать воздушные цели и передавать данные о них на на­
земные (корабельные) ПУ.
Данный самолет в отличие от американского самолета Е-3 не выполняет
функции управления и наведения ТА, а служит только ретранслятором команд
наведения с наземных ПУ. Однако в перспективе разработчики предусматри­
вают размещение на нем аппаратуры для решения задач управления и наведе­
ния самолетами ТА.
В отличие от американских самолетов РЛС шведского самолета может
выполнять селекцию наземных движущихся целей.
Шведская система установлена на самолете SAAB 100B «Аргус», показанном
на рис. 7.11, выполненном на базе грузопассажирского самолета SAAB 340B,
оснащенного двумя турбовинтовыми двигателями СТ7-9В фирмы «Дженерал
электрик» с максимальной мощностью 1400 кВт каждый.
Рис. 7.11
Основные тактико-технические характеристики самолета SAAB 100B
«Аргус» следующие:
Экипаж
Скорость:
максимальная
патрулирования
Практический потолок
Высота патрулирования
Масса:
пустого самолета
максимальная взлетная
Геометрические размеры:
длина фюзеляжа
размах крыла
высота (по килю)
2 человека
460 км/ч
300 км/ч
9,5 км
7,6 км
10,46 т
13,2 τ
20,46 м
21,44 м
6,97 м
Основу системы FSR-890 составляет многофункциональная импульснодоплеровская РЛС PS-890 «Эриай» 10-см диапазона длин волн (S-диапазон,
3,2 ГГц). Она осуществляет обзор пространства по азимуту в двух перпендику­
лярных продольной оси антенны секторах шириной ±75°, а по углу места - ±9°.
Максимальная дальность обнаружения воздушных целей - 450 км, при этом
возможно их загоризонтное обнаружение. Для обеспечения максимальной
мощности излучения в целях увеличения дальности обнаружения предусмот­
рена возможность сканирования пространства только с одной стороны. РЛС
может обнаруживать объекты, движущиеся со скоростью 14.. .2000 км/ч.
Станция имеет три основных режима работы: нормальный и расширенный
обзор воздушного пространства; обзор надводного (наземного) пространства.
В расширенном режиме дальность обнаружения целей увеличивается (для
объекта с ЭПР = 2 м2 составляет 300 км) за счет сужения сектора сканирования
и увеличения времени обзора.
Тактико-технические характеристики РЛС PS-890 «Эриай» следующие:
Диапазон рабочих частот
Длительность излучаемых импульсов
Частота повторения импульсов
Выходная импульсная мощность
Дальность обнаружения воздушных целей:
типа «бомбардировщик»
типа «истребитель»
типа «крылатая ракета»
надводных (наземных) целей
Число:
обнаруживаемых целей
сопровождаемых целей
сопровождаемых целей (в процессе сканирования)
Разрешаемая способность:
по дальности
»
по азимуту
по углу места
Точность определения местоположения объектов:
по дальности
по азимуту
Ширина ДН антенны:
по азимуту
по углу места
Размеры антенны:
длина
ширина
Масса РЛС
3155...3260 МГц
5... 13 мкс
9...16 кГц
0,5 МВт
400 км
300 км
100 км
до 300 км
2000
до 300
100
50 м
1,5°
7°
15 м
0,5°
1°
9°
9,75 м
0,78 м
900 кг
Станция оснащена АФАР с электронным сканированием луча ДН. Она
расположена в надфюзеляжном радиопрозрачном пеналообразном корпусе в
форме балки прямоугольного сечения, в котором установлены 192 ППМ. Ох­
лаждение ППМ проводится потоком воздуха, поступающим через воздухоза­
борник, сделанный в передней части пеналообразного корпуса. Антенна имеет
низкий уровень боковых лепестков (не превышает -50 дБ), благодаря чему
обеспечивается высокая помехозащищенность.
Управление лучом ДН осуществляется автоматической системой, которая
для каждого импульса задает свое направление излучения. Это позволяет уве­
личить дальность, скорость и точность обнаружения объектов.
В РЛС применяются адаптированные по форме сигналы с ЧМ- и фазовой
манипуляцией со сжатием импульсов и изменяющейся рабочей частотой. Для
исключения неоднозначности измерения расстояния до объекта и повышения
точности определения координат и скорости движения цели используется низ­
кая и средняя частоты повторения импульсов.
В состав системы FSR-890 для определения государственной принадлеж­
ности объекта, а также получения информации о барометрической высоте по­
лета военных и гражданских ЛА входит аппаратура системы опознавания
«свой-чужой» Мк12. Опрос обнаруженных объектов осуществляется путем из­
лучения сигнала запроса и анализа ответного сигнала. При этом проводится
индивидуальное опознавание с определением бортового номера самолета (ко­
рабля), его местоположения, государственной принадлежности и некоторых
других данных. Индикация «своего» объекта осуществляется путем дополни­
тельной отметки на экране индикатора РЛС.
Основными элементами системы опознавания являются запросчик, две ан­
тенные решетки (размещены на концах пеналообразного корпуса); задающий
генератор. Антенные решетки формируют узкую ДН в азимутальной и веерную
в угломестной плоскостях.
Рабочая зона по азимуту совпадает с секторами обзора РЛС, дальность об­
наружения превышает 300 км. Точность определения координат сопровождае­
мых объектов составляет 1... 1,5°.
Станция Ρ и РТР позволяет обнаруживать, классифицировать и определять
местоположение воздушных, наземных и корабельных источников радиоизлу­
чения в диапазоне частот 0,5... 18 ГГц (возможно расширение верхней границы
до 40 ГГц) на дальностях до 400 км.
Антенная система станции в горизонтальной плоскости осуществляет всенаправленный прием, в вертикальной — в секторе —35°+15° (диапазон частот
0,5...2 ГГц) и -20°+15° (диапазон частот 2...18 ГГц). Точность определения не­
сущей частоты импульсного сигнала равна 8 МГц (при высокой точности 1 МГц), а непрерывного - 100 кГц. Направление прихода импульсного сигнала
определяется с точностью не хуже 2°, непрерывного — 5°.
Данные Ρ и РТР сравниваются с образцами сигналов, хранящихся в базе
данных (более 2000) и коррелируются с радиолокационной информацией, бла­
годаря этому повышаются дальность и вероятность распознавания класса и ти­
па объекта. Кроме того, вся полученная информация сохраняется в запоми­
нающем устройстве и по мере необходимости передается на наземные пункты
приема и обработки информации в масштабе времени, близком к реальному.
Аппаратура связи и передачи данных имеет четыре УКВ-радиостанции
(ОВЧ - и УВЧ-диапазонов), спутниковую связь Ки -диапазона и две вспомога­
тельные радиостанции СВЧ-диапазона.
УКВ-радиостанции обеспечивают телефонную связь и обмен данными
(скорость передачи 4,8 кбит/с) с воздушными объектами, используя AM- и ЧМсигналы с ППРЧ.
Радиостанции СВЧ-диапазона используются для высокоскоростного
(64 кбит/с) обмена разведывательными данными с наземными и корабельными
пунктами приема и обработки информации на дальностях до 300 км, а также
для телефонной связи с ними по двум дуплексным каналам. В данных станциях
для снижения вероятности перехвата информации используется широкополос­
ный сигнал (ширина спектра около 1 МГц).
Спутниковая связь используется для передачи данных на пункты приема и
обработки информации, расположенные на большом удалении от самолета, а
также для обеспечения двух дуплексных каналов телефонной связи.
Система навигации самолета решает задачи определения пространственного
местоположения и скорости носителя для точной географической привязки коор­
динат целей, находящихся в пределах зоны обзора системы FSR-890 и стабилиза­
ции положения антенны РЛС. Для повышения точности определения местополо­
жения самолета ДРЛО на его борту дополнительно устанавливаются инерциальная навигационная система (ИНС) и приемник «Навстар», которые позволяют
определять координаты самолета с точностью не хуже 10 м, а скорость - 0,6 м/с.
Комплект аппаратуры индивидуальной защиты самолета состоит из сис­
тем предупреждения о приближении ракет и об облучении, а также автоматов
выброса дипольных отражателей и ИК ложных целей.
На борту самолета размещены два АРМ. Операторы этих АРМ могут частич­
но обрабатывать информацию, контролировать ее сбор, производить при необхо­
димости настройку/перестройку аппаратуры, а также принимать меры к устране­
нию возникающих нештатных ситуаций. Оба АРМ объединены в локальную сеть.
На цветных мониторах АРМ на фоне электронной карты местности отобра­
жаются результаты поиска и сопровождения воздушных или надводных (назем­
ных) целей. На мониторы могут выводиться также дополнительные данные: об
авиабазах; о разрешенных и запрещенных зонах (коридорах) полетов; о зоне об­
зора РЛС; об ИРИ, обнаруженных средствами Ρ и РТР; о ЛА (с указанием при­
надлежности «свой-чужой», координат, скорости, направления движения и др.).
Главными особенностями самолетов SAAB 100B системы FSR-890 явля­
ются простота конструкции, высокая надежность, низкая стоимость, неболь­
шой штат обслуживающего персонала.
Аналогичный комплекс установлен также на самолете ЕМВ145 (Брази­
лия), показанном на рис. 7.12.
Рис. 7.12
7.4.5. Палубный самолет дальнего радиолокационного обнаружения
и управления «Хокай-2000» с БРЛС типа АФАР
Комплекс «Хокай-2000» является модернизированным (пятое поколение)
вариантом системы Е-2С (рис. 7.13).
Рис. 7.13
Основные ТТХ палубного самолета «Хокай» (экипаж самолета состоит из
двух летчиков и трех операторов) представлены ниже:
Максимальная взлетная масса
Максимальная скорость полета на высоте 4000 м
Крейсерская скорость
Продолжительность патрулирования на удалении 370 км от корабля
Практический потолок
Максимальная перегоночная дальность полета
Геометрические размеры:
длина фюзеляжа
размах крыла/в сложенном положении
высота (с учетом обтекателя РЛС)
24,6 τ
600 км/ч
576 км/ч
5,5 ч
8,8 км
2700 км
17,54 м
24,56/8,94 м
5,58 м
Главными задачами при модернизации комплекса Е-2С по программе соз­
дания системы «Хокай-2000» и в дальнейшем «Усовершенствованный «Хо­
кай», являются:
1) обеспечение обнаружения воздушных целей всех типов как над мор­
ской поверхностью, так и в приобрежных зонах и над земной поверхностью со
сложным рельефом местности;
2) увеличение в 1,5 раза дальности обнаружения и сопровождения мало­
размерных, малозаметных, малоскоростных и высокоскоростных воздушных
целей и надводных целей (ракетных и торпедных катеров, перископов подвод­
ных лодок, малых судов в прибрежной зоне);
3) обнаружение момента пуска и сопровождение противокорабельных и
крылатых ракет с различных носителей (воздушных, морских);
4) увеличение одновременно сопровождаемых воздушных целей (до 2600);
5) повышение помехозащищенности и электромагнитной совместимости
за счет пространственно-временной обработки сигналов.
Элементы бортового радиоэлектронного комплекса условно сведены в
шесть основных взаимосвязанных подсистем: обнаружения, опознавания, нави­
гации, связи и передачи данных, обработки данных, отображения и управления.
Главным отличием комплекса оборудования «Усовершенствованный Хокай»
является использование новой импульсно-доплеровской БРЛС с активной фа­
зированной антенной решеткой AN/APS-XX.
Как и ранее, антенная решетка расположена во вращающемся обтекателе
размером 7,32 χ 0,77 м и имеет антенную структуру из 18 элементов, работаю­
щих в Р-диапазоне (415.. .450 МГц). Структура БРЛС показана на рис. 7.14.
Рис. 7.14
Высокостабильный опорный генератор и синтезатор сигналов обеспечи­
вают когерентность всего тракта РЛС и формирование всех высокочастотных
сигналов и сигналов синхронизации.
При помощи фазовращателей ФВ обеспечивается требуемое фазовое рас­
пределение излучаемой ЭМВ на апертуре антенны и, соответственно, положе­
ние по азимуту и форма ДН антенны на передачу. Формирователь зондирую-
щего сигнала и усилители мощности передающих модулей обеспечивают не­
обходимую форму и мощность излучаемых импульсов.
При приеме отраженной ЭМВ каждый элемент антенной решетки при по­
мощи переключателей прием-передача ППП подсоединяется на вход своего
малошумящего усилителя МШУ. На выходе МШУ аналоговые сигналы при
помощи АЦП преобразуются в цифровые сигналы.
Соединение элементов антенной решетки с приемопередающими модуля­
ми осуществляется через вращающийся переход ВП.
Диаграмма направленности на прием формируется в цифровом виде про­
цессором.
При механическом круговом вращении антенной решетки со скоростью
6 об/мин (один оборот за 10 с) одновременно может проводиться электронное
сканирование ДН в секторе ±60° с различной скоростью.
Адаптивная пространственно-временная обработка сигналов обеспечивает:
1) формирование нулей ДН антенны в направлении источников помех
(станции РЭП; телевизионные, связные и другие станции, работающие в этом
же диапазоне частот);
2) оптимизацию селекции сигналов воздушных и надводных целей на лю­
бом мешающем фоне;
3) повышение эффективности обнаружения и захвата сигналов малораз­
мерных целей и точности измерения координат.
Процессоры сопровождения и наведения обеспечивают решение задач
целеуказания и наведения своих истребителей и ракет на воздушные и мор­
ские цели.
Преимуществом новой РЛС является возможность изменения в широком
диапазоне параметров сигналов излучения и алгоритмов обработки. Пере­
стройка несущей частоты производится от одной когерентной пачки импульсов
к другой. Модуляция сигнала внутриимпульсная, частотная 0,5...3,5 МГц (ко­
эффициент сжатия импульсов 100...700). Длительность зондирующих импуль­
сов 1...20; 50; 100 и 150 мкс, частота повторения импульсов 125... 1500 Гц. Вы­
бор сигналов проводится в зависимости от решаемых задач и сложившейся ра­
диоэлектронной обстановки.
Дальность обнаружения малоразмерной низколетящей цели составляет
340 км (максимальная дальность действия - 620 км), а разрешающая способ­
ность по дальности — 45 м.
Дальнейшая модернизация комплекса «Хокай» предполагает использовать
в надфюзеляжном обтекателе три неподвижных АФАР в виде равностороннего
треугольника, что обеспечит электронное сканирование ДН антенны в круго­
вом секторе. Диапазон рабочих частот АФАР будет изменен в сторону L-,
S-диапазонов.
7.4.6. Самолет базовойпатрульнойавиации Р-8А «Посейдон»
В США разработан новый самолет БПА Р-8А «Посейдон», который дол­
жен заменить существующие самолеты Р-ЗС «Орион». Важной особенностью
нового самолета является применение в составе бортового разведывательного
оборудования РЛС, имеющей возможность вести разведку в режимах синтези­
рования апертуры и инверсного синтезирования. Последний режим особенно
эффективен при решении задач по разведке надводных целей (включая задачу
обнаружения перископов подводных лодок).
Бортовая радиолокационная система РЛС AN/APY-10, которая является
модернизированным вариантом AN/APS-137(V)S, была разработана как поис­
ковая, способная обнаруживать и сопровождать наземные цели, перископы и
шноркели подводных лодок. Она имеет широкие возможности в плане иденти­
фикации обнаруженных целей, оценки боевых потерь и слежения. Более эф­
фективное обнаружение перископов подводных лодок обеспечивается за счет
использования цифрового сканирующего конвертера и малошумящего предусилителя на входе. Архитектура ИРСА позволяет вести съемку с высоким раз­
решением, повышает возможности по распознаванию (классификации) малых
быстродвижущихся целей, располагающихся недалеко от берега. Основные
функциональные возможности РЛС:
1) обнаружение и слежение за наземными (надводными) целями на боль­
шом расстоянии;
2) более надежное обнаружение перископов;
3) ведение морской разведки с большой высоты;
4) сопровождение множественных целей;
5) высокая устойчивость к подавлению и противодействие ложным целям;
6) управление на программном уровне;
7) совместимость с системами управления ракетами «Гарпун», «Томахок»
и другими;
прямое взаимодействие с системами управления оружием.
Радиолокационная система работает в режимах:
РСА (длительность импульса 13,2 мкс, средняя мощность 350 Вт, разре­
шение 2.. .200 м, частота следования импульсов зависит от дальности);
ИРСА (соответственно 10 мкс, 230...500 Вт; разрешение 0,6...1,2 м и
500... 1000 Гц);
обнаружение перископов (5 мкс, 460 Вт и 1,854 кГц);
поиск/навигация (10 мкс, 200 Вт и 388 Гц).
Также планируется оснастить самолет комплексом электронного противо­
действия, состоящим из системы управления средствами РЭБ AN/ALQ-213 (V),
системы направленных ИК-помех, системы предупреждения о радиолокацион­
ном облучении и системы постановки активных помех.
7.4.7. Информационно-разведывательные комплексы
на аэростатах и дирижаблях
Аэростаты и дирижабли, оснащенные информационно-разведывательны­
ми комплексами, могут обеспечить выполнение функциональных задач ком­
плексов типа Авакс, Хокай и Джистарс.
Главным преимуществом таких комплексов по сравнению с авиационны­
ми является возможность непрерывного при неограниченной длительности
контроля воздушного, надводного и наземного пространства в заданной зоне
ответственности при минимальной стоимости жизненного цикла (создания,
применения и технической эксплуатации). Так, стоимость эксплуатации аэро­
статного комплекса в течение года может быть на порядок меньше эксплуата­
ции комплекса типа АВАКС, а стоимость обеспечения зоны обзора протяжен­
ностью 1000 км - в три раза меньше.
Примером использования таких комплексов служит создаваемая сеть
TARS (Tethered Aerostat Radar System - радиолокационная система на привяз­
ных аэростатах) на южной границе США. Привязной аэростат 420К объемом
11340 м заполнен гелием и имеет аэродинамическую форму корпуса длиной
62,7 м и максимальным диаметром 20,7 м (рис. 7.15).
Рис. 7.15
Аэростаты поднимаются на высоты 3,0...4,5 км и опускаются при помощи
лебедки. Они могут непрерывно находиться в воздухе 5...7 дней. Электропита­
ние подается по кабель-тросу. В случае неблагоприятных погодных условий
(тайфуны) аэростаты опускают и швартуют к причальной мачте. Для южных
штатов США, где расположены аэростаты, их боеготовность составляет 98%.
Полезная нагрузка на рабочей высоте составляет 480 кг.
Фирма «Локхид-Мартин» разрабатывает проект аэростата, который может
подниматься на высоту 20...22 км, где практически отсутствует ветер
(рис. 7.16), что обеспечивает устойчивость положения аэростата.
Рис. 7.16
Основной проблемой в этом случае является возможность автономного
электроснабжения.
Комплекс 420К оснащен радиолокатором L-88(V)3, расположенным в
нижней части аэростата в радиопрозрачной гондоле. РЛС имеет антенну с раз­
мером апертуры 8,7 м. Круговой обзор для обнаружения низколетящих целей
обеспечивается механическим вращением антенны.
Дальность зоны обзора 370 км определяется радиогоризонтом.
Рассматриваются также варианты использования РЛС L-диапазона с ан­
тенной типа АФАР цилиндрической формы, размещаемой в радиопрозрачном
обтекателе того же размера.
Наряду с аэростатами рассматривается возможность использования авто­
матических высотных дирижаблей для размещения информационно-разведы­
вательных комплексов. По сравнению с аэростатами они обладают большей
оперативностью, автономностью, большей грузоподъемностью. Всепогодное,
круглосуточное электроснабжение при полетах на высотах 20-22 км обеспечи­
вается солнечными батареями большой площади и электрогенераторами. Ком­
плексы на дирижабле могут непрерывно работать в течение нескольких меся­
цев и даже лет [4] (рис. 7.17). Дальность обзора низколетящих, морских и на­
земных целей на таких высотах достигает 600 км.
Рис. 7.17
Радиолокаторы комплексов будут иметь антенны типа АФАР с излучате­
лями, размещенными на боковой поверхности дирижабля (рис. 7.18).
Рис. 7.18
Детальное наблюдение морских и наземных целей обеспечивается в ре­
жиме синтезирования апертуры при работе в Х-диапазоне, что позволяет полу­
чить разрешение (детальность изображения) 1,5...15 м в зоне обзора по даль­
ности 20 и 200 км. Дирижабль в этом режиме должен двигаться со скоростью
100 км/ч.
В этом режиме обеспечивается обнаружение малоразмерных наземных
целей (танков, БМП, ЗРК и т. п.). Режим селекции движущихся целей позволя-
ет выделять цели, имеющие радиальную скорость от 1,0 до 200 км/ч. В интерферометрическом режиме измеряется высота рельефа местности с точно­
стью 10... 15 м.
Разведывательно-информационные комплексы, размещаемые на аэроста­
тах и дирижаблях, дополняют авиационные комплексы типа АВАКС и Джистарс, обеспечивая длительное непрерывное патрулирование в дежурном ре­
жиме. Кроме РЛС комплекс содержит тепловизор, телевизионную систему,
станции РТР и радиоразведки, в том числе сотовой связи, измеритель радиа­
ции. Дополнительными задачами комплекса являются метеонаблюдение и
ретрансляция.
Литература
1. Верба В. С. Тенденции развития авиационных средств разведки и дозора. - Наукоемкие тех­
нологии, 2004, № 8 - 9 .
2. Верба B.C., Гандурин В.А., Трофимов А.А. Бортовая РЛС для перспективного многофункцио­
нального авиационного комплекса разведки, оповещения и управления (МАК РОУ) с цифро­
вой АФАР. - Наукоемкие технологии, 2004, № 8 - 9.
3. Верба B.C., Мирошничен А.В., Морозов Ю.А. Выбор варианта бортовой РЛС с АФАР для
многофункционального авиационного комплекса разведки, оповещения и управления. - Ра­
диотехника, 2006, № 1.
4. Верба B.C., Гандурин В.А. Радиолокатор с синтезированной апертурой на высотном беспи­
лотном дирижабле. - Антенны, 2004, № 8 - 9.
5. Верба B.C., Гандурин В.А., Меркулов В.И. Живучесть авиационных комплексов радиолокаци­
онного дозора и наведения. - Информационно-измерительные и управляющие системы, 2008,
т.6, № 3.
6. Верба B.C. Актуальные вопросы создания многофункциональных радиотехнических ком­
плексов нового поколения. - Наукоемкие технологии, 2006, № 7 - 8.
7. Верба B.C. Перспективы развития систем и комплексов разведки, дозора и управления авиа­
ционного базирования и проблемы по обеспечению их создания. - Радиопромышленность,
2006, № 1 .
8. Верба B.C. Особенности формирования технического облика радиотехнических комплексов
многофункциональных информационно-управляющих средств воздушного базирования. Радиотехника, 2005, № 5.
9. Виноградов М.А. Перспективные комплексы воздушной радиолокационной разведки веду­
щих зарубежных стран. - Зарубежное военное обозрение, 2007, № 2 1 .
ГЛАВА 8
ТЕНДЕНЦИИ РАЗВИТИЯ СИСТЕМ КОМАНДНОГО УПРАВЛЕНИЯ
АВИАЦИОННЫХ КОМПЛЕКСОВ РАДИОЛОКАЦИОННОГО
ДОЗОРА И НАВЕДЕНИЯ
•
8.1. Основные направления совершенствования
методов наведения
В существующих АК РЛДН [2, 34] используется ограниченный набор ме­
тодов наведения, ориентированный только на наведение истребителей на неманеврирующие воздушные цели в дуэльной ситуации. В то же время методы
наведения, предназначенные для использования в АК РЛДН нового поколения,
должны удовлетворять существенно большему перечню разнородных и часто
противоречащих друг другу требований, отражающих необходимость наведе­
ния ЛА как на одиночные, так и на групповые воздушные и наземные цели, в
том числе и сверхманевренные и гиперзвуковые, в условиях воздействия
средств РЭП противоборствующей стороны. Кроме того, необходимо прини­
мать во внимание перспективу включения АК РЛДН в состав глобальной сетецентрической информационно-управляемой системы [5] с учетом экономиче­
ских и технологических факторов [13, 14].
В таких условиях использовать методы наведения, адекватно соответст­
вующие каждому конкретному типу целей и конкретным условиям их примене­
ния, с различным информационным обеспечением, нерационально. В то же вре­
мя использование единого универсального метода наведения, одинаково пригод­
ного для всех случаев, является весьма проблематичным. Наиболее рационально
использование нескольких методов наведения, каждый из которых обслуживает
достаточно большой набор целей в различных условиях их применения.
Целесообразно использование трех групп методов, один из которых обес­
печивает наведение на все типы воздушных целей, включая сверхманевренные
и гиперзвуковые; второй реализует наведение самолетов на наземные объекты,
включая и подвижные и малоразмерные. Третий тип способов наведения дол­
жен обеспечивать наведение средств поражения с ударных БЛА. Необходимо
отметить, что управление несколькими ЛА в варианте многопозиционного
наведения на воздушные и наземные объекты может быть получено на основе
первых двух групп методов. При этом координированное наведение несколь­
ких групп ЛА с одновременным выводом на одну цель может быть получено
как частный случай многопозиционного наведения.
Следует подчеркнуть, что проблема разработки перспективных методов
наведения имеет два аспекта: управленческий и информационный.
Первый из них связан с разработкой алгоритма траекторного управления,
реализующего возможности наведения определенных типов ЛА на определен­
ные типы цели в конкретных условиях.
Второй аспект связан с возможностью реализации алгоритмов оценива­
ния всех фазовых координат, используемых в алгоритмах наведения, в тех же
условиях применения, в том числе и в условиях радиопротиводействия.
В общем случае методы наведения должны обеспечивать:
1) минимум времени наведения;
2) максимальную дальность действия системы командного радиоуправления;
3) минимальные мгновенные перегрузки объекта управления;
4) минимальный расход энергии управляющих сигналов; практическую
реализуемость;
5) инвариантность системы радиоуправления к условиям применения
6) сопряжение с методами самонаведения, используемыми в дальнейших
этапах наведения ВЦ.
Для выполнения первых четырех требований траектория наведения
должна быть как можно более прямолинейной. Практическая реализуемость
подразумевает возможность формирования оценок всех требуемых фазовых
координат относительного и абсолютного движения цели и ОУ при сущест­
вующих измерителях, реальных объемах памяти и быстродействии бортовых
вычислителей и реальных расходах энергии на управление. Инвариантность
предусматривает возможность выполнения наведения во всем требуемом диа­
пазоне дальностей, скоростей и высот независимо от условий применения. При
этом наибольшее значение имеют всеракурсность перехвата и обеспечение вы­
сокой чувствительности метода к ошибкам управления как на больших, так и
на малых расстояниях при наведении и на малоподвижные и интенсивно ма­
неврирующие цели.
Большое значение имеет также сопряжение методов командного наведе­
ния и используемых в дальнейшем методов самонаведения, при котором обес­
печивается органичный (без существенных переходных процессов) переход
авиационной системы радиоуправления наводимых ЛА от этапа дальнего к
этапу ближнего наведения. Такое сопряжение в свою очередь обеспечивается
не только методами дальнего и ближнего наведения, но и типом визирной сис­
темы, используемой для поиска, обнаружения и автоматического сопровождения
целей, а также возможностями командной радиолинии управления (п. 5.5). От­
метим, что наибольшую вероятность выполнения дальнего наведения обеспе-
чивают радиолокационные визирные системы. Кроме того, при прочих равных
условиях БРЛС обеспечивает в любых метеоусловиях наибольшую дальность
захвата цели на автосопровождение, предопределяя тем самым наименее жест­
кие требования к продолжительности функционирования радиоэлектронной
системы управления на этапе самонаведения.
Проблема сопряжения методов управления, используемых на этапах даль­
него и ближнего наведения, становится более актуальной в связи с перспекти­
вой смешанного управления, подразумевающего совместное использование
методов командного наведения и самонаведения. В рамках этой концепции в
основе этих методов должны лежать одни и те же закономерности, требующие
одинакового информационного обеспечения и отличающегося только конеч­
ным представлением параметра рассогласования.
Еще одной особенностью перспективных методов наведения является их
согласование с перечнем и дискретностью передачи управляющих сигналов
командной радиолинией управления. В существующих КРУ управляющие сиг­
налы традиционно передаются в виде требуемых значений курса ψ, высоты Η и
скорости V [2]. Однако потребности наведения на сверхманевренные и гипер­
звуковые летательные аппараты предопределяют и необходимость передачи
ряда дополнительных фазовых координат, в том числе и производных дально­
сти, высоты и скорости.
Кроме того, при наведении на эти типы ЛА требуются существенно мень­
шие временные интервалы передачи команд, что обусловливает использование
в БРЛС АК РЛДН фазированной антенной решетки и увеличение пропускной
способности КРУ.
В перечне ограничений, налагаемых информационными системами на
возможности методов наведения обеспечивать всеракурсный перехват, одно из
важнейших мест занимает наличие зон доплеровской режекции [16]. Наличие
этих зон, обусловленных доплеровским принципом построения бортовых РЛС,
приводит к потере информации о целях или наводимых ЛА, движущихся на
ракурсах, близких к четырем четвертям (90°) к линии визирования.
Радикальных средств снижения отрицательного влияния зон режекции на
информационные возможности АК РЛДН до настоящего времени не найдено.
Наиболее приемлемым способом снижения этого недостатка является одно­
временное использование нескольких АК РЛДН в рамках единой многопози­
ционной информационно-управляющей системы.
Еще одним очень серьезным ограничением, налагаемым информационны­
ми системами на используемые методы наведения, является применение про­
тивником средств радиоэлектронного подавления, применение которых приво­
дит к потере информации, поступающей от БРЛС. Следует подчеркнуть, что
снижение влияния радиопротиводействия противника может быть достигнуто
за счет как повышения эффективности средств помехозащиты, так и за счет
специальных методов наведения с повышенной скрытностью [17], суть некото­
рых из них изложена в п.8.2.
Способы получения алгоритмов траекторного управления, удовлетворяю­
щих изложенным выше требованиям, могут быть различными. Из них наиболее
предпочтительными являются способы, одновременно наилучшие по точности
и экономичности, обеспечивающие минимум квадратичных функционалов ка­
чества, в которых учитываются и ошибки управления, и затраты энергии на его
осуществление. Эта задача решается при использовании математического ап­
парата статической теории оптимального управления (СТОУ) [33, 34]. В про­
стейшем случае аппарат СТОУ для системы
(8.1)
предназначенной для отработки процесса
(8.2)
при наличии измерений
(8.3)
позволяет сформировать сигнал управления
(8.4)
оптимальный по минимуму локального функционала качества
(8:5)
- n-мерные векторы требуемых и управляемых ко­
ординат; F
и FT - динамические матрицы, учитывающие внутренние связи
процессов (8.1) и (8.2); Ву - матрица эффективности r-мерного (г<п) вектора
сигналов управления и; ζ — m-мерный (m < 2п) вектор измерения; Η - модуля­
ционная матрица связи обобщенного вектора состояния
и измере­
ний; Q и К - матрицы штрафов за точность функционирования и величину
сигналов управления;
- векторы оптимальных оценок процессов (8.1)
и (8.2); Μ - математическое ожидание функционала (8.5) при условии, что
имеются измерения (8.3).
Следует подчеркнуть, что в зависимости от выбранных моделей (8.1)-(8.3)
и функционала качества (8.5) могут быть получены различные варианты мето­
дов наведения.
8.2. Способы повышения скрытности методов
наведения
Спецификой работы АК РЛДН является чрезвычайная насыщенность раз­
личного рода радиоизлучающими средствами, демаскирующими его работу. В
связи с этим повышение скрытности функционирования является настоятель­
ной необходимостью дальнейшего повышения его боевой эффективности и
живучести [11].
В общем случае под скрытным наведением понимают процесс вывода ле­
тательного аппарата в область применения оружия со значительно сниженной
вероятностью регистрации факта излучения его бортовой РЛС.
В приложении к АК РЛДН решение проблемы скрытного наведения
содержит несколько направлений:
1) связано с обеспечением скрытности работы информационных систем
самого АК РЛДН;
2) связано с повышением скрытности и имитостойкости передаваемых ко­
манд;
3) характеризуется повышением скрытности самого процесса наведения
летательных аппаратов.
Ниже основное внимание будет уделено первому и третьему направлени­
ям. В основе этих направлений лежит уменьшение времени работы РЛС наво­
димых самолетов и АК РЛДН на излучение.
Наиболее простым вариантом уменьшения времени работы РЛС управ­
ляемых объектов на излучение является прием, суть которого состоит в их
выводе не на рубеж захвата целей бортовыми локаторами, а непосредственно
в область применения оружия (рис. 8.1). В такой ситуации управляемый объ-
Рис. 8.1
ект становится лишь неизлучающим средством доставки ракет в область пуска.
Конечным этапом этого приема является выдача команд целеуказания ракетам
непосредственно с АК РЛДН либо после включения РЛС самолета-доставщика
на очень короткое время, достаточное лишь для формирования этих команд [17].
Предпосылками реализации этого способа являются увеличенная даль­
ность действия РЛС АК РЛДН и ее способность обращаться к цели с малым
временным интервалом за счет использования ФАР, а также большие зоны за­
хвата цели по угловым координатам современных радиолокационных головок
самонаведения [2].
Рассмотренный прием имеет еще одно достоинство: он позволяет расши­
рить поле условий применения ракет дальнего боя для вариантов, когда даль­
ность их пуска превышает дальность захвата цели бортовыми РЛС истребителя
[24]. Необходимо, однако, подчеркнуть, что для обеспечения дальнего пуска
ракет необходимо знать тип ракеты, формировать на АК РЛДН команду, по ко­
торой начинается ее подготовка к пуску, и рассчитывать условия формирова­
ния команды «пуск разрешен»:
где
соответственно дальность до цели от наводимого са­
молета, максимально и минимально разрешенные дальности пуска; φΓ и φ Β бортовые пеленги целей в горизонтальной и вертикальной плоскостях с наво­
димого истребителя.
Дальнейшим развитием этого приема является передача на пущенную ра­
кету команд радиокоррекции (РК) непосредственно с АК РЛДН (рис. 8.1). Для
решения последней задачи необходимо согласование частотных диапазонов
работы РЛС АК РЛДН и радиолокационных головок самонаведения ракет.
Другой прием скрытного наведения основан на использовании полуактив­
ного режима, суть которого состоит в том, что АК РЛДН облучает цель, а РЛС
управляемого самолета работает в режиме приема вплоть до точки пуска раке­
ты (рис. 8.2) и по возможности с формированием команд радиокоррекции. Не­
достатком этого приема является необходимость согласования частотных диа­
пазонов РЛС АК РЛДН и РЛС наводимого самолета.
Более сложной разновидностью этого способа, позволяющей избежать со­
гласования частотных диапазонов, является использование двух АК РЛДН,
один из которых на большой дальности облучает цель, а второй, принимая от­
раженный от нее сигнал, оценивает все необходимые фазовые координаты и
формирует команды наведения для управляемого самолета, движущегося в ре­
жиме радиомолчания вплоть до пуска ракет по этой цели (рис. 8.3).
Рис. 8.2
Рис. 8.3
Достоинством полуактивного способа является возможность выполнения
скрытного всеракурсного наведения самолетов на любые типы радиоконтраст­
ных целей. Недостатки - сложности синхронизации излучающей и приемной
систем, необходимость согласования плоскостей поляризации передающей и
приемной антенн, усложнения алгоритмов обработки сигналов на приемной
стороне и уязвимость от средств функционального поражения [15].
Еще один вариант повышения скрытности ударного самолета — ис­
пользование для наведения на одну цель двух истребителей. В такой ситуации
один из них (И1, рис. 8.4) выводится по командам АК РЛДН на рубеж захват*
цели его бортовой РЛС по одному из известных алгоритмов. В это время вто­
рой истребитель (И2) выполняет полуактивное самонаведение на цель по сиг­
налам, излученным И1 и отраженным от цели. При этом сигналы радиокоррек­
ции для ракет целесообразно формировать на первом истребителе. В рамка?
такого способа второй истребитель используется лишь как средство достави
оружия в область его применения. Достоинством такого приема является воз­
можность избежать необходимости согласования частот сигналов, используе
мых в АК РЛДН и истребителях.
И2
Рис. 8.4
Наиболее скрытным вариантом является использование пассивных режи­
мов работы с применением станций радиотехнической разведки и бортовоъ
РЛС при работе по радиоизлучающим целям (рис. 8.5).
Достоинством такого режима является отсутствие демаскирующего излу­
чения БРЛС АК РЛДН, основными недостатками - ограничение класса пора­
жаемых целей радиоизлучающими объектами и возможность наведения на нш
истребителей только в заднюю полусферу на основе разновидностей методг
погони [31]. Диапазон возможных ракурсов перехвата может быть расширен з<
счет использования метода последовательных упреждений [34], при которое
параметр рассогласования в горизонтальной плоскости для управляемого JLA
формируется по правилу
(8.6;
где
- бортовой пеленг и угловая скорость линии визирования цели с
наводимого самолета; К
и Κω - весовые коэффициенты.
Рис. 8.5
Для реализации всеракурсных методов наведения необходимо иметь
оценки дальности и скорости сближения. В пассивном режиме они могут быть
получены на основе угломерных данных лишь в результате достаточно дли­
тельного маневрирования носителя [23] либо в процессе совместной работы в
пассивном режиме двух АК РЛДН (рис. 8.6).
В последнем случае оценки дальности и скорости могут быть сформиро­
ваны практически мгновенно. Кроме того, выбором траекторий полета носите­
лей АК РЛДН можно минимизировать ошибки оценивания [22] местоположе­
ния цели и, соответственно, повысить точность наведения.
При использовании двухпозиционного режима работы двух АК РЛДН по­
ражение радиоизлучающей цели может быть осуществлено двумя способами.
Один из них основан на использовании обычных ракет «воздух-воздух», пора­
жающих источник радиоизлучения как обычную цель. Второй, основанный на
использовании противорадиолокационных ракет, потребует некоторой модер­
низации ракет этого типа, обеспечивающей упреждающий перехват движу­
щихся объектов.
Более простой разновидностью двухпозиционного варианта перехвата
излучающих подвижных целей является использование совместной работы на
прием излучения АК РЛДН и истребителя с дальнейшим выводом его в точку
пуска ракеты (рис. 8.5). Примеры алгоритмов траекторного управления в рам­
ках двухпозиционной системы наведения на подвижные источники радиоизлу­
чения рассмотрены в п. 8.4.
Рис. 8.6
При наведении большого числа самолетов практически невозможно реа­
лизовать малые времена обращения к лоцируемым объектам даже при наличии
ФАР. В связи с этим весьма перспективно использование режимов комбиниро­
ванного информационного обеспечения процессов наведения (комбинированно­
го управления) совместно РЛС АК РЛДН и РЛС наводимого самолета.
В этом режиме с борта АК РЛДН функциональные команды поступают
на наводимый самолет с большими интервалами времени, превышающими
время существования сложных гипотез движения целей. Для снижения этого
недостатка в промежутках между поступлениями команд от АК РЛДН крат­
ковременно включают на излучение РЛС наводимого самолета, формируя на
нем те же требуемые значения параметров полета. Такой подход позволяет в
значительной мере снизить ошибки наведения при достаточно высокой его
скрытности.
В заключение необходимо отметить, что использование рассмотренных
приемов наведения с повышенной скрытностью требует более совершенных
алгоритмов траекторного управления и более тесных информационных связей
АК РЛДН и наводимых летательных аппаратов. При этом все рассмотренные
способы могут быть использованы и для наведения на наземные объекты.
8.3. Методы наведения на наземные объекты
Методы наведения ЛА на наземные цели с использованием АК РЛДН
должны в общем случае обеспечивать вывод объекта управления на заданное
расстояние под заданным углом и с требуемой угловой скоростью линии визи­
рования, значения которых зависят от вида применяемых средств поражения
(СП) в условиях реальных ограничений на перегрузки и угловые скорости. Не­
обходимо отметить, что наибольший набор способов наведения реализуется
при использовании бортовой радиолокационной станции землеобзора [1] в ка­
честве основного датчика информации.
Процесс наведения ОУ на наземные в общем случае движущиеся цели при
использовании АК РЛДН осуществляется при выполнении следующих условий:
на борту АК РЛДН необходимо иметь информацию о значениях абсолют­
ных и относительных координат ОУ и наземной цели;
наведение ЛА в горизонтальной плоскости осуществляется по курсу ψ пу­
тем передачи требуемого значения ψτ с АК РЛДН на ОУ и отработки пилотом
или системой автоматического управления параметра рассогласования
Δψ = ψ - ψ τ ;
БРЛС ОУ функционирует в пассивном режиме, а при необходимости мо­
жет периодически кратковременно работать в активном режиме, реализуя ком­
бинированное управление;
информация о требуемом значении курса поступает с интервалами Т, обу­
словленными функционированием БРЛС АК РЛДН в режиме сканирования
всего воздушного пространства и взаимодействия с другими ОУ.
Используемый алгоритм траекторного управления ОУ должен быть пол­
ностью совместим с методами самонаведения ОУ во избежание ошибок фор­
мирования параметра рассогласования, которые могут возникнуть при перехо­
де на самонаведение и тем самым влиять на его точность.
Необходимо отметить, что использование АК РЛДН позволяет реализо­
вать методы наведения ОУ на наземные цели с повышенной скрытностью, осо­
бенности которых рассмотрены в п. 8.2.
В то же время, наличие достаточно большого интервала поступления ин­
формации от АК РЛДН на ОУ приводит к появлению ошибок наведения, что
предопределяет необходимость повышения точности наведения за счет исполь­
зования собственных информационных датчиков наводимого ЛА для коррек­
ции траектории движения при наведении на наземную цель.
При использовании БРЛС АК РЛДН в качестве основного датчика инфор­
мации для реализации методов наведения ОУ на наземные цели могут приме­
няться режим обычного луча, в котором обеспечивается наихудшая деталь­
ность изображения; режим доплеровского обужения луча (ДОЛ), в котором
обеспечивается лучшая детальность изображения, и режим фокусированного
синтезирования апертуры (ФСА) антенны, в котором обеспечивается наивыс
шая детальность изображения с линейным разрешением до единиц метров.
Вследствие этого на практике приходится применять различный набор ме
тодов наведения, отличающихся друг от друга различными траекториями поле
та и использованием различного набора датчиков. Необходимо отметить, чт
при переходе от одного метода наведения к другому возникают переходны
процессы, особенно нежелательные перед применением оружия.
В связи с этим возникает необходимость разработки универсального ме
тода наведения, одинаково пригодного при использовании на борту ОУ раз
личных режимов БРЛС.
8.3.1. Оптимизация метода командного наведения
летательных аппаратов на наземные цели
Анализ базовых методов наведения летательных аппаратов различных ти
пов в приложении к решению задач наведения на наземные цели позволяв
прийти к следующим заключениям.
Применение для наведения самолетов и ракет «в-п» большой дальносп
метода пропорционального наведения, основанного на учете угловой скоросп
линии визирования (ЛВ), не оправдывает себя из-за плохой управляемости н;
начальных участках траектории, особенно при боковом ветре, и наличия на
чальных ошибок наведения.
Прямой метод наведения, использующий угловые ошибки управления
также нецелесообразен из-за низкой точности наведения на конечном участк
вследствие влияния ветра, что особенно проявляется при наведении на под
вижные надводные и наземные цели. В связи с этим желательно использоват
алгоритм траекторного управления, в котором учитываются как ошибки на
ведения по углу, так и угловая скорость ЛВ. Такой закон будет одинаково эф
фективным как на больших, так и на малых расстояниях до цели.
Для решения этой задачи применяют математический аппарат статистиче
ской теории оптимального управления, один из наиболее простых варианте]
которого приведен в п. 8.1 [32].
Полагая каналы управления независимыми, задачу определения алгорит
ма наведения ЛА в горизонтальной плоскости, совместно наилучшего по точ
ности и по экономичности, можно сформулировать следующим образом.
Для объекта управления, угловое положение которого относительно на
земной цели, движущейся с постоянной скоростью, определяется системо]
уравнений [29]
(8.7
(8.8)
необходимо найти требуемый сигнал управления jVr, оптимальный по миниму­
му функционала качества
(8.9)
В (8.7)-(8.9) (рг и φΓΤ - бортовой пеленг цели и его требуемое значение;
и
- центрированные гауссовские возмущения, характеризующие флуктуа­
ции бортового пеленга и угловой скорости ωΓ линии визирования; Д и Д дальность до цели и скорость сближения с ней; q9 и qa - штрафы за точность
управления; kj - штраф за величину сигнала управления j r , под которым пони­
мается боковое ускорение ОУ.
Следует отметить, что соотношение (8.8) является разновидностью клас­
сического кинематического уравнения [34] для случая, когда боковое ускоре­
ние цели равно нулю. Такая ситуация справедлива как для неподвижной цели,
так и для малоподвижной цели, движущейся с постоянной скоростью. Смысл
введенных обозначений поясняет рис. 8.7, где для горизонтальной плоскости в
невращающейся земной системе координат показаны точки расположения цели
Оц и объекта управления Ооу; векторы требуемой Уоут и фактической Voy ско­
ростей ЛА. Необходимо отметить, что при наличии ветра, направление и ско­
рость которого характеризуются вектором VB, полет к цели по прямой 0 о у О ц
возможен в том случае, если требуемый бортовой пеленг фгт будет равен углу
сноса φγ. Вполне очевидно, что при полете ОУ к цели по линии О оу О ц (под
Рис. 8.7
углом φ ΓΤ = cpy ) угловая скорость линии визирования будет равна нулю, т. е.
ωΓΤ = 0. В такой ситуации текущий промах [29]
•
(8.10)
где VOT - модуль относительной скорости. Данное обстоятельство поясняет
способность функционала (8.9) учитывать требования точности наведения.
Поставив в соответствие (8.7)-(8.9) и (8.1), (8.2), (8.5), получим
(8.11)
Подставив (8.11) в (8.4), найдем закон изменения требуемого бокового ус­
корения ОУ:
(8.12)
Тогда алгоритм траекторного управления ЛА при наведении на наземную
цель описывается соотношением
(8.13)
Метод командного наведения совместно с законом (8.12) может быть
получен с учетом связи
(8.14)
между поперечным ускорением j r , курсом ψ и собственной скоростью ОУ.
Подставляя (8.14) в (8.12), получим
(8.15)
где
(8.16)
(8.17)
Принимая во внимание, что требуемые значения курса ψτ передаются на
ОУ достаточно редко с периодом Τ , преобразуем (8.15) в разностное уравне­
ние для дискретного времени:
Отсюда следует, что требуемый курс ψ τ , передаваемый на борт управ­
ляемого ЛА при командном наведении, определяется соотношением
(8.18)
Анализ (8.12), (8.18) позволяет сделать следующие заключения.
Полученные методы наведения являются частным случаем метода после­
довательных упреждений (8.6) и отличаются от него нестационарным характе­
ром коэффициентов, учитывающих в требуемом законе наведения веса ошибок
управления
. При этом на больших расстояниях до цели, когда Д
велика и
закон (8.18) вырождается в разновидность прямого метода,
называемую иногда путевым методом. Причем, чем меньше скорость Д, тем
сильнее действие ветра и влияние ошибки
на сигнал управления. При
неизменной скорости полета значение весового коэффициента
(8.16), учи­
тывающего влияние ошибки по углу
остается неизменным. В то же
время по мере уменьшения дальности Д возрастает влияние второго компо­
нента Κω (8.17) сигнала управления. Это возрастание, обусловленное не толь­
ко увеличением ωΓ с уменьшением дальности, но и увеличением весового
множителя
, становится особенно значительным на малых расстояниях
до цели. Следовательно, в процессе полета по мере приближения к цели в зако­
не управления происходит перераспределение влияния ошибок управления от
Фгт ~~ Фг на начальных участках в пользу ошибки по ωΓ на конечных участках
траектории, обеспечивающей минимизацию промаха (8.10).
Синтезированный алгоритм наведения, реализуя минимум функционала
качества (8.9), позволяет получить систему наведения, совместно наилучшую
как по точности управления, так и по экономичности.
Сигнал управления зависит не от абсолютных значений коэффициентов
штрафов ς φ , ςω и kj, а от их отношений
их выбор. Отношения
должны быть такими, чтобы при максимально
возможных значениях ошибок управления
значений
, что существенно облегчает
для минимальных
и Д требуемые поперечные перегрузки не превышали допусти­
мые значения.
В состав ИУС АК РЛДН, реализующей алгоритм управления (8.18), долж­
ны входить устройства формирования оценок дальности Д от ОУ до цели, ско­
рости Д его сближения с ней, требуемого угла упреждения φΓΤ, бортового пе­
ленга φΓ, угловой скорости ωΓ JIB с ОУ и скорости Voy .ОУ. При этом оценки
ф г т могут принимать различные значения, определяемые режимами работы
бортовых РЛС и типом используемого оружия.
Необходимо отметить хорошее согласование метода командного наведе­
ния (8.18) с методом самонаведения (8.12), используемым на ОУ, что дает воз­
можность реализовать смешанное управление. Его суть состоит в том, что в
промежутках между поступлениями команд управления
бортовая РЛС ОУ включается на очень короткое время, достаточное для полу­
чения 2-3 тактов высокоточных измерений (десятые доли секунды), дающих
возможность при использовании (8.12) скорректировать погрешности наведе­
ния, определяемые ошибками формирования требуемого курса ψ τ .
В заключение следует подчеркнуть, что расчет требуемого курса по
(8.15)-(8.18) дает возможность передавать на борт ЛА не только значения
ψτ (к), но и значения его производной
. Это позволяет реализовать на
борту управляемого ЛА формирование текущего требуемого курса по правилу
(8.19)
в котором
Такой прием обеспечивает более высокую точность наведения ЛА, чем
при использовании только дискретных значений ψτ (k), особенно при выклю­
ченной БРЛС наводимого объекта.
8.3.2. Оптимизация алгоритмов наведения на малоразмерные
наземные цели при использовании активного
синтезирования апертуры антенны
Одним из способов улучшения разрешающей способности РЛС ЛА, приме­
няемых при наведении на малоразмерные наземные цели (МНЦ), является ис­
пользование синтезирования апертуры (СА) антенны или доплеровского обужения луча [27]. Однако желаемый эффект улучшения линейного разрешения по
азимуту при использовании СА или ДОЛ достигается лишь в том случае, если
ЛА движется под достаточно большим углом к линии визирования МНЦ, в то
время как для ее поражения линия пути ЛА должна совпадать с ЛВ. В связи с
этим алгоритмы траекторного управления должны одновременно удовлетворять
противоречивым требованиям к заданному линейному разрешению и линейному
промаху. Такие алгоритмы должны обеспечивать полет ЛА по криволинейной
траектории, при которой на начальном участке при полете под некоторым углом
к ЛВ реализуется требуемое линейное разрешение по азимуту, а на конечном доворот, позволяющий получить высокоточное наведение на МНЦ.
Необходимо отметить, что при полете по криволинейной траектории возрас­
тает расход энергии, затрачиваемой на управление ЛА, в связи с чем актуальной
становится задача улучшения экономичности закона наведения. Удовлетворить
противоречащим друг другу требованиям обеспечения высокой разрешающей
способности, точности и экономичности наведения в условиях реальных ограни­
чений на располагаемые поперечные перегрузки при использовании традицион­
ных методов наведения [29] невозможно. Следует подчеркнуть, что поочередное
эмпирическое использование на различных участках траектории различных мето­
дов наведения не позволяет получить приемлемых результатов из-за трудности
определения момента перехода с одного закона на другой, возникновения значи­
тельных переходных процессов и сложности обеспечения экономичности.
Весьма перспективным направлением синтеза сложных законов наведения,
наилучших по противоречивым требованиям точности, разрешающей способно­
сти и экономичности, является использование математического аппарата СТОУ.
Ниже будут использованы простейшие алгоритмы этой теории, рассмот­
ренные в п.8.1. Необходимо подчеркнуть, что в приложении к АК РЛДН проце­
дуры синтезирования могут использоваться в двух вариантах. Первый из них ос­
нован на использовании алгоритмов траекторного управления, обеспечивающих
стабильное высокое разрешение на самом АК РЛДН. Целесообразность специ­
ального управления обусловлена тем, что при обычном переднебоковом обзоре
интересующего участка местности с полетом по прямой линии изменяется ли­
нейное разрешение по азимуту, что приводит к ухудшению детальности радио­
локационного изображении. Второй вариант обеспечивает вывод наводимого ЛА
на траекторию, при которой на нем после включения БРЛС обеспечивается син­
тезирование со стабильным линейным разрешением по азимуту.
В связи с этим на первом этапе будет приведен алгоритм траекторного
управления самолетом-носителем АК РЛДН, обеспечивающий на нем синтези­
рование апертуры с постоянным линейным разрешением, а на втором этапе - ал­
горитмы траекторного управления, обеспечивающие вывод наводимого ЛА на
траекторию, при полете по которой на нем после включения БРЛС будет реали­
зован режим синтезирования с постоянным линейным разрешением по азимуту.
Синтез выполняется при условии, что соблюдаются следующие допущения:
1) известны значения требуемой линейной разрешающей способности по
азимуту, длины волны и полосы пропускания доплеровского фильтра;
2) наземная цель движется в произвольном направлении с постоянной
скоростью, величина которой существенно меньше скорости полета самолета;
3) известны диапазон
располагаемых перегрузок ЛА, максимально до­
пустимая угловая скорость ωΛ0Π линии визирования и минимально допустимый
при синтезировании бортовой пеленг
цели;
4) на борту ЛА имеются достаточно точные измерители дальности до на­
земной цели и скорости сближения с ней;
5) известен допустимый промах, текущее значение которого определяется
соотношением (8.10);
6) канал наведения ЛА в вертикальной плоскости практически не влияет
на канал управления в горизонтальной плоскости.
Последнее допущение позволяет осуществлять независимый синтез управ­
ления в горизонтальной и вертикальной плоскостях. При этом наибольшую
сложность представляет синтез закона наведения в горизонтальной плоскости,
для которой и выполнены все необходимые математические выкладки.
Выбор исходных моделей состояния для синтеза алгоритма траекторного
управления в горизонтальной плоскости осуществляется с учетом назначения
системы, возможности измерения используемых фазовых координат и их свя­
зей с требованиями, предъявляемыми к системе.
Использование аппарата СТОУ предполагает знание моделей управляемо­
го (8.1) и требуемого (8.2) процессов.
Для определения закона изменения хт в приложении к решаемой задаче
рассмотрим зависимость линейного разрешения БРЛС по азимуту от взаимного
расположения цели и наводимого объекта.
Пусть на ЛА, находящемся в точке ОДА на удалении Д от цели Оц и дви­
жущемся со скоростью У Л А под углом φΓ к ней (рис. 8.8), формируется сигнал
подсвета цели с длиной волны λ, который после отражения от цели принимает­
ся на объекте управления. Тогда доплеровская частота отраженного сигнала
определяется соотношением
(8.20)
а частота сигнала, отраженного от точки ОЦР, отстоящей от Оц на расстояние
Δ1Τ, равное требуемому линейному разрешению по азимуту, может быть рас­
считана по формуле
(8.21)
Рис. 8.8
Следует подчеркнуть, что в зависимости от точности аппроксимации мо­
гут быть получены различные формулы, связывающие между собой требуемое
разрешение Δίχ с условиями применения ЛА, определяемые конкретными зна­
чениями УДА, фг, Д. Ниже будет рассмотрен наиболее простой случай, который
базируется на аппроксимации (8.21) рядом Тейлора в линейном приближении.
При таких условиях
где было учтено равенство (8.20).
Для того чтобы разрешить точки Оц и Оцр, полоса пропускания доплеровского фильтра в приемнике БРЛС ЛА не должна превышать величины
(8.22)
или
(8.23)
где
(8.24)
- угловая скорость ЛВ цели.
Из (8.22), (8.23) можно получить
(8.25)
(8.26)
Отсюда следует, что для реализации требуемого разрешения Δ/τ траекто­
рия движения ЛА должна быть такой, чтобы бортовой пеленг цели удовлетво­
рял условию
(8.27)
Анализ (8.27) позволяет прийти к следующим заключениям.
Бортовой пеленг φΓΤ, необходимый для реализации требуемого линейного
разрешения Δ1τ по азимуту, зависит как от параметров системы обработки сиг­
налов AF, λ, так и от условий применения Д и УЛд·
При прочих равных условиях для обеспечения более высокого линейного
разрешения по азимуту необходимо более сильное искривление траектории
полета ЛА, характеризуемое большими значениями срг. При этом наилучшее
разрешение будет обеспечиваться при боковом обзоре (
=90°), когда цель
находится на траверсе.
В общем случае рассматриваемая система наведения предназначена для
стабилизации линейного разрешения по азимуту, обеспечиваемого выбором
бортового пеленга (8.27), высокоточного вывода ЛА на цель, обеспечивающего
минимизацию промаха (8.10) при условии
(8.28)
и минимизации расхода энергии управляющих сигналов.
В связи с этим в состав модели состояния должны, как минимум, входить φΓ
и ωΓ. Геометрические соотношения между координатами абсолютного и относи­
тельного движения наземной цели и ЛА в горизонтальной плоскости приведе­
ны на рис. 8.9.
Рис. 8.9
На этом рисунке в земной невращающейся системе координат ΧΟΥ пока­
зано текущее расположение ЛА ОДА И цели Оц. Вектор Уц характеризует ско­
рость и направление движения цели, а УЛдт и УЛд - требуемый и фактический
векторы скорости ЛА; φΓτ - требуемое значение бортового пеленга, при котором
обеспечивается заданное разрешение
- поперечное ускорение ЛА;
8г - угол визирования цели.
Из рисунка видно, что геометрические связи абсолютных и относитель­
ных фазовых координат соответствуют модели (8.7) и (8.8). Необходимо
отметить, что и φΓ и а>г достаточно просто оцениваются существующими из­
мерителями.
Функционал качества (8.5), оценивающий эффективность закона наведе­
ния, должен учитывать ошибки сргт—фг управления по бортовому пеленгу, ис­
пользуемые для стабилизации линейного разрешения (8.25) по азимуту; ошиб­
ки ωΓτ—ωΓ управления по угловой скорости визирования, по которым можно
оценить величину текущего промаха, и расход энергии сигналов управления j r .
С учетом этих особенностей минимизируемый функционал может быть полу­
чен в виде соотношения
(8.29)
в котором ςφ и qro - штрафы за точность управления по углу и угловой скоро­
сти; kj - штраф за значение сигнала управления.
Сопоставив (8.29) с (8.5), а (8.7), (8.8) с (8.1), будем иметь
Используя эти соотношения, получим закон наведения:
(8.30)
где
(8.31)
определяется из (8.25). Тогда алгоритм траекторного управления ЛА при наве­
дении на наземную цель описывается соотношением
(8.32)
Поскольку сам АК РЛДН выполняет только информационную роль и не
приспособлен для непосредственного уничтожения наземных объектов, то для
него не требуется вывода на цель. В связи с этим для АК РЛДН значения ωπ
определяются по правилу
(8.33)
вытекающему из соотношения (8.26). При этом бортовая РЛС АК РЛДН долж­
на формировать оценки дальности до цели и скорости сближения с ней, борто­
вого пеленга цели и угловой скорости линии ее визирования.
Необходимо подчеркнуть, что полет АК РЛДН по криволинейной траек­
тории, определяемой алгоритмом траекторного управления (8.32), (8.33), обес­
печивает стабилизацию линейного разрешения и, соответственно, стабильность
радиолокационной карты и более высокую достоверность распознавания на­
земной обстановки.
Изменения относительных фазовых координат системы (8.7), (8.8) при ис­
пользовании закона наведения (8.32) иллюстрируют эпюры, приведенные на
рис. 8.10-8.14, а возможный вид траектории в горизонтальной плоскости - на
рис. 8.15. На этих рисунках Дп - дальность начала управления;
максимальные значения бортового пеленга, угловой скорости ЛВ и поперечно­
го ускорения; Δ/τ - требуемое линейное разрешение по азимуту.
Исследования полученного алгоритма показали, что он позволяет обеспе­
чить стабилизацию требуемого линейного разрешения (рис. 8.14).
При выводе с АК РЛДН самолета на наземную малоразмерную цель с по­
следующим синтезированием на нем апертуры антенны необходимо переда­
вать на него соответствующие команды по курсу ψ τ .
Используя методику, рассмотренную в п.8.3.1, с учетом связи
получим
(8.34)
(8.35)
где
определяются соотношениями (8.16), (8.17).
Для реализации (8.34) на борту АК РЛДН необходимо иметь устройства
(алгоритмы) оценивания дальности от наводимого ЛА до цели, скорости его
сближения с целью, бортового пеленга, угловой скорости линии визирования
ЛА-цель и его собственной скорости. Такой состав измерителей не налагает
никаких ограничений на практическую реализуемость метода. В остальном
свойства этого алгоритма соответствуют рассмотренному в п.8.3.1.
Следует отметить, что при использовании других моделей состояния мо­
гут быть получены другие алгоритмы траекторного управления.
Рис. 8.10
Рис. 8.11
Рис. 8.12
Рис. 8.13
Рис. 8.14
Рис. 8.15
8.4. Управление летательными аппаратами
в многопозиционных системах наведения
Многопозиционные системы наведения представляют собой совокупность
функционально связанных систем наведения нескольких пространственно раз­
несенных объектов управления, радиолокационные датчики которых образуют
единую многопозиционную радиолокационную систему [43]. Отличительной
особенностью этих систем являются более высокие информационные возмож­
ности [8] и повышенная живучесть [11].
Многопозиционные системы воздушно-наземного и воздушного базирова­
ния [26] состоят из многопозиционной системы информационного обеспечения,
центра сбора, обработки информации и управления и системы многоканального
наведения средств поражения. Многопозщионные системы наведения обладают
существенными преимуществами по отношению как к однопозиционным сис­
темам наведения, так и к их совокупности, не объединенной в единую систему.
Эти преимущества обусловлены прежде всего возможностью использования
дополнительной информации, заключенной в пространственной структуре
электромагнитного поля. Применение многопозиционных систем наведения
позволяет в комплексе решить ряд проблем повышения живучести, помехоза­
щищенности и точности наведения, маневрирования информационными ресур­
сами и средствами поражения. Однако имея большие преимущества, МПСН
требуют существенного усложнения алгоритмов обработки информации и
управления [40], обусловленного появлением в системе наведения еще одного,
более высокого иерархического уровня. Среди задач, решаемых на этом уров­
не, ключевыми являются алгоритмы целенаправленного управления простран­
ственным положением отдельных позиций, управления информационными по­
токами между ними, целераспределения и выбора средств поражения.
Следует иметь в виду, что целенаправленное управление местоположени­
ем позиций дает возможность не только решать задачи перехвата воздушных и
уничтожения наземных целей, но и обеспечивать при этом наилучшие условия
для осуществления радиолокационных измерений, реализуя концепцию траекторного управления наблюдением [20].
Необходимость рассмотрения вопросов, относящихся к траекторному
управлению наблюдением с использованием АК РЛДН, объясняется тем, что в
этих системах общая задача уничтожения целей и задача информационного
обеспечения этого процесса могут решаться различными позициями. В связи с
этим летательные аппараты, непосредственно осуществляющие атаку цели,
часто называют ударными (ударными позициями), а летательные аппараты,
используемые для улучшения условий радиолокационного наблюдения, — пози­
циями информационного обеспечения (информационной поддержки).
Отличительной особенностью многопозиционных систем по сравнению с
однопозиционными системами является невозможность получения оценок ко­
ординат и параметров движения цели, необходимых для организации наведе­
ния ударных ЛА, по информации о цели, получаемой только на одной измери­
тельной позиции.
Наиболее простыми из многопозиционных систем оказываются двухпозиционные системы. К ним относятся системы, основанные на угломерных
(триангуляционных) методах определения местоположения целей из двух то­
чек пространства [21], а также системы, использующие полу активное синтези­
рование апертуры на ударном ЛА и активное синтезирование на ЛА информа­
ционного обеспечения.
В общем случае объединение информации для решения задач управления
позициями может осуществляться различными способами: на уровне первичной
обработки в процессе обмена высокочастотными сигналами, когда вся МПСН
рассматривается как единая разреженная антенная решетка; на уровне вторичной
обработки, когда позиции обмениваются оценками фазовых координат, сформи­
рованных на отдельных позициях; и на уровне третичной обработки, когда ин­
формация используется для решения задач целераспределения и выбора оружия.
Управление информационными потоками подразумевает распределение
позиций на ударные и информационной поддержки с соответствующим изме­
нением алгоритмов траекторного управления ими и их информационного обес­
печения. Весьма важной процедурой управления информационными потоками
является выбор режимов излучения и приема, позволяющий в зависимости от
обстановки использовать активные, полуактивные и пассивные режимы работы
радиолокационных систем с соответствующей синхронизацией аппаратуры на
отдельных позициях при выборе состава и алгоритмов функционирования из­
мерителей.
Задача целераспределения сводится к ранжированию целей по степени
опасности и благоприятствования для атаки по различным критериям и рас­
пределения этих целей по отдельным группам позиций с дальнейшим разделе­
нием их на ударные и информационной поддержки при выборе вида средств
поражения, наилучшим образом отвечающих решаемой задаче и методам их
наведения.
В общем случае число позиций в составе МПСН может быть различным,
однако все основные ее качественные признаки и свойства реализуются уже в
двухпозиционной системе наведения (ДПСН).
Двухпозиционные радиолокационные системы наведения, представляющие
собой элементарную ячейку МПСН, являются наиболее простым ее вариантом,
на котором удобно рассмотреть все особенности построения и основные этапы
функционирования. Следует подчеркнуть, что особенно ярко специфика ДПСН
проявляется при функционировании их радиолокационных систем в пассивном
режиме. В связи с этим в дальнейшем основное внимание будет уделено двухпозиционным пассивным системам наведения.
Повышение скрытности функционирования является одной из основных
тенденций развития радиолокационных систем наведения. Кардинальным спо­
собом решения проблемы повышения скрытности является использование
пассивных режимов работы, область применения которых ограничена радиоизлучающими целями. Однако в пассивном режиме на самолете можно изме­
рять только бортовые пеленги целей, собственный курс и собственные коорди-
наты путем их счисления. Необходимые для реализации современных методов
наведения оценки дальности до цели и скорости сближения с ней формируются
в однопозиционных пассивных РЛС с низкой точностью в процессе выполне­
ния достаточно длительного маневра самолета-носителя по курсу либо высоте
[23], что делает невозможным использование пассивной информационной сис­
темы для наведения на воздушные цели. Сложность наведения на воздушную
цель состоит еще в том, что для повышения точности оценивания дальности и
скорости сближения самолет-носитель должен лететь под некоторым, доста­
точно большим углом к ней, в то время как для ее поражения линия пути сред­
ства поражения должна пройти через цель.
Более приемлемым является использование пассивной двухпозиционной
РЛС (ДПРЛС), дающей возможность практически мгновенно определить три­
ангуляционным способом координаты излучающей цели с соответствующим
оцениванием дальности до нее и скорости сближения с ней на обеих позициях.
Следует подчеркнуть, что в пассивных ДПСН требуется более сложный
состав оборудования, обусловленный необходимостью обмена информацией
между позициями.
Из пассивных ДПСН наиболее простыми являются угломерные системы,
в которых на ЛА измеряют бортовые пеленги излучающих целей, собствен­
ный курс и собственные прямоугольные координаты. Однако для реализации
современных методов наведения необходимы оценки дальности до цели и
скорости сближения с ней. Эти оценки могут быть определены в пассивной
угломерной двухпозиционной системе наведения в результате фильтрации
косвенных измерений координат излучающей цели, полученных триангуля­
ционным способом [21].
Геометрия взаимного расположения излучающей воздушной цели Ц и лета­
тельных аппаратов С ι и Сг, оснащенных пеленгаторами, в прямоугольной систе­
ме координат, совмещенной с первым самолетом Сь показана на рис. 8.16.
Рис. 8.16
На этом рисунке
- векторы скоростей первой и второй пози­
ций, а также цели; ψι, ψ2 и ψ4 - углы рыскания (курс) самолетов d, С2 и цели;
ει и 82 - углы визирования цели в выбранной системе координат;
- бор­
товые пеленги цели с позиций
- углы триангуляционного
треугольника d С2 Ц; Д1 и Д2 - расстояния до цели от позиций Ci и С2, ДБ расстояние между позициями, называемое базой; ψΒ - угол наклона базы.
Необходимо подчеркнуть что при одинаковой точности измерения борто­
вых пеленгов точность определения местоположения излучающей воздушной
цели определяется среднеквадратической ошибкой (СКО) [22]:
(8.36)
где σφ - СКО измерения пеленгов цели с позиций С ι и С2.
Анализ (8.36) показывает, что точность определения местоположения из­
лучающего объекта зависит не только от ошибок пеленгации, характеризуемых
значением σφ, но и от условий применения, определяемых взаимным располо­
жением позиций и целей.
В общем случае задача формирования управления обеими позициями, од­
новременно обеспечивающего и повышение точности определения местополо­
жения радиоизлучающей цели, и ее уничтожение, является достаточно слож­
ной. Обусловлено это рядом причин.
Во-первых, для повышения точности оценивания местоположения радио­
излучающей цели необходимо, чтобы пеленгаторы двигались по отношению к
ней под некоторыми, достаточно большими углами φι и φ2, поскольку при ма­
лых углах возрастают относительные ошибки пеленгации: Αφι/φι и Δφ 2 /φ 2 · В
то же время для поражения цели линия пути самолетов должна проходить че­
рез цель или упрежденную точку встречи с ней.
Во-вторых, задача одновременного управления двумя позициями стано­
вится многокритериальной, что предопределяет усложнение процедуры синте­
за оптимального управления.
Оптимизация управления пассивной угломерной ДПСН существенно уп­
рощается, если функции перехвата излучающей цели и обеспечения макси­
мальной точности определения ее местоположения разделить между носителя­
ми Ci и С2 [31]. При таком подходе одна из позиций, например наиболее близ­
кая к цели, решает задачу наведения, используя тот или иной метод, а вторая целенаправленно изменяет свое положение в пространстве, обеспечивая на
обеих позициях максимально высокую точность определения местоположения
перехватываемого объекта.
Такой подход дает возможность использовать для синтеза хорошо отрабо­
танные алгоритмы статистической теории оптимального управления [32].
Ниже на основе этой теории приводятся результаты синтеза управления
одной из позиций пассивной ДПСН, обеспечивающего максимально высокую
точность оценивания местоположения радиоизлучающей цели, при условии,
что другая позиция наводится на нее одним из известных способов.
Задача синтеза решается при условии, что выполняются следующие до­
пущения:
1) двухпозиционная система образована АК РЛДН (первая позиция) и на­
водимым на источник радиоизлучения самолетом (вторая позиция);
2) на цель наводится вторая, наиболее близкая к ней, позиция, а АК РЛДН
управляется лишь для повышения точности определения ее местоположения
(рис. 8.5);
3) на каждой позиции измеряются собственный курс (ψι, ψ2), бортовые пе­
ленги (φι,φ2), счисляются собственные координаты
и скорости их
изменения
4) на каждой позиции одним из известных способов [21] оцениваются
дальности
Д],Д 2
до цели и скорости их изменения
Д,!,Д2 ',
5) в течение времени формирования оценок дальностей и скоростей цель
не изменяет скорости и направления полета;
6) на каждом борту имеется система обмена данными, через которую все
измеряемые и оцениваемые фазовые координаты передаются на другую по­
зицию.
Последняя особенность дает возможность вычислять на каждой позиции
базу ДБ и угол ее наклона ψΒ (рис. 8.16).
Кроме того, предполагается, что алгоритмы управления позициями в вер­
тикальной и горизонтальной плоскостях не влияют друг на друга. В связи с
этим в дальнейшем будут рассмотрены алгоритмы управления только в гори­
зонтальной плоскости в предположении, что цель и оба пеленгатора находятся
на одной высоте.
Необходимо подчеркнуть, что синтезируемый закон, будучи достаточно
простым и реализуемым на практике, должен обладать свойством инвариант­
ности к закону, используемому для наведения на цель, и к взаимному ее распо­
ложению относительно пеленгаторов. Анализ формулы (8.36) показывает, что
для снижения ошибок оценивания местоположения цели необходимо в первую
очередь выдерживать угол
(рис. 8.16). В связи с этим в процессе
управления позицией С\, обеспечивающего повышение точности процедур
оценивания, независимо от используемого в позиции С2 метода наведения
должно выполнятся условие
(8.37)
которое в дальнейшем и будет положено в основу синтеза желаемого управления.
Выполнение условия (8.37) требует от самолета С ι движения по прямой,
перпендикулярной линии визирования С2Ц. Поэтому метод наведения самолета
информационного обеспечения условно может быть назван методом ортого­
нального наведения.
При использовании процедуры формирования сигнала управления j n , оп­
тимального по минимуму локального функционала качества в [31] получен ал­
горитм траекторного управления самолетом Cj, определяемый несоответствием
требуемого j r T 1 и фактического j r i ускорений, в виде
(8.38)
где
- оценки требуемых значе­
ний бортового пеленга и угловой скорости линии визирования;
оценки фактических значений угла и угловой скорости линии визирования
CiU,;
- скорость изменения дальности Д{;
- поперечное ускорение са­
молета Ci в горизонтальной плоскости, рассматриваемое в качестве управляю­
щего сигнала;
- коэффициенты штрафа за ошибки управления по φΓ1
и ωπ ; к: - коэффициент штрафа за величину сигнала управления
-
оценка собственного поперечного ускорения.
Воспользовавшись соотношением (8.36) и геометрией взаимного распо­
ложения самолетов и цели, показанной на рис. 8.16, уточним значения φ ΓΤ1 и
ω ΓΤ1 . Из рисунка следует, что
(8.39)
В свою очередь
(8.40)
Анализ соотношений (8.38)-(8.40) позволяет прийти к следующим заклю­
чениям.
Управляющее поперечное ускорение самолета С! определяется ошибками
по угловой координате
и ошибками по угловой скорости Δω Γ1 .
Вес этих ошибок обусловлен соотношениями штрафов
и
условиями применения, определяемыми значениями ^ VLJ\X. При этом на
больших расстояниях, предопределяющих малые значения угловых скоростей,
преобладающее значение имеет управление по угловым ошибкам. В то же вре­
мя на малых расстояниях при достаточно больших значениях угловых скоро­
стей основным является управление по угловым скоростям. Расстояние, на
котором происходит перераспределение сигналов управления, определяется
соотношением штрафов
Для информационного обеспечения алгоритма траекторного управления
(8.38)-(8.40) необходимо на борту каждого самолета формировать оценки соб­
ственного курса, угловой скорости линии визирования, собственного попереч­
ного ускорения, дальности до цели и скорости ее изменения. Следует подчерк­
нуть, что такой набор оценок позволяет реализовать практически все сущест­
вующие методы наведения.
Спецификой функционирования рассмотренной пассивной угломерной
двухпозиционной системы наведения является необходимость обмена между
позициями информацией о собственном курсе, бортовом пеленге цели и их
производных.
Упрощенная структурная схема ИУС угломерной ДПСН в режиме наведе­
ния на радиоизлучающую цель показана на рис. 8.17.
Рис. 8.17
378
Пример траекторий полета цели Ц, ударного самолета С2, наводимого по
методу пропорционального наведения, и самолета информационного обеспече­
ния Ci показаны на рис. 8.18.
Из рисунка видно, что самолет С ι информационного обеспечения движет­
ся по такой траектории, что ац —» 90°, обеспечивая тем самым наивысшую
точность определения местоположения ИРИ, соответственно, и наилучшую
точность наведения. При этом полученный закон управления, являясь инвари­
антным к методам наведения ударного самолета и взаимному расположению
цели и позиций, не налагает принципиальных ограничений на возможность его
реализации ни по составу требуемых измерителей, ни по требованиям к объему
памяти и быстродействию вычислителей.
Рис. 8.18
Следует отметить, что возможны и другие варианты алгоритмов траекторного управления. В частности, если комплекс РЛДН размещен на маломанев­
ренном носителе, не способном удовлетворять условиям формирования (8.38),
то возможен вариант перехвата ИРИ, при котором АК РЛДН движется по пря­
мой линии, а наводимый самолет выполняет функции и информационной, и
ударной позиций.
В заключение необходимо подчеркнуть, что сравнение (8.38) с (8.13) и
(8.32) позволяет сделать вывод об их качественной идентичности. Эта осо­
бенность позволяет судить об универсальности метода, пригодного для ис­
пользования по обширной номенклатуре целей в различных условиях при­
менения.
8.5. Особенности управления летательными аппаратами
при решении различных задач
Основными преимуществами АК РЛДН по сравнению с наземными АСУ
боевых действий являются его потенциально высокие характеристики обнару­
жения малоразмерных и маловысотных воздушных, наземных и морских целей
и возможность оперативного создания адаптивно перемещаемых в заданных
областях пространства подвижных полей информации и управления [34]. В ре­
зультате АК РЛДН имеет определенные преимущества перед наземными ко­
мандными пунктами (пунктами управления) по обеспечиваемым рубежам вво­
да в бой самолетов, особенно на предельно малых высотах.
К важнейшим задачам АК РЛДН относятся задачи информационного
обеспечения боевых действий и управления ЛА, среди которых прежде всего
нужно выделить задачи, условно объединенные в группы работы по воздуш­
ным целям, наземным объектам и с сопрягаемыми летательными аппаратами.
Принципы взаимодействия АК РЛДН с наводимыми Л А при решении задач
«в-в» и «в-п» были рассмотрены в предыдущих главах. Под сопрягаемыми ЛА
понимают истребители прикрытия, ведомые АК РЛДН, самолеты-заправщики,
ретрансляторы воздушного базирования и т. д.
Увеличенный объем решаемых задач, возросшие возможности информа­
ционных и бортовых вычислительных систем предопределяют некоторые осо­
бенности боевой работы АК РЛДН нового поколения, часть из которых кратко
будут рассмотрены ниже.
Боевая работа АК РЛДН начинается с момента загрузки на аэродроме в
базу данных полетного задания и карты местности (карты ТВД). В полетном
задании содержатся маршрут полета носителя и вся оперативно-тактическая
обстановка в зоне его действия. Оперативно-тактическая информация посту­
пает на рабочее место командира расчета, который при с помощи системы
интеллектуальной поддержки принятия решений осуществляет непрерывный
мониторинг оперативно-тактической обстановки и управляет действиями АК
РЛДН. Оперативно-тактическая обстановка непрерывно поддерживается и
обновляется в базе данных БВС на основе информации от внешних и внут­
ренних датчиков [2].
Необходимо подчеркнуть, что многократно возросший объем априорной
информации, загружаемой в базу данных, и возросшая сложность принятия
решения лицами боевого расчета предопределяют необходимость использова­
ния эффективной системы интеллектуальной поддержки принятия решения.
Управление группами истребителей-перехватчиков, как и ранее, осущест­
вляется либо способом командного наведения, либо способом полуавтономных
действий. При командном наведении на борт командира группы истребителей
периодически передаются заданные значения курса, высоты и скорости, мето­
дика формирования которых изложена в п.п.5.2.2.
Более сложная задача управления самолетами возникает при одновремен­
ном наведении групп истребителей на групповые цели. В этом случае применя­
ется координированное наведение.
Координация должна обеспечить одновременный вывод истребителей в
заданные районы относительно цели и под заданными углами атаки. При этом
желательно, чтобы истребители выходили в зону атаки цели с разных сторон. В
частности, при назначении трех групп истребителей для координированного
воздействия целесообразно, чтобы одна из них выводилась в зону атаки цели
под ракурсом, близким к нулю [19] (см. рис. 5.7).
Траектории наведения строятся на основе алгоритмов, рассмотренных в
п.5.2, в том числе и в виде «прямая-разворот-прямая» [19]. Изменяя длину по­
следнего прямолинейного участка (рис. 5.3), можно достичь выполнения усло­
вия одновременности атаки при маневрах цели. При реализации метода наве­
дения используется рассчитанный путь атаки 1, а также заданные величины на­
правления угла атаки и радиуса разворота. Первоначальная величина 1
определяется при решении задачи назначения из условия парирования манев­
ров цели по курсу в некотором диапазоне. На конечном этапе наведения на
сгруппированные цели можно указывать конкретные номера воздушных объ­
ектов, входящих в группу.
Следует отметить, что для группирования маневрирующих групп целей
могут быть использованы не только критерии, рассмотренные в п.5.3, но и бо­
лее сложные критерии, в том числе и линейно-квадратичные функционалы, по­
зволяющие оценить принадлежность самолетов к группе на упреждающие мо­
менты времени.
Необходимо подчеркнуть, что для повышения живучести системы
«АК РЛДН - наводимые самолеты» целесообразно использовать приемы
повышения скрытности наведения, рассмотренные в п.8.2. Среди этих приемов
наиболее простым является наведение перехватчиков непосредственно в об­
ласть пуска ракет (см. рис. 8.1). Весьма перспективными является использова­
ние обхода зон тактического превосходства воздушного противника, если тот
обладает РЛС и средствами поражения с лучшими показателями. Решение об
обходе принимается штурманом наведения АК РЛДН по результатам иденти­
фикации обнаруженных целей. Если перехват воздушных целей выполняется в
зоне обнаружения АК РЛДН противника, то траектории наведения наших ис­
требителей должны выбираться по принципу обеспечения максимума времени
их пребывания в зонах режекции его бортовой РЛС.
Управление истребителями прикрытия, предназначенными для оборо­
ны АК РЛДН, осуществляется с его борта [2]. Истребители прикрытия, как
правило, обладают мощным ракетным вооружением, развитыми системами
управления им, эффективными системами радиоэлектронного противодействия
и связи, а также большим временем полета. При построении алгоритмов управ­
ления истребителями прикрытия учитываются следующие соображения:
опасная для самолета АК РЛДН цель (группа опасных целей) будет оказы­
вать активное огневое, маневренное и помеховое противодействие атакующему
ее истребителю прикрытия (группе истребителей прикрытия);
после пуска ракет по самолету АК РЛДН его последующее уклонение не­
эффективно.
Отсюда вытекают следующие требования к алгоритмам управления ис­
требителями прикрытия:
1) алгоритмы управления истребителями прикрытия должны обеспечивать
преимущество над опасными целями по энергетическим и тактическим харак­
теристикам;
2) алгоритмы управления должны быть ориентированы на работу с оди­
ночными и групповыми целями;
3) время поражения опасных целей должно быть минимально.
Последнее требование связано с дефицитом времени, как правило, возни­
кающим при применении истребителей прикрытия.
Процесс управления истребителями прикрытия условно разбивается
на два этапа: этап назначения на опасные цели и этап собственно наведения
на опасные цели. Результат работы алгоритма назначения состоит в опреде­
лении связок номеров опасных целей и истребителей прикрытия, которые яв­
ляются рекомендациями и могут быть отменены или скорректированы штур­
маном наведения.
Наведение истребителей прикрытия на опасные цели имеет ряд особенно­
стей, связанных с неопределенностью информации о намерениях опасных це­
лей, поэтому требуется статистическое прогнозирование поведения цели до
момента окончания наведения истребителей. Наведение истребителя прикры­
тия на опасную цель может осуществляться любым из известных методов, од­
нако при этом необходимо учитывать возможность выполнения маневра целью
при атаке АК РЛДН. Необходимо отметить, что весьма эффективным способом
срыва атаки истребителей противника самолетами прикрытия является приме­
нение в качестве средств поражения СВЧ-оружия ФП [15], обеспечивающего
вывод из строя информационных систем цели.
Рассмотрим управление истребителями при уничтожении постанов­
щиков активных помех. Если информационная система АК РЛДН не обеспе­
чивает триангуляцию помехопостановщика [34], то на вход алгоритма форми­
рования команд наведения поступает только его пеленг. Истребитель, отраба­
тывая плавные команды ψ τ , VT, HT, выводится на линию пеленга по
кратчайшей траектории и далее удерживается вблизи этой линии. Кроме того,
возможен и другой способ наведения, когда истребитель выводится по крат-
чайшему расстоянию на линию, параллельную текущему пеленгу на постанов­
щик помех. При достижении расстояния до линии пеленга, меньшего дально­
сти обнаружения БРЛС, истребителю передаются команды целеуказания по
азимуту β и углу места ε со значениями команд, соответственно равными
β = ψ τ , ε = 0. Летчик включает режим излучения БРЛС, которая осуществляет
поиск и обнаружение постановщика помех.
При дозаправке в воздухе могут быть две ситуации [34]: ^топливозап­
равщик в зоне топливозаправки; 2) топливозаправщик на маршруте. При нахо­
ждении топливозаправщика в зоне заправки истребитель сначала выводится на
него методом погони, а затем методом маневра в заднюю полусферу. Во вто­
ром случае алгоритм сразу строит траекторию встречи методом маневра в зад­
нюю полусферу. Для обеспечения встречи конечная скорость заправляемого
самолета задается больше скорости топливозаправщика.
Исходными данными для решения задачи вывода самолетов ударной
авиации в районы наземных и надводных целей является [34] маршрут: по­
следовательность маршрутных точек, определяемых координатами, скоростью
и высотой полета на последующем участке маршрута, типом точки. В состав
маршрута могут входить участки, проходимые самолетом как на дозвуковой
скорости, так и на сверхзвуковой.
При командном наведении решение задачи вывода самолета в район цели
сводится к следующему. В ИВС вычисляется и отображается на индикаторе
штурмана наведения текущее положение экстраполяционного маркера, пока­
зывающего требуемое для своевременного выхода на наземную цель положе­
ние самолета. С положением экстраполяционного (планового) маркера сопос­
тавляется реальное положение самолета на каждый момент решения. При от­
клонениях от плана полета вырабатываются команды скорости и курса,
позволяющие устранить имеющееся отклонение. Возможно также решение об­
ратной задачи: установка маркера в реальное положение самолета с определе­
нием фактического времени прибытия в район наземной цели и расхождения
относительно планового времени.
После вывода ударных самолетов в район цели в дальнейшем, в зависимо­
сти от режимов работы их бортовых РЛС и используемых средств поражения,
могут быть использованы методы смешанного наведения, основанные на ис­
пользовании разновидностей алгоритмов траекторного управления (8.13)-(8.18).
Организация управления беспилотными летательными аппаратами
осуществляется следующим образом. Одним из направлений повышения эффек­
тивности радиолокационной разведки, особенно в зонах повышенной опасно­
сти, является организация управления с борта АК РЛДН беспилотными лета­
тельными аппаратами для решения задач по обнаружению и распознаванию
наземных целей [34]. Наиболее простым является вариант боевого применения
Б Л А, предусматривающий выполнение двух этапов.
На первом этапе осуществляются взлет и полет БЛА по маршруту. Мар­
шрут полета формируется на борту БЛА по введенной перед взлетом информа­
ции о маршрутных точках полета. При этом взлет и полет БЛА осуществляют­
ся по программе. Аналогично осуществляется посадка БЛА.
На втором этапе, когда БЛА находится в зоне предполагаемого боевого
применения, управление им берет штурман наведения, находящийся на АК
РЛДН. После этого БЛА могут совершать полет по задаваемой штурманом
программе или находиться под его непосредственным управлением.
Возможны и другие варианты, в том числе и боевого применения БЛА.
При использовании ударных БЛА, предназначенных для уничтожения назем­
ных объектов в зонах повышенной опасности или на больших удалениях от АК
РЛДН, скорее всего будут применяться несколько способов. При использова­
нии одного из них ударный БЛА пускает ракеты В-П (сбрасывает бомбы), ав­
томатически наводящиеся на цели в соответствии с командами целеуказаний,
поступающими от АК РЛДН. При другом варианте наведения управление пу­
щенными ракетами осуществляет штурман наведения АК РЛДН, используя
трехточечный метод, в соответствии с которым линия визирования ракета-цель
должна совмещаться с линией визирования БЛА-цель. Возможен и третий ва­
риант применения, при котором сам БЛА используется в качестве средства по­
ражения (режим «камикадзе»).
При использовании перспективных беспилотных истребителей роль АК
РЛДН скорее всего будет сводиться к управлению пилотируемым самолетом
командира группы.
Управление ведомыми АК РЛДН предполагает одновременную работу
нескольких комплексов [34], разнесенных друг от друга на расстояния, при ко­
торых обеспечивается перекрытие их радиолокационных полей и возможна ор­
ганизация радиосвязи между ними. При групповых действиях АК РЛДН один
из них назначается ведущим, а остальные - ведомыми. Ведущий АК РЛДН
осуществляет связь с наземными КП, принимает радиолокационную информа­
цию от ведомых АК РЛДН, обобщает ее и управляет ведомыми АК РЛДН как
источниками информации.
Применение группы АК РЛДН позволяет улучшить управление авиацией,
поскольку в зонах перекрытия их радиолокационных полей значительно улуч­
шаются характеристики трассовой информации о воздушных целях, снижается
влияние «слепых» зон РЛС каждого из АК РЛДН на проводку целей в объеди­
ненной зоне видимости. Величина зоны перекрытия радиолокационных полей
соседних АК РЛДН зависит от дальности обнаружения цели определенного
класса и от расстояния между АК РЛДН.
Групповые действия целесообразны в тех ситуациях, когда необходимо
одновременно использовать два и более комплексов, например для повышения
скрытности наведения при работе по радиоизлучающим целям (см. рис. 8.6) и в
полу активных режимах (см. рис. 8.3).
При организации взаимодействия группы АК РЛДН с управляющим КП
АСУ ведущий АК РЛДН передает на КП обобщенную от нескольких АК РЛДН
информацию и принимает распоряжения от КП на выполнение боевых дейст­
вий каждого из АК РЛДН через один приемопередающий центр.
При групповых действиях АК РЛДН необходимо централизованное
управление их полетом, так как для создания сплошного радиолокационного
поля большое значение имеют расположение зон барражирования в зоне ответ­
ственности, вид фигуры барражирования АК РЛДН и синхронность полета
взаимодействующих АК РЛДН в зонах барражирования. Реализация централи­
зованного управления обеспечивается соответствующими алгоритмами траекторного наведения ведущим и ведомыми самолетами АК РЛДН.
8.6. Перспективы развития командных радиолиний
управления
Одним из основных направлений улучшения показателей эффективности
КРУ является повышение скрытности их работы. Рациональным направле­
нием повышения скрытности КРУ является усложнение условий обнаружения
факта их работы станциями радиотехнической разведки противника.
Это усложнение может быть достигнуто за счет использования сверхши­
рокополосных сигналов с постоянной спектральной плотностью в пределах ак­
тивной ширины спектра. Такие сигналы по своему проявлению похожи на бе­
лый шум, что затрудняет их обнаружение.
Кроме того, в таких сигналах полезная информация распределена по всему
спектру, что затрудняет противоборствующей стороне ее выделение и искаже­
ние даже при обнаружении факта излучения КРУ.
Еще одним направлением повышения скрытности является сокращение
области пространства, в пределах которого распространяется сигнал КРУ, за
счет использования антенн направленного действия.
Ниже рассматриваются принципы построения и особенности функциони­
рования КРУ, в которых используются эти способы повышения скрытности.
8.6.1. Командные радиолинии управления со сложными сигналами
Сложные сигналы - сигналы, для которых произведение активной шири­
ны спектра на их длительность, называемое базой сигнала, существенно пре­
вышает единицу. Основным достоинством КРУ со сложными сигналами явля­
ются более высокие скрытность и помехоустойчивость по отношению к узко­
полосным помехам. Более высокая скрытность КРУ со сложными сигналами
достигается за счет повышения энергетической скрытности, уменьшения
сведений о наличии информации и усложнения условий радиоразведки пара­
метров передаваемых команд.
Повышенная энергетическая скрытность объясняется следующим обра­
зом. Как известно, вероятность Р0б обнаружения сигнала в смеси с белым шу­
мом зависит от отношения
- энергии Ер полезного сигнала к спек­
тральной плотности G0 белого шума для частот
Когда речь идет о разве­
дывательном приемнике, под G0 и Ер нужно понимать спектральную плотность
его внутреннего шума и энергию полезного сигнала на его входе соответствен­
но. Если структура сложного сигнала не известна разведывательному приемни­
ку, то в последнем принцип сжатия сигнала не реализуется, что эквивалентно
уменьшению энергии принимаемого сигнала. При этом уменьшение энергии по
сравнению со случаем согласованного приема пропорционально отношению
ширины спектра сигнала к полосе пропускания разведывательного приемника.
Повышение скрытности путем уменьшения сведений о наличии информа­
ции в данном радиосигнале связано с псевдослучайностью, т. е. с подобием
шума сигнала, излучаемого антенной КРУ. При приеме сложных сигналов
обычным разведывательным приемником (без осуществления принципа сжа­
тия) они будут восприниматься как шум. Усложнение условий радиоразведки
параметров передаваемых команд при использовании сложных сигналов дос­
тигается за счет сложной модуляции в передатчике КРУ, характер которой мо­
жет изменяться по программе в процессе наведения ОУ.
Наиболее часто в качестве сложного сигнала в КРУ используется фазокодо-манипулированный (ФКМ) сигнал, представляющий собой пачку радио­
импульсов со скважностью Q = 1, начальные фазы которых изменяются на 180°
при переходе манипулирующего сигнала от положительного значения к отри­
цательному. Каждый отдельный импульс в пачке называют элементарным.
Широкую известность ФКМ-сигналы получили прежде всего потому, что они
обеспечивают наименьшую вероятность Р0 ошибочного приема каждого от­
дельного элементарного импульса с возможными двумя значениями начальных
фаз колебаний на фоне стационарного белого шума. Другая причина, вызвав­
шая большой интерес к ФКМ-сигналам, связана с тем, что они обеспечивают
хорошие по форме функции неопределенности. Эти функции оказываются
практически такими же, как и для шумовых сигналов. Для получения функции
неопределенности, имеющей узкий пик главного лепестка по оси времени и
низкий уровень боковых лепестков, гармонический радиосигнал манипулируется по фазе импульсными сигналами, отображающими так называемые дво­
ичные М-последовательности.
Двоичной М-последовательностью называют формируемую при помощи ре­
гистра сдвига последовательность видеоимпульсов, имеющую максимально воз­
можный период ηΜπ· При этом под периодом пМп понимают максимально воз­
можное число двоичных цифр, после которого последовательность повторяется.
ФКМ-сигналы, получаемые за счет фазовой манипуляции гармонического сиг­
нала импульсами М-последовательности, принято называть шумоподобными
либо псевдослучайными сигналами. Такие названия они получили благодаря
тому, что 1) при большом числе элементарных импульсов их функция неопре­
деленности близка к функции неопределенности шума; 2) спектр таких сигна­
лов сплошной около каждой гармоники М-последовательности; 3) для разве­
дывательной радиоаппаратуры такие сигналы представляются случайными, так
как нельзя точно предсказать, какой сигнал появится в каждый последующий
момент времени.
При построении КРУ двоичные М-последовательности используются сле­
дующим образом. Электрическим сигналом up, (например, видеоимпульсом)
отображающим разряд двоичного кода, который применяется в обычных узко­
полосных КРУ с КИМ, модулируется двоичная М-последовательность иМп- Та­
кую модуляцию можно осуществить путем формирования произведения uPuMn·
Подобный способ модуляции приводит к тому, что положительный видеоим­
пульс Up не изменяет полярность М-последовательности, а отрицательным им­
пульсом Up полярность М-последовательности меняется на противоположную.
Модулированная М-последовательность используется для фазовой манипуля­
ции сигнала несущей частоты, генерируемого радиопередатчиком КРУ. На
приемной стороне КРУ со сложным сигналом сначала выделяется модулирую­
щая М-последовательность, которая затем преобразуется в видеоимпульсы иВи,
характеризующие разряды двоичного кода, используемого в шифраторе для
передачи количественных значений команд управления. Дальнейшее преобра­
зование иВи осуществляется так же, как и в КРУ с простыми сигналами и би­
нарным кодированием передаваемых команд.
Из сказанного выше следует, что в отличие от узкополосной КРУ, в пере­
дающей установке которой применяется двойная модуляция, для КРУ со слож­
ным сигналом характерна тройная модуляция. Целесообразным видом тройной
модуляции является сочетание кодово-импульсной модуляции, балансной ам­
плитудной модуляции и фазово-кодовой модуляции (манипуляции). Вместо
фазово-кодовой манипуляции можно использовать частотную модуляцию на­
пряжения несущей частоты в пределах каждого элементарного импульса пачки.
Структурная схема шифратора одноканальной КРУ с ФКМ-сигналами пред­
ставлена на рис. 8.19 [29]. При этом на схеме не показаны цепи формирования
сигналов пословной синхронизации. Для иллюстрации процессов, протекающих в
отдельных элементах шифратора, на рис. 8.20 показаны эпюры напряжений.
Шифратор КРУ с КИМ, на который поступает передаваемая команда К у ,
является устройством со структурной схемой, изображенной на рис. 5.9 слева
от точек ΑΙ, Α2. Если, например, используется трехзначный двоичный код, то
при передаче команды К у , отображаемой двоичным числом 101, на выходе
шифратора КРУ с КИМ образуется напряжение иш (А2, рис. 5.9), показанное на
рис. 8.20, г.
Рис. 8.19
Рис. 8.20
Сигнал иш воздействует на фазоразностный модулятор (ФРМ). На второй
вход ФРМ подается напряжение иМп М-последовательности, период п м п кото­
рой для конкретности последующих рассуждений принят равным семи
(рис. 8.20, е). Предполагается, что в генераторе М-последовательности исполь­
зуется регистр сдвига с обратной связью через сумматоры по модулю два. Пе­
редвигающими импульсами для регистра сдвига являются тактовые импульсы
игти с периодом следования
(рис. 8.20, а), а импульсами запуска генерато­
ра М-последовательности служат импульсы Ui (рис. 8.20, б) с периодом следо­
вания
формируемые делителем 1:пМп и используемые од­
новременно для управления кодирующим устройством. Период следования
ТГти генератора тактовых импульсов равен
Делитель 1:пМп связан с
делителем 1:2, который вырабатывает импульсы с периодом следования
и определяет длительность символов двоичного кода в напряжении иш·
кодирующим устройством в ФРМ напряжение иш преобразуется так, что
единичный разряд иш отображается двумя положительными импульсами, каж­
дый из которых имеет амплитуду UG и длительность
(рис. 8.20, д). В
то же время нулевому значению разряда в сигнале иш кодирующее устройство
приводит в соответствие один положительный и один отрицательный видео­
импульсы, также показанные на рис. 8.20, д.
С кодирующего устройства импульсы ику подаются на балансный модуля­
тор, где М-последовательность имп (рис. 8.20, ё) умножается на напряжение
иКу. В результате образуются импульсы иБм, которые при пПм=7 и N=3 имеют
вид, представленный на рис. 8.20, ж. Из рис. 8.20, ж видно, что положитель­
ные импульсы иКу не изменяют параметры М-последовательности, а когда
ику<0, полярность импульсов имп меняется на противоположную.
В устройстве ФКМ осуществляется фазовая манипуляция гармонического
напряжения с несущей частотой и таким образом получается ФКМ-сигнал ивых,
который подается на усилитель радиопередатчика, связанный с его антенной.
Структурная схема дешифратора КРУ с ФКМ-сигналом показана на
рис. 8.21, а иллюстрирующие ее функционирование диаграммы напряжений —
на рис. 8.22 [29]. На вход дешифратора подается напряжение иУпч с усилителя
промежуточной частоты радиоприемника. Линии задержки Л31 и Л32 вместе с
весовыми сумматорами 7 и 2 (ВС1 и ВС2) образуют два фильтра, каждый из
которых согласован с пачкой импульсов, характеризующих М-последова­
тельность, и осуществляет ее сжатие. Коэффициенты передачи ВС1 для любого
из N отводов Л31 (парциальные коэффициенты передачи) подбираются так,
чтобы осуществлять сжатие М-последовательности. При этом парциальные ко­
эффициенты передачи ВС1 для отводов 1,2,...,N выбираются равными +К П и
-к п , если необходимо усиливать импульсы с начальными фазами, равными ну­
лю и 180° соответственно. Тогда в зависимости от амплитуды импульсов, по­
ступающих с шифратора КРУ с КИМ (рис. 8.19), начальная фаза сжатого
импульса может быть равной нулю или π. Если используются трехзначный
двоичный код с периодом пМп=7 и напряжение иш (рис. 8.20, г), которое ото­
бражает двоичное число 101, то образующееся на выходе ВС1 напряжение uBci
без учета боковых лепестков имеет вид, представленный на рис. 8.22, а. Здесь
символами 0 и π обозначены начальные фазы сжатых импульсов.
Рис. 8.21
Рис. 8.22
Линия задержки Л32 и весовой сумматор ВС2, имеющие такие же пара­
метры, как и Л31 и ВС1, формируют импульсы иВс2 (рис. 8.22, б), которые
представляют собой сдвинутые на время ТМп импульсы uBci· Фазовый детектор
(ФД) вырабатывает видеоимпульсы иФД (рис. 8.22, в), под действием которых
декодирующее устройство формирует сигналы и д у (рис. 8.22, г), повторяющие
по структуре напряжение и ш (рис. 8.20, г).
8.6.2. Особенности построения бортовой аппаратуры
приема команд наведения и активного ответа
Передачу команд управления и целеуказания с АК РЛДН на самолет про­
ще всего организовать при использовании в КРУ ненаправленных антенн. Од­
нако для повышения помехоустойчивости целесообразно применение направ­
ленных антенн, что позволяет существенно поднять соотношение сигнал/шум
на входе приемной установки КРУ, однако при этом значительно усложняется
задача вхождения в связь АК РЛДН с наводимыми самолетами.
К решению данной задачи привлекается система активного запроса и от­
вета, обеспечивающая радиолокационное визирование своих воздушных объ­
ектов и функционирующая следующим образом. Станция САЗО, работающая
на АК РЛДН в режиме кругового или секторного обзора, излучает кодирован­
ные сигналы запроса. При облучении своего самолета узким лучом антенны
этой станции бортовой ответчик излучает кодированный ответный сигнал, ис­
пользуемый на запросной стороне для определения координат (как правило,
дальности и азимута) воздушных объектов и называемый поэтому координат­
ным сигналом, а также сигналы, содержащие полетную информацию (высоту,
индивидуальный номер самолета, остаток топлива и т. д.). Так как полетная
информация содержит большой объем данных, то для обеспечения заданной
разрешающей способности системы активного запроса и ответа в каждом пе­
риоде запроса бортовая аппаратура выдает обычно одно двоичное цифровое
слово, характеризующее один из параметров полета. Наряду с полетной ин­
формацией пункт наведения может получать с борта самолета разовые сооб­
щения, информирующие о наличии боезапаса, переходе на новые радиоданные,
окончании атаки, возникновении аварийной ситуации и т. п.
Для передачи команд наведения передающая антенна КРУ предварительно
ориентируется в направлении на заданный самолет, используя результаты из­
мерения координат воздушных объектов системой активного запроса и ответа.
Далее начинается этап непосредственной передачи команд управления на борт
наводимого самолета. Однако при использовании подобной процедуры нет
полной уверенности в прохождении передаваемых команд через приемную ус­
тановку КРУ. Поэтому для повышения достоверности передачи команд управ­
ления применяется радиоканал обратной связи, используя для этой цели уста­
новленный на самолете ответчик САЗО. Возможный вариант структурной схе­
мы совмещенной бортовой аппаратуры приема команд наведения и активного
ответа показан на рис. 8.23.
Антенная система, служащая для приема как сигналов САЗО, так и сигна­
лов КРУ, имеет круговую диаграмму направленности. Сигналы САЗО с антен­
ной системы поступают в соответствующий приемник (ПРМ САЗО), где выде­
ляется запросный импульсно-временной код, подвергающийся затем декодиро-
Рис. 8.23
ванию в дешифраторе запросного кода (ДШР ЗК). Структура запросного кода в
процессе радиовизирования меняется и зависит от того, какие параметры поле­
та самолета требуются пункту наведения для решения стоящих перед ним задач.
На выходе ДШР ЗК формируется импульс запуска шифратора ответного
кода (ШР ОК), а также сигнал, характеризующий тип запрашиваемого пара­
метра полетной информации. Координатный импульсно-временной код, ис­
пользуемый в станции САЗО на ПН для определения координат самолета, че­
рез сумматор подается в передатчик, который конструктивно может входить в
состав ответчика радиолокационной системы государственного опознавания
либо ответчика системы управления воздушным движением. Вслед за коорди­
натным кодом в ответчик из шифратора параметров полетной информации
(ШР ППИ) поступает двоичный цифровой код, соответствующий текущему
значению интересующего пункт наведения параметра полета. При наличии ра­
зовых сообщений, сформированных в шифраторе разовых команд (ШР РК),
они также могут выдаваться через ответчик.
Момент выдачи команд управления определяется в передающей установке
КРУ при помощи сигналов активного запроса и активного ответа. Для этого в
направлении, где предполагается нахождение самолета, передающая антенна
КРУ излучает адресный запросный сигнал, соответствующий индивидуально­
му номеру самолета. Когда луч антенны передающей установки КРУ окажется
направленным на заданный самолет, бортовая аппаратура последнего прини­
мает адресный запросный сигнал. При совпадении принятого адреса с индиви­
дуальным номером самолета вырабатывается адресный ответный сигнал, кото­
рый через передатчик и антенную систему самолетного ответчика излучается в
пространство. Получение адресного ответного сигнала на ПН является под­
тверждением возможности начала передачи команд управления на самолет.
Реализация задач по установлению связи между ПН и самолетом в бортовой
аппаратуре возлагается на показанные на рис. 8.23 антенную систему, прием­
ник КРУ (ПРМ КРУ), дешифратор адресного запросного сигнала (ДШР АЗС),
шифратор адресного ответного сигнала (ШР АОС) и сумматор.
При приеме команд наведения в дешифраторе (ДШР КН) проводятся их
декодирование и анализ правильности принятого набора команд. Если приня­
тые цифровые двоичные коды соответствуют разрешенным комбинациям, оп­
ределяемым используемым на ПН методом помехоустойчивого кодирования,
то формирователь сигнала-квитанции (ФСК) вырабатывает импульсновременной код квитанции, поступающий через сумматор на передатчик ответ­
чика. В случае отсутствия квитанции передающая установка КРУ повторно из­
лучает не прошедший через бортовую аппаратуру КРУ набор команд. Следует
отметить, что использование помехоустойчивого кодирования не является обя­
зательным условием функционирования КРУ.
Для вызова с борта самолета по каналу КРУ разовых сообщений и некото­
рых параметров полета в один из наборов передаваемых с ПН команд могут
быть включены специальные команды, при получении которых запускаются
соответственно шифраторы полетной информации и разовых команд, форми­
рующие двоичные цифровые коды, определяемые содержанием передаваемых
с борта самолета сообщений.
8.7. Авиационный комплекс радиолокационного дозора
и наведения как элемент глобальной сетецентрической
информационно-управляющей системы
В настоящее время одной из самых востребованных и интенсивно разви­
вающихся технологий является технология пространственно распределенных
информационных систем. Она охватывает все более обширные области дея­
тельности человека от сверхбыстродействующих вычислительных систем и до
сверхсложных многопозиционных информационно-управляющих систем. Объ­
единенные в единую сеть, распределенные системы обеспечивают качественно
новые признаки по объему и быстродействию обработки информации, уско­
ренному доступу к ее получению, повышению ее точности и достоверности.
Территориально распределенные информационные системы, объединенные в
единую сеть, получили название сетецентрических. Эти системы находят все
большее применение не только в народном хозяйстве, но и в военном деле при
ведении как широкомасштабных боевых действий в рамках стратегии бескон­
тактных войн [42], так и локальных боевых действий на ограниченных участ­
ках территории.
Концепция сетецентрической войны представляет собой сложившуюся в
последние годы в США систему взглядов на ведение боевых действий в усло­
виях всеобщей компьютеризации сил и средств вооруженной борьбы, а также
на военно-техническое обеспечение этих действий.
Основой данной концепции является представление любого вооруженного
подразделения в виде компьютерной сети, объединяющей элементы трех ви­
дов: сенсоры (средства вскрытия и отслеживания объектов противника в полосе
ответственности подразделения), факторы (средства огневого, радиоэлектрон­
ного и иного воздействия на вскрытые объекты) и интеллектуальные (инфор­
мационно-управляющие) элементы, реализующие функции анализа ситуации,
принятия и реализации решений по управлению сенсорами, факторами и под­
чиненными подразделениями, а также по информированию вышестоящих и
взаимодействующих подразделений, выполнению команд (нацеливаний) вы­
шестоящих подразделений.
Концепция бесконтактных войн [42] предусматривает следующие фазы ве­
дения боевых действий: 1) достижение информационного превосходства; 2) по­
давление средств разведки, связи и управления; 3) завоевание превосходства в
воздухе; 4) последовательное уничтожение средств поражения противника, ос­
тавшихся без информационной поддержки; 5) окончательное уничтожение оча­
гов сопротивления противника.
Выполнение каждой фазы достигается за счет значительного уменьшения
длительности боевого цикла «обнаружение-опознавание-целеуказание-пораже­
ние» по сравнению с противником, а также за счет более точных и полных све­
дений о противостоящей группировке.
С этой точки зрения одной из наиболее сильных сторон высокотехноло­
гичных армий является интеграция разнородных технических средств в единые
разведывательно-ударные комплексы на основе широкого использования со­
временных информационных технологий.
Анализ способов ведения боевых действий США и НАТО в военных кон­
фликтах в Югославии, Афганистане и Ираке показал, что эффективное приме­
нение систем высокоточного оружия невозможно без надежного разведыва­
тельного обеспечения, четкого представления наземной и воздушной обстанов­
ки и точной и своевременной координации всех имеющихся средств.
Например, при подведении итогов операции «Свобода Ираку» (2003) ко­
мандованием ВВС США были приведены следующие факты.
По сравнению с операцией «Буря в пустыне» (1991), благодаря активному
использованию разведывательной авиации и внедрению элементов сетецентри-
ческих технологий, время оказания непосредственной авиационной поддержки
(с момента подачи заявки до применения вооружений по цели) сократилось с
72 ч до 20 мин.
За этот же период времени процент использования высокоточного оружия
авиацией ВВС изменился с 8 до 70, что позволило намного более эффективно
наносить удары по объектам противника при существенном снижении потерь
своих войск в результате так называемого «дружественного огня» и избежать
лишних жертв среди гражданского населения.
Благодаря всестороннему разведывательному обеспечению операции, на­
ступление наземной группировки удалось обеспечить значительно меньшим
числом сухопутных войск, чем в 1991 г.
Для уничтожения пространственно разнесенных объектов необходима
сложная территориальная система информационного обеспечения и нанесения
удара, получившая название сетецентрического оружия.
Применение такого рода систем позволяет существенно повысить эффек­
тивность информационно-управляющих систем военного назначения за счет
возрастания объема и достоверности получаемой информации, мобильности ее
обновления, применения территориально удаленных средств поражения (кон­
цепция длинной руки), расширения номенклатуры поражаемых целей, возмож­
ности уничтожения целей со сниженной радиолокационной заметностью, ис­
пользования новых приемов ведения боевых действий [12].
В общем случае сетецентрическая система состоит из совокупности
спутниковых разведывательных и навигационных систем, авиационных ком­
плексов радиолокационного дозора и наведения разведывательно-ударных
комплексов (РУК), информационных систем и средств поражения кораблей,
ракетных систем различного назначения и базирования, беспилотных разведы­
вательных и ударных летательных аппаратов (БЛА) и т. д. (рис. 8.24). Как
можно видеть из рисунка, все комплексы, являющиеся частью сетецентрической системы, информационно связаны друг с другом напрямую или через дру­
гие узлы. Следует отметить, что рисунок отображает только наиболее явные
связи. В общем случае сетецентрическая система превращается в информаци­
онное облако, где связь даже между двумя узлами может быть установлена
множеством способов.
Традиционное управление войсковыми соединениями обычно приводит к
несогласованным действиям, поскольку соединения, участвующие в боевой
операции, представляют различные рода войск:
авиацию с различными типами ЛА;
артиллерию разного назначения и калибра;
ракетные войска различного назначения;
корабли и подводные лодки разного класса;
сухопутные войска.
Рис. 8.24
Все они по-своему решают поставленные перед ними задачи. Общую картину боевой операции можно получить, лишь объединив сведения о действия
и их результатах для каждого участника операции.
То обстоятельство, что каждый из участников операции выполняет свов
конкретную задачу без учета действий остальных войск, не дает возможности
полной мере реализовать свой потенциал и потенциал всей группировки войск
выполняющей стратегическую задачу.
В такой ситуации стратегическая задача не может быть решена полно
стью, несмотря на высокие боевые качества каждого из участников. Другими
словами, преимущество на поле боя будет у той стороны, которая сможет лучше воссоздать полную картину боевой операции и использовать ее для выбор,
направлений конкретных ударов в оптимальные моменты времени.
Оптимальные решения могут быть приняты при новом эффективном способе управления войсками на основе методов сетецентрических боевых опера­
ций [42]. При таком способе управления каждый участник боевой операции
выполняет свою конкретную задачу и обменивается сведениями о ее ходе с остальными участниками, что позволяет воссоздать в реальном времени полную
и детальную картину хода всей операции, оценить роль каждого участника и
скорректировать его действия.
Сетецентрические методы проведения боевых операций - это по суще­
ству использование преимуществ в информационном обеспечении для дости­
жения превосходства в ходе боевых действий. Такое превосходство требует
создания «сетецентрических» связей между участниками операции и обобществ­
ления на их основе территориально разделенных боевых частей. Достоинство
доступа к полной картине операции всеми участниками состоит в улучшении
координации их действий, повышении скорости реакции командования на из­
менение обстановки, а следовательно, и в повышении эффективности выпол­
нения стратегической задачи операции.
Перечисленные преимущества достигаются:
объединением всех вооруженных сил в единой сети, что значительно уве­
личивает возможности передачи информации по скорости, объемам и направ­
лению;
увеличением пропускной способность сети, улучшающей возможное ка­
чество информации и позволяющей формировать достоверную картину боевых
действий на больших пространствах в реальном масштабе времени;
формированием оптимальных вариантов боевого применения информаци­
онных систем и средств поражения с учетом достоверной картины театра воен­
ных действий и вариантов предложенных автоматизированными системами
поддержки принятия решений;
выбором лучших исполнителей для решения разнородных боевых задач;
способностью исполнителей в реальном масштабе времени получать прика­
зы и на своем уровне выполнять их, имея полную картину боевой обстановки.
Боевые действия - сложная среда для построения сети и поддержания ее в
работоспособном состоянии, поскольку уровень различных помех высок, а со­
став источников полезных сигналов не постоянен и заранее не известен. В бы­
строменяющейся боевой ситуации времена жизни разных датчиков информа­
ции (ракета, БЛА, самолет-разведчик) сильно различаются, что сильно затруд­
няет формирование обобщенной информации о бое.
В информационно-ориентированных сетевых системах применяются спе­
циальные методы размещения сведений от датчиков сети в самой сети. Эти ме­
тоды позволяют получать данные любому приложению или системе, которым
они нужны, и никак не связаны с состоянием датчика, от которого они получе­
ны. Уведомление о возможности получения данных поступает в сеть автомати­
чески. В такой сетевой организации тот, кто пользуется данными, не обязан
знать, откуда они поступили; он должен знать, что данные есть, доступны и
пригодны для использования.
Целесообразность применения ориентированной на объединение данных
архитектуры сети для создания «сетецентрической» системы индикации и
управления подтверждена практикой. Такая архитектура получила название
«дейтацентрической» модели «публикации и подписки на данные».
В настоящее время большинство систем, построенных на базе «дейтацен­
трической» модели, учитывает открытые стандарты. Это дает возможность
разработчикам создавать составные части «сетецентрических» систем управле­
ния боевыми операциями, зная только о формате имеющихся данных и не за­
думываясь о протоколах их получения [18].
Следует подчеркнуть, что уже ставится вопрос о создании глобальной сете
центрической информационно-управляющей системы, способной реализован
стратегию бесконтактных войн [42]. Ниже более подробно будут рассмотрены
некоторые технологические аспекты создания глобальных сетецентрических ин
формационно-управляющих систем с участием АК РЛДН различного назначе
ния, а также состояние этих разработок в США. Следует отметить, что термш
«глобальный» означает не только огромный пространственный охват в процеш
решения информационных и ударных задач, но и огромное количество инфор­
мации, хранящейся и циркулирующей в сети, а также возможность своевремен­
ного осуществления тылового обеспечения в любой области сети. Среди элемен­
тов информационно-управляющей сети важная роль отводится АК РЛДН [7].
Особая роль АК РЛДН в составе сетецентрической системы обуслов­
лена
возможностью мониторинга очень больших объемов пространства и пло]
щадей земной и водной поверхностей;
мобильностью перемещения информационных и управляющих полей в
пространстве;
наличием на борту большого числа информационных датчиков различной
физической природы, среди которых прежде всего необходимо выделить все­
погодную РЛС, ОЭС и станцию радиотехнической разведки;
наличием широкополосных, быстродействующих систем передачи данных
и обмена информацией;
наличием большого числа сопрягаемых информационных (ведомые АК
РЛДН, БЛА, ретрансляторы) и ударных (истребители, ударные самолеты, ком­
плексы ПВО и т. д.) элементов;
универсальностью, определяемой способностью работать как по воздуш­
ным, так и наземным (надводным) целям;
способностью решать не только информационные, но и управленческие
задачи;
использованием бортовых цифровых распределенных вычислительных
систем;
наличием связи с КП различного уровня и назначения.
Как видно из перечисленного выше, в «сетецентрической» системе
АК РЛДН становится одним из важнейших информационных и обрабатываю­
щих узлов, что предъявляет повышенные требования к его надежности и обес­
печению выживания в боевых действиях. Кроме того, можно спрогнозировать
большой потенциал использования АК РЛДН и в мирное время.
Следует обратить внимание, что реализация взаимодействия между
АК РЛДН и беспилотными летательными аппаратами (БЛА), оборудованными
различными средствами ведения разведки, позволит значительно расширить
возможности АК РЛДН в «сетецентрической» системе. В зависимости от
конкретной обстановки могут быть использованы БЛА с разным составом обо­
рудования. Весьма многообещающей является также возможность интеграции
и с ударными БЛА. Так, например, БЛА, несущие ракеты класса «воздухвоздух», способны обеспечить активную оборону АК РЛДН.
«Сетецентризм» с использованием боевых систем, в том числе и средств
ДРЛО, формирующих определенные данные и средства их поддержки, осуще­
ствляющих оптимальное распределение информации уже реализуется в проек­
тах по разработке новых и модернизации существующих средств вооружения.
Все эти средства в течение срока службы будут оснащаться аппаратнопрограммными системами, превращающими их в узлы распределенной системы.
Блоком НАТО в настоящее время проводятся работы по созданию единой ин­
формационно-управляющей сети в масштабах всего Альянса. Такая сеть стро­
ится на принципах C4ISR (Command, Control, Communication, Computing, Intelli­
gence, Surveillance and Reconnaissance) - командование, управление, связь, об­
работка данных, разведка, наблюдение и обнаружение. Возможности сетевого
управления боевыми действиями с самолетов ДРЛО в реальном времени, при­
обретенные ими после соответствующих модернизаций, играют все большую
роль в воздушных компаниях США и НАТО.
Примером такой модернизации может быть переоснащение самолета
ДРЛО ВМС США - «Хокай» Е2-С. Модернизация сетевых возможностей и
систем Е2-С состоит в установке нового программного обеспечения связую­
щего слоя, реализующего метод «сетецентрической» архитектуры и повы­
шающего показатели эффективности (в частности, увеличение пропускной
способности интерфейсов). До модернизации Е2-С «Хокай» был оборудован
комплексом датчиков и систем сбора данных, каналами связи с другим обору­
дованием и операторами комплекса. Каналы связи были построены на основе
технологии «точка-точка» или «точка-многоточка». Модернизация Е2-С пре­
образовала комплекс его систем в платформу, строящую по данным от различ­
ных датчиков (в том числе РЛС РЛДН) полную картину угроз нападения.
Платформа в соответствии с этой картиной вырабатывает программу мер по их
нейтрализации.
Центральной задачей модернизации стало создание системы объединения
данных и шины передачи данных как услуг (другим термином описания этой
системы стало понятие «глобальное пространство данных»).
Абстрагирование данных и механизмов обеспечения качества обслужи­
вания от уровня приложений и перемещение их в глобальное пространство
данных позволили сделать систему независимой от конкретной реализации
источника поступления данных. Такой подход дает возможность проводить
модернизацию на основе существующих элементов и выполнять проекты с
учетом объективных потребностей заказчиков, а не потенциала определенных
технологий.
Аналогичная модернизация сетевых возможностей проводится и для са­
молета ДРЛО AWACS Е-3. Перспективные самолеты ДРЛО уже с самого нача­
ла разрабатываются как ключевые узлы «сетецентрической» системы.
Системы связи на основе «дейтацентрической» модели - это необходимая
предпосылка для построения «сетецентрической» системы вооружения. Одна­
ко только аппаратная и протокольная поддержка сети недостаточна. Необхо­
димы еще две составляющие:
набор стандартов, лежащий в основе проекта;
всеобъемлющая распределенная архитектура, в которую включены при­
ложения, операционные системы и базы данных, связанные между собой на
основе открытых стандартов
Можно отметить, что использование открытых стандартов в информаци­
онных технологиях играет главную роль в построении систем вооружения на
основе методов «дейтацентрического сетецентризма». Без применения таких
стандартов невозможно скоординировать формирование данных и их исполь­
зование в боевых условиях, в которых принимают участие многие системы и
средства. Стандарты образуют взаимоувязанную систему. Только на их основе
можно сформулировать такие требования к формату данных и характеристикам
пропускной способности, которые определяют работу приложений, исполь­
зующих циркулирующие в сети данные. Именно сетевая инфраструктура, под­
чиняющаяся этим стандартам, должна обеспечить возможность применения
«сетецентрического» метода при проведении боевых операций.
В основе разработок общей сетевой инфраструктуры для ВМС и ВВС США
лежит платформа NESI (Network-Centric Enterprise Solutions for Interoperability «сетецентрическое» решение для согласованной работы корпоративных при­
ложений) [18]. Платформа построена на основе методов создания «сетецентри­
ческого» решения в соответствии с ТЗ МО США на проект «сетецентрические
способы ведения боевых действий - Network-Centric Warfare.
Практически платформа NESI абстрагирует данные, сформированные в
конкретной системе, и переносит их в «дейтацентрическую» среду. Примене­
ние NESI означает переход к универсальной шине данных, похожей на шину
обслуживания серверов в корпоративных системах. Но универсальная шина
данных военной «сетецентрической» инфраструктуры обеспечивает распреде­
ление потоков данных между различными средствами вооружения в режиме
жесткого реального времени. Так, например, навигационные данные для
управления движущимися объектами (ЛА, БЛА, кораблями, наземными под­
вижными боевыми установками) публикуются на шине, а не рассчитываются
для каждого конкретного средства.
Воплощение в жизнь изложенных выше факторов для ведения «сетецентрических» военных операций возможно только на основе построения инфра­
структуры со специальными требованиями. В этой структуре приложения и их
составляющие должны располагаться в рабочих узлах сети и иметь доступ к
любым хранящимся в ней данным. Инфраструктура представляет собой ком­
бинацию сред для передачи информации, протоколов и программного обеспе­
чения, реализующих доступ к данным в любом месте сети в реальном времени.
Такая инфраструктура может быть создана на основе протокола Internet
Protocol Version 6 (IPV6), определяющего защищенную связь с гарантирован­
ным уровнем доступности для одновременного использования информации из
авторизованных источников несколькими потребителями. Данные могут рас­
сылаться и использоваться сразу после их появления, а приложения для анали­
за могут быть установлены и работать там, где это необходимо.
Один из проектов решения проблем технологии ведения «сетецентрического» боя - проект Common Link Integration Processing (CLIP) - имеет цель
разработать универсальное программное обеспечение и универсальный прото­
кол для использования в процессе создания общей сетевой инфраструктуры
для ВМС и ВВС США. Программа CLIP дает возможность существующим
системам вооружения, не имеющим каналов связи, и системам с несколькими
различными каналами связи взаимодействовать друг с другом.
В частности, на программу CLIP опирается проект включения в «сетецентрические» операции авиационного комплекса В-1В. Пользуясь проектом CLIP
с «дейтацентрическим» интерфейсом, экипаж В-1В может просто получить об­
новление курсовых данных по различным каналам связи. Аналогичную услугу
может получать и любой барражирующий авиационный комплекс ДРЛО.
Программа CLIP и другие аналогичные проекты после их внедрения по­
зволят боевым системам и отдельным средствам вооружения устанавливать на
поле боя связь друг с другом и обмениваться информацией. Их взаимодействие
будет основываться не на связи «точка-точка», а на работе распределенной се­
ти, в которой данные могут быть распознаны, получены и использованы лю­
бым средством, вошедшим в сеть.
Следует подчеркнуть, что для реализации концепции «сетецентрических»
боевых операций необходимо:
создать сеть, объединяющую сотни типов устройств в условиях сильно за­
грязненной (в том числе радиопомехами) внешней среды,
обеспечить создание новых и проведение модернизации существующих
устройств, которые будут работать в распределенной сети и обмениваться
данными,
внести коррективы в организацию разработки новых систем вооружения и
проектов по их модернизации, в соответствии с которыми разработчики долж­
ны иметь в виду еще и механизмы их интеграции в сеть,
принять жесткие меры по предотвращению несанкционированного досту­
па к создаваемой сети не только с целью выемки из нее информации, но и на­
рушения ее работы,
создать номенклатуру приложений на основе «дейтацентрических» архи­
тектур и открытых стандартов.
В приложении к АК РЛДН необходимо прежде всего:
разработать перечень стандартов, протоколов обмена информацией и уни­
версальных шин, обеспечивающих его включение в глобальную сеть;
увеличить число каналов связи с другими элементами сетецентрической
системы на базе широкополосных закрытых систем связи;
принять специальные меры по увеличению помехозащищенности всех из­
лучающих систем.
Выработка стратегии ведения «сетецентрических» операций с использова­
нием всех преимуществ, предоставляемых современными информационными
комплексами, - это важнейшая задача, требующая совместного участия боль­
шого круга специалистов. Одним из центральных мест в решении этой задачи
станет включение АК РЛДН в глобальную информационно-управляющую сеть,
что в свою очередь потребует решения ряда частных и общих задач, к реализа­
ции которых необходимо приступить уже в настоящее время.
8.8. Управление информационными возможностями
авиационного комплекса радиолокационного дозора
и наведения
Современные требования к АК РЛДН характеризуются увеличением объ­
емов решаемых задач и классов обнаруживаемых целей, необходимостью
взаимодействия с большим числом разнородных потребителей и огневых
средств вооруженной борьбы, которые предъявляют отличающиеся требования
к информативности комплекса (по дальности, точности, достоверности выда­
ваемой информации). Кроме того, важным требованием является повышение
эффективности применения АК РЛДН в прогнозируемой целевой и помеховой
обстановке, в том числе при обнаружении целей, выполненных по технологии
«Стеле», а также нестратегических ракетных средств нападения.
С учетом ограничений по типажу и стоимости создания АК РЛДН акту­
альным является разработка вариантов облика комплекса с управляемой в ди­
намике применения информативностью. Поэтому при обосновании облика АК
РЛДН проблемным вопросом является определение вариантов управления ин­
формационными возможностями, реализация которых обеспечивает адапта­
цию комплекса к изменяющимся требованиям потребителей и условиям его
применения в группировках видов ВС.
В связи с этим расширение информационных возможностей (ИВ) - одна из
устойчивых тенденций развития АК РЛДН [8-10]. Под расширением ИВ пони­
мается способность систем обработки радиолокационных сигналов извлекать все
больший объем информации из электромагнитных полей с улучшающимися
показателями достоверности, точности, разрешения и помехозащищенности.
Для достижения максимального эффекта применения комплексов данного
класса необходима реализация комбинированного управления АК РЛДН [44],
которое представляет собой взаимосвязанное многомерное управление как па­
раметрами и режимами его функционирования, так и параметрами движения
самолета-носителя.
Реализация управления ИВ АК РЛДН является многоплановой задачей,
содержащей целый комплекс взаимосвязанных проблем тактического, эконо­
мического и технологического планов, а также организационно-конструктор­
ских мер (рис. 6.1). В процессе решения этого комплекса задач при ограничен­
ных вычислительных и энергетических ресурсах в бортовых радиотехнических
комплексах возникает проблема управления информационными возможностя­
ми, в том числе и путем перераспределения этих ресурсов в рамках одного
АК РЛДН [6, 8], особенно в условиях РЭБ [9, 10].
В общем случае расширение ИВ, как минимум, предполагает следующее [8]:
использование многочастотных сложных зондирующих сигналов;
оптимизацию пространственно-временных показателей зоны ответствен­
ности;
использование более совершенных алгоритмов обработки сигналов, обес­
печивающих увеличение объема извлекаемой из них информации;
комплексирование бортовых датчиков различной физической природы в
рамках одного АК РЛДН;
расширение состава внешних источников информации;
повышение реальной информативности интерфейсов «человек (оператор) АК РЛДН»;
повышение эффективности способов и средств помехозащиты;
использование специальных траекторий носителей, обеспечивающих
улучшение тактических показателей РТК;
применение многопозиционного принципа построения АК РЛДН.
Использование многочастотных сложных зондирующих сигналов, база
которых существенно превышает единицу, дает возможность одновременно уве­
личить дальность обнаружения, улучшить разрешение по дальности и скорости и
точность их оценивания, а также скрытность и помехоустойчивость РТК.
Показатели скрытности улучшаются за счет того, что по своим проявле­
ниям спектры сложных широкополосных сигналов становятся подобными
спектрам белых шумов. Использование многочастотных зондирующих сигна­
лов позволяет не только снизить влияние угловых шумов целей, но и создать
трудности противоборствующей стороне в постановке прицельных помех. Не­
достатком использования сложных многочастотных сигналов являются услож­
нение алгоритмов первичной обработки сигналов и технологическая сложность
реализации приемопередающих трактов РТК.
Оптимизация пространственно-временных показателей зоны ответ­
ственности позволяет адаптировать временные и пространственные параметры
РТК под решаемую задачу и режим его работы. При этом оптимизация периода
обзора, времени облучения цели и времени когерентного накопления сигналов
уменьшает время завязки траекторий и повышает точность многоцелевого со­
провождения. Решение этой задачи, основанное на использовании программи­
руемого обзора на базе ФАР [4], дает возможность комплексировать процеду­
ры обзора и сопровождения в единый процесс, в рамках которого режим со­
провождения одной цели выполняется как частный случай многоцелевого
сопровождения.
В общем случае программируемый обзор позволяет управлять временным
интервалом обращения к цели в зависимости от степени ее важности. Для более
важных целей, в том числе новых и маневрирующих, период обращения к ним вы­
бирается существенно меньшим, чем к остальным целям в зоне ответственности.
Использование более совершенных алгоритмов обработки сигналов
базируется прежде всего на применении различных способов адаптации [36],
длительного когерентного накопления [39] и процедур многомерной фильтра­
ции [45]. Использование длительного когерентного накопления является сейчас
наиболее действенным способом увеличения дальности действия БРЛС АК
РЛДН. Использование многомерных фильтров [45] дает возможность сформи­
ровать оценки более высоких производных дальности, скорости сближения и
угловых координат, знание которых необходимо для реализации перспектив­
ных высокоточных методов наведения [29].
В рамках первичной обработки сигналов весьма перспективным направ­
лением является использование тонкого спектрального анализа при длитель­
ном когерентном накоплении, позволяющего получить новые сведения о цели,
недоступные при малых временах накопления.
В рамках вторичной обработки сигналов наибольший вклад в расширение
информативных возможностей вносят алгоритмы адаптивной аналогодискретной фильтрации с бесстробовой идентификацией измерений. Эти алго­
ритмы существенно улучшают разрешающую способность, увеличивают число
сопровождаемых целей и точность многоцелевого сопровождения, повышают
точность целеуказаний средствам поражения.
Комплексирование бортовых датчиков на борту АК РЛДН, обеспечи­
вающее одновременное улучшение показателей достоверности, точности, ус­
тойчивости сопровождения и помехозащищенности, основано на использова­
нии избыточной информации. При этом все более привлекательным становится
комплексирование радиолокационных датчиков, работающих в различных час­
тотных диапазонах. Наиболее приемлемым вариантом такого комплексирования, наилучшего по критерию «эффективность - вычислительные затраты», яв­
ляется объединение информации в рамках вторичной обработки сигналов.
Еще одним способом расширения информационных возможностей РТК
является использование внешних источников информации, среди которых
наиболее распространены спутниковые навигационные системы (СНС), назем­
ные РЛС, радиолокационные маяки, ведомые АК РЛДН и т. д. Следует под­
черкнуть, что информация от внешних источников может использоваться не
только для комплексирования с информацией бортовых измерителей, но и ав­
тономно для решения тех или иных задач управления, например, для посадки
летательных аппаратов по данным СНС и в условиях подавления своих инфор­
мационных систем.
Повышение информативности интерфейсов «человек - комплекс
РЛДН», среди которых наиболее распространенными являются различного ро­
да индикаторы, имеет две особенности. С одной стороны, для решения слож­
ных задач боевого применения требуется анализировать большой объем разно­
родной информации. С другой стороны, с учетом ограниченных психофизио­
логических возможностей человека (летчика, штурмана, оператора) объем этой
информации должен быть строго дозирован. В связи с этим весьма актуальна
задача предварительного отбора и дальнейшего представления информации в
наиболее простой и доступной форме. Одним их наиболее эффективных спосо­
бов решения этой задачи является использование интеллектуальных систем [3]
с выносом предлагаемых решений не только на индикаторы, но и при помощи
речевых сообщений.
Все возможные способы расширения информационных возможностей РТК
будут бесполезны, если не будет решена задача обеспечения его высокой по­
мехозащищенности. Причина этого состоит в существенно возросшей эффек­
тивности средств радиоэлектронного подавления [38]. Более подробно пробле­
мы помехозащиты обсуждались в главе 4.
Многообещающим направлением расширения информационных возможно­
стей РТК является использование траекторного управления наблюдением,
основанного на применении таких траекторий полета самолета-носителя АК
РЛДН и наводимых ЛА, при которых реализуются наилучшие условия для ра­
диолокационного наблюдения [30]. Такие условия обеспечиваются за счет до­
полнительного изменения спектрального состава отраженного сигнала в процес­
се его вторичной модуляции, возникающей в момент переотражения. Использо­
вание этого явления дает возможность одновременно улучшить разрешающую
способность, точность, помехозащищенность при весьма незначительной дора­
ботке существующих алгоритмов обработки сигналов. Следует подчеркнуть, что
такие траектории полета позволяют ухудшить показатели РТК противника:
уменьшить дальность их обнаружения, ухудшить разрешение и точность [25].
Использование многопозиционных радиолокационных систем (МПРЛС)
[35,43] наряду с расширением информативных возможностей РТК одновре­
менно повышает и его живучесть. Преимущества МПРЛС по сравнению с
Авиационные комплексы радиолокационного дозора и наведения
однопозиционными системами обусловлены возможностью извлечения допо^
нительной информации, заключенной в пространственной структуре электро
магнитного поля. Особенно существенные преимущества можно получить 1
МПРЛС в составе нескольких АК РЛДН в режиме «ведущий-ведомый» за сче1
целенаправленного управления отдельными позициями.
Функционально-логические связи между различными направлениями це
ленаправленного увеличения ИВ и системными показателями РТК приведень
на рис. 8.25.
Рис. 8.25
Необходимо подчеркнуть, что управление информационными возмож­
ностями может осуществляться на всех уровнях обработки информации в рам­
ках первичной, вторичной и третичной обработок. При этом управление может
быть направлено как на улучшение конкретных показателей РТК, так и на уве­
личение объема информации, извлекаемой из радиосигналов.
Среди приемов, в комплексе решающих эти задачи, необходимо прежде
всего выделить длительное когерентное накопление, управление параметрами
зоны обзора, управление средствами помехозащиты, траекторное управление
наблюдением и использование многопозиционного принципа построения РТК.
Управление процедурами длительного когерентного накопления дает воз­
можность управлять дальностью обнаружения целей РТК и, соответственно,
скрытностью его работы. Кроме того, управление алгоритмами детального
спектрального анализа дает возможность выделять составляющие спектра, обу­
словленные вращением турбин двигателя [28], что позволяет однозначно иден­
тифицировать тип цели и выполнять всепогодное обнаружение пуска ракет ра­
диолокационными средствами. Необходимо, однако, отметить, что все инфор­
мационные преимущества, получаемые при длительном когерентном
накоплении, могут быть реализованы лишь при учете в алгоритмах первичной
обработки составляющих ускорений цели [25].
Управление пространственно-временными параметрами зоны обзора
сводится к решению ряда противоречивых проблем: согласованию сектора
просмотра зоны ответственности и дальности действия; выбору направления и
времени зондирования; согласованию времени облучения цели, времени коге­
рентного накопления, а также выбору рациональной формы диаграммы на­
правленности.
Целенаправленное решение этих задач связано с управлением режимами
работы РТК, управлением мощностью излучаемого сигнала и стратегией про­
смотра зоны ответственности при многоцелевом сопровождении. Такое
управление позволяет повысить скрытность работы РТК, уменьшить время за­
вязки траекторий, повысить достоверность и точность измерений. Необходимо
отметить, что наиболее полно реализовать требуемые показатели просмотра
зоны ответственности можно только при цифровых АФАР с комплексом при­
кладных программ, дающих возможность реализовать все их преимущества.
Весьма перспективным направлением одновременной оптимизации про­
цедур обзора, облучения цели, накопления сигналов и обнаружения является
использование алгоритмов статистической теории оптимального управле­
ния, обеспечивающих просмотр зоны ответственности по принципу минимума
математического ожидания неопределенности оценки целевой обстановки. При
таком подходе оптимальное управление сводится к первоочередному наблюде­
нию той угловой позиции, где по результатам предыдущего наблюдения ожи­
дается минимальное убывание неопределенности [4].
Эффективное управление средствами помехозащитны, подразумевают
управление как скрытностью, так и помехоустойчивостью, предполагает пр
менение пассивных режимов работы РТК и приемов так называемой активы!
помехозащиты, основанной на игровых способах с использованием собстве
ных средств радиоэлектронного подавления и активных режимов функциой
рования комплекса.
В свою очередь управление скрытностью обеспечивается комплексом о
ганизационно-технических мер, среди которых наиболее важным направлен
ем является управление мощностью излучения, адаптированное под тип цел
дальности до нее и режим работы РТК. Второе важное направление - бол
широкое использование режимов экстраполяции.
Траекторное управление наблюдением [20] сводится к разработке единт
алгоритмов управления режимами работы РТК и траекторий полета самоле!
носителя АК РЛДН. При этом траектории полета носителя автоматичес]
адаптируются под режим работы РТК, максимизируя его приоритетные так в
зываемые тактические показатели.
Наиболее многообещающим приемом, обеспечивающим наряду с увел
чением ИВ улучшение тактических показателей РТК и его живучести, являет
многопозиционный принцип построения.
Возможность динамического управления взаимным пространственнь
положением позиций и скоростью его изменения многократно улучшает пок
затели разрешения, точности и помехозащищенности РТК. Кроме того, варь
руя активными и пассивными режимами работы РТК-позиций, можно сущее
венно повысить показатели боевой эффективности и живучести [11].
Необходимо, однако, подчеркнуть, что при несомненных преимущества
использование многопозиционного принципа построения приводит к сущее
венному усложнению алгоритмов функционирования АК РЛДН как за счет π
явления более высокого иерархического управленческого уровня, так и за сч
усложнения алгоритмов взаимной синхронизации, алгоритмов отождествлен]
результатов первичных измерений и формирования оценок дальности, скор
сти и угловых координат.
С учетом вышеизложенных вариантов управления конкретизируем зад
чу управления АК РЛДН [6] в динамике применения комплекса.
Пусть многоканальный (по числу измерительных каналов и объектов обн
ружения и сопровождения) АК РЛДН SK последовательно (параллельно) во вр
мени взаимодействует с несколькими разнородными потребителями, предъя
ляющими отличающиеся требования (Vn, VT2 ,..., VTKp) к получаемой инфо
мации (по рубежам обнаружения R, точности оху, достоверности Щ
продолжительности непрерывного сопровождения целей Тс, дискретности BI
даваемой информации Т0 и др.). Данный комплекс функционирует в измени!
щихся внешних условиях работы и имеет ограниченный располагаемый i
ресурс (по энергетике, вычислительным мощностям, допустимому диапазону
изменения параметров информативности и др.). Необходимо сформировать в
динамике применения многомерное управление U процессом функционирова­
ния его бортовым РТК и параметрами движения самолета-носителя ΨΗ, VH,
обеспечивающее максимальное соответствие реализуемых характеристик Vx их
требуемым значениям.
При многокритериальной постановке задачи синтеза управления информа­
тивностью АК РЛДН, взаимодействующих с разнородными потребителями ин­
формации, имеется многопараметрическая неопределенность относительно зна­
чений выбираемых управляемых параметров. Для снижения размерности задачи
проводятся ее декомпозиция [37] на составляющие и учет различных динамиче­
ских свойств применяемых механизмов управления. Это позволяет определить
реализуемые стратегии управления для выбранного перечня потребителей, учи­
тывая различные динамические свойства и влияние на показатели информатив­
ности выбранных траекторий полета самолета-носителя (V nb ..., V^) и режимов
(frb '··, frn2) функционирования его бортового РТК.
Целевой функцией Еп при определении стратегии управления U во вре­
мени является эффективность применения АК РЛДН при изменении как пе­
речня обеспечиваемых потребителей ξι, так и параметров целевой и помеховой обстановки ξ2 в зоне его действия. На практике вследствие сложности и
многообразия моделей потребителей явный вид функций Е п ( V x ) , как прави­
ло, неизвестен и зависит от вариантов изменения ξ1 (t)x ξ2 (t) внешней обста­
новки. Поэтому для получения искомых решений применим сконструирован­
ные ранее целевые функции (обобщенные показатели W c i ), а также меры ве­
роятностных гарантий (вероятности выполнения требований к информации
Ρ Β Τ = Ρ Γ ( ν χ € Ω ( ^ ( Υ 3 ) ) V V x e Q ( ^ ( Y 3 ) | E n ( V x ) > Y 3 ) ) , рассчитанных при
фиксированных значениях уровней Υ 3 эффективностей Е п обеспечиваемых
потребителей.
Для бортового РТК АК РЛДН составляющие вектора Wc определяются
координирующей траекторией U Ki (вектором YTi относительно изменяю­
щихся требований к выдаваемой информации) и рассчитываются при задан­
ном уровне эффективности (Y 3 i ) разнородных потребителей с учетом пред­
полагаемых к реализации режимов и возможных (прогнозируемых) парамет­
ров внешних условий {Ъ,^ εΩξ) работы. Тогда искомая оценка вероятности
выполнения требований определяется путем интегрирования восстановлен­
ие)
ных совместных плотностей распределения wv ' частных характеристик
вектора Yp:
где
- вектор реализуемых характеристик выходного информационного по­
тока для установившегося режима работы;
- область допустимых
значений данных характеристик, обеспечивающих заданный уровень эффек­
тивности i-ro потребителя.
Последовательность предлагаемого метода формирования дискретного
многомерного управления
информативностью АК РЛДН в интересах
эффективного обеспечения разнородных потребителей иллюстрирует рис. 8.26.
При таком подходе одновременно учитываются коррелированность характери­
стик информативности при «включении» различных механизмов управления,
изменяющиеся условия целевой и помеховой обстановки в зоне действия
АК РЛДН, влияние на показатели информативности не только выбранных ре­
жимов функционирования его бортового РТК, но и параметров движения са­
молета-носителя .
Для организации динамического управления информативностью на этапе
формирования облика и проектирования АК РЛДН необходимо обеспечить
следующее:
формирование подмножества показателей эффективности, взаимодейст­
вующих с комплексом потребителями. При задании конкретного вида функ­
ций эффективности
действий κΣΡ потребителей по
обеспечиваемой информации должно быть определено представительное
множество характеристик информативности (V x ), влияющих на значения
данных показателей;
решение обратных задач определения требуемых значений характеристик
ВИП
для заданного уровня эффективности Е3 и образующих парето-множество неулучшаемых решений;
определение подмножества задач разведывательно-информационного
обеспечения и потребителей, связанных с ними, классифицируемых по отли­
чающимся требованиям к информативности. При этом конечное подмножество
потребителей
характеризуется предъявлением
отличающихся требований к выдаваемой информации по совокупности
учитываемых характеристик ВИП.
На этапе формирования облика АК РЛДН разрабатываются и реализуются
специальные режимы функционирования его бортового РТК в интересах дина­
мического управления его информативностью.
Рис. 8.26
При формировании на этапе проектирования управляемых режимов функ­
ционирования существуют неопределенности условий взаимодействия АК РЛДН
с потребителями, динамики изменения параметров воздушной и помеховой об­
становки и ошибок их идентификации. Поэтому в интересах обоснования ми­
нимально достаточного множества специальных режимов функционирования
АК РЛДН из исходного множества альтернатив технически реализуемых ре­
жимов Ωρ необходимо решить следующую задачу:
где
- выбранная система предпочтений;
множество ошибок идентификации в комплексе для прогнозируемых внешних
условий
, ограниченное возможностями технической реализации.
Учитывая требование многофункциональности S K , для задания г исполь­
зуем
принцип
доминирования
по
векторному
показателю
, элементы которого от­
ражают качество решения информационных задач пт в интересах заданного
перечня потребителей. Тогда процесс формирования
исходного множества альтернатив можно определить как
С учетом фактических ошибок
бор элементов
на основе
идентификации внешних условий вы­
необходимо осуществлять следующим образом:
Здесь матрица
определяет допустимый уход ошибок оценки пара­
метров, не влияющих на правомерность выбора альтернатив, а подмножество
характеризует прогнозируемые степени определенности знаний
о параметрах внешних условий работы на различных (к+1)-этапах применения.
При таком подходе к формированию управляемых режимов обеспечиваются
условная оптимизация «текущего» режима при сравнительно «точной» иден­
тификации ξΤΗ параметров внешних условий работы и реализация принципа
гарантированного результата при «грубой» идентификации ξΓΗ условий в про­
тивном случае.
Динамическое управление информативностью АК РЛДН на этапе при­
менения в соответствии с введенными операциями 3-7 (рис. 8.26) осуществ­
ляется следующим образом. Пусть на заданном интервале дискрета
определен вектор требуемых характеристик информативности
соответственно по рубежам обнаружения заданно­
го класса целей, требуемому времени их непрерывного сопровождения, точно­
стным характеристикам и коэффициенту ложных трасс, который является ко­
ординирующим вектором, задающим требуемый режим функционирования АК
РЛДН. Тогда при представлении комплекса исполнительным механизмом мно­
гоканальной следящей системы, отрабатывающим заданное координирующее
управление, получим реализуемую структуру функционирования комплекса с
управляемой информативностью (рис. 8.27).
Рис. 8.27
При наличии ресурсных ограничений (по энергетике, располагаемом вре­
менном и вычислительном ресурсах бортового РТК, ограничениям на измене­
ние управляемых параметров и др.) в комплексе и существенно нелинейной за­
висимости реализуемых характеристик ВИП от значений изменяемых парамет­
ров может обеспечиваться только частичная управляемость комплекса, когда
значения управляемых величин
не достигают заданных значений
в надсистеме. Такой режим работы в условиях реального функциони­
рования является наиболее характерным.
Поэтому формирование координирующего управления
учи­
тывающего располагаемый ресурс для управления информативностью, являет­
ся необходимым условием реализации потенциальных разведывательноинформационных возможностей. Это достигается путем адаптивной коррекции
изменяющегося дискретно в надсистеме вектора требований, обеспечивающеего соответствующую координацию функционирования бортового РТК и
влияющего на «включаемые» режимы его функционирования.
Решение данной задачи для каждого j-ro варианта применения к бортово­
му РТК сводится к нахождению скорректированного вектора требований
, обеспечивающего одновременно реализацию управляемости
информативностью комплексом и максимизацию обобщенного показателя WJ:
при объективно существующих ограничениях на изменение характеристик
соответствует установившемуся режиму
функционирования.
Искомый скоректированный вектор требований, определяющий значения
координирующего управления бортовым РТК, определяется как
где
- вектор реализуемых характеристик ВИП, вычисляемый посред­
ством решения векторно-матричных уравнений, описывающих подпространство
состояний бортового РТК и определяющих динамические свойства комплекса
при управлении его режимами. Матрица Cj характеризует связь текущих пере­
менных состояния комплекса Xj с частными характеристиками выдаваемой ин­
формации и влияющими на конечную эффективность в j-м варианте примене­
ния;
- вектор, элементы которого определяют максимальные возмож-
ности по коррекции характеристик ВИП с учетом имеющегося в распоряжении
энергетического и вычислительного ресурсов (ΔΡ3: =Р 3 ; - Р 3 ; ( 0 ) , где Рз;(0) —
расходуемый ресурс РТК в начальный момент времени, P3j — общий ресурс РТК
для решения j -й задачи). В результате данного представления поставленная за­
дача сводится к определению элементов вектора
где
- вектор, характеризующий потенциально достижимое изменение ха­
рактеристик ВИП за счет «включения» соответствующих механизмов управле­
ния в бортовом РТК.
При таком подходе не только задается требуемая динамика функциониро­
вания АК РЛДН, но и учитывается различный вклад отдельных характеристик
информативности комплекса в эффективность информационного обеспечения
заданного перечня разнородных потребителей.
Дискретное управление АТУ режимами Ω* функционирования РТК
основывается
, заданными и внедренными на этапе формирования облика S K ,
на проведении двухэтапной динамической оптимизации
где ΔΤρ — располагаемый временной
ресурс) комплекса в переходном режиме и на последующем достижении мак­
симальной вероятностной гарантии
конфликтноустойчивого функционирования в установившемся режиме работы. Особенно­
стью является то, что реализуемая дискретность изменения режимов функцио­
нирования будет переменной
и определяется изменением в перечне
обеспечиваемых потребителей идентифицируемыми параметрами внешней об­
становки, а также складывающимися условиями пространственно-временной
координации решаемых задач и этапов применения АК РЛДН.
Модель динамики в пространстве переменных состояния X управляемого
стохастического объекта, состоящего из множества подсистем, адекватно опи­
сывается в непрерывной форме уравнением Ланжевена [41]:
получение и исследование которого в общем виде для многомерного сущест­
венно нелинейного случая представляет неразрешимую задачу.
Поэтому на первом этапе для учета отличий в инерционности используе­
мых механизмов управления предложена динамическая модель управляемого
процесса формирования информационных потоков, основанная на различных
вариантах композиции разностных уравнении состояния отдельных подсистем
РТК с выделенными аддитивными составляющими реализуемых управляющих
воздействий в каждом из них:
. При введении nNC управляемых
подсистем их динамические свойства для фиксируемых внешних условий ра­
боты из-за требований по вычисляемости оптимального управления необходи­
мо представлять по результатам идентификации различными системами разно­
стных уравнений состояния.
При существенной коррелированности характеристик ВИП в многосвяз­
ном объекте, которым является бортовой РТК, а также противоречивости влия­
ния на них физически реализуемых механизмов управления с учетом эквива­
лентности решение по окончательно выбираемой стратегии сводится к дис­
кретному управлению режимами функционирования комплекса.
Для многомерного случая при допущении оптимальности формируемой
траектории полета
введем в ограничивающие извест­
ные параметры объекта параметры полета его самолета-носителя. Тогда иско­
мое управление информативностью комплексом должно обеспечить макси­
мальное соответствие М(С) реализуемых и требуемых характеристик ВИП при
изменении перечня обеспечиваемых потребителей
и стабилизацию характеристик выдаваемой информации при эволюции пара­
метров ξ2 целевой и помеховой обстановки:
где
- подмножество (вектор) представительных характеристик ин­
формативности, определяемых только «включаемыми» режимами и парамет­
рами бортового РТК; δ - бесконечно малое число.
В качестве критерия выбора текущего режима функционирования предла­
гается использовать максимизацию вероятности выполнения требований РВт:
(8.41)
где
- допустимая область изменения (рассогласования) характеристик
ВИП, соответствующая заданному уровню Υ3 эффективности.
Вследствие высокой динамичности параметров внешних условий и необ­
ходимости учета их влияния на эффективность взаимодействия с потребителя­
ми требуется преобразование (8.41) к минимаксному критерию:
обеспечивающему гарантированное улучшение информативности РТК при из­
менении режимов работы.
Определим множество вероятностей
как
для временного интервала, соответствующего установившемуся
процессу функционирования.
В соответствии с условием (8.41) выбираем из полученного множества оп­
тимальный (квазиоптимальный) режим fr , обеспечивающий гарантированный
максимум эффективности взаимодействия бортового РТК с разнородными по­
требителями при наиболее сложных условиях применения.
Рассмотрим практически реализуемые на современном этапе развития ме­
ханизмы управления информативностью АК РЛДН (рис. 8.28) при построе­
нии многорежимного РТК с различными режимами зондирования (квазинепре­
рывное излучение с несколькими переключаемыми частотами повторения, ква­
зинепрерывное излучение с «медленным» (от обзора к обзору и более)
переключением частот повторения импульсов («гладкий» режим), низкочас­
тотный режим излучения со сжатием ЛЧМ-сигнала) и обработки (с изменяе­
мым порогом обнаружения, критериями захвата, сброса траекторий с сопрово­
ждения, а также вариантами селекции, фильтрации и объединения измерений
БРЛС и др.).
В качестве альтернативы режиму КНИ с несколькими частотами повторе­
ния импульсов (ЧПИ) с учетом пространственно-временной изменяемости ха­
рактеристик информативности можно использовать «гладкий» режим с пере­
ключением ЧПИ от оборота к обороту антенны или реже. Этот режим не обес­
печивает снятие неоднозначности измерения по дальности. Однако
потенциально «гладкий» режим имеет определенные энергетические преиму­
щества и связанные с ним возможности сверхдальнего обнаружения, в частно­
сти групповых целей.
Рис. 8.28
Для повышения качества РЛИ при работе по плотным многочисленным
группам над «легкими» покровами подстилающей поверхности можно исполь­
зовать низкочастотный режим излучения (НЧ-с) импульсов со сжатием прини­
маемых сигналов, реализующий однозначное измерение дальности вплоть до
радиогоризонта. Для сохранения средней мощности излучения по сравнению с
ВЧПИ-ш предполагается формирование импульсов с большой длительностью,
а для обеспечения требований по разрешающей способности использование
внутриимпульсной модуляции. При этом управление режимами зондирования
может организовываться от подсистемы вторичной обработки радиолокацион­
ной информации, что позволяет повысить устойчивость автосопровождения
целей, попадающих в зону режекции.
Управление детализацией выдаваемой воздушной обстановки с различной
степенью укрупнения информации (за счет группирования информации) по­
зволяет улучшить полноту и достоверность выдаваемой информации в секто­
рах с повышенной плотностью отметок. При этом происходит снижение по­
грешности оценки координат и ошибок определения скорости и курса целей,
что требует учета изменяющихся требований к информативности потребителей
комплекса при формировании стратегии управления.
Литература
1. Антипов В.Н., Исаев С.Α., Лавров Α.Α., Меркулов В.И. Многофункциональные радиолокаци­
онные комплексы истребителей. - М.: Воениздат, 1994.
2. Бабич В.К., Баханов Л.Е., Карпеев В.И. и др. Авиация ПВО России и научно-технический
прогресс. Боевые комплексы и системы вчера, сегодня, завтра / Под ред. Е.А. Федосова. М.: Дрофа, 2001.
3. Бортовые интеллектуальные системы. Авиационные системы. - Информационно-измери­
тельные и управляющие системы, 2006, т. 4, № 8.
4. Васильев О.В., Меркулов В.И, Карев В.М. Управляемый радиолокационный поиск воздушных
целей. - Зарубежная радиоэлектроника. Успехи современной радиоэлектроники, 2002, № 1.
5. Верба B.C. Авиационный комплекс радиолокационного дозора и наведения как элемент гло­
бальной сетецентрической системы. - Радиотехника, 2008, № 9.
6. Верба B.C. Метод управления информативностью авиационного комплекса, взаимодейст­
вующего с разнородными потребителями информации. - Радиотехника, 2006, № 1.
7. Верба B.C. Обнаружение наземных объектов. Радиолокационные системы обнаружения и на­
ведения воздушного базирования. - М.: Радиотехника, 2007.
8. Верба B.C. Управление информационными возможностями многофункциональных бортовых
радиолокационных комплексов. - Радиотехника, 2007, № 10.
9. Верба B.C., Вакуленко Α.Α., Дод В.Н. Принципы управления многофункциональными интег­
рированными радиоэлектронными системами в динамике конфликта со средствами радио­
электронного подавления. - Радиотехника, 2008, № 8.
10. Верба B.C., Вакуленко Α.Α., Дод В.Н. Организация конфликтно-устойчивого управления ин­
тегрированной радиоэлектронной системой в динамике конфликта со средствами радиоэлек­
тронного подавления. - Радиотехника, 2006, № 1.
11. Верба B.C., Гандурин В.А., Меркулов В.И. Живучесть авиационных комплексов радиолокаци­
онного дозора и наведения. - Информационно-измерительные и управляющие системы, 2008,
т. 6,№3.
12. Верба B.C., Гандурин В.А., Меркулов В.И. Стратегические, оперативные и тактические факто­
ры, влияющие на облик авиационного комплекса радиолокационного дозора и наведения. Информационно-измерительные и управляющие системы, 2008, т. 6, № 5.
13. Верба B.C., Гандурин В.Α., Меркулов В.И. Экономические факторы, влияющие на облик авиа­
ционного комплекса радиолокационного дозора и наведения. - Информационно-измери­
тельные и управляющие системы, 2008, т. 6, №7.
14. Верба B.C., Меркулов В.И., Самарин О.Ф. Технологические факторы, влияющие на облик
авиационного комплекса радиолокационного дозора и наведения. - Информационно-измери­
тельные и управляющие системы, 2008, т. 6, № 10.
15. Викулов О.В., Добыкин В.Д., Меркулов В.И. и др. Современное состояние и перспективы раз­
вития авиационных средств радиоэлектронной борьбы. - Зарубежная радиоэлектроника.
Успехи современной радиоэлектроники, 1998, № 12.
16. Гандурин В.А., Кирсанов А.П. Особенности зоны обнаружения низколетящих воздушных
объектов доплеровской радиолокационной станции. - Радиотехника, 2007, № 10.
17. Гандурин В.Α., Меркулов В.И. Проблемы повышения скрытности наведения авиационных
комплексов. - Фазотрон, 2008, № 1,2.
18. Гордон X. Реализация систем для ведения «сетецентрических» войн. - Мир компьютерной
автоматизации: мир встраиваемых компьютерных технологий, 2007, № 6.
19. Горощенко Л.Б. Пути реализации координированного наведения и атаки несколькими истре­
бителями группы самолетов противника. - Полет, 2000, № 10.
20. Григорьев Ф.Н., Кузнецов Н.А., Серебровский Л.П. Управление наблюдением в автоматиче­
ских системах. - М.: Наука, 1986.
21. Дрогалин В.В., Ефимов В.Α., Меркулов В.И. и др. Алгоритмы оценивания координат и пара­
метров движения радиоизлучающих целей в угломерных двухпозиционных бортовых радио­
локационных системах. - Информационно-измерительные и управляющие системы, 2003, № 1.
22. Дрогалин В.В., Ефимов В.А., Меркулов В.И. и др. Способы оценивания точности определения
местоположения источников радиоизлучения пассивной угломерной двухпозиционной бор­
товой радиолокационной системой. - Успехи современной радиоэлектроники, 2003, № 8.
23. Дрогалин В.В., Меркулов В.И, Чернов B.C. и др. Определение координат и параметров дви­
жения источников радиоизлучения по угломерным данным в однопозиционных бортовых ра­
диолокационных системах. - Зарубежная радиоэлектроника. Успехи современной радиоэлек­
троники, 2002, № 3.
24. Зуенко Ю., Коростелев С. Боевые самолеты России. - М.: Элакос, 1994.
25. Ильчук А.Р., Меркулов В.И, Юрчик И.А. Особенности обнаружения сигналов в бортовых РЛС
при наблюдении интенсивно маневрирующих целей. - Радиотехника, 2004, № 10.
26. Канащенков А.И., Меркулов В.И., Самарин О.Ф. Многопозиционные радиолокационные сис­
темы воздушного базирования. Возможности и ограничения. - Радиотехника, 2008, № 9.
27. Кондратенков ГС, Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционно­
го зондирования Земли / Под ред. ГС Кондратенкова. - М.: Радиотехника, 2008.
28. Макаев В.Е., Васильев О.В. Метод радиолокационного распознавания воздушной цели по
турбинному эффекту. - Радиотехника, 2000, № 1 1 .
29. Меркулов В.И. Радиоэлектронные системы управления самолетом и оружием: учебник для
слушателей и курсантов инженерных ВВУЗов ВВС. - М.: ВВИА им. проф. Н.Е. Жуковского,
2001.
30. Меркулов В.И. Улучшение разрешающей способности бортовой РЛС по углу путем траекторного управления наблюдением. - Радиотехника, 2003, № 1.
31. Меркулов В.И. Управление пассивными двухпозиционными РЛС в режиме наведения на радиоизлучающую воздушную цель. - Радиотехника, 2008, № 6.
32. Меркулов В.И., Харьков В.П. Оптимизация радиоэлектронных систем управления. Методы и
алгоритмы оптимального управления. - Радиотехника, 1998, № 9.
33. Меркулов В.И., Харьков В.П., Чернов, B.C. Алгоритмы управления позициями в пассивной
двухпозиционной РЛС. - Радиотехника, 2004, № 10.
34. Меркулов В.И., Чернов B.C., Гандурин В.А. и др. Авиационные системы радиоуправления :
учебник для военных и гражданских ВУЗов. - М.: ВВИА им. Н.Е. Жуковского, 2008.
35. Меркулов В.И., Чернов B.C., Юрчик И.А. Авиационные многопозиционные системы радио­
управления. - Успехи современной радиоэлектроники, 2006, № 12.
36. Первачев СВ., Перов А.И. Адаптивная фильтрация сообщений. - М.: Радио и связь, 1991.
37. Петров А.В., Яковлев А.А. Анализ и синтез радиотехнических комплексов / Под ред. В.Е. Дулевича. - М.: Радио и связь, 1984.
38. Перунов Ю.М., Фомичев В.И., Юдин Л.М. Радиоэлектронное подавление информационных
каналов систем управления оружием / Под ред. Ю.М. Перунова. - М.: Радиотехника, 2003.
39. Родзивилов В.И., Черных М.М., Кузубов В.В. и др. Когерентное последовательное обнаруже­
ние в импульсно-доплеровских РЛС. - Радиотехника, 1994, № 4.
40. Самарин О.Ф., Соловьев А.А, Шарова Т.В. Радиолокационные системы многофункциональ­
ных самолетов. Т. 3. Вычислительные системы РЛС многофункциональных самолетов / Под
ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2007.
41. Справочник по теории автоматического управления / Под ред. А.А. Красовского. - М.: Наука,
1987.
-42. Федосов Е.А. Реализация сетецентрической технологии ведения боевых действий потребует
создания БРЛС нового поколения. - Фазотрон, 2007, № 1,2.
43. Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993.
44. Ягольников СВ., Вайпан С.Н. Принципы комбинированного управления разведывательноинформационными возможностями подвижного радиотехнического комплекса, функциони­
рующего в условиях ресурсных и информационных ограничений. - Радиотехника, 1997, № 1 1 .
45. Ярлыков М.С, Миронов М.А. Марковская теория оценивания случайных процессов. - М.:
Радио и связь, 1993.
ЗАКЛЮЧЕНИЕ
Монография является первой в отечественной научной литературе книгой,
посвященной анализу современного состояния и развития авиационных систем
радиолокационного дозора и наведения.
На основе концептуального подхода рассмотрен весь круг задач, решае­
мых системами РЛДН в настоящее время и в процессе модернизации и разви­
тия авиационных информационно-управляющих комплексов.
Показана возрастающая роль комплексов РЛДН как многофункциональ­
ного авиационного комплекса, решающего многочисленные задачи разведки и
управления в интересах всех видов ВС, а также пограничной службы, службы
наркоконтроля, контроля чрезвычайных ситуаций. Такие комплексы будут ча­
стью общегосударственной информационной системы.
Рассмотрена структура комплекса, состоящая из БРЛС, системы активного
запроса-ответа, систем РТР, госопознавания и связи, телекодовой аппаратуры,
цифрового вычислительного комплекса, системы отображения информации и
комплекса индивидуальной защиты самолета.
На примере систем АВАКС, АК РЛДН и Хокай дан анализ принципов по­
строения основной информационной системы комплекса - БРЛС.
Приведены основные характеристики элементов радиолокационного трак­
та и показана их зависимость от длины волны (ЭПР и фазовые характеристики
воздушных, надводных и наземных целей, а также земной и водной поверхно­
стей, характеристики среды распространения, антенных и приемо-передающих
систем). Обоснована структура алгоритмов решения задач обнаружения, изме­
рения координат и сопровождения целей.
Исследованы основные направления совершенствования технического об­
лика БРЛС: использование АФАР большой площади и средней мощности; пе­
реход в длинноволновый (L-P)- диапазоны; длительное время когерентного на­
копления отраженных сигналов; использование широкополосных сигналов, ме­
тодов синтезирования апертуры антенны и многопозиционных режимов;
обеспечение программируемого обзора; устранение «мертвых» зон обзора; ис­
пользование мощных процессоров сопровождения нескольких тысяч объектов;
интеллектуальная поддержка операторов; модульная открытая архитектура;
глубокая автоматическая полётная и послеполетная диагностика (до модуля).
Рассмотрены особенности построения и функционирования систем наве­
дения одиночных и групп истребителей-перехватчиков на воздушные цели.
Обоснованы главные направления развития систем наведения. Исследова­
ны алгоритмы наведения на наземные и высокоманевренные воздушные цели,
рассмотрены приемы скрытного наведения.
Определены перспективные системы управления групповыми действиями,
в том числе с использованием комбинированного способа и многопозиционно­
го наведения.
Рассмотрена динамика развития отечественных и зарубежных комплексов
РЛДН, их тактико-технических характеристик и технического облика. На при­
мере программы Е-10А (США) показано планирование модернизации и разра­
ботки авиационной многоплатформенной интегрированной системы управле­
ния и контроля МС2А как центральной части единой системы управления бое­
выми действиями ВМС2.
Дан критический анализ комплексов МЕСА, Фалкон, АРГУС, Хокай-2000
и комплексов, базирующихся на аэростатах и дирижаблях, а также структуры и
ТТХ их систем (БРЛС, связи, радиоуправления, госопознавания и индивиду­
альной защиты).
Изложены концептуальные подходы к проблемам управления информаци­
онными возможностями АК РЛДН и его использованию в составе глобальных
сетецентрических информационно-управляющих систем.
423
Перечень сокращений
AK
- авиационный комплекс
АКРЛДН
- авиационный комплекс радиолокационного дозора
и наведения
АКП
- автокомпенсатор помех
AM
- амплитудная модуляция
ΑΠΟ
- анализатор помеховой обстановки
АРМ
- автоматизированное рабочее место
АРУ
- автоматическая регулировка усиления
АСУ
- автоматизированная система управления
АСЦРО
- автоматическое сопровождение целей в режиме
обзора
АФАР
- активная фазированная антенная решётка
АЦП
- аналого-цифровой преобразователь
АШП
- активная шумовая помеха
БВС
- бортовая вычислительная система
БД
БКСС
— база данных
БЛА
- беспилотный летательный аппарат
БМП
- боевая машина пехоты
БН
- бортовое наведение
БП
- бортовой поиск
БПФ
- быстрое преобразование Фурье
БРЛС
- бортовая радиолокационная система
БСУН
- бортовая система управления наведением
БУ
- бортовое управление
БЦВМ
- бортовая цифровая вычислительная машина
БЦВС
- бортовая цифровая вычислительная система
ВАРУ
- временная автоматическая регулировка усиления.
«в-в»
- воздух-воздух
- бортовой комплекс средств связи
вип
вкп
во
вп
- выходной информационный поток
- воздушный командный пункт
«в-п»
- воздух-поверхность
впо
впп
- воздушно-помеховая обстановка
ВС
- вооружённые силы
ВТО
- высокоточное оружие
ВЦ
- воздушная цель
вчп
- высокая частота повторения
ГАФАР
- гибридная АФАР
- вторичная обработка
- вращающийся переход
- взлетно-посадочная полоса
гд
- групповые действия
ГЗЛА
- гиперзвуковой летательный аппарат
ген
дд
- головка самонаведения
ДН
ДНА
- диаграмма направленности
Дол
- доплеровское обострение луча
ДПЛА
- дистанционно пилотируемый летательный аппарат
дпен
- двухпозиционные системы наведения
ДПРЛС
- двухпозиционная РЛС
ДПФ
- дискретное преобразование Фурье
ДРЛОиУ
- дальнее радиолокационное обнаружение
и управление
ЗАС
- засекречивающая аппаратура связи
ЗПС
- заданная полусфера
- динамический диапазон
- диаграмма направленности антенны
ЗРК
- зенитный ракетный комплекс
ЗРС
- зенитная ракетная система
ЗУР
- зенитная управляемая ракета
ИА
- истребительная авиация
ИВ
- информационные возможности
ид
ик
инс
- информационный датчик
- инфракрасный
- инерциальная навигационная система
ИРИ
ИРСА
- источник радиоизлучения
- инверснная РСА
ИТО
- индикатор тактической обстановки
ИУС
— информационно-управляющая система
иц
- излучающая цель
KB
- короткие волны
кг
- командир группы
КИМ
- кодоимпульсная модуляция
кмо
кн
кнд
кни
ког
кос
кп
- ковариационная матрица ошибок
КР
- крылатая ракета
КРМБ
- крылатая ракета морского базирования
- командное наведение
- коэффициент направленного действия
- квазинепрерывное излучение
- командир объединенной группы
- корреляционная обратная связь
- командный пункт
КРУ
- командная радиолиния управления
ЛА
- летательный аппарат
ЛБР
- лица боевого расчета
лв
лз
- линия визирования
- линия задержки
МАК
- многофункциональный авиационный комплекс
МАУ
- массированный авиационный удар
МБРЛС
- многофункциональная бортовая радиолокационная
станция
МБРТК
- многофункциональный бортовой радиотехнический
комплекс
МЛАР
- многолучевая антенная решётка
МНЦ
- малоразмерная наземная цель
МПРЛС
- многопозиционная радиолокационная система
МПСН
- многопозиционная система наведения
МШУ
- малошумящий усилитель
нзск
нлц
- неподвижная земная система координат
- низколетящая цель
НРСН
нчп
- нестратегические ракетные средства нападения
- низкая частота повторения
ОЗУ
- оперативное запоминающее устройство
ол
- обычный луч
ОТР
- оперативно-тактическая ракета
ОУ
- объект управления
оэс
- оптико-электронная система
ПАД
- полуавтономные действия
ПАП
- постановщик активных помех
ПВО
- противовоздушная оборона
пз
пл
- помехозащита
ПН
- пункт наведения
пнк
пнч
по
ппм
- пилотажно-навигационный комплекс
ППРЧ
- программируемая перестройка радиочастоты
ппс
- передняя полусфера
ΠΡΡ
- противорадиолокационная ракета
ПУ
- пульт управления
РДС
- режим дискретного сопровождения
РИ
- разведывательная информация
РК
- радиокоррекция
РЛДН
- радиолокационный дозор и наведение
РЛЗ
- радиолокационная заметность
РЛИ
- радиолокационная информация
РЛП
- радиолокационное поле
РЛС
- радиолокационная система
РСА
- радиолокатор с синтезированной апертурой
РСН
- равносигнальное направление
РТК
- радиотехнический комплекс
РТР
- радиотехническая разведка
РЭБ
- радиоэлектронная борьба
- подводная лодка
- перестройка несущей частоты
- программное обеспечение
- приёмо-передающий модуль
РЭП
РЭС
- радиоэлектронное подавление
- радиоэлектронная система
СА
— синтезирование апертуры
САД
- система автономных датчиков
САУ
- система автоматического управления
САЗО
- система активного запроса-ответа
САП
- станция активных помех
СБ
- стратегические бомбардировщики
СВКН
- средства воздушно-космического нападения
СВН
- средства воздушного нападения
СВЧ
- сверхвысокочастотный
его
сдц
ско
- система государственного опознавания
СКР
- стратегическая крылатая ракета
СКРУ
- система командного радиоуправления
СМЛА
- сверхманёвренный летательный аппарат
СМУ
- сложные метеоусловия
сне
- спутниковая навигационная система
СП
- средства поражения
епк
спн
- система передачи команд
СРТР
— станция радиотехнической разведки
СТОУ
- статистическая теория оптимального
управления
СУР
- система управления ракеты
счп
- средняя частота повторения
ТА
- тактическая авиация
твд
ткс
ттх
- театр военных действий
УБЛ
- уровень боковых лепестков
УВД
- управление воздушным движением
УКВ
- ультракороткие волны
- селекция движущихся целей
- среднеквадратическое отклонение, среднеквадратическая
ошибка
- станция помех наземная
- типовой комплекс связи
- тактико-технические характеристики
УНД
УПЧ
- устранение неоднозначности по дальности
- усилитель промежуточной частоты
ФАР
- фазированная антенная решетка
ФВ
ФД
- фазовращатель
ФКМ
- фазокодоманипулированный
ФП
- функциональное поражение
ФПО
- функциональное программное обеспечение
ФПРВ
- функция плотности распределения вероятностей
ФСА
- фокусированное синтезирование антенны
ЦВМ
- цифровая вычислительная машина
ЦУ
- целеуказания
чм
чпи
шип
- частотная модуляция
ЭВМ
- электронная вычислительная система
эвп
эмв
- электровакуумный прибор
- электромагнитные волны
ЭМИ
- электромагнитное излучение
эмс
- электромагнитная совместимость
ЭПР
- эффективная площадь рассеивания
- фазовый детектор
- частота повторения импульсов
- шумовые импульсные помехи
Научная
серия
«Системы мониторинга воздушного, космического пространства
и земной поверхности»
Редактор серии
Владимир Степанович Верба
Авиационные комплексы
радиолокационного дозора и наведения
Состояние и тенденции развития
А в т о р
Владимир Степанович Верба
Редактор Н. В. Комарова
Изд. № 22. Сдано в набор 06.10.2008.
Подписано в печать 24.10.2008. Формат 70x100 1/16.
Бумага офсетная. Гарнитура Тайме.
Печать офсетная
Печ. л. 27. Тираж 1000 экз. Зак. №3576
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: (495)621-48-37; 625-78-72, 625-92-41.
E-mail: infoiojradiotec.ru
www, radiotec.ru
Отпечатано в ООО ПФ «Полиграф-Книга»
160001, г. Вологда, ул. Челюскинцев, д. 3