Исследование управления спуском возвращаемого космического
advertisement

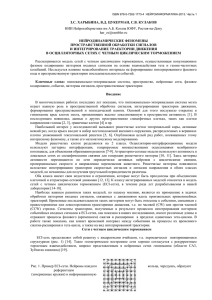
УДК 681.5 И.В. Русаков Московский физико-технический институт (государственный университет) ИССЛЕДОВАНИЕ УПРАВЛЕНИЯ СПУСКОМ ВОЗВРАЩАЕМОГО КОСМИЧЕСКОГО ЛА С ПЕРСПЕКТИВНОЙ РЕЗЕРВНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ НА НИЖНЕЙ ЧАСТИ ТРАЕКТОРИИ Отличительной особенностью перспективной резервной системы управления возвращаемым космическим ЛА (ВКЛА) является использование спутниковых навигационных систем (СНС) в качестве источника информации о параметрах движения ВКЛА. Слово «резервная» указывает на альтернативные способ получения навигационной информации и алгоритм формирования управления, а также на то, что алгоритм системы может использоваться вместо алгоритма имеющихся резервных систем управления при прерванном полете. Основным требованием к системе и ее главным преимуществом по отношению к алгоритмам имеющихся резервных систем управления КЛА типа «Союз» является возможность выбора и коррекции географического положения конечной точки траектории, в которой достигаются конечные условия полета (например, зоны раскрытия парашюта или области предпосадочного маневрирования). Поэтому при разработке перспективной системы управления спуском особое внимание должно быть уделено исследованию маневренных возможностей ВКЛА, оснащенного этой системой. Еще одним привлекательным моментом является существенно меньшее значение перегрузки по сравнению с перегрузкой при баллистическом спуске, который реализуется современными резервными системами управления на аварийных режимах. На траектории спуска можно условно выделить верхнюю (высоты порядка 30 ÷ 100 км и скорости более 3 ÷ 4 М) и нижнюю часть (высоты менее 30 км и скорости менее 3 ÷ 4 М) В верхней части траектории возможности маневрирования ограничены термодинамическими нагрузками на ВКЛА [1], но эти ограничения компенсируются большими запасами высоты и скорости для достижения требуемой дальности спуска [2], [3]. В нижней части траектории ограничений по тепловому режиму нет, но запасы высоты и скорости ограничены, следовательно, меньше возможностей компенсировать ошибки в управлении. В связи с описанными особенностями, на нижней части траектории спуска необходим алгоритм управления, обеспечивающий широкий диапазон продольной и боковой дальности – расстояний между проекциями точек траектории на земную поверхность, и устойчивость по отношению к внешним возмущениям, что может быть достигнуто вовлечением экипажа в процесс управления спуском, т.е. интерактивной обратной связью. В качестве базового управления на нижней части траектории рассматривается управление ВКЛА посредством изменения только угла крена. Исследуется влияние на располагаемые продольную и боковую дальности таких факторов, как число коррекций угла крена, величина и момент выполнения коррекций (рис. 1), а также влияние ветровых возмущений на точность приведения. 2.5 x 10 4 2 1.5 1 m , Y 0.5 0 -0.5 -1 -1.5 4.5 5 5.5 6 X, m 6.5 7 7.5 x 10 4 Рис. 1. Типичные зависимости положения конечной точки от момента и величины перекладки по крену С целью выбора управляющих параметров из условия приведения в некоторую географическую область, предполагается нахождение некоторого числа конечных точек путем численного интегрирования уравнений движения и дальнейшей аппроксимации исследуемых зависимостей. Исследование проводится на математической модели траекторного движения ВКЛА без учета тепловых потоков, вращения и кривизны поверхности Земли, с учетом конечной скорости изменения угла крена, путем численного интегрирования дифференциальных уравнений. Литература 1. Нейланд В.Я., Тумин А.М. Аэротермодинамика воздушно-космических самолетов. Конспект лекций. – Жуковский: ФАЛТ МФТИ, 1991. 2. Ярошевский В.А. Вход в атмосферу космических летательных аппаратов. – Москва: Наука, 1988. 3. Ярошевский В.А. Приближенное вычисление потребной и располагаемой боковой дальности, реализуемой при спуске космического летательного аппарата в заданную точку на поверхности Земли // Космические Исследования МАИК «Наука/Интерпериодика». 2005. Т. 43. №. 6.