9 ЭНЕРГЕТИЧЕСКИЕ ПРОЦЕССЫ И ЭФФЕКТИВНОСТЬ
реклама

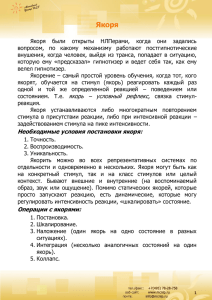
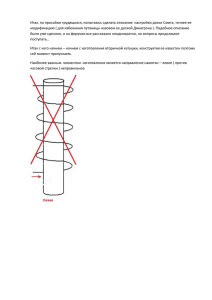
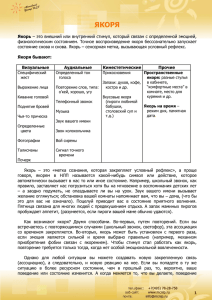
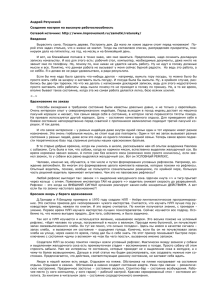
УДК 621.313:536.2.24:539.2 В.Ф. Болюх, А.М. Марков, В.Ф. Лучук, И.С. Щукин ЭНЕРГЕТИЧЕСКИЕ ПРОЦЕССЫ И ЭФФЕКТИВНОСТЬ ИНДУКЦИОННОДИНАМИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ УДАРНОГО ДЕЙСТВИЯ Показано, що характер протікання енергетичних процесів індукційно-динамічного перетворювача ударної дії суттєво визначається формою імпульсу струму збудження. Розглянуті схеми збудження індуктора від ємнісного накопичувача, що реалізують перемінно-полярний, однопівперіодний і аперіодичний імпульси. Проаналізовані критерії ефективності, що враховують: корисну роботу та втрати в активних елементах; корисну роботу та енергію джерела; прискорювальну масу, енергію джерела та імпульс аксіальної сили, яка діє на якір, а також залишкову енергію в ємнісному накопичувачі. Показано, что характер протекания энергетических процессов индукционно-динамического преобразователя ударного действия во многом определяется формой импульса тока возбуждения. Рассмотрены схемы возбуждения индуктора от емкостного накопителя, реализующие переменно-полярный, однополупериодный и апериодический импульсы. Проанализированы критерии эффективности, учитывающие: полезную работу и потери в активных элементах; полезную работу и энергию источника; ускоряемую массу, энергию источника и импульс аксиальной силы, действующий на якорь, а также остаточную энергию в емкостном накопителе. ВВЕДЕНИЕ Целью статьи является анализ энергетических проУдарные электромеханические преобразователи цессов и оценка критериев эффективности, учитывающая являются одними из наиболее эффективных уст- различные аспекты преобразования энергии в ИДП. ройств, предназначенных для ускорения различных МАТЕМАТИЧЕСКАЯ МОДЕЛЬ массивных объектов до высоких скоростей или возПри возбуждении неподвижного индуктора от буждения силовых импульсов повышенной мощности. Среди указанного класса устройств особое место за- ЕНЭ в коаксиально установленном электропроводянимает индукционно-динамический преобразователь щем якоре наводятся вихревые токи, взаимодействие (ИДП) ударного действия, обеспечивающий индукци- которых с магнитным полем индуктора приводит к онное взаимодействие стационарного индуктора, ко- возникновению аксиальной электродинамической торый импульсно возбуждается от емкостного нако- силы, приводящей к отталкиванию якоря от индуктопителя энергии (ЕНЭ), и электропроводящего якоря, ра. Для учета неравномерности распределения индуустановленного с возможностью аксиального пере- цированных токов в массивном ускоряемом якоре в мещения относительно индуктора [1, 2]. В результате электрической схеме замещения якорь можно предтакого взаимодействия на начальном этапе рабочего ставить совокупностью N элементарных короткозамкпроцесса происходит импульсное отталкивание элек- нутых контуров, равномерно распределенных по поверхности диска и имеющих изменяемую магнитную тропроводящего якоря от стационарного индуктора. На основе ИДП разрабатываются различные ли- связь с первичным контуром – индуктором, подклюнейные ускорители массивных объектов, называемые чаемым к емкостному накопителю. В таком случае в иностранной литературе coil-gun, и ударные индук- электрические процессы в ИДП можно описать сисционно-динамические электродвигатели, развиваю- темой дифференциальных уравнений [5]: t щие значительные механические нагрузки импульсноdi di го характера [3, 4]. Эти преобразователи характери- R0 (T0 ) ⋅ i0 + L0 dt0 + C1 ∫ i0 dt + M 01 ( z ) dt1 + ... + M 0k ( z ) × зуются кратковременным рабочим циклом, высокими 0 скоростными показателями, развиваемыми на коротdi dM 0k ⎞ ⎛ dM 01 × k + V (t )⎜ i1 + ... + ik ком активном участке, и удельными параметрами, ⎟ = U0 ; dt dz dz ⎠ ⎝ обусловленными интенсивными импульсными нагрузками при незначительной массе, что связано с R (T ) ⋅ i + L di1 + M ( z) di0 + M di2 + ... + M dik + 1 1 1 1 01 12 1k отсутствием специального магнитопровода. dt dt dt dt Однако для ИДП характерна низкая эффективdM dM dM ⎛ ⎞ 01 1k 12 + ... + i ность преобразования накопленной энергии ЕНЭ в + V ( t )⎜ i 0 + i2 ⎟ = 0; k dz dz ⎠ dz механическую, совершаемую подвижным якорем. ⎝ Полезная механическая работа может представлять di di di собой, например, разгон исполнительного элемента до Rk (Tk ) ⋅ ik + Lk dtk + M 0k ( z ) dt0 + M 1k dt1 + ... + M k −1k × высокой скорости, быстрое объемное сжатие газа, ударное деформирование жесткого объекта, срабаты- × dik −1 + V (t )⎛⎜ i dM 0k + i dM1k + ...i dM k −1k ⎞ = 0 , ⎟ 1 k −1 вание пускового механизма, возбуждение силового ⎜ 0 dt dz dz dz ⎠ ⎝ импульса, например, в земле при сейсморазведке, в где i , L , R – соответственно ток, индуктивность и 0 0 0 активном объеме испытательного стенда и др. индуктора; ik, Lk, Rk - соответственно Из-за невысокой эффективности электромехани- сопротивление ток , индуктивность элементарного ческого преобразования в ИДП возникают вопросы: короткозамкнутого k-игосопротивление якоря, перемещаюкуда уходит значительная часть энергии, обуславливая щегося со скоростью V(t)контура вдоль оси z относительно повышенные потери, и каким образом эту энергию индуктора; M - взаимоиндуктивность между соотkp можно перенаправить в полезную работу. В отличие от электромеханических преобразова- ветствующими токовыми контурами (k≠p); Tk – темтелей продолжительного действия для ИДП ударного пература k-го токового контура; C, U0 – соответствендействия не разработаны общепринятые критерии но емкость и напряжение ЕНЭ. Аксиальное перемещение ΔZ якоря с исполниоценки эффективности их работы. Електротехніка і Електромеханіка. 2009. №2 9 тельным элементом возникает под действием электродинамической силы f z (t ) = i0 (tn ) ⋅ N ∑ k ik (tn ) dM 0k ( z) , dz и их скорость можно представить в виде рекуррентного соотношения: V (tn +1 ) = V (tn ) + tn +1 − tn dM 0k i0 (tn ) ⋅ ∑ ik (tn ) − KP × m1 + m2 dz k × ΔZ (tn ) − KT ⋅V (tn ) − 0,125 ⋅ π ⋅ γ aβ a D22mV 2 (tn ) , где m1, m2 - масса якоря и исполнительного элемента, соответственно; KP - коэффициент упругости пружины; KT - коэффициент динамического сопротивления; γa - плотность воздуха; βa - коэффициент аэродинамического сопротивления; D2m - наружный диаметр силовой пластины. j, А/мм2 1250 1000 750 j2 500 АИ ОИ ППИ 250 0 -250 j1 -500 0 0,5 1,0 Рис. 1 1,5 2,0 t, мс Характер протекания токов в активных элеменДля определения температуры индуктора или тах преобразователя во многом определяется схемой якоря, изменяемой в течение рабочего процесса и рас- возбуждения индуктора . Однако различия в токах пределенной по сечению, используется нелинейное проявляются лишь через определенное время уравнение теплопроводности (0,6…0,7 мс) после начала рабочего процесса. При ⎛ ∂ 2T этом в схемах ОИ и АИ ток индуктора не меняет по1 ∂T ∂ 2T ⎞⎟ ∂T c * (T ) ⋅ γ + j 2 ( t ) ⋅ k z ⋅ ρ (T ) , + = λ w (T ) ⎜ + лярности, а ток якоря изменяет полярность через 2 2 ⎜ ∂r r ∂r ∂z ⎟⎠ ∂t ⎝ 0,8…0,9 мс. Вследствие этого электродинамическая где c*(T) - усредненная удельная теплоемкость; γ - усред- сила между якорем и индуктором меняет характер ненная плотность материала; j(t) - плотность тока; λw(T) - взаимодействия из отталкивания на притяжение. При коэффициент теплопроводности; kz - коэффициент за- этом необходимо учитывать, что на якорь помимо полнения индуктора; ρ(T) – удельное сопротивление. электродинамической действуют и иные силы, прежде Рассмотрим ИДП, обеспечивающий стремитель- всего – это сила сжатия пружины, направленные проный разгон исполнительного элемента и сжатие упру- тивоположно силе отталкивания якоря от индуктора. гой пружины. В качестве базового варианта принят На рис. 2 представлены результирующая сила f, преобразователь, индуктор и якорь которого выпол- действующая на якорь, который перемещается на раснены в виде коаксиально расположенных дисков с стояние ΔZ со скоростью V, а также значения превынаружным диаметром 100 мм. Индуктор представляет шений температур индуктора θ1 и якоря θ2 для схемы собой пропитанный эпоксидной смолой плоский диск ППИ (жирные линии), схемы ОИ (тонкие линии) и высотой 10 мм, который плотно намотан в два ряда схемы АИ (линии с метками). медной шиной прямоугольного сечения. Якорь выАксиальная сила, действующая на якорь, имеет полнен в виде медного диска толщиной 2,0 мм. Для импульсный характер, обусловленный электродинавозбуждения индуктора используется ЕНЭ с базовыми мическим отталкиванием от индуктора, с последуюпараметрами U0=500 В и C=3000 мкФ. Масса уско- щим изменением знака, связанного в основном с возряемого исполнительного элемента составляет действием сжимаемой пружины (рис. 2,а). Из-за измеm2=0,25 кг. В исходном состоянии якорь плотно при- нения полярности аксиальной силы начинает сразу же жат к индуктору при помощи возвратной пружины, снижаться скорость, которая через определенное врекоторая взаимодействует с исполнительным элемен- мя меняет знак. Якорь вместе с исполнительным элетом и имеет коэффициент упругости KP=75 кН/м. ментом перемещается на некоторое максимальное При расчетах будем полагать отсутствие дефор- расстояние от индуктора ΔZm, после чего следует обмации элементов преобразователя и отдачи индукто- ратное движение (рис. 2,б). ра, считая перемещения якоря строго аксиальным. При всех схемах возбуждения начальные элекВлиянием вспомогательных элементов преобразова- тромеханические и тепловые параметры одинаковы, в теля, в частности подводящих и соединительных про- том числе максимальные значения силы f и скорости водов, электронных приборов пренебрегаем. V, однако в последующем наблюдается значительное Рассмотрим три схемы возбуждения индуктора: различие. Так максимальное перемещение якоря и - "переменно-полярный импульс" (ППИ), при которой скорость в конце рассматриваемого временного инреализуется полный разряд ЕНЭ с возникновением тервала наблюдаются при использовании схемы ППИ. колебательно-затухающего тока; Однако при такой схеме наблюдается наибольший - "однополупериодный импульс" (ОИ), при которой реа- нагрев якоря, в то время как индуктор наибольше нализуется полярный однополупериодный импульс тока с гревается при использовании схемы АИ (рис. 2,в). помощью тиристора при сохранении заряда в ЕНЭ; Рассмотрим энергетические диаграммы рассматри- "апериодический импульс" (АИ), при которой реали- ваемого преобразователя при использовании указанных зуется полярный апериодический импульс тока с по- схем возбуждения. На рис. 3 показана динамика изменемощью тиристора при шунтировании индуктора обрат- ния основных составляющих энергий в ИДП в течение ным диодом и отсутствии остаточного заряда в ЕНЭ. рабочего процесса при использовании схем возбуждения На рис. 1 представлены плотность тока в непод- индуктора: ИИП (а), ОИ (б) и АИ (в). вижном индукторе j1 и усредненная плотность тока в перемещаемом якоре j2 при использовании указанных схем возбуждения индуктора. 10 Електротехніка і Електромеханіка. 2009. №2 f, кН; 20 V, м/с W, о.е. 1 Wpr V 15 0.8 10 0.6 Wc Wkin Wm Wp2 f 5 0.4 0 0.2 -5 0 ΔZ, мм 50 0,5 1,0 1,5 2,0 t, мс а) Wp1 0 0 1 2 3 4 W, о.е.1 40 0.8 30 0.6 t, мс а) Wpr Wkin Wc Wm 20 0.4 Wp2 10 0.2 Wp1 0 0 θ, К 6 1 2 3 4 t, мс б) 0 0 W, о.е. 1 1 2 3 Wkin 4 t, мс б) 4 t, мс в) Wpr Wc 5 0.8 Wm 4 Wp2 0.6 θ2 3 0.4 2 θ1 0.2 1 0 0 1 2 Рис. 2 3 4 t, мс в) W p1 = Wp2 = ∫ i02 (t ) R0 dt – потери в индукторе; N t ∑ ∫ ik2 (t ) Rk dt – потери в якоре; k N +1 N +1 N k =0 k = 0 n =1 Wm = 0,5 ∑ Lk ik2 (t ) + магнитная энергия; ∑ ∑ M kn ( z ) ⋅ ik (t ) ⋅ in (t ), 0 1 2 Рис. 3 Составляющими энергиями являются: t 0 Wp1 (k ≠ n) – Wkin = 0,5(m1 + m2 ) ⋅V 2 (t ) – кинетическая энергия; Wc = 0,5 ⋅ C ⋅ uc2 (t ) – энергия ЕНЭ; W pr = 0,5 ⋅ K P ΔZ 2 (t ) – энергия сжатия пружины. Електротехніка і Електромеханіка. 2009. №2 3 Как следует из рис. 3 характер изменения различных составляющих энергий во многом зависит от схемы возбуждения преобразователя. Так, при использовании схемы ППИ, реализующей полный разряд ЕНЭ, к концу рассматриваемого рабочего интервала основными становятся все возрастающие потери в индукторе Wp1 и якоре Wp2. Здесь наблюдается колебательный процесс между энергией магнитного поля Wm и энергией ЕНЭ Wc, оказывающий влияние и на остальные составляющие энергий (рис. 3,а). При использовании схемы ОИ, реализующей однополупериодный импульс, потери в индукторе и якоре выходят на стабильный уровень уже через 1,5…2 мс, не достигая столь значительных величин, как в схеме ППИ. При этом энергия магнитного поля Wm быстро затухает, и к концу рассматриваемого рабоче11 го интервала основной становится сохраненная энер- на сжимаемую пружину [9] гия в ЕНЭ Wc (рис. 3,б). 2 t ⎞ При использовании схемы АИ, реализующей 100 ⋅ C −1U 0− 2 ⎛⎜ ⎟ f (t, z )dt ,% . η3 (t ) = апериодический импульс, основная часть энергии ⎟ m1 + m2 ⎜ ∫ ⎝0 ⎠ идет на нагрев индуктора, энергия магнитного поля Рассмотрим динамику изменения этих критериев затухает, но постепенно, в то время как энергия емкостного накопителя обнуляется практически в начале при использовании схемы ППИ (а), ОИ (б) и АИ (в) (рис. 4). (0,8 мс) рабочего процесса (рис. 3,в). Отметим, что кинетическая энергия Wkin и энерη, % 30 гия сжатия пружины Wpr в процессе работы ИДП, перераспределяется между собой, переходя из одной в η 25 другую, практически сохраняя неизменную их суммарную величину. Однако при отсутствии пружины η η эта суммарная энергия, представляющая собой лишь 20 кинетическую энергию, снижается по сравнению с их суммарным значением, что объясняется более суще15 ственным уменьшением магнитной связи между индуктором и якорем. 10 КРИТЕРИИ ЭФФЕКТИВНОСТИ Для оценки эффективности работы ИДП исполь5 зуем ряд критериев, оценивающих его работу с различных аспектов. В традиционных электрических ма0 0 1 2 3 4 t, мс шинах продолжительного действия в качестве критеа) рия эффективности для двигателей используется КПД η, % 30 – отношение полезной механической к подведенной η электрической мощности. При этом оперируют ус25 редненными во времени значениями мощностей, например за период, не учитывая изменений для каждо20 го конкретного момента времени. Для ИДП ударного действия использовать понятия мощности не целесообразно. Здесь необходимо 15 оперировать понятиями энергии, анализируя, каким образом энергия заряженного ЕНЭ преобразуется в 10 кинетическую или иную механическую энергию за η η рабочий цикл. При этом можно использовать началь5 ные и конечные значения энергий для ИДП. Однако более перспективным является представление критериев эффективности не в виде одного значения, а в 0 0 0,5 1,0 1,5 2,0 t, мс виде динамически изменяемой величины, что позвоб) ляет оценивать потенциальные возможности преобраη, % 30 зователя на основе, например, максимальных значений критериев, предусматривая возможность преры25 вания рабочего процесса, например, путем ограничеη ния тока в индукторе при помощи электронной схемы. 20 Поскольку преобразование энергии емкостного накопителя в полезную работу (ускорение якоря и сжатие пружины) сопровождается потерями в неподвиж15 ном индукторе и ускоряемом якоре, первый критерий эффективности можно выразить следующим образом: 10 1 2 3 3 2 1 1 η1 (t ) = [ 100 ⋅ (m1 + m2 ) ⋅ V 2 (t ) + K p ⋅ ΔZ 2 (t ) N +1t ] (m1 + m2 ) ⋅ V 2 (t ) + 2 ∑ ∫ ik2 (t ) Rk (Tk )dt + K p ⋅ ΔZ 2 (t ) ,% η3 η2 5 k =00 0 Аналогичное выражение для критерия эффектив0 1 2 3 4 t, мс в) ности ИДП использовано в работах [1, 6]. Рис. 4 Второй критерий эффективности использует отношение полезной работы к исходной энергии ЕНЭ Все критерии эффективности резко возрастают в начале работы преобразователя, после чего наблюдает(m1 + m2 )⋅V 2 (t ) + K p ΔZ 2 (t ) η2 (t ) = 100 ,% . ся их понижение. Критерий η1, учитывающий потери в C ⋅U 02 индукторе и якоре, возрастает до наибольшей величины Аналогичное выражение для критерия эффектив- (около 24%), но он и сильнее снижается. Критерии η2 и ности ИДП использовано в работах [7, 8]. η в начале рабочего процесса практически совпадают, Третий критерий эффективности можно выра- а 3различие между ними проявляется позже. До первого зить через значение импульса аксиальной силы, воз- максимума характер поведения всех критериев не завидействующей на якорь в течение всего рабочего про- сит от схемы возбуждения индуктора, однако в конце цесса, что важно, например, для силового воздействия 12 Електротехніка і Електромеханіка. 2009. №2 наблюдается интересная особенность – возрастание критерия η1 при использовании схемы ППИ, в то время как в остальных схемах величина этого критерия со временем понижается. Таким образом, по всем указанным выше критериям наиболее эффективной является схема ППИ, а наименее эффективной – схема АИ. Заметим, что только при использовании схемы АИ можно применять полярный ЕНЭ, выполненный на базе компактных электролитических конденсаторов большой емкости [5]. В схеме возбуждения ОИ после рабочего цикла сохраняется значительная часть энергии в ЕНЭ, которую можно использовать для последующего рабочего цикла. Если учитывать только потраченную энергию ЕНЭ на рабочий цикл, второй и третий критерии можно видоизменить следующим образом: η*2 (t ) = 100 (m1 + m2 ) ⋅ V 2 (t ) + K p ΔZ 2 ( ( C ⋅ U 02 − U12 100 ⋅ C −1 U 02 − U12 m1 + m2 ) −1 ⎛ t ⎜ ⎜ ⎝0 ) ,% , ⎞ f (t, z )dt ⎟ ⎟ ⎠ 2 η, % 70 емкости и соответствующим уменьшением зарядного напряжения снижаются все электромеханические параметры преобразователя: максимальные значения аксиальной силы fm, скорости Vm и перемещения ΔZm якоря (рис. 7,а). В результате такого перераспределения параметров источника уменьшаются и все критерии эффективности ИДП. f,кН V,м/с ΔZ, мм 40 ΔZm 30 ,% , ∫ где U1 – остаточное напряжение ЕНЭ после рабочего цикла. η*3 (t ) = %, η2,3 – на 18 %, η*2,3 – на 66 %. Заметим, что критерии η2 и η3 изменяются практически синхронно, хотя учитывают различные аспекты работы ИДП. Параметры емкостного накопителя – напряжение U0 и емкость C, при сохранении его энергии существенно влияют на эффективность работы электромеханического преобразователя (рис. 7). С увеличением ОИ Vm fm 20 10 60 50 η*2 η*3 40 0 0 0,1 0,2 0,3 0,4 m2, кг а) 0,4 m2, кг б) η, % 100 80 30 η*2 20 ППИ 60 η*3 10 40 0 0 0,5 1,0 Рис. 5 1,5 2,0 t, мс ВЛИЯНИЕ ПАРАМЕТРОВ ИДП НА ЕГО ЭФФЕКТИВНОСТЬ Рассмотрим влияние массы ускоряемой нагрузки и соотношений параметров ЕНЭ на эффективность работы преобразователя, возбуждаемого по схеме ОИ. На рис. 6,а представлены зависимости максимальных значений аксиальной силы fm, скорости Vm и перемещения ΔZm якоря в зависимости от массы ускоряемого исполнительного элемента. С увеличением массы ускоряемой исполнительного элемента m2 максимальные значения скорости и перемещения якоря снижаются, но при этом величина действующей на якорь электродинамической силы возрастает. Последнее обстоятельство объясняется более сильным магнитным взаимодействием якоря и индуктора. В результате увеличения массы ускоряемого исполнительного элемента от 0 до 0,5 кг эффективность ИДП по всем критериям снижается, даже критериев η3 и η*3, учитывающих импульс электродинамической силы, действующей на якорь (рис. 6,б). Однако степень уменьшения этих критериев различна: η1 – на 41 Електротехніка і Електромеханіка. 2009. №2 η1 20 0 η3 0 η2 0,1 0,2 Рис. 6 0,3 Поскольку при минимальных значениях емкости и массы ускоряемого исполнительного элемента рассматриваемого диапазона параметров эффективность преобразователя максимальна, рассмотрим энергетические процессы ИДП, который возбуждается от ЕНЭ с энергией 375 Дж и емкостью 1 мФ при отсутствии исполнительного элемента (m2 = 0) (рис. 8). По сравнению с базовым вариантом (рис. 2,б) критерии эффективности данного преобразователя существенно повышаются: η1 – на 40,6%, η2 – на 56,7%, η3 – на 57,5%. Это достигается за счет снижения потерь в индукторе Wp1 на 33,6 % и в якоре Wp2 – на 22%, что можно объяснить более короткими токовыми импульсами. А механическая энергия, представляющая собой сумму энергий кинетической Wk и сжатия пружины Wpr, возрастает на 40 %. 13 40 f,кН V,м/с ΔZ, мм Показано, что при использовании схемы, обеспечивающей однополупериодный импульс тока в индукторе, энергия в ЕНЭ частично сохраняется после рабочего цикла, и критерий эффективности ИДП, учитывающий остаточную энергию, превышает 60%. Установлено, что при минимальных значениях емкости и массы ускоряемого исполнительного элемента эффективность преобразователя максимальна, что объясняется более короткими, но мощными силовыми импульсами, действующими на якорь. СПИСОК ЛИТЕРАТУРЫ ΔZm 30 fm 20 Vm 10 0 1 1,5 2,0 2,5 3,5 С, мФ 3,0 η, % 100 а) η*3 80 η*2 60 шения сводов и очистки технологического оборудования от налипших материалов", Электротехника, № 11, С. 24-28, 40 η1 η2,3 20 0 1 1 1,5 2,0 2,5 3,0 3,5 С, мФ Рис. 7 W, о.е. б) Wpr 0.8 Wk Wc 0.6 Wm 0.4 Wp2 0.2 Wp1 0 0 1 2 3 4 t, мс Рис. 8 ЗАКЛЮЧЕНИЕ Характер протекания энергетических процессов ИДП ударного действия во многом определяется схемой возбуждения индуктора от ЕНЭ, реализующей переменно-полярный, однополупериодный или апериодический импульс тока. Проанализированы критерии эффективности, учитывающие: полезную работу и потери в активных элементах; полезную работу и энергию ЕНЭ; ускоряемую массу, энергию ЕНЭ и импульс аксиальной силы, действующий на якорь. Исследована динамика изменения этих критериев для основных схем возбуждения индуктора. 14 1. J.A.Andrews, J.R.Devine, "Armature design for coaxial induction launchers", IEEE Trans. Magnetics, vol. 27, № 1, pp. 639-643, 1991. 2. Ю.Н.Васьковский, С.М.Рогач, В.Т.Чемерис, "Математическое моделирование индукционно-динамического ударного двигателя", Техн. электродинамика, № 4, С. 42-48, 1984. 3. R. Kaye, "Operational requirements and issues for coilgun electromagnetic launchers", IEEE Trans. Magnetics, vol. 41, № 1, pp. 194-199, 2005. 4. В.А. Тютькин, "Магнитно-импульсный способ разру- 2002. 5. В.Ф.Болюх, А.М.Марков, В.Ф.Лучук, И.С.Щукин, "Теоретические и экспериментальные исследования индукционнодинамического двигателя, возбуждаемого от полярного емкостного накопителя", Техн. електродинаміка. Тем. випуск: Проблеми сучасної електротехніки, Ч. 2, сс. 65-70, 2006. 6. B.M.Novac, P.Senior, I.R.Smith et al, "Studies of a very high efficiency cryogenic launcher", IEEE Trans. Magnetics, vol. 37, № 1, pp. 123-128, 2001. 7. M.Liao, Z.Zabar, D.Czarkowski et al, "On the design of a coilgun as a rapid-fire grenade launcher" // IEEE Trans. Magnetics, vol. 35, № 1, pp. 148-153, 1999. 8. В.П.Гальетов, Е.Г.Иванов, "Повышение эффективности электромагнитного индукционного ускорителя проводников", Журнал прикладной механики и техн. физики, № 4, С. 105-108, 1979. 9. В.Ф.Болюх, "Эффективность электромеханических импульсных преобразователей индукционного типа. Критерии и анализ", Електротехніка і електромеханіка, № 3. - С. 13-18, 2004. Поступила 26.09.08 Болюх Владимир Федорович, д.т.н., проф., Марков Александр Михайлович, с.н.с., Лучук Владимир Федосеевич, к.т.н., с.н.с., Щукин Игорь Сергеевич, к.т.н., доц. Национальный технический университет "Харьковский политехнический институт" Украина, 61002, Харьков, ул. Фрунзе, 21, НТУ "ХПИ", каф. "Общая электротехника" и "Электрические машины", тел. (057) 70-76-427, e-mail: bolukh@kpi.kharkov.ua, tech@tetra.kharkiv.com. Електротехніка і Електромеханіка. 2009. №2